机器人概论-简版
- 格式:ppt
- 大小:7.56 MB
- 文档页数:33
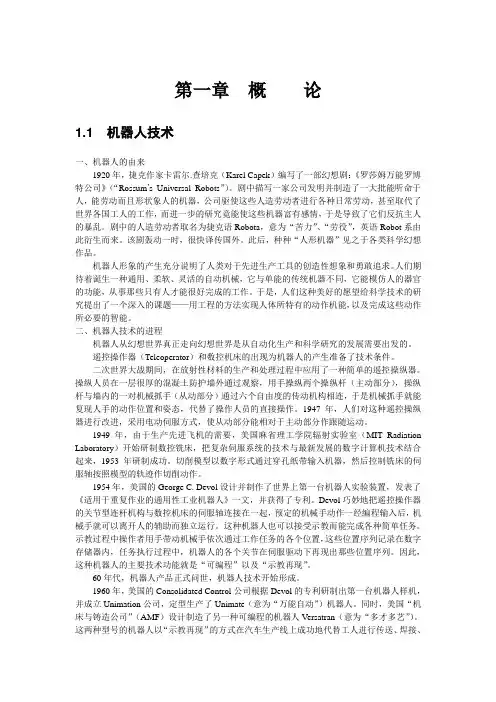
第一章概论1.1 机器人技术一、机器人的由来1920年,捷克作家卡雷尔.查培克(Karel Capek)编写了一部幻想剧:《罗莎姆万能罗博特公司》(“Rossum’s Universal Robots”)。
剧中描写一家公司发明并制造了一大批能听命于人,能劳动而且形状象人的机器,公司驱使这些人造劳动者进行各种日常劳动,甚至取代了世界各国工人的工作,而进一步的研究竟能使这些机器富有感情,于是导致了它们反抗主人的暴乱。
剧中的人造劳动者取名为捷克语Robota,意为“苦力”、“劳役”,英语Robot系由此衍生而来。
该剧轰动一时,很快译传国外。
此后,种种“人形机器”见之于各类科学幻想作品。
机器人形象的产生充分说明了人类对于先进生产工具的创造性想象和勇敢追求。
人们期待着诞生一种通用、柔软、灵活的自动机械,它与单能的传统机器不同,它能模仿人的器官的功能,从事那些只有人才能很好完成的工作。
于是,人们这种美好的愿望给科学技术的研究提出了一个深入的课题——用工程的方法实现人体所特有的动作机能,以及完成这些动作所必要的智能。
二、机器人技术的进程机器人从幻想世界真正走向幻想世界是从自动化生产和科学研究的发展需要出发的。
遥控操作器(Teleoperator)和数控机床的出现为机器人的产生准备了技术条件。
二次世界大战期间,在放射性材料的生产和处理过程中应用了一种简单的遥控操纵器。
操纵人员在一层很厚的混凝土防护墙外通过观察,用手操纵两个操纵杆(主动部分),操纵杆与墙内的一对机械抓手(从动部分)通过六个自由度的传动机构相连,于是机械抓手就能复现人手的动作位置和姿态,代替了操作人员的直接操作。
1947年,人们对这种遥控操纵器进行改进,采用电动伺服方式,使从动部分能相对于主动部分作跟随运动。
1949年,由于生产先进飞机的需要,美国麻省理工学院辐射实验室(MIT Radiation Laboratory)开始研制数控铣床,把复杂伺服系统的技术与最新发展的数字计算机技术结合起来,1953年研制成功。
《我看机器人》学院:理学院学号:5502211005姓名:黄志涵班级:应用物理学111班摘要:在21世纪,随着科学技术的发展,机器人的研究和发展也将会更进一步。
机器人原本起源在美国,但其在美国的发展速度远远不如日本。
这里面主要的原因,可能是因为日本劳动力短缺,大部分需要劳动力的工厂得不到劳动力,所以日本政府大力发展机器人产业,用机器人代替短缺的劳动力资源。
本文通过三部分简要阐述有关机器人一些发展和应用,以及未来机器人更大的应用前景。
关键词:机器人,机器人发展史,关键技术,分类,应用正文:第一部分:机器人的发展史从1920年捷克斯洛伐克作家卡雷尔·恰佩克在他的科幻小说《罗萨姆的机器人万能公司》中,根据Robota(捷克文,原意为“劳役、苦工”)和Robotnik(波兰文,原意为“工人”),创造出“机器人”这个词。
机器人历史有了如下的发展:1939年美国纽约世博会上展出了西屋电气公司制造的家用机器人Elektro。
它由电缆控制,可以行走,会说77个字,甚至可以抽烟,不过离真正干家务活还差得远。
但它让人们对家用机器人的憧憬变得更加具体。
1942年美国科幻巨匠阿西莫夫提出“机器人三定律”。
虽然这只是科幻小说里的创造,但后来成为学术界默认的研发原则。
1948年诺伯特·维纳出版《控制论》,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律,率先提出以计算机为核心的自动化工厂。
1954年美国人乔治·德沃尔制造出世界上第一台可编程的机器人,并注册了专利。
这种机械手能按照不同的程序从事不同的工作,因此具有通用性和灵活性。
1956年在达特茅斯会议上,马文·明斯基提出了他对智能机器的看法:智能机器“能够创建周围环境的抽象模型,如果遇到问题,能够从抽象模型中寻找解决方法”。
这个定义影响到以后30年智能机器人的研究方向。
1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。

南京工业大学公选课机器人概论机器人(Robot 是自动执行工作的机器装置。
它既可以接受人类指挥,又可以运行预先编排的程序, 也可以根据以人工智能技术制定的原则纲领行动 .现在, 国际上对机器人的概念已经逐渐趋近一致。
一般说来, 人们都可以接受这种说法, 即机器人是靠自身动力和控制能力来实现各种功能的一种机器。
随着高新技术的发展, 各种类型的军用机器人已经大量涌现, 一些技术发达的国家相继研制了智能程度高、动作灵活、应用广泛的军用机器人。
目前军用机器人主要是作为作战武器和保障武器使用。
在恶劣的环境下, 机器人的承受能力大大超过载人系统, 并且能完成许多载人系统无法完成的工作, 如运输机器人可以在核化条件下工作, 也可以在炮火下及时进行战场救护。
在地面上,机器人为联合国维和部队排除爆炸物、扫除地雷;在波黑战场上, 无人机大显身手;在海洋中,机器人帮助人清除水雷、探索海底秘密;在宇宙空间,机器人成了火星考察的明星。
机器人的历史并不算长, 1959年美国英格伯格和德沃尔制造出世界上第一台工业机器人,机器人的历史才真正开始。
英格伯格在大学攻读伺服理论, 这是一种研究运动机构如何才能更好地跟踪控制信号的理论。
德沃尔曾于 1946年发明了一种系统,可以“重演”所记录的机器的运动。
1954年 , 德沃尔又获得可编程机械手专利, 这种机械手臂按程序进行工作, 可以根据不同的工作需要编制不同的程序, 因此具有通用性和灵活性, 英格伯格和德沃尔都在研究机器人, 认为汽车工业最适于用机器人干活,因为是用重型机器进行工作,生产过程较为固定。
1959年,英格伯格和德沃尔联手制造出第一台工业机器人。
机器人分类 :关于机器人如何分类, 国际上没有制定统一的标准, 有的按负载重量分, 有的按控制方式分,有的按自由度分,有的按结构分,有的按应用领域分。
一般的分类方式:1. 示教再现型机器人通过引导或其它方式, 先教会机器人动作, 输入工作程序, 机器人则自动重复进行作业。
机器人技术基础机器人的发展工业机器人是应用于制造环境下以提高生产率的一种工具。
它的历史并不算长,直到1959年美国英格伯格和德沃尔制造出世界上第一台工业机器人,机器人的历史才真正拉开了帷幕。
二十世纪50、60年代,随着机构理论和伺服理论的发展,机器人进入了使用化阶段。
1954年美国的G.C.Devol发表了“通用机器人”专利;1960年美国AMF公司生产了柱坐标型Versatran机器人,可作点位和轨迹控制,这是世界上第一种用于工业生产上的机器人。
英格伯格在大学攻读一种研究运动机构如何才能更好地跟踪控制信号的伺服理论。
德沃尔曾于1946年发明了一种系统,可以“重演”所记录的机器的运动。
1954年,德沃尔又获得可编程机械手专利,这种机械手臂按程序进行工作,可以根据不同的工作需要编制不同的程序,因此具有通用性和灵活性,英格伯格和德沃尔都在研究机器人,认为汽车工业最适于用机器人干活,因为是用重型机器进行工作,生产过程较为固定。
1959年,英格伯格和德沃尔联手制造出第一台工业机器人。
工业机器人可用于承担常规的、冗长乏味的装配线工作,或执行那些对工人也许有危害的工作。
例如,在第一代工业机器人中,曾有一台被用于更换核电厂的核燃料棒。
从事这项工作的工人可能会暴露在有害量的放射线下。
工业机器人也能够在装配线上操作——安装小型元件,例如将电子元件安装在线路板上。
为此,工人可以从这种冗长乏味任务的常规操作中解放出来。
通过编程的机器人还能去掉炸弹的雷管、为残疾者服务以及在我们社会的众多应用中发挥作用。
机器人可被看作将臂端执行工具、传感器以及夹爪移动到某个预定位置的一台机器。
当机器人到达该位置,它将执行某个任务。
该任务可能是焊接、密封、机械装载、机械卸载,或许多装配工作。
除了编程以及打开和关闭系统之外,一般情况下,均不需要人们的参与就能完成这类工作。
机器人是一台可再编程的多功能机械手,它可通过可编程运动移动零件、物料、工具或特殊装置以执行某种不同任务。