交叉编译环境
- 格式:ppt
- 大小:281.00 KB
- 文档页数:24
交叉编译环境以及开发板上-binsh:.hello:notfound(使⽤arm-linu。
⽬标板是S3C2440.⾄于交叉编译环境的搭建就不多说了,⽹上很多教程.搭建好了交叉编译环境后,第⼀件事就是传说中的”Hello,World!”.⼀. 主机编译环节我使⽤的系统是ubuntu10.04,搭建好交叉编译环境后,终端输⼊arm-linux-gcc -v能够正常显⽰版本信息,但是输⼊sudo arm-linux-gcc -v后却显⽰命令⽆法找到.我试过很多种⽅法,⽐如sudo -s切换到root后,编辑$PATH,将编译器路径加⼊.然后exit到普通⽤户.仍然不能执⾏sudo arm-linux-gcc -v. 这⾥如果哪位⼤⽜知道是什么原因的可以留⾔告诉我,谢谢:)由于编译.c的⽂件后,要产⽣新的⽂件,因此要super的权限.⼜不能使⽤sudo arm-linux-gcc,于是可以先sudo -s到root⽤户,再使⽤arm-liunux-gcc来进⾏编译.⼆. ⽬标板执⾏环节我是使⽤FTP在主机和⽬标板之间传送⽂件.传送过去后要注意改变权限.这⾥要注意⼏点:1. 要确定ftp过来后的⽂件的默认的存放路径.这个只要在⽬标机的终端机上确认下即可.(这个地⽅没有确认可能就会显⽰找不到命令)2. 传送过来的⽂件要更改权限才能运⾏.可以⽤:chmod 777 hellochmod +x hello3. 执⾏./hello这时,报错:-/bin/sh: ./hello: not found三. 问题排除⽤过绝对路径也试过之后就确定并不是⽂件是否存在的问题,⽽是这个⽂件并不能被执⾏.GOOGLE之后可以发现,排除上⾯提到问题后,就将问题定位到动态链接库上.于是在主机上⽤arm-linux-gcc -static -o 来进⾏静态编译.然后将新产⽣的⽂件传到⽬标板上.可以发现通过静态编译的⽂件明显⽐动态编译的要⼤.然后再次执⾏./hello 可以看到屏幕上出现了久违的Hello,World!问题到这⾥还没有完,我们可以再思考下怎么彻底解决,⽽不是每次都使⽤静态编译.既然是动态库引起的问题,那么应该和编译器的版本有关.在安装编译环境的时候同时安装了3.4.1和4.3.3两个版本.⽤户⼿册上说其中3.4.1是⽤来编译u-boot的,4.3.3版本是⽤来编译Linux内核和Qtipia的,两个版本均可以⽤来编译应⽤程序.既然我们的内核使⽤4.3.3编译的,⽽我们刚才编译hello是使⽤3.4.1编译的,那么会不会是这个原因呢?于是我们试⼀下,将$PATH中的原来包含3.4.1/bin 的路径改为 4.4.3/bin . 修改的⽅法⽹上有很多.(直接export PATH=”想要的路径”)再次编译,下载.⽬标板上执⾏,成功显⽰”Hello,World!”.可以看到系统中动态库的⽀持和编译器还是有关的./lzjsky/p/3730183.html。
linux交叉编译环境搭建步骤在Linux系统下搭建交叉编译环境主要涉及以下几个步骤:2. 配置环境变量:将交叉编译工具链的路径添加到系统的环境变量中以便于使用。
可以在用户的`.bashrc`或`.bash_profile`文件中添加如下行:```bashexport PATH=<path_to_toolchain>/bin:$PATH```其中`<path_to_toolchain>`是指交叉编译工具链所在的路径。
3.设置目标平台的系统根目录:交叉编译时需要使用目标平台的系统库和头文件,因此需要设置目标平台的系统根目录。
可以通过以下方式设置:```bashexport SYSROOT=<path_to_sysroot>```其中`<path_to_sysroot>`是指目标平台的系统根目录。
4.编写一个简单的交叉编译项目:为了验证交叉编译环境是否搭建成功,可以编写一个简单的交叉编译项目进行测试。
例如,编写一个简单的C程序,将其交叉编译为ARM平台下的可执行文件。
```c#include <stdio.h>int maiprintf("Hello, world!\n");return 0;```将上述代码保存为`hello.c`文件。
然后,使用以下命令进行交叉编译:```basharm-linux-gnueabi-gcc -o hello hello.c```编译完成后,会生成一个名为`hello`的可执行文件。
在ARM平台上执行该可执行文件,将输出`Hello, world!`。
以上就是在Linux系统下搭建交叉编译环境的基本步骤。
根据具体的需求,可能还需要进行其他的配置和设置。
教你如何在优麒麟上搭建RISC-V交叉编译环境由于 RISC-V 设备价格昂贵、不易采购等诸多原因,许多⼩伙伴虽然很感兴趣,但仍⽆法参与 RISC-V 开发⼯作,今天就教⼤家如何在优麒麟上搭建 RISC-V 交叉编译环境,快学起来吧!交叉编译(Cross Compile)指编译代码的平台,和执⾏编译后源代码的平台是两个不同的平台,⽐如在 x86/Linux 平台下使⽤交叉编译⼯具链编译 ARM/Linux 平台下的可执⾏⽂件。
今天我们要讲的就是在优麒麟(x86/Linux)上编译 RISC-V 架构可执⾏⽂件的⽅法。
我们为什么需要交叉编译呢,主要有以下考虑:01.性能与速度交叉编译的⽬标平台往往 CPU 性能较差,内存和磁盘性能也可能不能满⾜编译的要求,这时候就要依赖性能资源更好的编译主机进⾏编译。
02.缺乏编译条件就算⽬标平台性能⾜够且资源充⾜,可以本地编译,但第⼀个在⽬标平台运⾏的本地编译器总是需要我们通过交叉编译获得。
03.软件编译环境⼀个完整的 Linux 发⾏版需要由数百个包构成,⽽我们往往只关注需要在⽬标主机上安装的包,所以我们可以在交叉编译的主机上配置这些环境,⽽不是把时间浪费在配置⽬标主机的编译依赖上。
本⽂包含以下两部分:1、如何搭建⼀个 RISC-V 的交叉编译环境。
2、交叉编译 Linux 内核。
⼀、搭建 RISC-V 交叉编译环境。
通常来讲,在搭建交叉编译环境时需要考虑不同体系架构的不同特性,包括 CPU 架构是 64 位还是 32 位系统、字节序是⼤端( big-endian )或⼩端( little-endian )、内存字节对齐⽅式等,不过好在 RISC-V 已经有完善的⼯具链,包含交叉编译所需的 binutils 、 gcc 和 glibc 3 个部分。
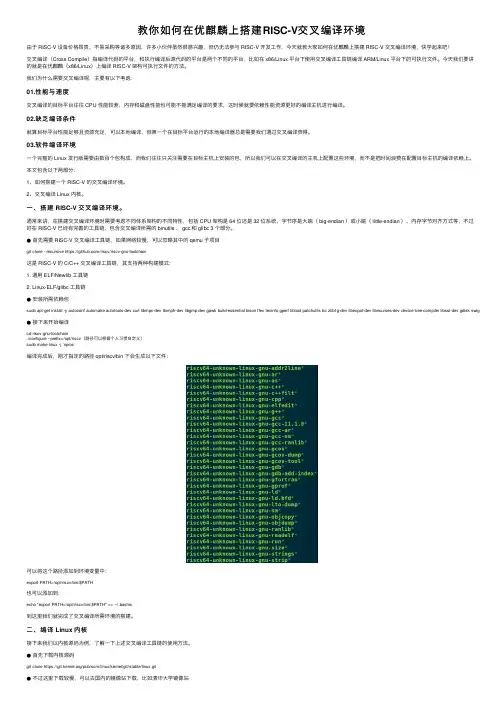
●⾸先需要 RISC-V 交叉编译⼯具链,如果⽹络较慢,可以忽略其中的 qemu ⼦项⽬git clone --recursive https:///riscv/riscv-gnu-toolchain这是 RISC-V 的 C/C++ 交叉编译⼯具链,其⽀持两种构建模式:1. 通⽤ ELF/Newlib ⼯具链2. Linux-ELF/glibc ⼯具链●安装所需依赖包sudo apt-get install -y autoconf automake autotools-dev curl libmpc-dev libmpfr-dev libgmp-dev gawk build-essential bison flex texinfo gperf libtool patchutils bc zlib1g-dev libexpat-dev libncurses-dev device-tree-compiler libssl-dev gdisk swig ●接下来开始编译cd riscv-gnu-toolchain./configure --prefix=/opt/riscv(路径可以根据个⼈习惯⾃定义)sudo make linux -j `nproc`编译完成后,刚才指定的路径 opt/riscv/bin 下会⽣成以下⽂件:可以将这个路径添加到环境变量中:export PATH=/opt/riscv/bin:$PATH也可以添加到:echo "export PATH=/opt/riscv/bin:$PATH" >> ~/.bashrc到这⾥我们就完成了交叉编译所需环境的搭建。
ubuntu下搭建MIPS交叉编译环境 由于要在本地编译程序,在嵌⼊式系统上运⾏,因此需要在本地装编译器,⽬前主要需要mipsel-linux-gcc。
之前⼀直以为可以⽤apt-get install找到,结果找了好久找不到,发现还是得⾃⼰编。
主要是参考上⾯的那个链接,然后这对⾃⼰需求改了改配置。
1. 环境系统:Ubuntu 16.04软件: buildroot该软件可以编译⽤于 mips, arm等等的C编译器。
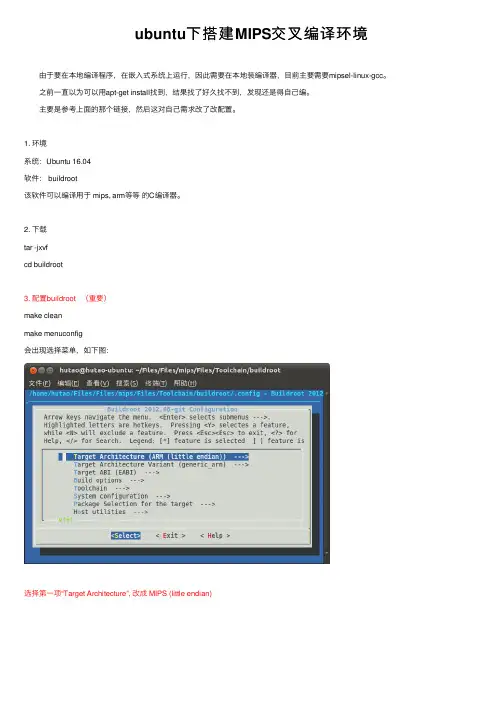
2. 下载tar -jxvfcd buildroot3. 配置buildroot (重要)make cleanmake menuconfig会出现选择菜单,如下图:选择第⼀项“Target Architecture”, 改成 MIPS (little endian)另外,选择“Toolchain”, 将"kernel headers"改成⾃⼰主机上的Linux版本(及运⾏改编译器的主机)可以在主机上通过 uname -r 或者 cat /proc/version查看。
原⽣的是只有gcc部分,没有g++部分,需要对编译C++程序,则在菜单⾥选择 Enable c++选项(按 y 选取)。
⽤于编译python的配置选项我主要⽤这个来编译python放在嵌⼊式设备系统上⽤,最开始就按照上⾯的选项,编译⼀般的程序没问题,编译python会出现:unknow type name 'wchar_t' 错误,这个需要在这⾥的⼯具⾥选⼏个选项;a1. 在配置⾥选择对wchar的⽀持;a2. 退出Target options,进⼊Target packages,在Target packages⾥再添加⼏个选项(这⾥我没看不配置这个会出什么问题,这个⾥⾯到底做什么的,我直接按照进⼊Interpreter lanaguages and scripting 选项,选择python选项,然后吧core python modules⾥的都选了吧~(编译⼀次太费时了,缺个什么⼜得重新编译这个⼯具链)配置完了后,保存,并退出。
使用cmake-gui交叉编译CMake是一个跨平台跨编译器的编译工具,它可以简化编译和构建过程。
CMake-GUI是一个基于图形界面的版本,它可以更直观地配置和构建项目。
下面是使用CMake-GUI进行交叉编译的步骤:1. 准备交叉编译环境。
为目标平台准备好交叉编译器,并安装好必要的依赖库,同时建议将交叉编译器路径添加到环境变量中。
2. 安装CMake-GUI。
在Windows下,CMake-GUI可以通过官方网站免费下载并安装。
在Linux下,可以通过包管理器安装,如Ubuntu下通过以下命令安装:```bashsudo apt-get install cmake-qt-gui```3. 创建工程目录。
在交叉编译环境中,创建一个新的项目目录。
使用CMake-GUI时,建议将源代码和构建目录分开存放,创建一个名为"build"的目录作为构建目录。
4. 配置项目。
双击运行CMake-GUI,并打开刚刚创建的工程目录。
在源代码目录和构建目录中分别选择所需的路径。
接着点击"Configure"按钮,选择交叉编译器平台,选择平台后,点击“Finish”按钮开始生成。
在点击"Configure"按钮前,需要注意:- 交叉编译器的路径在Windows和Linux下是不一样的,需要根据实际情况修改;- 如果需要添加自定义的编译选项,可以在"CMakeLists.txt"文件中添加。
5. 构建项目。
在CMake-GUI界面中,设置好编译选项,如编译类型、编译优化级别等。
然后点击"Generate"按钮,开始构建项目。
如果构建成功,我们可以在构建目录中看到生成的二进制可执行文件。
至此,我们使用CMake-GUI完成了交叉编译操作。
需要注意的是,交叉编译的过程可能因环境、依赖库等多种因素出现问题,需要根据具体情况进行调整。
![[转]qt-4.7交叉编译-mikit的专栏-CSDN博客](https://uimg.taocdn.com/53c5022a77c66137ee06eff9aef8941ea76e4b0d.webp)
[转]qt-4.7交叉编译-mikit的专栏-CSDN博客[转]qt-4.7交叉编译收藏一:环境介绍虚拟机:vmware 7.0Linux 环境:ubuntu 9.04交叉编译环境:arm-linux-g++ 3.4.5硬件平台:TQ2440二:移植步骤安装交叉编译环境由于这里使用的是QT2440管盘中提供的交叉编译工具链EABI-4.3.3_EmbedSky_20100610.tar.bz2,放在/opt/目录下解压主要是在解压后可以看到其中含有两个版本,由于qt4.7.0的编译必须使用3.4.5版本所以在设置交叉编译的路径的时候使用的是在/etc/profile中加入exportPATH=/opt/EmbedSky/crosstools_3.4.5_softfloat/gcc-3.4.5-glibc-2.3.6/arm-linux/bin:$PATH安装tslib1.41. 下载tslib1.4,解压2. 进入解压的目录运行执行./autogen.sh3. 执行./configure --prefix=/opt/tslib/ --host=arm-linux ac_cv_func_malloc_0_nonnull=yes ,经过一段时间的编译4. 执行make install5. 修改/opt/tslib/etc/ts.conf,把第二行的#号去掉(这样做的主要目的是为了在移植到板子上的时候,可以制定输入模块)6. 在/etc/profile中加入export PATH=/opt/tslib:$PATHPS:经过我的测试,我无法用以上的方法编译tslib1.4,我用的是另外一种方法:1、 ./autogen.sh #用于生成configure脚本2、 echo "ac_cv_func_malloc_0_nonnull=yes" >arm-linux.cache#产生一个cache文件arm-linux.cache,欺骗configure,3、 CC=arm-linux-gcc ./configure --host=arm-linux --prefix=/opt/tslib --cache-file=arm-linux.cache4、 make5、 make install交叉成功后在目标位置产生/bin、/etc、/include、/lib 4个文件夹编译qt4.7.0-arm1. 下载qt-everwhere-opensource-4.7.0,并解压最好重命名qt-everwhere-opensource-4.7.0-qte2. 开始进行配置选项./configure -embedded arm -release -opensource -fast -no-accessibility -no-scripttools -no-mmx -no-multimedia -no-svg -no-3dnow -no-sse -no-sse2 -silent -qt-libpng -qt-libjpeg -no-libmng -no-libtiff -no-multimedia -make libs -nomake tools -nomake examples -nomake docs -nomake demo -no-nis -no-cups -no-iconv -no-dbus -no-openssl -xplatform qws/linux-arm-g++ -little-endian -qt-freetype -depths 16,18 -qt-gfx-linuxfb -no-gfx-transformed -no-gfx-multiscreen -no-gfx-vnc -no-gfx-qvfb -qt-kbd-linuxinput -no-glib -qt-mouse-tslib -I /opt/tslib/include -L /opt/tslib/lib -confirm-license "$@"3. 开始进行交叉编译gmake 此过程要经历很长的一段时间4. 在交叉编译成功后运行gmake install安装,这里会默认安装到/usr/local/Trolltech/QtEmbedded-4.7.0-arm5. 这个时候qte的编译就成功了制作根文件系统(移植到开发板)1.移植tslib,将ubuntu中的/opt/tslib 拷贝到根文件系统中的/opt/下面2.移植qte4.7.0将/usr/local/Trolltech/QtEmbedded-4.7.0-arm下面的lib文件夹拷贝到根文件中的相同目录下(必需得先创建相应的目录)注:此时可以根据需要裁剪lib 中的内容去掉不用的.so文件3. 增加新的显示中文的字体wenquanyi 放到上面的/lib/fonts目录下。
qnx 交叉编译
QNX是一种实时操作系统,常常被用于开发嵌入式系统和工业控制设备。
要进行QNX交叉编译,可以按照以下步骤进行:
1.安装交叉编译环境:首先,需要在本地的机器上安装交叉编译环境。
这个环境通常
包括编译器、链接器和其他一些必要的工具。
2.配置目标系统:你需要配置目标系统,也就是你希望运行的设备。
这通常涉及到指
定设备的处理器架构、内存大小等参数。
3.创建交叉编译工具链:基于目标系统的配置,你可以创建一个交叉编译工具链。
这
个工具链包括一些特定的编译器、链接器和其他工具,它们都是针对目标系统的架构进行优化的。
4.编写代码并交叉编译:使用交叉编译工具链,你可以将你的源代码编译成目标系统
可以执行的二进制文件。
5.部署和测试:最后,你需要将编译后的二进制文件部署到目标系统上,并进行测试
以确保一切正常工作。
具体操作中,你需要根据你的设备和项目需求进行一些相应的调整和配置。
注意,由于QNX 的版本和具体硬件设备可能会影响交叉编译的过程,所以建议在实际操作前仔细阅读相关的文档和教程。


有关Xavier交叉编译环境那些事前⾔最近公司升级交叉编译环境,需要配置的⽬标机为Nvidia AGX xavier with Jetpack 4.5这⾥记录⼀些坑。
正⽂总体概要所谓cross-compile其实就是在amd64(下称host)上⽣成arm64(下称target)的binary明确⼀点,所有与编译相关的⼯具都是运⾏在本地,⽐如cmake⽐如aarch64-gcc⽐如tclsh版本为host⽽对应的rootfs可以简单理解为库,所有编译过程中需要的.so .a都会在rootfs⾥⾯找,版本为target⾄于cuda这种⽐较特殊的交叉编译,就需要host_bin(例如nvcc)+ target_lib(例如libcublas.so)进⾏配合莫慌,上述这些Nvidia SDK manager会提供下载。
前期准备从SDKmanager下载到的sample rootfs⾥⾯不含任何nv三⽅库,需要⾃⼰安装deb通过SDK manager可以下载对应型号的rootfs+三⽅库以及CUDA交叉环境,其中的json⽂件将指导每个deb的具体安装host这边安装好cmake, autoconf, automake, libtool, m4 and tclsh这些编译相关⼯具,准备好与target⼀致的aarch64-gcc-7.5仿真环境使⽤qemu对target环境进⾏模拟,对应命令sudo apt install qemu-user-static注意不要装错了⾄此host已经具备执⾏target bin的能⼒,直接chroot将报错failed to run command ‘/bin/bash’: No such file or directory复制对应的⽂件sudo cp /usr/bin/qemu-aarch64-static <rootfs>/usr/bin/有了这两步就可以chroot到target rootfs进⾏操作sudo chroot <rootfs> /bin/bash成功后使⽤uname -a检查架构是否为aarch64装依赖库理论上我们可以通过chroot + qemu的⽅式进⼊target rootfs进⾏包管理apt install ...但这样⽐较费时费⼒更糟糕的是,现阶段SDK manager刷机后半段会通过ssh访问Xavier安装⼀些在线内容,如此⼀来本地deb安装可能不全我个⼈建议使⽤sample_rootfs作为底包并从刷好的Xavier迁移/usr /lib /opt /etc进⾏覆盖升级完成后更新整个rootfs的符号链接为相对路径symlinks -cr /此举可避免编译过程中rootfs中的⽂件链接到host 效果如下:更新前<rootfs>/etc/resolv.conf -> /run/resolvconf/resolv.conf更新后<rootfs>/etc/resolv.conf -> ../run/resolvconf/resolv.conf打包技巧可以使⽤fakeroot替代sudo实现对rootfs的去权限打包,解压也不再需要root权限。
交叉编译环境的配置与使用交叉编译是指在一个不同的开发环境中编译程序,以在目标平台上运行。
目标平台可以是不同的硬件架构、操作系统或操作系统版本。
交叉编译可以有效地减少在目标平台上进行开发和测试的时间,尤其是在限制了资源的嵌入式系统中。
配置交叉编译环境的步骤主要包括以下几个方面:1. 选择交叉编译工具链:交叉编译工具链是包含了交叉编译器、交叉链接器和相关工具的集合。
根据目标平台的特点,可以选择使用已有的工具链,或者自己构建定制的交叉编译工具链。
常见的交叉编译工具链有Cygwin、GCC等。
3.配置交叉编译环境:在配置交叉编译环境之前,首先需要确定目标平台和目标操作系统的相关信息,例如:处理器架构、操作系统版本、库文件位置等。
然后设置环境变量,包括设置交叉编译工具链的路径、目标平台和操作系统的相关信息。
4. 编写和编译代码:在配置好交叉编译环境后,可以使用常规的编程工具,如IDE或命令行工具,编写程序代码。
在编译时,需要使用交叉编译工具链中的编译器和相关工具来进行编译。
例如,使用交叉编译工具链中的gcc来代替本机的gcc进行编译。
5.链接和生成目标文件:编译成功后,会生成目标文件,即在目标平台上可以运行的可执行文件或库文件。
在链接时,需要使用交叉链接器来链接目标文件和相关库文件。
6.在目标平台上运行:将生成的目标文件复制到目标平台上,并通过目标平台的方式运行。
例如,在嵌入式系统中,可以通过串口或其他方式加载程序并运行。
1.确定目标平台和操作系统的要求:在进行交叉编译之前,需要确保了解目标平台和操作系统的相关要求,例如处理器架构、操作系统版本、库文件位置等。
这些信息将有助于选择合适的交叉编译工具链和配置交叉编译环境。
2.编写适用于目标平台的代码:在进行交叉编译时,需要注意编写适用于目标平台的代码。
例如,需要避免使用与目标平台不兼容的库函数和系统调用,以及考虑目标平台的资源限制等。
3.调试和测试:由于交叉编译环境和目标平台的不同,可能会遇到一些问题,如编译错误、链接错误或运行错误等。
一、实验目的本次实验旨在通过交叉编译,了解并掌握交叉编译的基本原理和操作方法,提高在嵌入式系统开发中对编译器配置和编译过程的掌握能力。
交叉编译是指在一个平台上编译生成可在另一个平台上运行的程序,这对于嵌入式系统开发尤为重要,因为嵌入式设备通常资源有限,而开发环境与运行环境可能不同。
二、实验环境1. 主机平台:Windows 102. 目标平台:Linux(假设为Raspberry Pi)3. 编译工具:GCC4. 软件包:交叉编译工具链(如交叉工具链crosstool-ng)三、实验步骤1. 安装交叉编译工具链(1)在主机上安装crosstool-ng。
```bashsudo apt-get install crosstool-ng```(2)使用crosstool-ng生成交叉编译工具链。
```bashcrosstool-NG-1.22.0/src/crosstool-NG-1.22.0/configure --toolchain-build=x86_64-build --toolchain-target=arm-linux-gnueabihf --sysroot=/path/to/raspberry-pi/rootfsmake```(3)安装交叉编译工具链。
```bashsudo make install```2. 编写测试程序(1)创建一个简单的C程序,如`hello_world.c`。
```c#include <stdio.h>int main() {printf("Hello, World!\n");return 0;}```3. 交叉编译程序(1)使用交叉编译器编译程序。
```basharm-linux-gnueabihf-gcc hello_world.c -o hello_world ```(2)检查编译生成的可执行文件。
```bashls -l hello_world```4. 将可执行文件传输到目标平台(1)使用SSH将可执行文件传输到目标平台。
Windows平台下建立RTEMS交叉编译环境步骤:一、安装MSYS-1.0.10(或者更高版本)1、将MSYS安装到c:/msys目录下;2、将C:/opt/rtems-4.10-mingw添加到msys环境变量中;(1)、修改c:/msys/etc/目录下的fstab文件。
添加C:/opt/rtems-4.10-mingw /opt/rtems-4.10-mingw(2)、在MSYS shell中输入:export PATH=/opt/rtems-4.10-mingw/bin:$PATH二、安装MSYS-DTK-1.0.1到c:/msys/1.0目录下;三、将sparc-rtems-4.10-gcc-4.4.x-1.2x-mingw.zip解压到C:/opt/rtems-4.10-mingw,修改windows环境变量,将c:/opt/rtems-4.10-mingw/bin添加到windows系统环境变量PATH 中。
四、安装autoconf-2.68和automake-1.11.1$ mkdir /src$ cd /src<… download autoconf and automake to /src…>$ tar –zxf autoconf-2.68.tar.bz2$ mkdir autoconf-2.68/build$ cd autoconf-2.68/build$ ../configure –prefix=/usr$ make$ make install< …autoconf-2.68 has been installed…>$cd /src$ tar –zxf automake-1.11.1.tar.bz2$ mkdir automake-1.11.1/build$ cd automake-1.11.1/build$ ../configure –prefix=/usr$ make$ make install<… automake-1.11.1 has been installed…>$ exit五、从源代码安装RTEMS1、将源代码rtems-4.10复制到c:/opt/rtems-4.10-mingw/src目录下;2、利用msys shell进入c:/opt/rtems-4.10-mingw/src目录;make bootstrapmake configuremake compilemake intstallmakefile文件内容见附件六、编译helloworldsparc-rtems-gcc -g -O2 rtems-hello.c -o rtems-helloLinux平台下建立RTEMS交叉编译环境步骤:一、下载所需的文件.rpm package二、安装所有文件到/opt/rtems-4.10/bin目录下。
gcc linaro 交叉编译好的,以下是一篇关于gcc linaro交叉编译的文档,希望能够帮助到您:交叉编译是一种在一种架构上编译出适用于另一种架构的程序的技术。
在嵌入式系统开发、软件移植等领域中,交叉编译是非常重要的一项技能。
Linaro是一个由许多不同厂商支持的开源组织,它致力于简化麒麟操作系统(麒麟是用于基于Linux的系统的一套容器和包管理器)的开发和构建过程。
在本篇文章中,我们将介绍如何在Linaro环境下使用gcc进行交叉编译。
一、准备工作1. 安装Linaro环境:首先,您需要安装Linaro环境,以便能够编译适用于其他架构的程序。
2. 确定目标架构:在进行交叉编译之前,您需要确定目标架构(如x86、ARM等)。
3. 安装交叉编译工具链:根据目标架构,您需要安装相应的交叉编译工具链。
二、交叉编译步骤1. 编写代码:使用适用于目标架构的编程语言编写代码。
2. 配置环境变量:确保编译器、头文件等路径被正确添加到环境变量中。
3. 编译代码:使用gcc等交叉编译工具编译代码。
例如,对于ARM架构,可以使用以下命令进行编译:`arm-linaro-gcc -ooutput_file input_file`。
4. 生成可执行文件:编译成功后,生成适用于目标架构的可执行文件。
三、注意事项1. 确保目标架构与工具链匹配:在进行交叉编译时,确保目标架构与所使用的交叉编译工具链相匹配。
2. 调试信息:如果您需要调试生成的程序,请确保在编译时启用调试信息。
3. 链接库:如果您的程序需要链接库文件,请确保已正确安装并链接到目标架构的库文件。
四、实践案例下面是一个简单的实践案例,演示如何在Linaro环境下使用gcc 进行交叉编译:1. 编写一个简单的C程序(例如hello_world.c),并在终端中打开该文件。
2. 使用以下命令进行编译:`arm-linaro-gcc -o hello_world hello_world.c`。
linux交叉编译环境搭建步骤正文:在进行Linux交叉编译之前,我们需要先搭建好相应的交叉编译环境。
下面是搭建步骤的详细说明:步骤一:安装必要的软件包首先,我们需要安装一些必要的软件包,包括GCC、binutils、glibc 以及交叉编译工具链等。
可以通过包管理器来安装这些软件包,比如在Ubuntu上可以使用apt-get命令,CentOS上可以使用yum命令。
步骤二:下载交叉编译工具链接下来,我们需要下载相应的交叉编译工具链。
可以从官方网站上下载已经编译好的工具链,也可以通过源码自行编译得到。
下载好之后,将工具链解压到一个目录下。
步骤三:配置环境变量为了方便使用交叉编译工具链,我们需要将其添加到系统的环境变量中。
可以通过编辑.bashrc文件来实现,添加类似下面的内容:```shellexport CROSS_COMPILE=/path/to/cross-compiler/bin/arm-linux-export ARCH=arm```其中,/path/to/cross-compiler是你下载的交叉编译工具链的路径。
步骤四:测试交叉编译环境在配置好环境变量之后,我们可以通过简单的测试来验证交叉编译环境是否搭建成功。
比如,可以尝试编译一个简单的Hello World程序,并在目标平台上运行。
步骤五:编译其他软件当交叉编译环境搭建成功,并且测试通过之后,我们就可以使用这个环境来编译其他的软件了。
比如,可以使用交叉编译工具链来编译Linux内核、U-Boot引导程序、驱动程序等。
总结:搭建Linux交叉编译环境是进行嵌入式开发的基础工作之一。
在搭建好环境之后,我们可以使用交叉编译工具链来编译适配于目标平台的软件,从而实现在开发主机上进行开发和调试的目的。
交叉编译环境搭建环境准备:Linux系统,gcc-4.9.3-64-gnu.tar.gz,openssl-1.0.2k.tar.gz1、搭建mips64el-linux-gcc环境(1)在/opt⽬录解压 gcc-4.9.3-64-gnu.tar.gz,把对应的 /opt/gcc-4.9.3-64-gnu/bin ⽬录添加到环境变量;(2)编辑/etc/profile⽂件,在最后添加export PATH=/opt/gcc-4.9.3-64-gnu/bin:$PATH(3)使⽤source /etc/profile⽴即⽣效2、通过mips64el-linux-gcc编译,安装openssl(1)解压openssl-1.0.2k.tar.gz,进⼊解压后的⽬录openssl-1.0.2k(2)暂时把环境变量换成mips gcc的,重启就会失效,这样不需要去Makefile⽂件修改了export CC=/opt/gcc-4.9.3-64-gnu/bin/mips64el-linux-gccexport CPP=/opt/gcc-4.9.3-64-gnu/bin/mips64el-linux-g++export AR=/opt/gcc-4.9.3-64-gnu/bin/mips64el-linux-arexport LD=/opt/gcc-4.9.3-64-gnu/bin/mips64el-linux-ldexport RANLIB=/opt/gcc-4.9.3-64-gnu/bin/mips64el-linux-ranlib(3)指定安装⽬录:./config no-asm shared --prefix=/usr/local/mips3、修改OpenSSL的Makefile⽂件(1)修改Makefile,查找全⽂删掉 -m64 关键字(2)修改以下配置#SHLIB_MAJOR=1#SHLIB_MINOR=0.0SHLIB_MAJOR=10SHLIB_MINOR=(3)去掉中间的点#SHLIB_EXT=.so.$(SHLIB_MAJOR).$(SHLIB_MINOR)SHLIB_EXT=.so.$(SHLIB_MAJOR)$(SHLIB_MINOR)这种修改的地⽅在本⽂件还有两处,找到之后去掉中间的点‘.’即可,如图所⽰:4、编译安装然后执⾏ make 进⾏编译,如图成功后可看到在当前⽬录⽣成了libcrypto.so库执⾏ make install 安装即可5、修改程序⾥的 Makefile修改⾃⼰代码⾥边的 Makefile ⽂件,主要是添加头⽂件和库头⽂件/usr/local/mips/include 和库 /usr/local/mips/lib 且视他⼈之凝⽬如盏盏⿁⽕,⼤胆地去⾛⾃⼰的路。
make交叉编译参数在使用make进行交叉编译时,可以通过以下参数来设置交叉编译环境:1. CC,指定交叉编译器的路径和名称。
例如,CC=arm-linux-gcc 表示使用arm-linux-gcc作为交叉编译器。
2. CXX,指定交叉编译器的路径和名称(用于C++代码)。
例如,CXX=arm-linux-g++ 表示使用arm-linux-g++作为交叉编译器。
3. AR,指定交叉编译环境中的静态库归档工具。
例如,AR=arm-linux-ar 表示使用arm-linux-ar作为静态库归档工具。
4. LD,指定交叉编译环境中的链接器。
例如,LD=arm-linux-ld 表示使用arm-linux-ld作为链接器。
5. CROSS_COMPILE,设置交叉编译器的前缀。
例如,CROSS_COMPILE=arm-linux表示交叉编译器的前缀为arm-linux-。
6. ARCH,指定目标架构。
例如,ARCH=arm 表示目标架构为ARM。
7. SYSROOT,指定交叉编译环境的根目录。
例如,SYSROOT=/path/to/sysroot 表示交叉编译环境的根目录为/path/to/sysroot。
8. CFLAGS,设置编译选项。
可以通过CFLAGS参数传递特定的编译选项,如优化级别、宏定义等。
9. LDFLAGS,设置链接选项。
可以通过LDFLAGS参数传递特定的链接选项,如库路径、库名称等。
使用这些参数,你可以根据具体的交叉编译环境进行设置,确保make能够正确地进行交叉编译。
记住,在设置这些参数时,要根据实际情况替换为你所使用的交叉编译工具链的路径和名称。