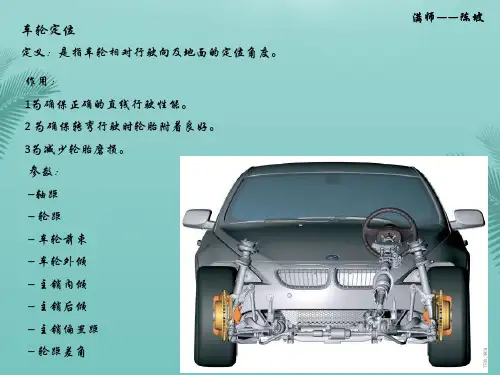
车轮定位参数及其作用
- 格式:ppt
- 大小:2.08 MB
- 文档页数:12
转向轮定位的四个参数转向轮定位是指利用传感器检测转向轮的运动情况来定位车辆行驶位置的一种技术手段。
这种技术在汽车制造中应用广泛,目前已经成为汽车零部件中不可缺少的一环。
在实际应用中,转向轮定位的准确性及精度直接影响到车辆行驶的安全性和舒适性。
本文旨在介绍转向轮定位的四个参数及其原理,帮助读者了解和掌握相关车辆定位技术。
一、滚动半径转向轮的滚动半径是指车辆行驶过程中转向轮的有效半径,即由于胎面摩擦而产生的滚动半径。
滚动半径是影响车轮转速的重要因素,它直接影响到车辆定位的准确性。
传感器检测到转向轮的滚动半径后,可以根据行驶距离和转动角度计算出车辆的行驶轨迹,从而确定车辆的位置信息。
二、侧滑角度侧滑角度是指车辆前轮和车身方向之间的夹角。
一般而言,正常行驶中车辆的前轮与车身方向应该基本重合,否则就会产生侧滑现象。
侧滑现象严重时会影响车辆行驶的稳定性和安全性。
因此,准确检测侧滑角度对于保证车辆行驶的稳定性和安全性至关重要。
三、转向角度转向角度是指车辆前轮与车身方向的夹角,一般用来控制车辆前轮的转向。
传感器可以准确测量转向角度,从而对车辆的转向情况进行判断。
通过转向角度的检测,可以实现精确的行驶控制和方向调整,从而使车辆行驶更加平稳和安全。
四、角速度角速度是指车辆转向轮绕其轴线所转动的速度。
由于车辆在行驶过程中转向轮的角速度非常灵敏,因此将角速度作为车辆定位的参数可以提高定位精度和稳定性。
当车辆定位下降时,传感器会通过检测转向轮的角速度来进行调整,保证车辆行驶路径的准确性和稳定性。
总之,转向轮定位技术是一种重要的车辆定位技术,它可以通过检测转向轮的四个参数,即滚动半径、侧滑角度、转向角度和角速度等,实现对车辆行驶路线的准确判断和控制。
通过合理应用这些参数,可以提高车辆行驶的安全性和稳定性,提高行驶的舒适性和便捷性。
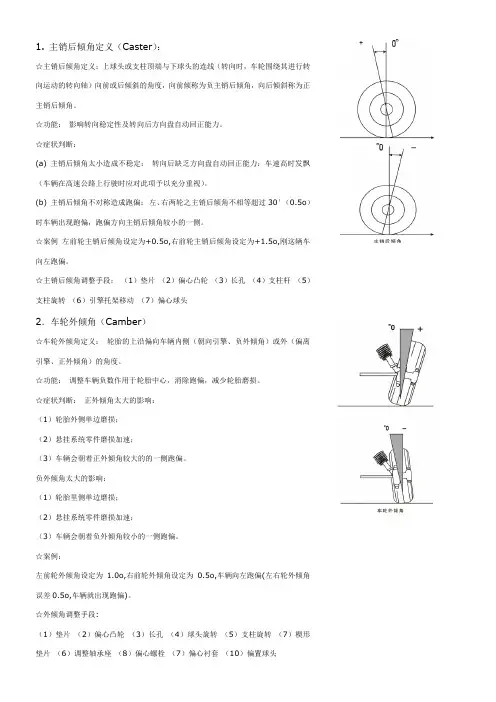
1. 主销后倾角定义(Caster):☆主销后倾角定义:上球头或支柱顶端与下球头的连线(转向时,车轮围绕其进行转向运动的转向轴)向前或后倾斜的角度,向前倾称为负主销后倾角,向后倾斜称为正主销后倾角。
☆功能:影响转向稳定性及转向后方向盘自动回正能力。
☆症状判断:(a) 主销后倾角太小造成不稳定:转向后缺乏方向盘自动回正能力:车速高时发飘(车辆在高速公路上行驶时应对此项予以充分重视)。
(b) 主销后倾角不对称造成跑偏:左、右两轮之主销后倾角不相等超过30′(0.5o)时车辆出现跑偏,跑偏方向主销后倾角较小的一侧。
☆案例左前轮主销后倾角设定为+0.5o,右前轮主销后倾角设定为+1.5o,刚这辆车向左跑偏。
☆主销后倾角调整手段:(1)垫片(2)偏心凸轮(3)长孔(4)支柱杆(5)支柱旋转(6)引擎托架移动(7)偏心球头2.车轮外倾角(Camber)☆车轮外倾角定义:轮胎的上沿偏向车辆内侧(朝向引擎、负外倾角)或外(偏离引擎、正外倾角)的角度。
☆功能:调整车辆负数作用于轮胎中心,消除跑偏,减少轮胎磨损。
☆症状判断:正外倾角太大的影响:(1)轮胎外侧单边磨损;(2)悬挂系统零件磨损加速;(3)车辆会朝着正外倾角较大的的一侧跑偏。
负外倾角太大的影响:(1)轮胎里侧单边磨损;(2)悬挂系统零件磨损加速;(3)车辆会朝着负外倾角较小的一侧跑偏。
☆案例:左前轮外倾角设定为 1.0o,右前轮外倾角设定为0.5o,车辆向左跑偏(左右轮外倾角误差0.5o,车辆就出现跑偏)。
☆外倾角调整手段:(1)垫片(2)偏心凸轮(3)长孔(4)球头旋转(5)支柱旋转(7)楔形垫片(6)调整轴承座(8)偏心螺栓(7)偏心衬套(10)偏置球头3.前束角(Toe)☆前束角的定义: 从车辆的前方看,于两轮轴高度相同处测量左、右轮胎中心线之间的距离,车辆前端距离与后端距离差值称为前束角。
前端距离大于后端距离为负前束,反之为正前束。
相等为零前束。
方程式赛车四轮定位参数方程式赛车四轮定位参数是指用于描述赛车四个车轮在赛道上的位置和姿态的参数。
它们是赛车动力学模型中的重要参数,对于车辆的操控和性能表现具有重要的影响。
在赛车设计和调校中,准确地确定和调整四轮定位参数能够提高赛车的操控性能和稳定性。
四轮定位参数主要包括前束、后束、前撇距、后撇距、前轮倾角、后轮倾角、前轮距、后轮距等几个方面。
前束是指前轮轮毂中心线与车辆纵向中心线之间的距离差。
它主要影响车辆的转向性能和操控稳定性。
适当调整前束能够改变车辆的转向灵活性和抓地力,提高车辆的操控性能。
后束是指后轮轮毂中心线与车辆纵向中心线之间的距离差。
它主要影响车辆的稳定性和后轮抓地力。
适当调整后束能够改变车辆的稳定性和后轮抓地力分布,提高车辆的操控性能和稳定性。
前撇距是指前轮轮毂中心线与车辆纵向中心线的交点到前轮胎接地面中心线的距离差。
它主要影响车辆的转向性能和操控稳定性。
适当调整前撇距能够改变车辆的转向灵活性和抓地力,提高车辆的操控性能。
后撇距是指后轮轮毂中心线与车辆纵向中心线的交点到后轮胎接地面中心线的距离差。
它主要影响车辆的稳定性和后轮抓地力。
适当调整后撇距能够改变车辆的稳定性和后轮抓地力分布,提高车辆的操控性能和稳定性。
前轮倾角是指前轮垂直于赛道面的倾斜角度。
它主要影响车辆的转向性能和悬挂系统的工作状态。
适当调整前轮倾角能够改变车辆的转向灵活性和悬挂系统的工作特性,提高车辆的操控性能。
后轮倾角是指后轮垂直于赛道面的倾斜角度。
它主要影响车辆的稳定性和悬挂系统的工作状态。
适当调整后轮倾角能够改变车辆的稳定性和悬挂系统的工作特性,提高车辆的操控性能和稳定性。
前轮距是指前轮轮毂中心线之间的距离。
它主要影响车辆的转向性能和操控稳定性。
适当调整前轮距能够改变车辆的转向灵活性和抓地力,提高车辆的操控性能。
后轮距是指后轮轮毂中心线之间的距离。
它主要影响车辆的稳定性和后轮抓地力。
适当调整后轮距能够改变车辆的稳定性和后轮抓地力分布,提高车辆的操控性能和稳定性。
四轮定位的四个参数
四轮定位的四个参数是车轮的前后左右位置,这些参数对于汽车行驶的稳定性和安全性起着至关重要的作用。
第一个参数是前后轴距,即前轮和后轮轴心之间的距离。
前后轴距的大小直接影响汽车的转向稳定性和通过障碍物的能力。
一般来说,轴距较长的汽车转向相对来说会更加平稳,通过障碍物的能力也更强。
第二个参数是前后轮距,即左、右前轮与左、右后轮轮心之间的距离差。
前后轮距的大小对于汽车的操控性和稳定性有着较大的影响。
前后轮距较大的汽车操控性相对来说更稳定,但是容易出现过度转向。
第三个参数是前后轮胎间的距离,即左、右前轮和左、右后轮之间的距离。
这个参数对于汽车的平稳性和转弯稳定性有着重要的影响。
轮胎间距较大的汽车在行驶过程中相对来说更加平稳,但是转弯时会出现较大的滑移。
第四个参数是左右轮距,即左、右前轮和左、右后轮之间的距离差。
左右轮距的大小对于汽车的平衡性和横向稳定性有着较大的影响。
左右轮距较大的汽车在行驶过程中相对来说更加平衡,但是在转弯时容易出现侧翻等危险情况。
以上四个参数的大小都会对汽车的操控性、稳定性、平衡性和安全性产生影响。
因此,在进行汽车定位时,需要准确测量这些参数,以保证汽车行驶的稳定性和安全性。
车轮定位的四个参数
车轮定位是当前自动驾驶具有重要意义的一项技术,即它可以使车辆自主完成定位、导航和避障行为。
它的基本原理是通过分析车轮上的四个定位参数,估算和理解车辆的运动状态,以制定出合适的行为以实现自主驾驶。
这四个定位参数分别是:
一、车辆距离:即车辆在水平面内沿行驶方向行进了多少距离。
对于临时定位,汽车可以采用GPS定位系统,并将前述距离信息与GPS 系统各定位信息结合,记录历史车辆行驶路径,进而计算车辆行驶距离。
在车轮定位中,当汽车行驶距离较短时,可以采用车轮编码器来模拟GPS,根据车轮行驶时间、转速、齿数等参数计算出车辆的行驶距离。
二、车辆速度:指车辆沿行驶方向的运动速度,这一参数则可以根据车轮编码器的输出转速来确定,车轮编码器会根据车轮带动的物体在车轮上的转动次数来确定车辆行驶的速度,进而确定车辆运动方向和它的行驶速度。
三、车辆航向:即指车辆行进的方向,它是通过车辆行驶方向来确定的。
由于方向信号是一个复杂的数学模型,所以通常会采用磁力计来提供方向信号。
磁力计的原理是通过测量地磁场bs值,可以换算成车辆行驶方向的角度,从而确定车辆正负度,方向等相关参数。
四、车辆位置:即汽车行驶的位置,这一参数也可以通过GPS定位技术来推定,但随着GPS技术的逐步发展,也可以通过超声波、激光雷达、传感器等技术来实现定位,汽车定位信息的准确度也将更加高效准确。
综上所述,车轮定位的四个定位参数包括车辆距离、车辆速度、车辆航向和车辆位置。
通过以上四个参数的测量和计算,将可以对车辆的运动状态进行估计和定位,进而实现自动驾驶的一些典型行为。

四轮定位基本参数及其影响四轮定位仪作为一种检测仪器,成为汽车维修工作中必不可少的维修设备。
四轮定位的主要定位参数包括:前束角、外倾角、主销内倾角、主销后倾角。
定位参数对于汽车的操控性、安全性以及耗油量等有重大影响。
是现代轿车维护、维修的重要项目标签:四轮定位;底盘参数;车辆工程0 引言四轮定位已经成为发达国家车辆年检的主要参数之一,和制动、排放一样,四轮定位的参数直接决定了车辆是否能在路上充分发挥性能保证安全性。
因此,长期使用的车辆需每半年进行一次定位,如果遇到事故则在维修后马上需进行定位。
四轮定位的主要参数有外倾角、前束角、主销后倾角、主销内倾角、包容角和摩擦半径。
除此之外,影响定位性能的还有推理角、转向前展、车轴偏角和行驶高度。
一般来说,最常见的麦弗逊悬挂只有前轮前束是原生可调的,也是影响性能最直观的因素。
前轮和后轮的外倾、主销后倾和主销内倾可以通过加装调整臂等方式进行调整,因此,本文着重介绍上述参数。
1 外倾角车轮外倾角(camber angle)是指车轮中心平面和地面铅垂线形成的夹角。
车轮顶部向外倾斜时,车轮中心线在铅垂线外侧,这样的倾角称之为正外倾角(positive camber)。
车轮顶部向内倾斜时,车轮中心线在铅垂线内侧,这样的倾角为负外倾角(negative camber)。
当车轮中心线与铅垂线重合时,为零外倾角。
正外倾角的主要作用有四个方面:一是由于汽车自重和载重,会产生不需要的负外倾角,导致车轮与地面呈一定夹角,磨损轮胎,在货运车辆上,这种负外倾角会加剧轴承和衬套的不平衡压力,降低其耐用性能。
二是一定的正外倾角可以减小转向所需的操纵力,使转向更为灵活轻便。
三是减轻轮毂轴承负荷,防止车轮有脱滑趋势,一定的正外倾角可以使路面的反向作用力产生一个沿车轴线向内的分力,有助于防止车轮长期有向外脱滑的趋势导致外轴承和轴头螺母压力过大。
四是正外倾角还可以降低转向节负荷,防止转向节过早变形。