激光雷达成像技术(3)
- 格式:ppt
- 大小:9.70 MB
- 文档页数:64
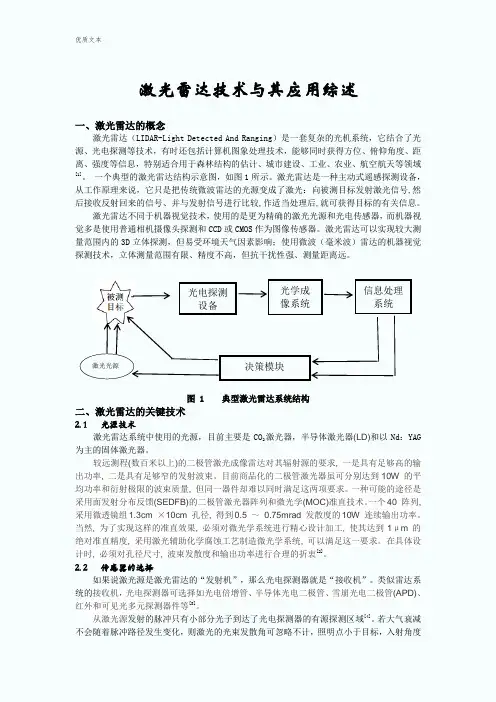
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。

激光雷达成像原理
激光雷达成像技术是一种以激光束作为被测物体的能量源来检
测物体的一种测量技术,它主要利用激光束照射被测物体,检测反射回来的激光束,以及返回激光束的外观、振动、位置等信息来分析物体的状态,从而获得物体的信息。
激光雷达成像技术是一种无接触式的检测方式,它不需要用户触碰物体也能够准确测量物体及其特征,这是与传统测量方式最大的区别。
此外,激光雷达还具有成本低、快速、精确度高等特点。
激光雷达成像的基本原理是:发出的激光束照射到被测物体的表面,表面反射的激光束会被接收器检测到,并且无论是位置、振动信息,还是外观信息等,也都会被检测到,从而得到物体的详细信息。
接收器接收到的激光信号可以用来判断被测对象的位置、大小、形状等特征,还可以用来识别物体是否有变形等。
激光雷达成像技术可以用在许多不同的领域,比如工业生产线的质量检测、机器人抓取、安防监控系统、自动驾驶系统、运动控制系统等。
例如在机器人抓取时,激光雷达成像技术可以有效提高机器人的抓取精度,从而使其能更快速、准确地完成抓取任务;在安防监控中,激光雷达的指纹识别技术可以用来有效地检测并识别出被检测物体的指纹和表面特征,从而实现更准确的安防监控;在自动驾驶系统中,激光雷达成像技术可以用来准确测量周围环境和物体的距离,以实现对自动驾驶车辆的识别和定位。
总之,激光雷达成像技术是一种具有革命性意义的技术,它已经
被广泛应用于许多不同的领域,从简单的安全检测到更复杂的运动控制系统,激光雷达的应用场景非常广泛,具有极大的发展潜力。
DEM数据获取方法资料DEM(Digital Elevation Model)数字高程模型是通过测量和计算地球表面的高程数据而生成的一种地形表面的模型。
DEM数据广泛应用于地形分析、地貌与水文模拟、三维可视化、地球科学研究、环境规划等领域。
获取DEM数据的方法主要有空间遥感技术、测绘技术和数值高程模型。
一、空间遥感技术获取DEM数据1.激光雷达(LiDAR)技术:激光雷达技术通过激光的脉冲反射来测量地表的高程,能够高精度地获取地形数据。
激光雷达设备搭载在航空器或地面车辆上,通过扫描地面并记录雷达返回的信号,高效地获取大面积DEM数据。
2.雷达干涉(InSAR)技术:雷达干涉技术利用合成孔径雷达成像来测量地表的形变和高程变化。
通过使用两个或多个雷达图像,可以计算地表的高程信息,并生成DEM数据。
这种技术可以应用于大面积的地表变形监测和地形测量。
3.卫星测高:卫星测高技术通过卫星载荷接收和处理地表的雷达回波信号,测量地表的高程,并生成高精度DEM数据。
这种方法适用于获取大范围的DEM数据,但精度相对较低。
二、测绘技术获取DEM数据1.地面测量:地面测量是通过在地面上放置测量仪器,通过测量角度、距离和高程来获取地表的高程信息。
常见的地面测量方法包括全站仪、GPS测量等,可以获取高精度的局部DEM数据。
2.摄影测量:摄影测量是通过航空或航天平台上的相机拍摄地面的图像,并通过图像处理和测量方法来推算地表的高程信息。
该方法适用于中等精度的大范围DEM数据获取。
3.地形测绘:地形测绘是通过现场勘测和测量获取地形数据,包括通过地形测图、地形描图和地形探测来获得地表高程数据。
这种方法适用于小范围和高精度的DEM数据获取。
三、数值高程模型获取DEM数据1.数学建模:数学建模是通过现有地表高程数据进行数学建模和插值方法来推算出没有测量点的地表高程数据。
常用的数学建模方法包括三角网格插值、反距离权重插值等,可以较好地还原地表的高程。
成像激光雷达技术概述想象一下,一辆无人驾驶汽车在繁忙的都市中自由穿梭,智能地避让行人、车辆,准确地判断路况,安全地到达目的地。
这一切都离不开一种神秘的技术——成像激光雷达技术。
成像激光雷达技术是一种通过发射激光并接收反射信号,快速获取目标物体详细信息的技术。
它具有高精度、高速度、高分辨率等优点,成为无人驾驶、智能交通等领域的关键技术之一。
成像激光雷达技术的原理可以归结为“激光雷达扫描”。
首先,激光发射器会发射出一定波长的激光束,光束经过光学系统后,会形成一定的光路。
随后,激光束打到目标物体上,并反射回来。
反射信号被接收器捕获后,通过高速数据处理器进行处理,最终形成具有高清晰度的三维图像。
成像激光雷达技术具有以下特点:1、精度高:激光雷达的测量精度远高于传统的传感器,能够清晰地识别出目标物体的形状、大小和距离等信息。
2、速度快:激光雷达的扫描速度非常快,能够在短时间内获取大量数据,从而实时更新目标物体的位置和姿态。
3、成本适中:相较于其他高级传感器,成像激光雷达技术的成本较为适中,适合大规模应用和推广。
4、抗干扰性强:激光雷达的信号为定向光束,不易受到环境光的干扰,保证了测量的稳定性和准确性。
成像激光雷达技术在各类应用场景中都有着广泛的实际应用。
在智能交通领域,成像激光雷达技术能够实时监测道路状况、车辆流量等信息,为智能交通管理系统提供重要依据。
在无人驾驶领域,成像激光雷达技术可以帮助车辆进行精确的障碍物识别、路径规划以及自主导航,提高无人驾驶的安全性和可靠性。
此外,成像激光雷达技术在无人机、机器人等领域也有着广泛的应用,能够实现自主导航、环境感知等功能。
未来,成像激光雷达技术将继续发挥其重要作用。
随着技术的不断进步,激光雷达的扫描速度、分辨率和可靠性等方面将得到进一步提升。
随着5G、物联网等技术的快速发展,成像激光雷达技术将在更广泛的领域得到应用,例如智慧城市、安全监控等。
此外,随着和机器学习等技术的不断发展,成像激光雷达技术将能够实现更高级别的自动化和智能化。
dtof和itof成像原理DTOF(Direct Time of Flight)和ITOF(Indirect Time of Flight)是两种常见的激光雷达成像原理。
它们都是利用激光束在目标表面上的反射来测量距离的技术。
下面我将从多个角度来解释它们的成像原理。
首先,我们来看DTOF成像原理。
DTOF技术通过测量激光脉冲从发射到接收所需的时间来计算目标物体的距离。
当激光脉冲被发射后,它会照射到目标表面上并被反射回来。
接收器会记录激光脉冲的返回时间,并根据光速和时间来计算出目标物体的距离。
这种方法可以实现高精度的距离测量,因为它直接测量了激光脉冲的往返时间。
接下来是ITOF成像原理。
ITOF技术则是通过测量激光脉冲的相位变化来计算目标物体的距离。
在ITOF系统中,激光脉冲被发射并照射到目标表面上,然后被反射回来。
接收器会记录激光脉冲的相位变化,并根据相位变化来计算出目标物体的距离。
相较于DTOF,ITOF技术可以实现更快的测量速度和更高的分辨率,因为它利用了激光波的相位信息。
除了以上两种成像原理,还有其他一些技术也可以用于激光雷达成像,比如混合式的技术。
在混合式系统中,DTOF和ITOF技术可以结合使用,以充分利用它们各自的优势,从而实现更精准和高效的距离测量。
总的来说,DTOF和ITOF都是基于激光脉冲往返时间或相位变化来实现距离测量的技术。
它们在实际应用中有着各自的优势和局限性,选择合适的技术取决于具体的应用场景和需求。
希望以上解释能够全面地回答你关于DTOF和ITOF成像原理的问题。

激光成像技术的发展和应用随着科技的不断发展,激光成像技术已经逐渐成为了一个热门的话题。
这种技术基于激光器的原理,利用激光束来反射图像,并进行计算分析。
在现代的许多领域中,激光成像技术都得到了广泛的应用。
未来,随着科技的不断进步,现有的激光成像技术将会得到更加完善,甚至会出现全新的技术,从而引领行业不断地发展。
一、激光成像技术的分类激光成像技术包含了许多不同的种类。
根据激光光源和成像方式的不同,可以将它们划分为以下四类:激光雷达成像技术、光学显微镜成像技术、基于空间和功率的激光成像技术以及太赫兹波成像技术。
激光雷达成像技术是一种从外部获取3D空间数据的技术。
它利用激光束发射并照射到物体表面,然后通过测量激光束的回波时间来计算出物体的距离信息和形状信息。
光学显微镜成像技术则是用来观察非常微小的生物分子和细胞的一种技术。
它基于激光束穿透样品并打印到接收器上的原理来获取高清晰度的图像。
基于和空间和功率的激光成像技术可以分为两个子类。
其中基于空间的技术利用激光束形成各种空间模式,用于变换成像策略或者信息编码方案。
而基于功率的技术则是利用激光的高能量来击碎物质样本,然后再通过分析产生的碎片来获得图像。
最后,太赫兹波成像技术则是利用太赫兹波辐射和探测器来获取特定物质样品的图像。
这种技术通常用于材料分析、非接触安检或者医学成像。
二、激光成像技术的应用激光成像技术在现代的许多领域中都得到了广泛的应用。
下面列出其中的一些:1. 农业随着农业技术不断地发展,激光成像技术开始在这个领域中发挥作用。
农业机器人可以利用激光雷达进行土地测绘和作物分析,以提高农作物的种植质量和生产效率。
2. 医学激光成像技术在医学成像中也得到了广泛的应用。
例如,光学显微镜成像技术可以用于定量分析某些生物结构,帮助确定疾病的程度。
此外,激光雷达在眼科和普通外科手术中也发挥了重要作用。
利用激光以极高的精度和控制度切除病变组织并促进伤口愈合速度。
3. 地质勘探基于空间和功率的激光成像技术可以用于地质勘探。
激光雷达技术
“雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜
索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散
射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框
图上也十分类似,见下图
激光雷达是工作在光频波段的雷达。
与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信
号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)
等信息,实现对目标的探测、跟踪和识别。
激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频。
分析激光雷达的三维成像方法激光雷达是一种能够利用激光束进行高精度测量和三维成像的仪器,已经在许多领域得到了广泛的应用。
在这篇文章中,我们将介绍激光雷达的三维成像方法,并分析其原理和优缺点。
激光雷达的三维成像方法主要可以分为两类:主动式成像和被动式成像。
主动式成像是指激光雷达主动地向目标物体发射激光束,然后测量其返回的激光信号来获取目标物体的三维信息。
被动式成像则是通过接收来自外部光源(如太阳光)的光线,通过分析光线经过目标物体后的散射模式来获得目标物体的三维形状。
主动式成像方法中最常用的是时间差法和相位差法。
时间差法是利用激光束往返的时间与光速的关系来测量目标物体与激光雷达之间的距离。
具体来说,激光雷达发射一束短脉冲的激光,计算激光从发射到返回所经过的时间,再乘以光速即可得到目标物体与激光雷达之间的距离。
相位差法则是利用激光返回时的相位差来计算距离。
这种方法在测量精度方面更高,但要求激光雷达具备高频率的激光发射器。
被动式成像方法中最常用的是结构光法和多视角法。
结构光法利用一个具有特定模式的光源(如激光投影仪)投射光线到目标物体上,通过观察光线经过目标物体后的散射模式来推导目标物体的三维形状。
多视角法则是通过同时从不同位置观察目标物体,从而获得多个角度的图像,然后结合这些图像来重构目标物体的三维形状。
这种方法常用于立体视觉中,可以实现较高的测量精度。
不同的三维成像方法各有优缺点。
主动式成像方法在测量距离方面具有较高的精度,并且可以在任何光照条件下工作。
然而,它需要激光雷达具备高速激光发射和接收的能力,且对目标物体的反射和散射能力有一定要求。
被动式成像方法则无需激光发射器,可以利用周围光源进行测量,且在测量速度和实时性方面较好。
但是它对环境光照条件有一定的要求,并且由于光线的散射和衍射效应,可能导致一定的测量误差。
总体而言,激光雷达的三维成像方法在测量和建模方面具有很高的精度和准确性,已经在许多领域得到了广泛的应用。

激光雷达成像原理与运动误差补偿方法1. 引言1.1 概述概述部分可以从以下几个方面展开:激光雷达是一种主要用于三维环境感知和建模的先进传感器技术。
它利用激光束通过扫描地面、建筑物和物体,获取高精度的三维点云数据,可以广泛应用于自动驾驶、环境监测、地图构建等领域。
本文旨在介绍激光雷达的成像原理以及运动误差补偿方法。
首先,我们将详细探讨激光雷达的成像原理,包括激光束的发射、接收和信号处理等过程。
通过了解激光雷达的工作原理,我们可以更好地理解其在三维环境感知中的优势和应用。
然后,我们将重点讨论运动误差对激光雷达成像质量的影响。
由于激光雷达在采集数据时往往需要进行扫描或旋转,运动导致的误差会对点云数据的准确性和完整性产生影响。
因此,我们将介绍不同类型的运动误差,并分析其对激光雷达成像的影响。
最后,针对运动误差问题,我们将介绍一些常用的运动误差补偿方法。
这些方法包括基于传感器硬件的校准方法、基于运动模型的运动补偿方法以及基于图像处理和算法的后处理方法等。
通过使用这些方法,可以有效地减小或消除运动误差对激光雷达成像质量的影响,提高数据的准确性和可靠性。
在本文的结论部分,我们将对激光雷达的成像原理和运动误差补偿方法进行总结,并展望未来可能的研究方向。
通过深入研究和探讨激光雷达的成像原理及其相关问题,可以为激光雷达技术的应用和发展提供重要的理论和实践支持。
同时,也为读者提供了更加全面和深入的了解激光雷达技术的机会。
1.2 文章结构文章结构部分的内容可以按照以下方式编写:文章结构:本篇长文主要包括引言、正文和结论三个部分。
引言部分主要包括概述、文章结构和目的三个方面。
首先,概述部分将简要介绍激光雷达成像原理与运动误差补偿方法的研究背景和意义。
然后,文章结构部分将阐述本篇长文的整体框架和内容安排,使读者能够清楚地了解各个章节的主题和内容。
最后,目的部分将明确本篇长文的研究目标和意图,以及解决的研究问题。
正文部分主要包括激光雷达成像原理、运动误差的影响和运动误差补偿方法三个方面。
激光雷达与摄像机融合成像算法-回复激光雷达与摄像机融合成像算法,是一种将激光雷达和摄像机获取的数据进行融合处理,从而得到更加准确、全面的场景成像结果的技术方法。
该算法在自动驾驶、机器人导航等领域具有重要的应用价值。
本文将从算法原理、数据采集、数据预处理、特征提取和融合算法等方面,一步一步回答该主题。
一、算法原理激光雷达通过激光束测量目标物体的距离和方向,得到离散的点云数据;而摄像机则通过图像传感器获取到连续的图像数据。
激光雷达提供了准确的三维空间信息,而摄像机则提供了丰富的颜色和纹理信息。
通过将两种传感器的数据进行融合,可以在提高场景感知的同时降低误检率,使得目标检测和识别更加准确。
二、数据采集激光雷达和摄像机两者需要配合工作,同时采集数据。
在采集数据时需要保证两种传感器的坐标系统一致,并且时间同步。
通常使用外部传感器,如GPS或IMU,来提供时间同步和准确的位置信息。
三、数据预处理由于激光雷达采集的数据是离散的点云数据,而摄像机采集的数据是连续的图像数据,需要进行一定的预处理工作。
首先,需要对激光雷达数据进行坐标转换,将其转换到摄像机坐标系下。
然后,对两种数据进行时空对齐,即将二者的数据在时间和空间上对齐。
最后,对图像数据进行去噪和畸变矫正,以提高后续的特征提取和匹配的准确性。
四、特征提取特征提取是激光雷达与摄像机融合成像算法的核心步骤。
通过将激光雷达数据和图像数据进行匹配,提取两种数据的共同特征,进而实现目标检测和识别。
常用的特征包括点云中的三维位置、颜色、纹理和形状等特征,以及图像中的边缘、角点和纹理等特征。
特征提取可以使用传统的图像处理算法,如边缘检测、角点检测和纹理描述子等,也可以使用深度学习的方法,如卷积神经网络(CNN)。
五、融合算法融合算法是激光雷达与摄像机融合成像算法的关键环节。
通过将两种数据的特征进行融合,得到更加准确、全面的场景成像结果。
常用的融合方法包括特征级融合和决策级融合。
激光雷达成像原理激光雷达(LIDAR)是近年来新兴的测量技术,它可以准确、快速地测量空间物体的形状和位置。
它借助于激光散射原理发射激光,并利用激射激光脉冲反射后发出的脉冲信号来测量它们距离探测器的距离,从而可以构建一维或三维物体的成像模型。
激光雷达的工作原理是,激光雷达发射一束脉冲激光,当激光照射到它们探测的物体之上时,物体会反射出一些脉冲,这些被反射的脉冲激光会被激光雷达传感器接收到,接收到反射激光脉冲之后,探测器就可以计算出物体与探测器之间的距离,并根据这些信息构建出一维或三维的成像模型。
激射光的脉冲有一个关键的参数,即信号强度,它可以衡量反射激光脉冲的强度,也可以衡量物体反射激光的强度,这一参数可以推算出物体的大小、形状和位置。
激光雷达的测量精度完全取决于激射激光的脉冲有效宽度、发射功率和脉冲数量等参数。
传统的激光雷达只能提供二维图像,而现在的激光雷达可以提供三维精确的图像,从而更有效地进行物体测量。
激光雷达技术被广泛应用于工业测量,机器视觉,机器人的实验等领域,已经成为一种必不可少的数字测量技术。
它可以提供高精度的数据,极大地提高了测量精度,从而有助于实现更准确,更快速地操作和检测。
与传统的测量方法相比,激光雷达利用激射激光来实现精密测量,因此具有更高的精度和更快的测量速度。
此外,由于激光雷达不受太空情况的限制,可以在有水或无水的环境中测量,它们可以比传统的测量技术提供更准确,更可靠的测量数据。
在本文中,我们介绍了激光雷达的成像原理,以及它的优点和应用。
激光雷达是当今最先进的测量技术,它可以施以准确、快速、可靠的测量,这种新兴的技术已经得到了广泛的应用。
未来,激光雷达将在更多领域得到广泛应用,并有助于实现更精确的测量。
基于线状阵列扫描的激光雷达快速三维成像激光雷达是一种通过发射激光束并测量其反射时间来获取目标物体距离和形状的设备。
在现代自动驾驶、机器人技术和三维重建等领域,激光雷达已经得到了广泛的应用。
传统的激光雷达系统在进行三维成像时存在着成像速度慢、数据处理复杂等问题。
针对这些问题,基于线状阵列扫描的激光雷达技术应运而生。
该技术通过使用线状阵列扫描的方式,能够快速获取目标物体的三维信息,具有成像速度快、数据处理简单等优点。
本文将详细介绍基于线状阵列扫描的激光雷达快速三维成像技术,包括其原理、系统构成和应用前景等方面。
一、基于线状阵列扫描的激光雷达原理基于线状阵列扫描的激光雷达系统是一种新型的三维成像技术,其原理基于激光雷达系统和线状阵列扫描技术的结合。
线状阵列扫描是一种通过激光束在水平方向上扫描目标物体并测量其反射时间来获取三维信息的技术。
具体而言,基于线状阵列扫描的激光雷达系统包括激光器、接收器、扫描镜、控制系统和数据处理系统等组成部分。
激光器用于发射激光束,接收器用于接收目标物体反射的激光信号,扫描镜用于在水平方向上扫描目标物体,控制系统用于控制激光束的扫描方向和速度,数据处理系统用于处理接收到的激光信号并生成三维图像。
具体而言,激光器是整个系统的核心部件,它负责发射激光束。
通常情况下,激光器采用半导体激光器或固体激光器,其具有发射波长窄、光束质量好、发射功率大等优点。
接收器是整个系统的另一个核心部件,它负责接收目标物体反射的激光信号。
通常情况下,接收器采用光电二极管或光电探测器,其具有响应速度快、灵敏度高等优点。
扫描镜是整个系统的另一个重要部件,它负责在水平方向上扫描目标物体。
通常情况下,扫描镜采用电机驱动或步进电机驱动,其具有扫描速度快、扫描精度高等优点。
控制系统是整个系统的核心控制部件,它负责控制激光束的扫描方向和速度。
数据处理系统是整个系统的核心处理部件,它负责处理接收到的激光信号并生成三维图像。
激光雷达技术的发展和应用激光雷达(Lidar)是一种利用激光束进行探测和测距的技术。
相比传统的雷达技术,激光雷达具有高精度、高分辨率、高抗干扰等优点,因此在各个领域有着广泛的应用。
本文将对激光雷达技术的发展和应用进行探讨。
首先,我们来看一下激光雷达技术的发展历程。
激光雷达最早是在20世纪60年代开始发展起来的,当时的激光雷达只能进行简单的目标探测和测距。
随着激光技术和光电探测技术的不断进步,激光雷达的性能也得到了大幅度提升。
在20世纪90年代以后,激光雷达进一步发展成为一种能够实现高分辨率三维成像的技术。
近年来,随着自动驾驶技术的快速发展,激光雷达也被广泛应用于无人驾驶汽车和机器人导航领域。
接下来,我们来看一下激光雷达技术在各个领域的应用。
首先是无人驾驶汽车领域,激光雷达被认为是实现无人驾驶的核心技术之一、激光雷达可以精确地扫描周围环境,获取高精度的三维点云数据,从而实现对车辆周围环境的实时感知和识别。
这对于无人驾驶车辆的安全行驶至关重要。
除了无人驾驶汽车,激光雷达在机器人导航和环境感知领域也有着广泛的应用。
激光雷达可以帮助机器人获取周围环境的精确地图信息,进而进行路径规划和避障等操作。
这对于机器人在未知环境中的智能导航具有重要意义。
此外,激光雷达还被广泛应用于地质勘探、大气污染监测、航空测绘以及军事侦察等领域。
激光雷达可以通过对地表或大气的激光扫描,获取地形、物体结构、气溶胶等信息,从而为相关领域的科研和应用提供数据支持。
激光雷达技术在医疗、安防、环境监测等领域也有着广泛的应用。
在医疗领域,激光雷达可以用于眼科手术、皮肤病变检测以及无创血糖监测等方面。
在安防领域,激光雷达可以实现对周边环境的监控和检测,提高安全性和防护性。
在环境监测领域,激光雷达可以帮助准确测量空气质量、水质等环境指标,提供科学依据。
总的来说,激光雷达技术的发展和应用已经取得了显著的进展。
它不仅在自动驾驶汽车和机器人导航等高科技领域发挥着重要作用,还在地质勘探、医疗和环境监测等领域有着广泛的应用前景。
基于线状阵列扫描的激光雷达快速三维成像【摘要】本文介绍了基于线状阵列扫描的激光雷达快速三维成像技术。
在首先概述了激光雷达技术的发展背景,接着介绍了线状阵列扫描技术及快速三维成像的重要性。
在详细解释了线状阵列扫描的工作原理,并阐述了基于该技术的激光雷达系统构架、数据处理方法,以及成像效果分析和应用领域探讨。
在总结了基于线状阵列扫描的激光雷达快速三维成像的优势,展望了未来发展方向。
本文系统地阐述了基于线状阵列扫描的激光雷达快速三维成像技术的重要性和优势,对相关领域的研究和应用具有一定的参考价值。
【关键词】激光雷达技术发展、线状阵列扫描、快速三维成像、工作原理、系统构架、数据处理、成像效果、应用领域、优势、未来发展、总结。
1. 引言1.1 激光雷达技术发展背景激光雷达技术是一种基于激光原理进行距离测量的技术,是近年来快速发展的一种先进传感器技术。
激光雷达具有高精度、高分辨率、远距离测量等优势,在工业、军事、地质勘探等领域有着广泛的应用。
随着科技的不断进步和需求的不断增长,激光雷达技术也在不断完善和升级。
过去的激光雷达大多采用旋转镜子或多个激光器进行扫描,这种方式虽然可以获取三维信息,但扫描速度较慢,限制了其在实时应用中的效果。
基于线状阵列扫描的激光雷达技术应运而生,通过线性扫描的方式可以大大提高扫描速度,实现快速三维成像,具有巨大的应用前景和发展潜力。
基于线状阵列扫描的激光雷达技术正在逐渐成为激光雷达领域的一个重要研究方向,对于推动激光雷达技术的发展和应用具有重要意义。
1.2 线状阵列扫描技术简介线状阵列扫描技术是一种激光雷达系统中常用的扫描技术之一,其通过使用一维的传感器阵列在水平方向进行扫描,可以实现快速高效的三维成像。
相比于传统的旋转扫描方式,线状阵列扫描技术具有更快的扫描速度和更高的分辨率,能够在较短的时间内获取更多的数据信息。
线状阵列扫描技术通过在一个平面上排列多个传感器单元,同时对目标进行光束扫描,从而实现对整个场景的有效覆盖。
新体制军用激光雷达成像技术马超杰,吴 丹(电子工程学院安徽省红外与低温等离子体重点实验室,合肥 230037) 摘 要:激光雷达成像技术广泛地应用于武器、航空、航天等领域,发挥了越来越重要的作用。
本文根据国内外激光雷达技术研究的最新进展,对非扫描激光成像雷达、多光谱激光成像雷达、激光合成孔径雷达、激光相控阵雷达、闪光成像激光雷达等新体制激光雷达分别进行了详细的介绍。
关键词:成像雷达;激光雷达;合成孔径雷达;相控阵雷达中图分类号:T N958.98 文献标识码:B 文章编号:1673-5048(2007)04-0025-05 New I magi n g Ladar Syste m Technology for M ilit ary Appli cati onMA Chao2jie,WU Dan(Key Lab of I nfrared and Low Te mperature Plas ma of Anhui Pr ovince,Hefei Electr onic Engineering I nstitute,Hefei230037,China) Abstract:I m age Ladar technol ogy is used widely in many domains:weapon,aviati on,s paceflight etc,and p lay a more and more i m portant r ole in the war field.Based on the latest research devel opment of Ladar,this paper describes different ne w Ladar syste m s res pectively,such as the non2scanned i m age Ladar,the multi2s pectral i m age Ladar,the phased array Ladar,the synthetic aperture Ladar,flash i m age Ladar. Key words:i m aging radar;laser radar;synthetic aperture radar;phased array radar0 引 言激光雷达(Laser Detecti on And Ranging,缩写Ladar)是以激光波束为信息载体的雷达。