测向交叉定位
- 格式:docx
- 大小:344.99 KB
- 文档页数:18

无线电监测中多站测向交叉定位精度研究摘要:针对无线电监测展开分析,总结多站测向交叉定位原理与工作内容,其次分别从多站测向交叉定位精度与仿真实验分析两个方面进行讨论,总结影响测向交叉定位精度的因素,最后总结启示,实施无线电监测工作,应该要重点分析周围环境,保证测向交叉定位精度。
关键词:无线电监测;多站测向交叉定位;电磁环境;空中电波无线电监测领域测向交叉定位是一项重要技术手段,用于日常信号监测、确定干扰源与不明信号。
随着当前无线电业务的创新,台站数量越来越多,致使无线电频谱资源越来越有限化,增加了电磁环境复杂性。
无线电监测有利于空中电波秩序管理与维护,一般会运用无线电定位系统,该系统在干涉仪测向体制交叉定位系统基础上运行。
如果排除信号监测覆盖、监测站站址测量误差等条件,通过几何稀释精度可以达到超短波监测网精准定位的目的。
基于此,下面重点围绕无线电监测领域的多站测向交叉定位精度展开讨论。
一、测向交叉定位实施无线电监测需要实时监督无线电管理范围信号特征与工作特征,例如敌方无线电信号频率、调制方式与工作特征等。
展开测向定位测定对象是无线电管理范围无线电信号来波方位,通过定位明确被测无线电辐射源所在地理位置[1]。
获取被测无线电信号的特征参数与工作特征之后展开分析,确定被测无线电通信网结构、通联规律,了解设备分布与类型等重要数据,采集无线电干扰设备的具体位置信息[2]。
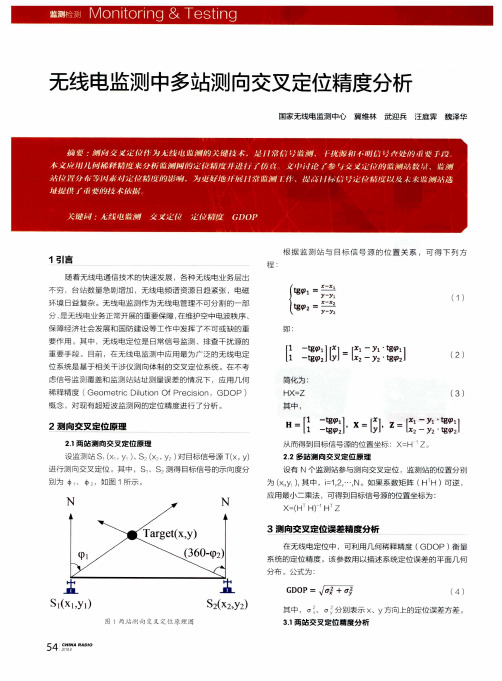
无线电监测设置监测站,负责目标信号源的侧向交叉定位,检测获取目标信号示向度。
按照监测站和目标信号源位置关系便可以总结方程,经过简化之后获取目标信号源位置坐标。
如果采用多站测向交叉定位,在设置监测站时数量通常设定为n个,全部参加到测向交叉定位中。
选择监测站所在位置,若系数矩阵可逆,需要运用最小二乘法,获得目标信号源位置坐标[3]。
例如监测站设置为S1(x1,y1)、S2(x2,y2),目标信号源设置为T(x,y)。
S1、S2监测得到目标信号示向度是φ1、φ2,得出监测站、目标信号源位置关系的方程如下:①,经过简化之后,得出目标信号源位置坐标,即X=H-1Z。

交叉定位算法交叉定位算法是一种用于确定目标位置的算法。
它通过利用多个观测点的测量数据,通过计算与目标的交叉角度或距离,来推断目标的具体位置。
这种算法广泛应用于无线通信、雷达、定位系统等领域。
一、算法原理交叉定位算法的原理基于三角测量的思想。
假设我们有三个观测点A、B、C,它们分别位于不同的位置,并且可以测量到与目标的角度或距离。
通过测量数据,我们可以得到观测点A、B、C与目标的夹角或距离,并且可以计算出观测点A、B、C之间的夹角或距离。
根据三角形的几何关系,我们可以推导出目标的位置。
二、算法步骤交叉定位算法的步骤可以概括为以下几点:1. 收集观测数据:首先,我们需要在不同位置设置观测点,并且能够测量到与目标的角度或距离。
这些观测点可以是天线、传感器等设备。
2. 计算观测点之间的夹角或距离:根据观测数据,我们可以计算出观测点之间的夹角或距离。
这些数据将作为后续计算的基础。
3. 推导目标位置:根据观测点之间的夹角或距离,我们可以利用三角形的几何关系,推导出目标的位置。
具体推导方法根据具体的算法而定,可以是迭代法、最小二乘法等。
4. 优化算法:为了提高算法的准确性和稳定性,我们可以通过优化算法来改进交叉定位算法。
例如,可以引入加权因子、滤波器等技术,来减小误差和噪声的影响。
三、应用领域交叉定位算法在无线通信、雷达、定位系统等领域有着广泛的应用。
以下是一些典型的应用场景:1. 无线通信:在无线通信系统中,交叉定位算法可以用于确定移动终端的位置。
通过利用多个基站的信号强度或时间差等测量数据,可以推导出移动终端的位置,从而实现室内定位、导航等功能。
2. 雷达系统:在雷达系统中,交叉定位算法可以用于确定目标的位置和速度。
通过多个雷达站的测量数据,可以计算出目标相对于雷达站的角度和距离,从而实现目标的跟踪和定位。
3. 定位系统:在定位系统中,交叉定位算法可以用于确定移动设备的位置。
通过利用多个接收器的测量数据,可以计算出移动设备相对于接收器的角度和距离,从而实现室内定位、导航等功能。

测向交叉定位原理
测向交叉定位(Differential Direction-of-Arrival)是一种基于多个接收器对信号进行测向,并通过交叉定位算法确定信号源位置的技术。
它广泛应用于雷达、无线通信等领域中的目标定位问题。
测向交叉定位的基本原理如下:
1. 测向:在信号源周围设置多个接收器,分别对信号进行测向,得到每个接收器接收到的信号方向。
2. 交叉定位:将每个接收器测得的信号方向数据传输至交叉定位处理器,处理器通过计算不同接收器测得的信号方向的角度差值,得出信号源在空间中的位置坐标。
具体来说,假设有三个接收器A、B、C,它们分别测得信号方向为θA、θB、θC,则信号源到三个接收器的距离分别为:
rA=OA·cosθA
rB=OB·cosθB
rC=OC·cosθC
其中,OA、OB、OC分别为接收器A、B、C到信号源的矢量。
通过交叉定位算法,可以解出信号源的坐标(x,y,z)。
常见的交叉定位算法有最小二乘法、加权最小二乘法等。
测向交叉定位的优点是定位精度高、受环境影响小、可靠性强等。
但同时也存在着一些缺点,例如需要大量的接收器设备、受信号源和环境的影响等。
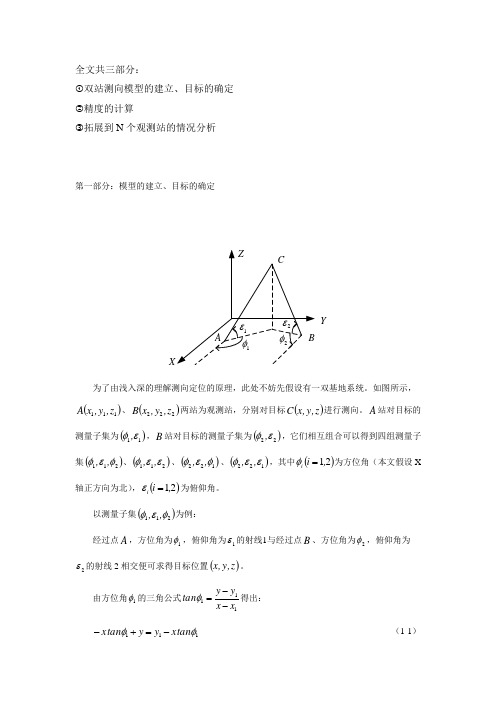
全文共三部分:①双站测向模型的建立、目标的确定 ②精度的计算③拓展到N 个观测站的情况分析第一部分:模型的建立、目标的确定XY为了由浅入深的理解测向定位的原理,此处不妨先假设有一双基地系统。
如图所示,()111z ,y ,x A 、()222z ,y ,x B 两站为观测站,分别对目标()z ,y ,x C 进行测向。
A 站对目标的测量子集为()11εφ,,B 站对目标的测量子集为()22εφ,,它们相互组合可以得到四组测量子集()211φεφ,,、()211εεφ,,、()122φεφ,,、()122εεφ,,,其中()21,i i =φ为方位角(本文假设X 轴正方向为北),()21,i i =ε为俯仰角。
以测量子集()211φεφ,,为例:经过点A ,方位角为1φ,俯仰角为1ε的射线1与经过点B 、方位角为2φ,俯仰角为2ε的射线2相交便可求得目标位置()z ,y ,x 。
由方位角1φ的三角公式111x x y y tan --=φ得出: 111φφtan x y y tan x -=+- (1-1)由俯仰角1ε的三角公式1111φεsin y y z z tan --=得出: 111111φεφεsin z tan y sin z tan y -=- (1-2)由方位角2φ的三角公式222x x y y tan --=φ得出: 222φφtan x y y tan x -=+- (1-3) 由俯仰角2ε的三角公式2222φεsin y y z z tan --=得出: 222222φεφεsin z tan y sin z tan y -=- (1-4) 将方程组(1-1)、(1-2)、(1-3)表示成矩阵形式为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---222111111121101001φφεφφφεφtan x y sin z tan y tan x y z y x tan sin tan tan简化表示为:Z HX =其中()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=2221111111211101001φφεφφφεφtan x y sin z tan y tan x y Z z ,y ,x X ,tan sin tan tan H T从而得出辐射源的位置坐标Z H X 1-=同理可知其他三个组合也可以求出辐射源的位置坐标。
测向交叉定位协同信息远程传输方法创新3500字被动探测由于具有隐蔽性好、探测距离远、目标识别和抗干扰能力强的特点,能够大大增强水面舰艇在现代海战场复杂电磁环境中的生存力[1?2]。
被动测向交叉定位是较为常用的一种协同定位方法。
研究发现被动传感器的协同距离,也就是基线长度越长,测向交叉定位的精度越高[3?4]。
基线长度主要取决于被动传感器之间的通信作用距离。
目前水面舰艇测向交叉定位所采用的微波协同定位信息传输手段作用距离较近,导致协同定位精度偏低,满足不了武器打击的目指精度要求。
因此,迫切需要一种远程数据传输手段用于舰载被动传感器的测向交叉定位协同信息交换。
2012年12月北斗二代卫星导航系统正式开通,其服务区域覆盖了我国全境、西太平洋及南海广大海域。
北斗系统所独有的短报文通信功能可以实现用户与用户、用户与地面控制中心之间的双向报文通信,作用距离能够跨越北斗系统的整个服务区域。
同时,北斗短报文通信作为一种可靠的远程数据传输手段,目前在通信领域已经得到了广泛的应用[5?8]。
为此,本文提出利用北斗短报文远程通信手段增加基线长度,提高协同定位精度的舰载被动传感器测向交叉定位方案。
本文在简单介绍测向交叉定位工作原理的基础上,依据北斗短报文通信的技术指标对方案进行可行性分析;然后从系统设计、工作流程、通信协议和差错控制四个方面对方案进行详细阐述。
1 测向交叉定位工作原理测向交叉定位工作原理如图1所示。
由图1可以看出,测向交叉定位主要分为以下三个阶段:图1 测向交叉定位工作原理(1)建立通信发起方发送建立通信申请报文,其主要内容为发起方通信地址、时间信息和发起方位置信息。
协同方接收后结合自己位置解算发起方方位距离,并准备发回响应报文。
协同方发送建立通信响应报文,其内容包括时间信息和协同方位置信息,发起方接收后结合自己位置解算协同方方位距离,并确认双方通信建立完毕。
(2)确定定位目标发起方发送协同定位申请报文,其中包含了时间信息、发起方位置信息、协同探测目标批号、目标辐射源载频、脉宽、重复频率信息,协同方接收后确认协同定位目标,准备开始协同定位。
测向交叉定位实验报告一、 实验目的1、通过实验进一步加深对二维平面内测向交叉定位原理的理解;2、通过实验掌握利用最小二乘法提高二维平面内测向交叉定位精度的方法;3、提高Matlab 编程能力。
二、实验原理已知两个侦察站的位置(X 1,y 1)和(x 2,y 2),由于它们对辐射源E 测向,测得的方位角分别为1θ与2θ并得到两条位置线即等方位线,利用两条位置线相交所得的交点即可确定辐射源的坐标位置(x e ,y e ),如图1。
从图可知:1111y e e y tg m x x θ-==-2222y e e y tg m x x θ-==-由于(x 1,y 1)和(x 2,y 2)的两个坐标是已知的,而1θ与2θ是测得的,即m 1和m 2是可以测得到。
现把已知量和未知量左右分开可得:11111e e y m x y m x b -=-=22222e e y m x y m x b -=-=则得112211e e x m b y m b -⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦即1112211e e x m b y m b --⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦ 12112221e y y m x m x x m m --+=-211212112221e m y m y m m x m m x y m m --+=-三、定位误差分析上式是不考虑测向误差和侦察站的位置误差情况下求得的辐射源位置,实际上测向和测量侦察站的位置都是有误差的,由于这些误差的存在,将影响定位精度,下面分析园概率误差,研究辐射源的定位精度与测向误差及侦察站位置配置的关系。
由于测量误差是随机的,因此辐射源的位置也是随机的,它一般符合二维正态分布,当测量误差服从正态分布时,常用中间误差E 的大小来表示测度精度。
中间误差E 可由误差落在-E 与E 范围的概率为1/2时求得:即22()21()2x a EEEEf x dx edx σ----==⎰则E ==其中E 称为中间误差,又称分算误差,E 愈小表示测量精度愈高。
测向交叉定位实验报告实验内容测向交叉定位姓名*** 单位***学号*** 实验环境MATLAB 实验时间**年**月**日一.实验目的1、掌握二维测向交叉定位方法;2、掌握二维测向交叉定位的误差。
二.实验内容设定两个测向站,设置其位置坐标参数,对辐射源的测向角度。
分别给定出真实值和测量值(包含误差),并且分别计算出辐射源的理论位置和测量位置,二者进行比较并且计算出圆概率误差CEP和定位模糊区大小和位置误差。
三.实验原理1.测向原理二维平面测向定位:在已知的两个或多个不同位置上测量雷达辐射电磁波的方向,各站测得的雷达方向数据按三角测量法交会计算出雷达的位置(图1)。
雷达与两个测量站的距离分别为若已知两个侦察站的位置为11(,)x y 和22(,)x y ,由它们对辐射源E 测向,测得的方位角分别为1θ和2θ(由方位基准逆时针为正向),并得到两条位置线即等方位线,利用两条位置线相交所得的交点即可确定辐射源的坐标位置(,)eex y 。
1111e e y y tg m x x θ-==- 2222ee yy tg m xx θ-==-由于11(,)x y 和22(,)x y 的两个坐标位置是已知的,而1θ和2θ是测得的,即1m 和2m 可以测量得到。
则可以得到辐射源位置:1112211e e x m b y m b --⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦2. 圆概率误差为222221120.75110.75sin()sin sin xe ye h CEP θσσσθθθθ≈+=+- 当155θ≈,2125θ≈时,CEP 达到最小值,此时2222CEP K θθ≈≈3. 定位模糊区2221232112214()4()4sin sin()sin sin sin()R R th uv h tg A θθθθθθθθθ∆∆===--当1=60θ,2=120θ时,A达到最小值,此时2222min34()62()(sin 60)h tg A h tg θθ∆==∆4. 位置误差测得的位置与真实位置之间的距离r 成为位置误差。
22222112212123232cos (sin )R R R R r θθθθθθ∆+∆+∆∆=222231211[](sin )(sin )(sin )r h θσσθθθ=+四. 实验结果 圆概率误差1. 设置测向站位置和参数,角度设定,测量辐射源位置。
设定目标位置11(,)=(0,0)x y 和22(,)=(0,45)x y ,测向角度1=50θ和2=120θ,测得辐射源真实位置(,)=(15.3885,18.3369)e e x y 。
2. 规定测角误差,得到辐射源的测量值规定测角误差为0.005π rad ,测得一组辐射源位置(,)=(15.3751,18.2617)eex y 。
3. 圆概率误差:求出当前情况下CEP = 0.5640。
4. 测向交叉定位及模糊区示意图如图1所示。
图1 测向交叉定位示意图定位模糊区当设定测向角度1=50θ和2=120θ,测量误差=0.005θπ∆的时候,通过计算2221232112214()4()4sin sin()sin sin sin()R R th uv h tg A θθθθθθθθθ∆∆===--得到定位模糊区A= 0.3750。
位置误差当设定测向角度1=50θ和2=120θ,测量误差=0.005θπ∆的时候,通过计算22222112212123232cos (sin )R R R R r θθθθθθ∆+∆+∆∆=得到r^2=0.5161. 五. 结果分析 圆概率误差1. 改变测角误差,观察CEP 的变化变化测角的方差σ,其变化值为0~0.02π,重新测量CEP ,得到如图2的结果。
同时观察定位模糊区的改变如图3所示。
图2 CEP随测角误差变化图由图2可以看出,当改变测角精确度,即测角误差时,CEP会随着测角误差增大而增大,这种趋势基本呈线性关系。
图3 定位模糊区示意图由图3可以看出,当测角误差由0.001π增大到0.02π,定位模糊区明显增大,测量出的辐射源位置分布在更大的范围内。
固定测角误差,改变测向站测角大小,即改变测向站与辐射源的位置关系,观察CEP 的变化如图4图5和所示。
理论上当155θ≈,2125θ≈时,CEP 达到最小值,此时2222CEP K θθ≈≈图4 CEP 随测量角度变化图图5 CEP随测量角度变化图定位模糊区1.改变测角误差,观察A的变化变化测角的方差σ,其变化值为0~0.02π,重新测量A,得到如图6的结果。
从图中可以看出,定位模糊区A的随测角误差变化基本呈现平方关系。
这也验证了理论公式中的关系。
2.改变测向角度,观察定位模糊区A的变化图6定位模糊区随测角误差变化图位置误差改变测角误差,观察位置误差2r的变化变化测角的方差σ,其变化值为0~0.02π,重新测量2r,得到如图7的结果。
图7位置误差随测角误差变化图六.实验代码1.2.改变测角误差 ,观察CEP、A和2r的关系%% 测向交叉定位clear all;clc;close all;%% 正态分布N=50;n=12; %设定独立均匀分布变量的个数u=0.5;zb=zeros(1,N); %设定za初始值为零矩阵for i=1:nzb=zb+(rand(1,N)-u);endza=(zb-mean(zb))./(sqrt(var(zb)));%% 位置及角度数据%设定第一个测向点位置为(0,0);目标位置为(xe,ye)%第二个侧向点位置随机产生x1=0;y1=0;x2=0;y2=45;sita1=50/57.3; %真实值1sita2=120/57.3; %真实值2C1=tan(sita1); %真实C2=tan(sita2);zhenshi=inv([C1,-1;C2,-1])*[C1*x1-y1;C2*x 2-y2]; %真实位置R1=sqrt((zhenshi(1)-x1)^2+(zhenshi(2)-y1) ^2);R2=sqrt((zhenshi(1)-x2)^2+(zhenshi(2)-y2) ^2);cjwc=0:.001*pi:0.02*pi;CEP=zeros(1,length(cjwc));A=zeros(1,length(cjwc));r_fang=zeros(1,length(cjwc));for j=1:length(cjwc)delt_theta=cjwc(j); %方差theta1=sita1+random('Normal',0,delt_theta ,[1,N]); %测量值1theta2=sita2+random('Normal',0,delt_theta ,[1,N]); %测量值2figure(1);plot(x1,y1,'ko',x2,y2,'ko',zhenshi(1),zhe nshi(2),'r*');hold on;line([x1,x2],[y1,y2],'color','k','linewid th',2);hold on;line([x1,zhenshi(1)],[y1,zhenshi(2)],'col or','k','linewidth',2);hold on;line([x2,zhenshi(1)],[y2,zhenshi(2)],'col or','k','linewidth',2);hold on;wzgj=zeros(N,2); %位置测量值for i=1:Nc1=tan(theta1(i)); %测量c2=tan(theta2(i));wzgj(i,:)=inv([c1,-1;c2,-1])*[c1*x1-y1;c2 *x2-y2]; %测量位置plot(wzgj(i,1),wzgj(i,2),'b+');hold on; endwc1=wzgj(:,1)-zhenshi(1);wc2=wzgj(:,2)-zhenshi(2);var_delxe=var(wc1);var_delye=var(wc2);CEP(j)=0.75*sqrt(var_delxe+var_delye);A(j)=4*(zhenshi(1))^2*(tan(delt_theta))^2 /(sin(sita1)*sin(sita2)*sin(sita2-sita1)) ;r_fang=R1^2*(delt_theta)^2+R2^2*(delt_the ta)^2+2*R1*R2*(delt_theta)^2*cos(sita2-si ta1).../(sin(sita2-sita1))^2;endfigure(2);plot(cjwc,CEP);xlabel('测角误差σ');ylabel('CEP'); figure(3)plot(cjwc,A,'r');hold on;xlabel('测角误差σ');ylabel('定位模糊区A');p=polyfit(cjwc,A,2);f = polyval(p,cjwc); %% 二次拟合测角误差σ和定位模糊区A的关系plot(cjwc,f,'*k');legend('测量关系','二次拟合关系');figure(4)plot(cjwc,r_fang,'ro');hold on;xlabel('测角误差σ');ylabel('位置误差r^2');3.改变测量角度θ和2θ,观察CEP的变化11)逐个改变,逐个计算%% 测向交叉定位clear all;clc;close all;%% 正态分布N=50;n=12; %设定独立均匀分布变量的个数u=0.5;zb=zeros(1,N); %设定za初始值为零矩阵for i=1:nzb=zb+(rand(1,N)-u);endza=(zb-mean(zb))./(sqrt(var(zb)));%% 位置及角度数据%设定第一个测向点位置为(0,0);目标位置为(xe,ye)%第二个侧向点位置随机产生x1=0;y1=0;x2=0;y2=45;N1=200;ji1=linspace(20,80,N1);ji2=linspace(95,150,N1);[jiao1,jiao2]=meshgrid(ji1,ji2);sita1=jiao1/57.3; %真实值1sita2=jiao2/57.3; %真实值2delt_theta=0.001*pi; %方差C1=tan(sita1); %真实C2=tan(sita2);zhenshi=zeros(N1,N1,2);CEP=zeros(N1,N1);for j=1:N1 %改变40度for m=1:N1 %改变110度zhenshi(m,j,:)=inv([C1(m,j),-1;C2(m,j),-1 ])*[C1(m,j)*x1-y1;C2(m,j)*x2-y2]; %真实位置theta1=delt_theta*za+sita1(m,j); %测量值1theta2=delt_theta*za+sita2(m,j); %测量值2wzgj=zeros(N,2); %位置测量值for i=1:Nc1=tan(theta1(i)); %测量c2=tan(theta2(i));wzgj(i,:)=inv([c1,-1;c2,-1])*[c1*x1-y1;c2*x2-y2]; %测量位置endwc1=wzgj(:,1)-zhenshi(m,j,1);wc2=wzgj(:,2)-zhenshi(m,j,2);var_delxe=var(wc1);var_delye=var(wc2);CEP(m,j)=0.75*sqrt(var_delxe+var_delye); endendmesh(jiao1,jiao2,CEP);hold on;。