D 1P =
2 δ11 0 0 M M M M M 二、力法的典型方程 i i k i P d = ds 0 , d = ds = 0 , D = ds = ↓↓↓↓↓↓↓↓ ii ik iP δ21 0 B EI EI EI q 0 0 ↓↓↓↓↓↓↓↓
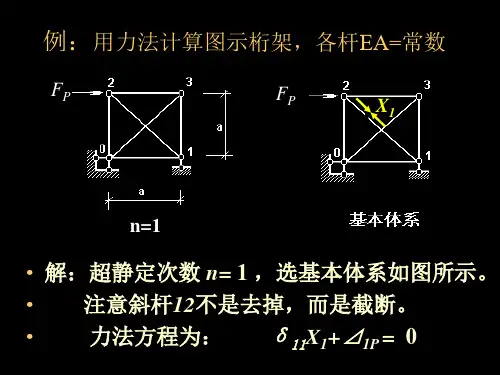
B 主系数恒为正,付系数、自由项可正可负可为零。主系数、付 ΔBH=Δ1 =0 ×X1 系数与外因无关,与基本体系的选取有关,自由项与外因有关。 = ΔBV=Δ2=0 = +
6.2 力法的基本概念
一.力法的基本原理
力法的基本概念 1、超静定结构计算的总原则: 欲求超静定结构先取一个基 本体系,然后让基本体系在受 力方面和变形方面与原结构完 全一样。
q ↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓B
〓
RB
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓B 当ΔB=Δ1=0
力法的特点: 基本未知量——多余未知力; 基本体系——静定结构; 基本方程——位移条件 (变形协调条件)。
超静定次数 = 多余约束的个数
( 1)
即: 把原结构变成静定结构时所需撤除的约束个数。
从静力特征来看,超静定次数等于根据平衡方程计算未 知力时所缺少的方程的个数,因此
超静定次数 = 多余未知力的个数 = 未知力个数 - 平衡方程的个数
( 2)
由 (1) 式确定结构的超静定次数 ,为“解除多余约束 法”。
d
d =l /3 EI 11
l
X1=1 Pl P
Pl
3 D = Pl /2 EI 1 P X 3 P /2 ( ) 1=
M = M X M 1 1 P
MP
1 P l 2
l
M1
M
6.3 超静定结构在荷载作用下的计算