动态规划讲义
- 格式:ppt
- 大小:117.50 KB
- 文档页数:17
动态规划是对最优化问题的一种新的算法设计方法。
由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的没计法对不同的问题,有各具特色的表示方式。
不存在一种万能的动态规划算法。
但是可以通过对若干有代表性的问题的动态规划算法进行讨论,学会这一设计方法。
多阶段决策过程最优化问题——动态规划的基本模型在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。
因此各个阶段决策的选取不能任意确定,它依赖于当前面临的状态,又影响以后的发展。
当各个阶段决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线。
这种把一个问题看做是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题称为多阶段决策最优化问题。
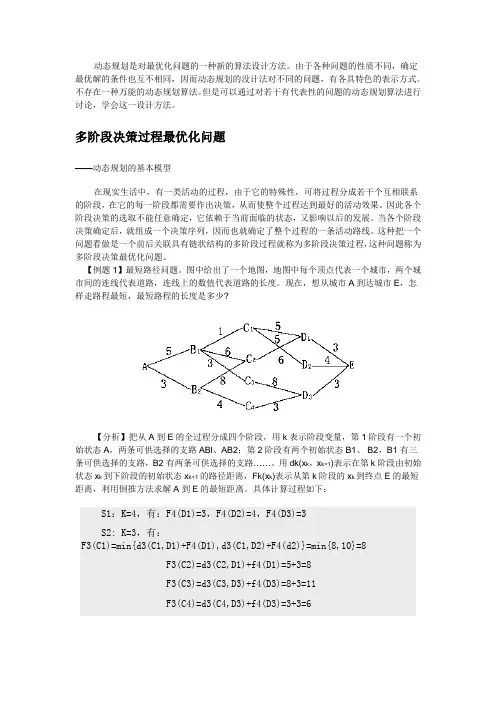
【例题1】最短路径问题。
图中给出了一个地图,地图中每个顶点代表一个城市,两个城市间的连线代表道路,连线上的数值代表道路的长度。
现在,想从城市A到达城市E,怎样走路程最短,最短路程的长度是多少?【分析】把从A到E的全过程分成四个阶段,用k表示阶段变量,第1阶段有一个初始状态A,两条可供选择的支路ABl、AB2;第2阶段有两个初始状态B1、 B2,B1有三条可供选择的支路,B2有两条可供选择的支路……。
用dk(x k,x k+1)表示在第k阶段由初始状态x k到下阶段的初始状态x k+1的路径距离,Fk(x k)表示从第k阶段的x k到终点E的最短距离,利用倒推方法求解A到E的最短距离。
具体计算过程如下:S1:K=4,有:F4(D1)=3,F4(D2)=4,F4(D3)=3S2: K=3,有:F3(C1)=min{d3(C1,D1)+F4(D1),d3(C1,D2)+F4(d2)}=min{8,10}=8F3(C2)=d3(C2,D1)+f4(D1)=5+3=8F3(C3)=d3(C3,D3)+f4(D3)=8+3=11F3(C4)=d3(C4,D3)+f4(D3)=3+3=6S2: K=2,有:F2(B1)=min{d2(B1,C1)+F3(C1),d2(B1,C2)+f3(C2),d2(B1,C3)+F3(C3)}=min {9,12,14}=9F2(m)=min{d2(B2,c2)+f3(C2),d2(B2,C4)+F3(C4)}=min{16,10}=10S4:k=1,有:F1(A)=min{d1(A,B1)+F2(B1),d1(A,B2)+F2(B2)}=min{13,13}=13因此由A点到E点的全过程的最短路径为A—>B2一>C4—>D3—>E。
![#5 运筹学讲义[目标规划、动态规划]](https://uimg.taocdn.com/6b7353ccaeaad1f346933fc7.webp)

运筹学教案动态规划一、引言1.1 课程背景本课程旨在帮助学生掌握运筹学中的动态规划方法,培养学生解决实际问题的能力。
1.2 课程目标通过本课程的学习,学生将能够:(1)理解动态规划的基本概念和原理;(2)掌握动态规划解决问题的方法和步骤;(3)能够应用动态规划解决实际问题。
二、动态规划基本概念2.1 定义动态规划(Dynamic Programming,DP)是一种求解最优化问题的方法,它将复杂问题分解为简单子问题,并通过求解子问题的最优解来得到原问题的最优解。
2.2 特点(1)最优子结构:问题的最优解包含其子问题的最优解;(2)重叠子问题:问题中含有重复子问题;(3)无后效性:一旦某个给定子问题的解确定了,就不会再改变;(4)子问题划分:问题可以分解为若干个子问题,且子问题之间是相互独立的。
三、动态规划解决问题步骤3.1 定义状态状态是指某一阶段问题的一个描述,可以用一组变量来表示。
3.2 建立状态转移方程状态转移方程是描述从一个状态到另一个状态的转换关系。
3.3 确定边界条件边界条件是指初始状态和最终状态的取值。
3.4 求解最优解根据状态转移方程和边界条件,求解最优解。
四、动态规划应用实例4.1 0-1背包问题问题描述:给定n个物品,每个物品有一个重量和一个价值,背包的最大容量为W,如何选择装入背包的物品,使得背包内物品的总价值最大。
4.2 最长公共子序列问题描述:给定两个序列,求它们的最长公共子序列。
4.3 最短路径问题问题描述:给定一个加权无向图,求从源点到其他各顶点的最短路径。
5.1 动态规划的基本概念和原理5.2 动态规划解决问题的步骤5.3 动态规划在实际问题中的应用教学方法:本课程采用讲授、案例分析、上机实践相结合的教学方法,帮助学生深入理解和掌握动态规划方法。
教学评估:课程结束后,通过课堂讨论、上机考试等方式对学生的学习情况进行评估。
六、动态规划算法设计6.1 动态规划算法框架介绍动态规划算法的基本框架,包括状态定义、状态转移方程、边界条件、计算顺序等。