微型计算机控制技术赖寿宏版3
- 格式:pptx
- 大小:696.97 KB
- 文档页数:43

0951农业推广095108 渔业初试:337农业知识综合二:《动物遗传学》,刘祖洞主编《遗传学》(第2版),高等教育出版社,2001;《动物营养学与饲料学》,李爱杰主编《水产动物营养与饲料学》,中国农业出版社;《动物繁殖学》,王武主编《鱼类增养殖学》,中国农业出版社,2000;835渔业领域技术综合复试:《渔业经济学》,胡笑波主编,中国农业出版社加试:鱼类学,《鱼类学与海水鱼类养殖》苏锦祥主编,中国农业出版社。
095110农村与区域发展初试:339农业知识综合四:《农村社会学》,李守经主编,高等教育出版社,2000年版;《农业经济学》,雷海章主编《现代农业经济学》,中国农业出版社,2003年版;《管理学》,周三多,高等教育出版社; 836农村与区域发展技术综合复试:《农村政策学》,谭向勇主编,中国农业出版社。
095113食品加工与安全初试:338农业知识综合三:《食品卫生学》,轻工业出版社,2007;食品安全管理与法规:《食品法律法规与标准》,吴晓彤、王尔茂,科学出版社,2010年;食品分析与检验技术:《食品分析与检验》,康臻著,中国轻工业出版 2006;837食品加工与安全技术综合:《食品安全性与分析检测》许牡丹,化学工业出版社,2003。
社,2010年出版;《食品安全学》钟耀广主编,化学工业出版社,2010年出版;加试:《食品工程原理》廖世荣主编,科学出版社,2009年出版;《食品化学》丁芳林主编,华中科技大学出版社,2010年出版。
0254国际商务初试: 434国际商务专业基础加试:《西方经济学》(上、下册)高鸿业主编,中国人民大学出版社,第四版。
全国MBA教育指导委员会编著,机械工业出版社。
0451 教育045101教育管理初试:吴志宏冯大鸣魏志春:《新编教育管理学》,华东师范大学出版社,2008;1、全国十二所重点师范大学联合编写:《教育学基础》,教育科学出版社2006年。
2、孙培青主编:《中国教育史》,华东师范大学出版社2009年版。
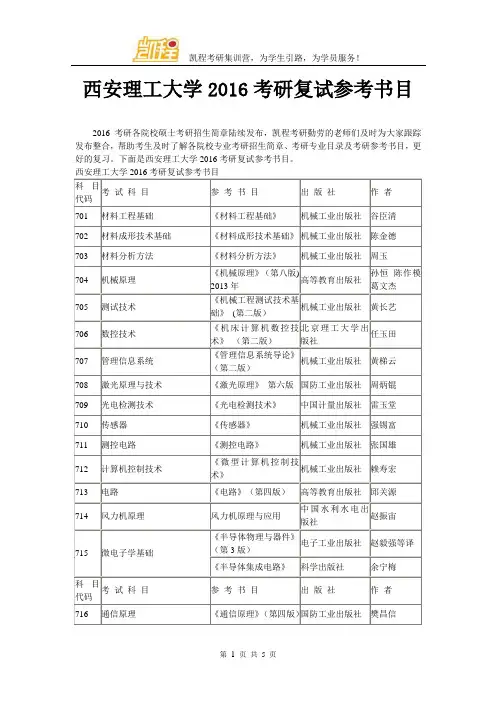
西安理工大学2016考研复试参考书目2016考研各院校硕士考研招生简章陆续发布,凯程考研勤劳的老师们及时为大家跟踪发布整合,帮助考生及时了解各院校专业考研招生简章、考研专业目录及考研参考书目,更好的复习。
下面是西安理工大学2016考研复试参考书目。
西安理工大学2016考研复试参考书目科目代码考试科目参考书目出版社作者701 材料工程基础《材料工程基础》机械工业出版社谷臣清702 材料成形技术基础《材料成形技术基础》机械工业出版社陈金德703 材料分析方法《材料分析方法》机械工业出版社周玉704 机械原理《机械原理》(第八版)2013年高等教育出版社孙恒陈作模葛文杰705 测试技术《机械工程测试技术基础》(第二版)机械工业出版社黄长艺706 数控技术《机床计算机数控技术》(第二版)北京理工大学出版社任玉田707 管理信息系统《管理信息系统导论》(第二版)机械工业出版社黄梯云708 激光原理与技术《激光原理》第六版国防工业出版社周炳锟709 光电检测技术《光电检测技术》中国计量出版社雷玉堂710 传感器《传感器》机械工业出版社强锡富711 测控电路《测控电路》机械工业出版社张国雄712 计算机控制技术《微型计算机控制技术》机械工业出版社赖寿宏713 电路《电路》(第四版)高等教育出版社邱关源714 风力机原理风力机原理与应用中国水利水电出版社赵振宙715 微电子学基础《半导体物理与器件》(第3版)电子工业出版社赵毅强等译《半导体集成电路》科学出版社余宁梅科目代码考试科目参考书目出版社作者716 通信原理《通信原理》(第四版)国防工业出版社樊昌信717 数字信号处理《数字信号处理》西安电子科技大学出版社丁玉美718 电力拖动自动控制系统《电力拖动自动控制系统》机械工业出版社陈伯时719 微机原理及接口技术《微型计算机原理》西安电子科技大学出版社姚燕南720 流体机械《流体机械原理》机械工业出版社张克危721 发电机组自动调节《水轮机调节》(第三版)水利水电出版社沈祖怡722 电力系统继电保护《继电保护原理》中国电力出版社贺家李722 电力系统自动装置《电力系统自动装置》中国电力出版社杨冠成723 水处理微生物环境工程微生物学(第三版)高等教育出版社周群英724 水泵及水泵站《泵与泵站》中国建筑工业出版社姜乃昌725 水土保持学《中国水土保持》科学出版社唐克丽726 工程水力学《水力学》(下册)中国水利水电出版社张志昌727 工程水文学《工程水文学》(第四版)中国水利水电出版社詹道江728 水工建筑物《水工建筑物》水利水电出版社天津大学编729 农田水利工程《灌溉排水工程学》中国农业出版社汪志农730 工程项目管理《工程项目管理》中国建筑工业出版社丁士昭731 河流动力学《河流动力学概论》清华大学出版社邵学军王兴奎732 水轮机《水轮机》水利水电出版社刘大恺733 港口航道工程学《港口航道工程学》高等教育出版社周素真734 地下水水文学《地下水水文学》中国水利水电出版社张元禧、施鑫源735 环境工程基础《环境工程基础》中国建筑出版社湖南大学编736 环境学《环境学》中国环境科学出版社陈英旭737 水土保持工程学《水土保持工程学》中国林业出版社王礼先738 土壤学《土壤学》中国农业出版社黄昌勇739 人口、资源与环境经济学《人口、资源与环境经济学》中国经济出版社1999年杨云彦740 应用统计学《统计学》第三版中国人民大学出版社贾俊平741 区域经济学《区域经济学》(第一版)科学出版社吴殿廷742 金融学《金融学》(第三版)2012年12月中国人民大学出版社黄达743 国际贸易(理论、政策与实务)《国际贸易理论与政策》西安交通大学出版社冯宗宪《国际贸易实务》(第三版)对外经贸大学出版社黎孝先744 生产与运作管理《生产与运作管理》(第二版)高等教育出版社2005年12月陈荣秋马士华745 数据库系统《数据库系统概论》(第四版)高等教育出版社萨师煊王珊746 会计学《会计学》(第二版)上海财经大学出版社2005年12月陈信元747 技术经济学《工业技术经济学》(第三版)清华大学出版社傅家骥科目代码考试科目参考书目出版社作者748 工业工程基础《基础工业工程》机械工业出版社易树平郭伏749 会计学《财务会计学》(第5版)2009-10-01中国人民大学出版社戴德明林钢赵西卜著《中级财务会计》(第三版)东北财经大学出版社刘永泽等主编750 计算机辅助设计(产品设计)751 计算机辅助设计(环艺设计)752 计算机辅助设计(视觉传达)753 计算机辅助设计(媒体影像)《大学摄影教程》中国水利水电出版社张辉754 机械设计基础《机械设计基础》(第六版)2013年高等教育出版社杨柯桢程光蕴755 人机工程学《人机工程学》(第二版)2000年北京理工大学出版社丁玉兰756 弹性力学A 《弹性力学》高等教育出版社徐芝伦757 结构力学《结构力学教程》高等教育出版社龙驭球758 工程地质《工程地质学》水利水电出版社崔冠英759 钢筋混凝土结构《钢筋混凝土基本构件》陕西科技出版社童岳生760 弹性力学B 《弹性力学简明教程》第三版高等教育出版社徐芝纶761 规划设计762 建筑设计763 印刷工艺学《印刷工艺学》印刷工业出版社刘昕764 印刷机械设计与计算《轮转机设计与计算》印刷工业出版社黄康生765 包装工艺学《包装工艺学》印刷工业出版社潘松年766 数字图像处理《数字图像处理与分析》清华大学出版社龚声蓉、刘纯平等767 计算机图形学《计算机图形学原理与实践》印刷工业出版社吴学毅768 包装印刷基础《包装印刷》印刷工业出版社金银河《特种印刷》化学工业出版社黄颖为769 数学综合(概率论与数理统计50%,常微分方程50%)《概率论与数理统计教程》高等教育出版社魏宗舒《常微分方程》高等教育出版社王高雄770 普通物理《大学物理简明教程》2010.8 第1版机械工业出版社施卫771 光学《光学》(第2、3、4、7章)2009.8北京大学出版社赵凯华772 化学综合(仪器分析占50%、物理化学50%)《仪器分析》(第三版)高等教育出版社朱明华《物理化学》(第三版)高等教育出版社宋世模773 翻译与写作1、1、《英语写作基础教程》高等教育出版社丁往道2 2、《高级英语写作教程》外语教学与研究出版社李赋宁3、3、《英汉翻译教程》上海外语教育出版社张培基4、《汉英翻译教程》陕西人民出版社喻云根774 英汉互译1、《英语写作基础教程》高等教育出版社丁往道2 《高级英语写作教程》外语教学与研究李赋宁出版社775 英语写作3 《英汉翻译教程》上海外语教育出版社张培基《汉英翻译教程》陕西人民出版社喻云根776 中国近现代史纲要《中国近现代史纲要》高等教育出版社编写组777 教育学原理《教育基本理论研究》安徽教育出版社王坤庆著778 计算机操作系统原理《计算机操作系统》西安电子科技大学出版社汤子瀛779 投资学基础《投资学》(第二版)2013.1中国金融出版社张元萍780 印刷机原理与结构《印刷机设计》印刷工业出版社张海燕《印刷机械(第二版)》印刷工业出版社成刚虎小提示:目前本科生就业市场竞争激烈,就业主体是研究生,在如今考研竞争日渐激烈的情况下,我们想要不在考研大军中变成分母,我们需要:早开始+好计划+正确的复习思路+好的辅导班(如果经济条件允许的情况下)。
东北大学硕士学位论文VOD炉计算机控制系统设计和控制算法研究姓名:***申请学位级别:硕士专业:控制理论与控制工程指导教师:***20050201东北大学硕上学位论文第一章绪论1.1.2.2VOD法的特点图1.1VOD精炼炉示意图Fi91.1VODrefiningfurnacestructureVOD法主要特点为:(I>降碳保铬效果好,通过控制真空度,可在铬几乎不被氧化的情况下脱碳。
脱碳后用于还原渣中Cr203的还原剂用量少。
(2)由于是在钢包炉中精炼,精炼后不吸收N2,这更适合冶炼超低氮的不锈钢。
(3)脱氧效果良好,但是VOD法的脱硫效果较差,生产效率低。
1.1.2.3VOD法不锈钢精炼工艺的现状和发展前景VOD法和AOD法几乎是同时投入工业性应用的。
在它们开始发展的前5年(截止1972年底),两者已建的装置数目大致相当(AOD法23套,VOD法22套)。
但1973年以后,AOD法发展迅速,而VOD法则相对发展迟缓。
究其原因,显然是AOD法原料适应性较强,投资及操作费用较低廉。
但近年来,随着超低碳、氮含量的超纯铁索体不锈钢的优异抗蚀性能和加工性能逐渐被人们认识,VOD法作为可生产超纯不锈钢的精炼手段,正日益受到广大冶金工作者的重视。
1.2VOD法不锈钢精炼工艺的计算机控制系统VOD炉计算机控制系统是VOD炉外耩炼的指挥中心。
通过该系统,控制电机驱动、阀门开闭、流量调节、真空度调整:监控阀门状态、压力、流量、温度;分析炉气中CO、C02含量变化和氧势变化[3】。
3运行调试过程中出现的警告信息和故障进行在线诊断。
通过sTEP7,可以方便的建立一个自动化解决方案【12】。
一般创建一个PLC自动化过程如图4.1所示。
rTr————_n』P麓檄i卜档r一一{..1..........,..』图4.1通过STEP7创建一个PLC项目的过程Fi94.1procedurecreatingaPLCproject硬件组态通过STEP7的Hardware完成,在硬件组态过程中主要完成以下工作:(1)组态PLC机架。
《计算机控制技术》课程中控制算法仿真平台设计【摘要】本文基于MATLAB建立了《计算机控制技术》课程控制算法仿真平台,通过友好的人机交互界面,实现控制算法的选择、参数的设置、动态仿真以及算法改进前后的控制效果对比等。
将抽象的理论知识变成直观的感性认识,使学生能更直观、高效地理解和掌握所学内容,培养学习兴趣和能力,取得了良好的教学效果。
【关键词】控制;算法;仿真0 引言《计算机控制技术》是工业电气自动化、自动控制、计算机应用等专业的主要专业课程之一[1]。
具有实践性和综合性强、课程抽象、学习难度大等特点。
尤其是其中的控制算法,既是计算机控制系统的核心,也是整个计算机控制系统设计中的难点,并且由于控制算法数量多,理论性强,采用常规的讲授方法,学生不易理解,教学效果不是很理想。
基于此,本文以MATLAB为工具,通过编写M文件、构建SIMULINK框图对主要算法进行仿真实现,并通过GUI (图形用户界面)设计友好的人机交互界面,实现控制算法的选择、参数的设置、动态仿真以及不同算法的控制效果对比等。
在建模仿真的过程中将抽象的理论知识变成直观的感性认识,使学生可以更直观、高效地理解和掌握所学知识,培养学生的学习兴趣和能力,提高教学质量。
1 仿真平台规划MATLAB是目前应用最广泛的科学工程运算软件,内嵌的SIMULINK是MATLAB的重要组件之一,无需大量的程序代码,只需建立仿真框图即可实现对复杂系统的交互式动态建模、仿真以及综合分析,令繁琐的仿真实现过程变得清晰可见。
MATLAB的M文件工作方式,可以将MATLAB的语言代码全部写在一个文本文件——M文件中运行,用户还可以根据需要自编一些函数,方便程序的修改与维护,提高代码的可重用性。
MATLAB GUI是MATLAB的图形用户界面开发环境[2],使用它,用户无需了解图形实现的细节内容,便可以绘制复杂的图形以及设计出美观、方便的菜单化和控件式的人机交互界面。
计算机控制三相笼型异步电动机直接启动控制点动控制两地控制系统设计计划书1.设计的原始资料及依据;三相笼型异步电动机启动时,电源电压全部加在定子绕组,这种启动方法,成为全压启动、也叫直接启动。
全压启动时,电动机的启动电流达到额定电流的4~7倍、容量较大的电动机的启动电流对电网具有大的冲击。
因此,这种启动方式主要用于小容量电动机的启动。
2.设计主要内容及要求;1、三相笼型异步电动机单向直接启动控制电路。
主电路由电源隔离开关QS、熔断器FU、接触器KM的主触电,热继电器FR的热元件与电动机M构成。
控制回路由启动按钮SB2、停止按钮SB1,接触器KM的线圈及其常开辅助触头,热继电器FR的常闭触头和熔断器FU2构成。
1)线路的工作原理启动时,合上QS,引入三相电源。
按下SB2,交流接触器KM的线圈通电,接触器主触头闭合,电动机接通电源直接启动运转。
同时与SB2并联的常开辅助触点KM闭合,使接触器线圈经两条路径通电。
这样,当SB2复位时,接触器KM的线圈仍可通过KM的辅助触头继续通电,从而保持电动机的连续运行。
这种依靠接触器自身辅助触头、而使其线圈保持通电的现象称为自锁。
这一对起自锁作用的辅助触头称为自锁触头。
要使电动机M停止运转,只要按下停止按钮SB1,将控制电路断开即可。
这时接触器KM断释放,KM的常开主触点将三相电源切断,电动机M停止运转。
当手松开按钮后,SB1的常闭触头在复位弹簧到原来的常闭状态,但接触器线圈已不能再靠自锁触头通电了,因为原来闭合的自锁触头已随着接触器线圈的断电而断开了。
(2)电路的保护环节1、熔断器FU作为电路短路保护环节2、热继电器FR作为电路短路保护环节3、欠电压保护与电压保护是依靠接触器本身的电磁机构来实现的。
当电源电压严重欠电压或失电压时,接触器的衔铁自行释放,电动机停止旋转。
而当电源电压恢复正常时,接触器线圈也不能自动通电,只有操作人员在次按下启动按钮SB2后,电动机才会启动。
微型计算机控制技术答案(赖寿宏)第二章输入输出接口技术和输入输出通道1.何谓I/O接口?在计算机控制系统中为什么要有I/O接口电路?答:是主机和外围设备之间交换信息的连接部件。
2.一个微处理机(CPU)采用程序控制查询方式时,管理50个键盘显示中断,要求将各终端打入的任一字符在显示器上立即显示出来。
已知CPU查询每个终端并完成每一字符的接收和处理时间需200μs,若程序员以每秒打10个字符的速度同时连续打入字符,问CPU是否能按要求,可靠的管理全部50个终端?又问CPU最多能管理多少个这种终端?答:1000ms/(200us*10)=500, 能可靠的管理全部50个终端3.在本章第二节,查询式I/O方式应用举例中,假设X、Y、Z三轴服务子程序的执行时间分别为100μs、150μs、120μs,主程序执行时间(执行查询指令等)为80μs,试估算不造成控制失误三轴所能达到的最高速度是多少?(速度以脉冲/s计算)答:27024.某微机实时控制系统有1#、2#、3#三个外围设备。
由一个CPU进行管理,已知各外围设备的最短响应时间和服务时间分别是:C1=5ms S1=300μsC2=8ms S2=1.3msC3=1ms S3=400μs问若采用查询方式是否能可靠管理这三个外围设备?为什么?若不行的话,试提出改进方答:不行。
可采用中断嵌套的方式解决。
6. 计算机与外围设备交换信息有哪几种控制方式?它们各有什么优缺点》答:见教材7. 某8086 最大模式系统中,需扩展8255A 、8253和DAC0832芯片各一片。
采用74LS138 译码器,若已指定给各芯片的地址范围是:8255A E0H、E2H、E4H、E6H、8253 E1H 、E3H、E5H、E7H、DAC0832 F0H试设计接口扩展的译码电路(除74LS138 外, 可增加必要的其他逻辑电路芯片。
8某8088最大模式系统中,需扩展8255A 四片,指定各芯片的地址范围分别是90~93H 、94~97H 、98~9BH 、9C~9FH, 采用74LS 译码器,试设计接口地址译码电路。
微型计算机控制技术结课论文(推荐五篇)第一篇:微型计算机控制技术结课论文微型计算机控制技术论文学院:信息科学与工程学院专业班级:电气1106班学号 : 0909112923 姓名:蒋颖指导老师:贺建军完成日期: 2014年5月4日计算机控制技术的应用与发展摘要:计算机控制技术作为一门日新月异的先进技术,其提供的整套数据采集和自动控制系统以高可靠性、易用性方便了农业、工业现场的使用。
在其基础上发展起来的网络化和现场总线技术又进一步促进了其发展。
计算机自动控制技术建立的系统可以显著提高企业的生产效益,使企业得以实现深层次的信息化,是目前满足我国自动化改造与创新发展的一个强大的动力。
关键字:计算机控制技术、农业、工业、应用现状、存在问题、发展方向一、计算机控制技术在工、农业生产中的应用1、工业生产对工业生产过程进行计算机控制是提高产品质量、降低成本、减少环境污染的必由之路, 计算机控制系统已成为生产设备及过程控制等重要的组成部分,它代替人的思维成为工业设备及工艺过程控制、产品质量控制的指挥和监督中心。
工业生产过程的计算机控制系统, 随着计算机的进步、工业生产工艺过程控制要求的提高和生产管理的完善而不断发展。
近年来计算机自动控制技术在我国工业中的发展非常迅速。
我国的许多大型企业、工厂由于在80、90年代引入国外生产设备和生产线,虽然扩大了生产能力,实现了生产自动化,但对生产中的数据采集和自动控制能力日益提出了新的要求。
以我国核燃料厂的HRL微机控制称重系统为例分析在工业现场环境中,如何引入计算机和自动控制技术,完成工业生产中各种预测和控制要求。
HRL微机控制称重系统,是给中国宜宾核燃料厂四车间称重装置开发的一套完整的计算机自动监测和控制系统。
本系统具有设置称重、实时控制称重数据采集、数据处理、报表打印、文件处理等多项功能。
它能够实时监视和控制现场称重与核燃料装管,显示称重情况,测量称重数据,并随时对工作中的异常情况作出报警,以便工作人员处理,另外,还能输入各种如放行号、芯块批号等信息,作日报表以备存档。
因为有两个水箱,所以把它分成两个部分来分别设计。
系统设计 1 上水箱液位的自动调节在这个部分中控制的是上水箱的液位。
系统原理图如图2-1所示。
单相泵正常运行,打开阀1和阀2,打开上水箱的出水阀,电动调节阀以一定的开度来控制进入水箱的水流量,调节 ...<P>因为有两个水箱,所以把它分成两个部分来分别设计。
<BR>系统设计<BR>1 上水箱液位的自动调节<BR>在这个部分中控制的是上水箱的液位。
系统原理图如图2-1所示。
单相泵正常运行,打开阀1和阀2,打开上水箱的出水阀,电动调节阀以一定的开度来控制进入水箱的水流量,调节手段是通过将压力变送器检测到的电信号送入中,经过A/D变换成数字信号,送入数字PID调节器中,经PID算法后将控制量经过D/A转换成与电动调节阀开度相对应的电信号送入电动调节阀中控制通道中的水流量。
<BR>当上水箱的液位小于设定值时,压力变送器检测到的信号小于设定值,设定值与反馈值的差就是PID调节器的输入偏差信号。
经过运算后即输出控制信号给电动调节阀,使其开度增大,以使通道里的水流量变大,增加水箱里的储水量,液位升高。
当液位升高到设定高度时,设定值与控制变量平衡,PID调节器的输入偏差信号为零,电动调节阀就维持在那个开度,流量也不变,同时水箱的液位也维持不变。
<BR>系统的控制框图如图3-1所示。
其中SP为给定信号,由用户通过计算机设定,PV为控制变量,它们的差是PID调节器的输入偏差信号,经过PLC的PID程序运算后输出,调节器的输出信号经过PLC的D/A转换成4~20mA的模拟电信号后输出到电动调节阀中调节调节阀的开度,以控制水的流量,使水箱的液位保持设定值。
水箱的液位经过压力变送器检测转换成相关的电信号输入到PLC的输入接口,再经过A/D转换成控制量PV,给定值SP与控制量PV经过PLC的CPU的减法运算成了偏差信号e ,又输入到PID调节器中,又开始了新的调节。
可编辑修改精选全文完整版第一章1.微型计算机控制系统的硬件由哪几部分组成?各部分作用?(1)主机:这是微型计算机控制系统的核心.通过接口它可以向系统的各个部分发出各种命令.同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程.按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作.根据运算结果作出控制决策;对生产过程进行监督.使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告.打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据.转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
(3)外部设备:这是实现微机和外界进行信息交换的设备.简称外设.包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
其中作台应具备显示功能.即根据操作人员的要求.能立即显示所要求的内容;还应有按钮.完成系统的启、停等功能;操作台还要保证即使操作错误也不会造成恶劣后果.即应有保护功能.(4)检测与执行机构:a.测量变送单元:在微机控制系统中.为了收集和测量各种参数.采用了各种检测元件及变送器.其主要功能是将被检测参数的非电量转换成电量.b.执行机构:要控制生产过程.必须有执行机构.它是微机控制系统中的重要部件.其功能是根据微机输出的控制信号.改变输出的角位移或直线位移.并通过调节机构改变被调介质的流量或能量.使生产过程符合预定的要求。
4、操作指导、DDC和SCC系统工作原理如何?它们之间有何区别和联系?(1)操作指导控制系统:在操作指导控制系统中.计算机的输出不直接作用于生产对象.属于开环控制结构。
计算机根据数学模型、控制算法对检测到的生产过程参数进行处理.计算出各控制量应有的较合适或最优的数值.供操作员参考.这时计算机就起到操作指导的作用(2)直接数字控制系统(DDC系统):DDC(Direct Digital Control)系统就是通过检测元件对一个或多个被控参数进行巡回检测.经输入通道送给微机.微机将检测结果与设定值进行比较.再进行控制运算.然后通过输出通道控制执行机构.使系统的被控参数达到预定的要求。
57www.eepw.com.cn 2003.3/下半月2002年美国国家半导体温度传感器设计大赛冠军得奖作品电子产品世界引言温度控制广泛应用于人们的生产和生活中,如大型饲养场、人工气候、无土栽培等许多场合。
在这些场合里,人们都用大量的温度计来采集温度。
我们知道计量工具大多需要定期校正(常规下一年或者半年校正一次)。
但是这些应用里的温度测量仪器一旦安装后,往往难以送到计量部门去校正。
因此,对温度控制工艺曲线的在线快速检测与校正就显得十分重要。
为此,作者采用PID控制技术开发了一套起计量传递作用的校正控制系统,以及一套全自动的PID参数测定与调整的温度分析系统。
系统硬件设计系统原理框图见图1,与常规A/D转换相比,此系统有以下优点:● LM35配合专用的V/F转换器,具有转换线性度好,精度较高,且便于利用单片机进一步提高测量精度;● 由于V/F变换本身是积分模式,所以抗干扰能力强;● 由于V/F变换输出是脉冲,易实现光电隔离;● 信号传输只占据一位数据口,接口方便,成本低;● 便于远距离传输,实现远程温度控制。
其次,在设计系统时,易于安排具有强电隔离、升降温控制、显示、报警、报数等功能电路。
因而,本系统可靠实用、唯一不足的是采集速度较慢,但对一般速度的温度控制而言,适当的设计仍能获得高精度的控制品质。
(1)测温和V/F变换电路见图2:传感器LM35的灵敏度为10mV/℃,适合与V-F专用芯片LM331配合使用。
信号直接从LM35输出端取样滤波后送到LM331进行V-F变换,并使200mV ̄1500mV对应200Hz ̄1500Hz。
为了使信号的抗干扰能力增强,在信号变换时进行了光电隔离。
为了提高测量精度,适应测量周期的要求,利用555基于LM35温度传感器的高精度恒温控制系统 A High Accuracy Temperature Control System Based on LM35华中科技大学 电信系 萧奋洛 涂仁发图1系统原理框图图2电压—频率变换电路582003.3/下半月 www.eepw.com.cn2002年美国国家半导体温度传感器设计大赛冠军得奖作品电子产品世界芯片对频率信号作了分频处理。