排种器性能试验步骤
- 格式:doc
- 大小:5.13 MB
- 文档页数:28

玉米精量播种装置排种性能电容法检测机理与方法研究摘要:本文研究了玉米精量播种装置排种性能检测的电容法检测机理与方法。
通过对样品放置于电容器中,使用交流电源激励电容器,通过测量电容的变化,得出了种子排放的情况。
本研究建立了电容法检测系统,进行了实验验证,并对系统的检测性能及优化提出了相关建议。
关键词:玉米精量播种装置;排种性能;电容法检测;检测机理;方法。
Ⅰ. 引言目前,玉米是我国重要的食品作物,其种植面积和产量在全球居于领先地位。
而种子作为农业生产中不可或缺的一环,种植玉米必然需要涉及到种子排放的问题。
传统的种子排放方式存在着排种数量不准、浪费种子、降低种植面积等问题。
为了解决这些问题,精量播种技术逐渐被农业工作者所采用。
但精量播种技术天然存在种子排放数量的不确定性,如何评估排种性能成为了研究的重点。
电容法作为一种广泛应用的非接触、非破坏性检测方法,已经在检测微小物体的位移、振动等方面得到了广泛的应用。
但是,电容法在种子排放方面的应用研究还非常有限。
因此,本研究主要从电容法的理论和实验出发,研究玉米精量播种装置排种性能的检测方法和机理,以期为玉米种植工作者提供可行和有效的检测方案,同时为电容法在种子排放方面的应用提供一定的借鉴价值,为今后的相关研究提供一定的参考。
Ⅱ. 相关研究电容法是一种检测物体位置和电容变化的方法,其工作原理是当两个导体电极之间间隔一定距离时,它们之间的电容大小与它们的距离和几何形状有关。
当物体穿过两个导电装置之间的间隔时,将会改变它们之间的电容大小,从而可以通过检测电容的变化来确定物体的位置和大小。
目前,电容法的应用领域广泛,包括电子工程、机械工程、生物医学和航空航天等领域。
在农业领域,电容法主要应用于农业物流和灌溉控制,用于检测粮食、饲料和种子的流量和质量等参数。
另外,还有少数研究将电容法应用于种子的检测,但是研究范围非常有限。
Ⅲ. 理论分析3.1 种子排放特点种子排放是指将种子从种植机中排出来的过程。

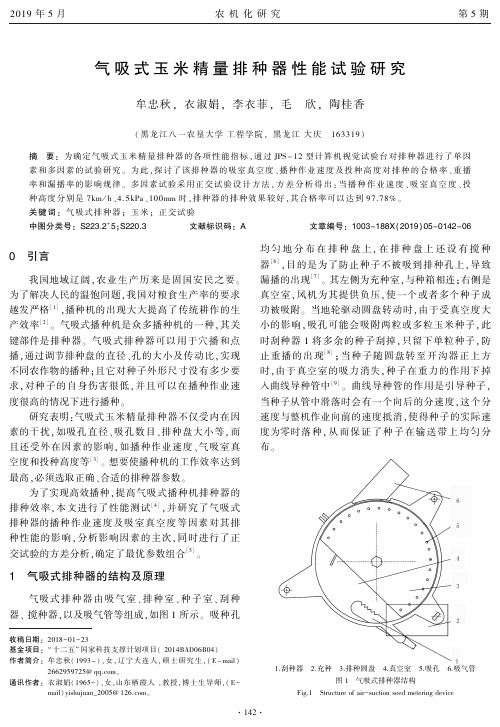
气吸式玉米精量排种器性能试验研究牟忠秋ꎬ衣淑娟ꎬ李衣菲ꎬ毛㊀欣ꎬ陶桂香(黑龙江八一农垦大学工程学院ꎬ黑龙江大庆㊀163319)摘㊀要:为确定气吸式玉米精量排种器的各项性能指标ꎬ通过JPS-12型计算机视觉试验台对排种器进行了单因素和多因素的试验研究ꎮ为此ꎬ探讨了该排种器的吸室真空度㊁播种作业速度及投种高度对排种的合格率㊁重播率和漏播率的影响规律ꎮ多因素试验采用正交试验设计方法ꎬ方差分析得出:当播种作业速度㊁吸室真空度㊁投种高度分别是7km/h㊁4.5kPa㊁100mm时ꎬ排种器的排种效果较好ꎬ其合格率可以达到97.78%ꎮ关键词:气吸式排种器ꎻ玉米ꎻ正交试验中图分类号:S223.2+5ꎻS220.3㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)05-0142-060㊀引言我国地域辽阔ꎬ农业生产历来是固国安民之要ꎮ为了解决人民的温饱问题ꎬ我国对粮食生产率的要求越发严格[1]ꎬ播种机的出现大大提高了传统耕作的生产效率[2]ꎮ气吸式播种机是众多播种机的一种ꎬ其关键部件是排种器ꎮ气吸式排种器可以用于穴播和点播ꎬ通过调节排种盘的直径㊁孔的大小及传动比ꎬ实现不同农作物的播种ꎻ且它对种子外形尺寸没有多少要求ꎬ对种子的自身伤害很低ꎬ并且可以在播种作业速度很高的情况下进行播种ꎮ研究表明:气吸式玉米精量排种器不仅受内在因素的干扰ꎬ如吸孔直径㊁吸孔数目㊁排种盘大小等ꎬ而且还受外在因素的影响ꎬ如播种作业速度㊁气吸室真空度和投种高度等[3]ꎮ想要使播种机的工作效率达到最高ꎬ必须选取正确㊁合适的排种器参数ꎮ为了实现高效播种ꎬ提高气吸式播种机排种器的排种效率ꎬ本文进行了性能测试[4]ꎬ并研究了气吸式排种器的播种作业速度及吸室真空度等因素对其排种性能的影响ꎬ分析影响因素的主次ꎬ同时进行了正交试验的方差分析ꎬ确定了最优参数组合[5]ꎮ1㊀气吸式排种器的结构及原理气吸式排种器由吸气室㊁排种室㊁种子室㊁刮种器㊁搅种器ꎬ以及吸气管等组成ꎬ如图1所示ꎮ吸种孔收稿日期:2018-01-23基金项目: 十二五 国家科技支撑计划项目(2014BAD06B04)作者简介:牟忠秋(1993-)ꎬ女ꎬ辽宁大连人ꎬ硕士研究生ꎬ(E-mail)2662959725@qq.comꎮ通讯作者:衣淑娟(1965-)ꎬ女ꎬ山东栖霞人ꎬ教授ꎬ博士生导师ꎬ(E-mail)yishujuan_2005@126.comꎮ均匀地分布在排种盘上ꎬ在排种盘上还设有搅种器[6]ꎬ目的是为了防止种子不被吸到排种孔上ꎬ导致漏播的出现[7]ꎮ其左侧为充种室ꎬ与种箱相连ꎻ右侧是真空室ꎬ风机为其提供负压ꎬ使一个或者多个种子成功被吸附ꎮ当地轮驱动圆盘转动时ꎬ由于受真空度大小的影响ꎬ吸孔可能会吸附两粒或多粒玉米种子ꎬ此时刮种器1将多余的种子刮掉ꎬ只留下单粒种子ꎬ防止重播的出现[8]ꎻ当种子随圆盘转至开沟器正上方时ꎬ由于真空室的吸力消失ꎬ种子在重力的作用下掉入曲线导种管中[9]ꎮ曲线导种管的作用是引导种子ꎬ当种子从管中滑落时会有一个向后的分速度ꎬ这个分速度与整机作业向前的速度抵消ꎬ使得种子的实际速度为零时落种ꎬ从而保证了种子在输送带上均匀分布ꎮ1.刮种器㊀2.充种㊀3.排种圆盘㊀4.真空室㊀5.吸孔㊀6.吸气管图1㊀气吸式排种器结构Fig.1㊀Structureofair-suctionseedmeteringdevice2㊀试验材料与方法2.1㊀试验材料与设备本试验选用的排种器型孔数为33孔ꎬ型孔分布圆直径为260mmꎮ试验研究对象选用先玉335玉米种子ꎬ试验前随机抽选250粒玉米种子ꎬ测量其尺寸特征ꎬ如表1所示ꎮ在其他影响因素不变的情况下ꎬ观察不同的播种作业速度㊁投种高度及真空度对排种的性能指标(合格率㊁漏播率㊁重播率)的影响[10]ꎮ本试验于2017年12月在土槽实验室进行ꎬ试验选择气吸式排种器[11]ꎬ测试设备采用JPS-12型试验台ꎬ其工作性能指标如表2所示ꎮ表1㊀玉米种子的尺寸参数Table1㊀Maizeparametersofcornseedmm㊀先玉335最大值平均值最小值标准值长度a12.469.947.070.85宽度b9.367.886.330.58厚度c8.565.243.850.93表2㊀JPS-12型试验台性能指标Table2㊀TheperformanceindicatorsofJPS-12meteringdeviceperformancetest-bed项目单位指标种床带速度km/h1.5~12排种轴转速r/min10~150种距测量精度mmʃ2气压动力kPa正压:0~35负压:-28~5配套动力kW7.45排种架调节范围上下:0~400mm倾斜:0ʎ~11ʎ2.2㊀试验方法试验过程中ꎬJPS-12型试验台模拟播种机的田间作业ꎬ传送带模拟种床[12]ꎮ试验台综合控制柜控制传送带运动ꎬ排种器㊁油泵及油刷固定不动ꎮ当传送带㊁排种轴㊁油泵以及风机都启动后ꎬ气吸式排种器把玉米种子投到运动着的传送带的油层上ꎬ被黏住的种子跟随传送带向前运动ꎬ从而测得种子粒距[13]ꎮ试验选取250粒玉米种子为统计样本ꎬ重复3次试验ꎬ最后的通过计算取平均值ꎮ排种数据的收集和处理完全由计算机视觉系统来完成ꎬ降低了人为误差的影响ꎮ试验指标要依据«GB/T6973-2005单粒(精密)播种机试验方法»ꎬ如果两粒种子之间的粒距ȡ1.5Xr(Xr为理论粒距)时为漏播ꎻ当粒距<0.5Xr时为重播ꎻ当粒距在0.5~1.5Xr之间时为合格[14]ꎮ2.3㊀单因素试验影响排种合格率的因素有很多ꎬ如投种高度㊁吸室真空度㊁播种作业速度㊁排种盘孔径及数量等[15]ꎮ在排种盘孔径以及孔数保持不变的情况下ꎬ研究不同投种高度㊁作业速度及真空度对其造成的影响ꎬ现场试验如图2所示ꎮ图2㊀现场试验图Fig.2㊀Testchart2.3.1㊀播种作业速度对排种质量的影响在吸室真空度和投种高度分别为4kPa和100mm的条件下ꎬ取不同的作业速度来检测排种器的性能ꎮ试验中选取9个作业速度依次为2㊁3㊁4㊁5㊁6㊁7㊁8㊁9㊁10km/hꎮ当JPS-12型试验台的各项因素都达到稳定状态时ꎬ选取250粒玉米种子作为样本ꎬ计算其各项指标的比例ꎬ试验结果如图3所示ꎮ图3㊀作业速度对排种性能的影响曲线Fig.3㊀Theeffectofworkingspeedontheperformanceofseedmetering由图3可知:作业速度对排种器的影响是使播种合格率先升高后降低ꎬ而对其他两个指标的影响正好相反ꎬ当播种的作业速度达到7km/h时ꎬ合格率最高ꎮ这种现象由于开始的播种速度太低ꎬ使得排种盘转速很低ꎬ在相同的真空度和高度时ꎬ吸种时间过长ꎬ所以导致重播率很高ꎬ合格率相比之下较低ꎻ当播种的作业速度达到最佳状态之后再继续升高时ꎬ种子所受的离心力就会变大ꎬ此时种子所需的负压也会变大ꎬ当真空度和高度一定时ꎬ种子由于排种盘转速太快而导致有的吸孔无种子就旋转过去ꎬ此时漏播现象就会出现ꎬ即漏播率升高ꎮ2.3.2㊀气吸室真空度对排种质量的影响在播种作业速度和投种高度分别为6km/h和100mm的条件下ꎬ取不同的真空度来检测排种器的性能ꎮ试验中选取9个真空度依次为2㊁2.5㊁3㊁3.5㊁4㊁4.5㊁5㊁5.5㊁6kPaꎮ当JPS-12型试验台的各项因素都达到稳定状态时ꎬ选取250粒玉米种子作为样本ꎬ计算其各项指标的比例ꎬ试验结果如图4所示ꎮ图4㊀吸室真空度对排种性能的影响曲线Fig.4㊀Theinfluencecurveofthevacuumdegreeofthesuctionchamberontheperformanceoftheseeding由图4可知:当播种作业速度和投种高度分别为6km/h和100mm时ꎬ在不同的真空度下得出:随着真空度的提高ꎬ合格率有先上升又下降的趋势ꎻ当吸室的真空度为4.5kPa左右时ꎬ作业的合格率最高ꎮ这种现象原因是当真空度过低时ꎬ种子自身的重力远远大于排种孔的吸附力ꎬ使得某些吸孔吸不到种子ꎬ从而导致的漏播变多ꎬ反之则重播变多ꎻ当吸室真空度达到一定值时ꎬ其重播率和漏播率会最低ꎬ这时其合格率会最高ꎬ达到最佳状态ꎮ2.3.3㊀投种高度对排种质量的影响投种高度是投种时间长短的重要参数之一ꎮ在播种作业速度和吸室真空度分别为6km/h和4kPa的条件下ꎬ取不同的投种高度来检测排种器的性能ꎮ试验中选取7个投种高度依次为100㊁150㊁200㊁250㊁300㊁350㊁400mmꎮ当JPS-12型试验台的各项因素都达到稳定状态时ꎬ选取250粒玉米种子作为样本ꎬ计算其各项指标的比例ꎬ试验结果如图5所示ꎮ图5㊀排种器高度对排种性能的影响曲线Fig.5㊀Influencecurveofseedheightonseedmeteringperformance由图5可以看出:当真空度为4kPa㊁播种作业速度为6km/h时ꎬ随着高度的增长ꎬ合格率明显下降ꎻ而另外两个指标都有上升的趋势ꎮ试验中ꎬ从传送带上种子的分布情况可以观察出:排种过程中种子不仅会受到外界空气阻力的干扰ꎬ而且导种管自身也会影响种子的路径ꎬ对排出的种子是否均匀产生一定影响ꎮ当投种高度越高时ꎬ种子受到外界的影响就会越大ꎬ此时排出的种子均匀性会差ꎮ因此ꎬ排种时应尽量选取适当的投种高度及适当的导种管长度ꎮ2.4㊀正交试验设计由上述的单因素试验数据处理分析得知:当作业速度在5~8km/h之间㊁吸室真空度在3.5~5kPa之间ꎬ投种高度在100~250mm之间时试验指标较好ꎮ为了进一步确定以上3种影响因素的主次及参数的最优组合ꎬ正交试验时选取播种作业速度㊁吸室真空度和投种高度设计3因素4水平的正交设计ꎬ如表3所示ꎮ本文选用L16(43)正交表ꎬ试验方案及试验结果如表4所示ꎮ试验结果如表5所示ꎮ表3㊀正交试验因素水平编码表Table3㊀Orthogonaltestfactorlevelcodetable水平ABC153.5100264150水平ABC续表3水平ABC374.5200485250表4㊀试验方案及试验结果Table4㊀Testschemeandresults试验序号作业速度A真空度B投种高度C合格率X/%重播率Y/%漏播率Z/%111182.995.0711.94212292.297.010.70313389.229.071.71414484.0315.740.23521285.313.4111.28522194.562.652.79723489.218.412.38824391.478.070.46931385.642.4511.911032486.625.757.631133197.780.981.241234293.135.281.591341479.3412.098.571442383.219.797.001543290.13.886.021644185.577.976.46㊀㊀由表5试验结果分析可知:播种作业速度A㊁吸室真空度B以及投种高度C影响排种合格率X的顺序为B>A>Cꎬ最优组合为B3A3C1ꎻ影响重播率Y的是B>A>Cꎬ最优组合为B3A3C1ꎻ影响漏播率Z的是C>B>Aꎬ最优组合为C4B1A4ꎮ根据以上分析以及综合考虑ꎬ最后得出本试验的最优因素组合为B3A3C1ꎮ试验结果:当播种作业速度㊁吸室真空度㊁投种高度分别为7km/h㊁4.5kPa㊁100mm时ꎬ试验的指标最好ꎬ即玉米的合格率是97.78%ꎬ重播率是0.98%ꎬ漏播率是1.24%ꎮ为了确定播种作业速度㊁吸室真空度以及投种高度对播种质量的影响程度ꎬ本文对试验得出的数据进行了方差分析ꎬ如表6所示ꎮ从表6的方差分析可以看出:在置信度为90%的情况下ꎬ播种作业速度和吸室真空度都对排种的3个指标呈显著状态ꎬ投种高度对重播率呈显著状态ꎬ说明这3个影响因素都对排种质量都有显著影响ꎮ表5㊀试验结果分析Table5㊀Analysisofexperimentresult指标ABC合格率/%K1348.53333.28360.9K2360.55356.68360.83K3363.17366.31349.54K4338.22354.2339.2k187.1383.3290.23k290.1489.1790.21k390.7991.5887.39k484.5688.5584.8极差Rk6.248.265.43因素主次B>A>C最优组合B3A3C1重播率/%K136.8923.0216.67K222.5425.2019.58K314.4622.3429.38K433.7337.0641.99k19.225.764.17k25.646.304.90k33.625.597.35k48.439.2710.50极差Rk5.613.686.33因素主次B>A>C最优组合B3A3C1漏播率/%K114.5843.7022.43K216.9118.1219.59K322.3711.3521.08K428.058.7418.81k13.6510.935.61k24.234.534.90k35.592.845.27k47.012.194.70Rk3.378.740.905因素主次C>A>B最优组合C4A1B4表6㊀方差分析Table6㊀Varianceanalysis指标差异源SSdfMSF显著性合格率A99.569333.1905.566∗∗B145.108348.3698.112∗∗C81.386327.1294.550∗误差e35.77865.963重播率A80.053326.68415.386∗∗B35.491311.8306.821∗∗C98.023332.67418.840∗∗误差e10.40661.734漏播率A27.10839.0361.050不显著B191.481363.8277.418∗∗C1.93630.6450.075不显著误差e51.62468.6043㊀结论1)当真空度和投种高度一定的情况下ꎬ随着播种作业速度的增加ꎬ排种器的合格率呈现上升趋势ꎬ到达7km/h时排种效果达到最佳ꎬ当继续增加播种的作业速度ꎬ排种效果又开始呈下降趋势ꎮ2)当播种作业速度和投种高度一定时ꎬ由于吸室负压的增大ꎬ排种器的排种精度呈上升的趋势ꎬ漏播率由于吸力变强而明显降低ꎬ但重播率此时也略有上升ꎮ当其数值达到4.5kPa时ꎬ播种效果相比之下最好ꎻ当吸室的真空度再继续上升后ꎬ排种的精度又明显变差ꎮ3)当播种作业速度和真空度不变时ꎬ随着种子下落高度的增加ꎬ排种器的精度呈现变差的现象ꎻ当种子下落的高度在100~250mm区间内时ꎬ排种器的精度较好ꎮ4)通过正交试验的方差分析得出:影响气吸式排种器性能的主要因素是吸室真空度ꎬ由spss软件数据分析得出了排种的最优组合为:作业速度㊁吸室真空度㊁投种高度分别是7km/h㊁4.5kPa㊁100mm时ꎬ玉米的合格率可高达97.78%ꎬ重播率㊁漏播率分别是0.98%㊁1.24%ꎮ参考文献:[1]㊀邹岚ꎬ卓杰强ꎬ杨仁全ꎬ等.我国玉米收获机发展前景分析[J].农机化研究ꎬ2008(4):205-208.[2]㊀安鹤峰.播种机的技术现状及发展趋势[J].农业科技与装备ꎬ2013(7):69-70ꎬ72.[3]㊀刘文忠ꎬ赵满全ꎬ王文明ꎬ等.气吸式排种装置排种性能理论分析与试验[J].农业工程学报ꎬ2010ꎬ26(9):133-138.[4]㊀王恒一ꎬ兰海涛ꎬ王晓勇.玉米精密播种机发展现状[J].农业科技与装备ꎬ2015(1):68-69.[5]㊀张毅.耕作机具部件仿生设计与研究[D].武汉:武汉理工大学ꎬ2002.[6]㊀卢勇涛ꎬ陈学庚ꎬ李亚雄.鸭嘴滚筒式气吸精量穴播器的设计与试验[J].中国农机化ꎬ2012(1):104-106ꎬ118. [7]㊀胡永文.气吸式排种装置在振动条件下的排种性能研究[D].呼和浩特:内蒙古农业大学ꎬ2011.[8]㊀张斌.萝卜气吸式精量播种机的设计[C]//中国农业工程学会(CSAE).中国农业工程学会2011年学术年会论文集ꎬ中国农业工程学会(CSAE)ꎬ2011.[9]㊀董润坚.水稻芽种排种器充种和投种过程的计算机仿真分析[D].长春:吉林农业大学ꎬ2005.[10]㊀钟陆明ꎬ陈学庚ꎬ温浩军ꎬ等.免耕播种机气吸式排种器影响因素的试验研究[J].农机化研究ꎬ2012ꎬ34(5):160-164.[11]㊀陈福德.玉米精密排种器排种性能的试验研究[D].呼和浩特:内蒙古农业大学ꎬ2012.[12]㊀胡永文ꎬ赵满全ꎬ刘月琴.气吸式排种装置试验台的设计与研究[J].农机化研究ꎬ2011ꎬ33(6):111-114. [13]㊀蔡卫国.种子精选分级试验台机构与控制方法研究[D].北京:中国农业大学ꎬ2005.[14]㊀王洪伟ꎬ史智兴ꎬ张晋国ꎬ等.倒挂式圆管气吸玉米免耕精播机的试验研究[J].山东农业大学学报:自然科学版ꎬ2016ꎬ47(5):720-725.[15]㊀翟建波.气力式水稻芽种精量穴直播排种器设计与试验研究[D].武汉:华中农业大学ꎬ2015.ExperimentalStudyonthePerformanceofAir-suctionCornPrecisionSeedingMuZhongqiuꎬYiShujuanꎬLiYifeiꎬMaoXinꎬTaoGuixiang(CollegeofEngineeringꎬHeilongjiangBayiAgriculturalUniversityꎬDaqing163319ꎬChina)2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期Abstract:Inordertounderstandtheperformanceindexesoftheairsuctiontypecornactuatorꎬthesinglefactorandmulti-factorexperimentalstudywerecarriedoutthroughthejps-12computervisiontestbench.Theinfluenceofthevaccmde ̄greeꎬseedingspeedandheightoftheseedingdeviceontheyieldꎬreseedingrateandseepageratewereinvestigated.Multi-factorexerimentusingorthogonalexperimentdesignmethodꎬanalysisofvariance:whhenplantingoperationspeedꎬvacu ̄umsuctionchamberꎬthrowheightis7km/hꎬ4.5kpaꎬ100mmꎬtherowofkindofeffectisgoodꎬthequalifiedratecanreach97.78%.Keywords:air-suctionseedmeteringdeviceꎻcornꎻorthogonaltest(上接第136页)AbstractID:1003-188X(2019)05-0133-EATheDesignoftheControlSystemofRiceLiveBroadcastingBasedonSowingControlModelZhangShuyanꎬZhangWenyiꎬQiBingꎬJiYaoꎬYuShanshanꎬLiKun(NanjingResearchInstituteofAgriculturalMechanizationꎬMinistryofAgricultureꎬNanjing210014ꎬChina)Abstract:Riceprecise-drillmachinecanreducethelaborintensityꎬincreaseefficiencyandimprovethequalityofso ̄wingꎬtheidealseedingeffectistheemergenceofaconsistentanduniformꎬthereforeꎬitputsforwardhigherrequirementsonprecisionofseeding.Forthispurposeꎬacontrolsystembasedonsowingcontrolmodelisdesigned.Inthispaperꎬthemathematicalmodelofricesowingquantityanditsinfluencefactorswasestablishedbyexperimentꎬanditwasusedasthecorebasisofcontrolsowing.ThePLCcontrolleristhecoreꎬhallspeedsensorsignalreal-timedetectthespeedofma ̄chineꎬPLCcontrolonthespeedwhichisbasedonthesowingcontrolmodel.Workingparameterscanbereal-timedis ̄playedonthetouchscreen.Thispapercanprovidesthebasisofriceprecise-drillmachine.Keywords:riceꎻsowingꎻcontrolmodelꎻcontrolsystem(上接第141页)AbstractID:1003-188X(2019)05-0137-EADesignandSimulationAnalysisofTwo-stageConicalHelicalSugarcaneSupportMechanismSongChunhua1ꎬOuYinggang2(1.GuangdongCommunicationPolytechnicꎬGuangzhou510800ꎬChinaꎻ2.CollegeofEngineeringꎬSouthChinaAgricul ̄turalUniversityꎬGuangzhou510642ꎬChina)Abstract:Inordertostudytheworkingperformanceofsugarcanesupportmechanismandoptimizethestructuralparame ̄terdesignofcanesupportdeviceꎬakinematicsmodelwasestablished.ByusingSOLIDWORKSꎬavirtualprototypeoftwo-stageconicalscrewcanesupportmechanismwasdesigned.ThekinematicsandmechanicssimulationtestswerecarriedoutbyusingADAMSsimulationtoolꎬandthehigh-speedphotographytestwasalsocarriedout.Theresultsshowthatsug ̄arcanedoesnotfallintherangeof30ʎ-60ʎꎬinwhichtheangleofinstallationis60ʎꎬthehighestpointofcaneis4.1secondsꎬandtheefficiencyisthehighestꎬandwhentheangleofhelicalinclinationis45ʎꎬthesugarcaneissubjectedtotheforceofspiralbladeevenly.Theeffectiverangeofpitchis270mm-290mmꎬandwhenthepitchis285mmꎬthestressandliftarethemoststableꎬandtheliftingeffectisthebest.Keywords:canesupportmechanismꎻinstallationangleꎻhelicalinclinationangleꎻpitch。

气力导轨式花生精量排种器的设计及试验气力导轨式花生精量排种器的设计及试验引言:随着农业技术的进步和人们对农田作物的需求逐渐增加,高效的农业机械设备对于提高农田作物种植效率和农民收益至关重要。
花生作为重要的油料作物和食品作物,在全球范围内都有广泛的种植。
然而,传统的花生种植方法存在人工操作不精确、效率低下的问题。
因此,本文提出了一种气力导轨式花生精量排种器的设计及试验,旨在提高花生种植的精度和效率。
设计方案:1. 设计思路:基于传统精量排种器的不足之处,我们提出了一种新的设计方案,即气力导轨式花生精量排种器。
该设计利用气压驱动机械装置,通过导轨的精确控制,使得花生种子能够准确排放到指定的位置,从而提高排种精度。
2. 设计要素:气力驱动装置、导轨系统、种子供给系统和控制系统是本设计的主要要素。
其中,气力驱动装置通过控制气压的大小和方向来驱动种子的排放,导轨系统则起到引导种子排放的作用。
种子供给系统负责将种子输送到导轨系统,而控制系统则监测和调节整个系统的运行状态。
3. 设计细节:在气力驱动装置中,我们采用了气缸、气压传感器和电磁阀来实现对气压的控制。
导轨系统则由导轨、滑轨和支撑器组成,确保种子在排放过程中保持精准的位置。
为了保证种子的供给量和稳定性,种子供给系统采用了震动盘和输送带的组合方式。
控制系统则包括控制器和监测装置,用于监测和控制整个系统的运行状态。
4. 材料选择:在设计过程中,我们选用了高强度、耐磨损的材料来增强系统的稳定性和耐用性。
同时,为了减小系统的重量和体积,我们选用了轻质合金材料。
试验结果:通过对气力导轨式花生精量排种器进行试验,我们得到了如下结果:1. 排种精度高:由于导轨系统的精确控制,花生种子的排放位置准确无误,有效提高了排种精度。
2. 种子利用率高:排种过程中,种子的量和速度可调,确保了种子的充分利用和良好的发芽率。
3. 作业效率高:相比于传统的人工排种方式,气力导轨式花生精量排种器能够高效地完成种子排放任务,节约了时间和人力成本。

单粒播种机(精密播种机)》试验方法gb6973―86本标准参照采用国际标准iso7256/1―1984《播种机械―试验方法―第1部分:单粒播种机(精密播种机)》,并结合我国实际情况制订。
采用本标准可使不同型式的单粒(精密)播种机的试验结果有可比性。
1适用范围本标准适用于于单粒高精度播种机性能试验和生产试验。
2术语定义2.1单粒高精度播种机将种子单粒地按精确的粒距与播深播入种沟并覆土的播种机。
2.2播种单体通常由排种装置和开沟覆土装置等工作部件共同组成。
2.3排在种器将种子单粒地排入播行内的装置。
2.4开沟覆土装置通常包含一个开沟器、开沟深度调节装置及种子全面覆盖装置。
2.5开沟器在土壤中开出种沟并承接排种器排出的种子的工作部件。
2.6排种量排在种器在单位时间内排泄种子的数量或质量。
2.7播种量单位播行长度或单位播种面积内播入的种子数量或质量。
2.8粒距播出行内相连两粒种子中心在播行中心线上的投影距离称作粒距。
播种机设计时(采用说明书)规定的粒距称作理论粒距(调整粒距)。
2.9漏播理论上应该播一粒种子的地方而实际上没有种子者,谓之漏播。
统计计算时,凡种子粒距大于1.5倍理论粒距者,称为漏播。
2.10重播理论上必须播出一粒种子的地方而实际上萌发了两粒或多粒者,谓之重播。
统计数据排序时,凡种子粒距大于或等同于0.5倍理论粒距者,泛称为重播。
3试验条件3.1播种机3.1.1提供试验的播种机应符合产品技术条件,试验前应测定样机的技术状态和主要零件的实际尺寸,将测定数据分别记入表1和表2。
3.1.2样机试验应遵循使用说明书的下述要求:a.播种机的最大和最小前进速度,以m/s表示;b.排种器的最小和最轻输出功率或线速度,以r/min或m/s则表示;c.播种机适用于的种子类型;d.收割每种种子适用于的排种器。
3.2种子3.2.1种子类型播种机试验时应采用使用说明书所要求的种子。
3.2.1.1单用途播种机如果播种机标明适用于于收割某一类型种子,并适用于于相同的收割方式,则试验应当按采用说明书规定的种子类型和收割方式展开。

于佳杨,卢彩云,卫如雪,等.基于离散元法的小麦精量排种器性能模拟试验[J].江苏农业科学,2018,46(8):225-228.doi:10.15889/j.issn.1002-1302.2018.08.057基于离散元法的小麦精量排种器性能模拟试验于佳杨1,2,3,卢彩云2,3,卫如雪2,3,付兴兰1,2,3,李 科1,唐兆家1,王凤花1(1.昆明理工大学现代农业工程学院,云南昆明650500;2.国家农业信息化工程技术研究中心,北京100097;3.国家农业智能装备工程技术研究中心,北京100097) 摘要:针对小麦精量播种技术缺乏合适的排种器的问题,设计1种窝眼轮式小麦精量排种器。
采用离散元仿真软件EDEM对排种器结构参数进行数值模拟并进行仿真试验,仿真分析型孔倒角类型、清种刷安装角度和排种轮转速3个因素对排种器排种性能的影响。
仿真试验结果表明,当排种轮转速为50r/min,型孔倒角类型为倒边角,清种刷安装角度为35°时,排种器工作性能最好;当型孔倒角类型为倒边角,清种刷安装角度为35°时,随着排种轮转速的增加,型孔重复充种数减少,型孔漏充种子数增加,总排种量减少,各排种管排种量的变异系数呈增加趋势。
关键词:窝眼轮式;小麦精量排种器;离散元仿真;结构参数 中图分类号:S223.2+3 文献标志码:A 文章编号:1002-1302(2018)08-0225-04收稿日期:2016-11-01基金项目:国家重点研发计划(编号:2016YFD0200607);安徽省科技重大专项(编号:15CZZ03134)。
作者简介:于佳杨(1991—),男,吉林临江人,硕士研究生,主要从事农业机械方面的研究。
E-mail:yujiayang0327@qq.com。
通信作者:王凤花,博士,副教授,主要从事农业机械方面的研究。
E-mail:158877172@qq.com。
小麦精量播种是余松烈院士提出的小麦种植方式,较传统小麦种植方式增产10%以上。
农业机械学实验指导书农机教研室主编黑龙江八一农垦大学工程学院2005.4前言本实验指导书是依据农业机械学教学大纲和实验大纲要求,为达到教学目的和要求而编写的。
通过实验教学培养学生的动手能力和创新能力,加强学生基本技能的训练,培养学生运用所学知识和技能解决生产实践中有关问题能力。
要求学生牢固掌握和深入理解每个实验基本原理,熟悉仪器和掌握实验方法,养成独立操作和分析能力;通过实验操作过程和指标测定,进一步了解所测定指标的实际使用意义和实践操作技能;通过实验教学要求学生有强烈的事业心,热爱农机事业,应用所学的理论知识解决实际中存在的问题。
实验中要认真、仔细,爱护公共财产,并能严格遵守课堂纪律,注意安全,以保证顺利完成每个实验。
学时分配:本课程总学时为60学时,其中实验8学时教学形式:实验前要求学生预习实验内容。
实验课上指导教师讲解实验的基本原理、方法及操作的使用,指导学生独立完成具体实验过程、完成实验报告。
实验性质:操作和测定性实验。
根据学生在实验中的表现及实验完成操作完成情况打分,结合实验报告情况综合评分。
实验成绩单独记分,作为本课程的一部分。
实验一 排种器性能试验及播量调整一、目的与要求1. 掌握48行谷物条播机的播量调整原理和方法。
2. 掌握排种器排种能力,均匀度、均齐度的测定方法。
二、原理与方法1. 播量调整原理是通过改变槽轮在排种杯内有效工作长度和槽轮转速来调整播量的。
槽轮在排种盒内的伸出长度,称为槽轮的有效工作长度。
对于播种机总播量的调整,工作中可轴向移动排种轴,改变槽轮的工作长度,以调节整台播种机的播量,一般要求总播量误差在±4%,最大不超过10%;对于排种器单体的播量调节是通过调整单个外槽轮在排种杯内的长度而改变播量的,一般要求单个排种器排种误差在±1%,最大不超过4%。
2. 排种器性能实验是播种作业前检查排种器工作质量的重要手段。
通过排种器性能实验可以检查总播量稳定性,排种一致性,条播均匀性等性能指标。