RoboMasters2016全国机器人大赛比赛规则V3.0
- 格式:pdf
- 大小:1.30 MB
- 文档页数:37
2016 Robocon 赛事规则Translated by Qichang Sun 术语与定义(用于ABU Robocon 2016 曼谷比赛)1.比赛程序和任务一旦比赛开始,每支队伍都需按照以下顺序完成任务。
1.1设置机器人1.1.1比赛开始前有一分钟准备时间1.1.2每队最多有三人可以参与设置机器人,维修人员不能参与准备过程。
1.1.3 Any teams that fail to complete setting of the robots within one minute can1.2比赛开始时机器人和参赛选手的部署1.2.1 H机器人必须在规定的出发区11.2.2 E机器人必须在规定的出发区。
风动扇叶必须被放置在E机器人上。
可以放置在机器人的任何部位。
1.3斜坡和高地1.3.1 H机器人从规定出发区1出发。
E机器人携带风动扇叶在自己的出发区等待。
H机器人需要简介驱动E机器人,例如使用风力或磁力等。
H机器人要远程驱动E机器人越过三个斜坡和高地。
1.3.2H机器人允许伸展至斜坡和高地上方来接近E机器人,但是禁止触碰E机器人和场地。
1.4H机器人需从远程驱动区间接地驱动E机器人。
E机器人携带扇叶在Z型河道巡航并完全进入河道后的高地。
1.5E机器人利用重力从高地滑下。
允许H机器人从外部使其减速或控制其运动。
E机器人需携带扇叶沿斜坡滑下完全进入风力发电站。
1.6在风电站,H机器人将扇叶从E机器人上完全取下。
1.7H机器人自动爬上风力发电装置顶端组装好整套装置。
1.7.1若H机器人从出发后就是全自动的,H机器人允许取下扇叶后立即攀爬。
1.7.2若H机器人在之前的任务中由操作手操纵,H机器人在从E机器人上取下扇叶后需移动至出发区2。
1.7.2.1在裁判的允许下,H机器人需由手动模式转为自动模式。
模式转换需在出发去2内完成。
在切换模式时选手可以进入场地接触H机器人。
1.7.2.3一旦H机器人切换为自动模式,整场比赛它就不允许再切换回手动模式。
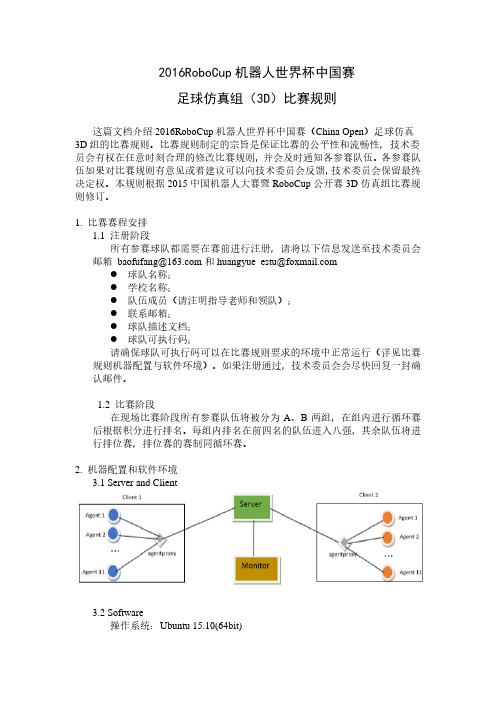
2016RoboCup机器人世界杯中国赛足球仿真组(3D)比赛规则这篇文档介绍2016RoboCup机器人世界杯中国赛(China Open)足球仿真3D组的比赛规则。
比赛规则制定的宗旨是保证比赛的公平性和流畅性,技术委员会有权在任意时刻合理的修改比赛规则,并会及时通知各参赛队伍。
各参赛队伍如果对比赛规则有意见或着建议可以向技术委员会反馈,技术委员会保留最终决定权。
本规则根据2015中国机器人大赛暨RoboCup公开赛3D仿真组比赛规则修订。
1. 比赛赛程安排1.1 注册阶段所有参赛球队都需要在赛前进行注册,请将以下信息发送至技术委员会邮箱baofufang@和huangyue_estu@●球队名称;●学校名称;●队伍成员(请注明指导老师和领队);●联系邮箱;●球队描述文档;●球队可执行码;请确保球队可执行码可以在比赛规则要求的环境中正常运行(详见比赛规则机器配置与软件环境)。
如果注册通过,技术委员会会尽快回复一封确认邮件。
1.2 比赛阶段在现场比赛阶段所有参赛队伍将被分为A、B两组,在组内进行循环赛后根据积分进行排名。
每组内排名在前四名的队伍进入八强,其余队伍将进行排位赛,排位赛的赛制同循环赛。
2. 机器配置和软件环境3.1 Server and Client3.2 Software操作系统:Ubuntu 15.10(64bit)仿真环境:Simspark 0.2.4, Rcssserver3D 0.6.103. 最新修订规则根据2016 RoboCup世界杯3D仿真组组织委员会对于规则的修改,特增订如下规则:1.在球门发球时,若发球方出现乌龙球,对手方将获得一次角球机会而不是直接得分。
2.同往年规则一样,开球直接进球不得分,对手方将获得一次球门发球的机会,而不是以往的开球机会。
特别的,为了促进RoboCup3D仿真项目在中国的发展,我们决定参照RoboCup世界杯的Free/Scientific Challenge设置一个全新的项目交流赛。

机器人大赛比赛规则机器人大赛比赛规则一.比赛主题“夺宝奇兵”。
每个人心中都有梦想,梦想对于每个人都是无价之宝,但是真正去实现自己的梦想,必须去靠我们的智慧和勇气去努力拼搏。
过程中纵然会有艰难险阻,会有重重迷雾,只要我们有冷静的头脑,有缜密的分析,有持之以恒的精神,面对挑战的勇气,我们并定会找到属于我们的宝物,实现自己的人生梦想。
让我们用我们制作的机器人去帮助我们夺取宝物,实现我们人生中的科技梦想。
本次比赛的主题为“夺宝奇兵”。
机器人的任务就是经过艰难险阻夺取宝物。
过程中机器人需穿过复杂地形,途中读取条形码,根据提取到的关键信息判定藏有机关的密室,通过寻磁方式找到机关控制器,关闭机关,然后从多个物体中识别出宝物密钥,将密钥推到开关区,最后抵达宝物密室,触发开关,表示成功夺取宝物。
二.场地说明参考场地如下图:1.比赛场地:长600cm,宽300cm,场地四周围有高5cm的挡板。
地板基本平整,场地左右两边镜像对称,表面材料为:白色免漆板。
场地中铺有黑色引导线,宽度为5cm。
一些地方设有交叉线标记位置,宽度5cm,长20cm。
2.启动区(图中标号[1]区)分红、蓝两区,分别由红线和蓝线圈定,双方机器人各占一个启动区,具体颜色由开赛前抽签决定。
机器人需在启动区识别场上开赛声音信号(一定频率的声音信号,持续一段时间后停止,声音开关由裁判长控制),自动开始比赛。
3.跷跷板(图中标号[2]区)面积:160cm×50cm,高度:30cm跷跷板中间有黑色引导线,板两端与地面平滑衔接,在跷跷板前10cm处有交叉线提示位置。
跷跷板中间有交叉线提示位置,交叉线长度同跷跷板宽度。
机器人需在跷跷板上停留一段时间,在20秒内使跷跷板两端同时离开地面的时间尽可能长,期间可多次通过跷跷板,取最长停留时间。
若最长停留时间不足20秒则比赛结束时在总完成时间上累加缺少时间的4倍。
4.解码区(图中标号[3]区)在黑色引导线两侧分别有一段总长度25cm、宽度10cm和总长度25cm、宽度20cm的条形码(后者为两个场地共用),距离引导线10cm。



机器人大赛规则解释l RoboCup足球机器人仿真组(2D、3D)仿真组比赛类似FIFA系列足球游戏,比赛由程序自主控制,完全模拟真人比赛,可设定阵形、战术、体力消耗等一系列参数。
比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
l RoboCup足球机器人小型组比赛在5.5m×4m的绿色地毯场地上进行,采用桔黄色的高尔夫球作为比赛用球,每队由5个机器人组成。
机器人的体积不超过180cm2,高度不超过150mm。
机器人拥有控球、击球装置,可以和赛场外的计算机进行无线通信。
比赛规则与一般足球相似,有点球、任意球、门球、犯规、红黄牌等,上下半场各10 分钟。
l RoboCup足球机器人中型组(2:2 4:4)中型组比赛分为每队2个和每队4个机器人两种不同类型,使用橙色的国际足联标准5号用球,上下半场各10分钟。
机器人的尺寸不超过0.5m×0.5m ×0.8m,在比赛过程中完全自主控制。
l RoboCup足球机器人四腿组四腿机器人足球赛统一使用Sony公司生产的“爱宝”(AIBO)机器狗作为比赛专用机器人,比赛在4.2m×2.8m的绿色场地上进行。
比赛双方各有四个机器人上场,上下半场各10分钟,队员之间可以进行无线通讯,但禁止任何形式的远程控制,从而保证每一支球队都是一个独立系统。
l RoboCup足球机器人类人组比赛以各队自己开发的人形机器人作为比赛专用机器人,分为规定动作部分和自由发挥部分。
规定动作包括单腿站立一分钟、行走、踢球、点球比赛等,自由发挥部分,每队有5分钟时间展示机器人的各个动作,由裁判从技术和艺术两方面进行评分。
l RoboCup救援组比赛“灾难营救”是个重要的社会议题,机器人营救项目在模拟的事故现场寻找及营救受害者,分仿真组和机器人组两个组别。
旨在激发研究创意,使得机器人可以取代人力,在恶劣的环境下进行营救工作。
robomaster规则【实用版】目录1.RoboMasters 简介2.RoboMasters 规则概述3.RoboMasters 规则详细解析4.RoboMasters 规则的实际应用正文【RoboMasters 简介】RoboMasters 是由大疆创新主办的一项机器人竞赛,旨在促进机器人教育、研究和产业的发展。
自 2015 年创办以来,RoboMasters 已经吸引了全球数百所高校和研究机构的参与,成为机器人领域的一项盛事。
【RoboMasters 规则概述】RoboMasters 的规则分为自动射击、手动射击、机械臂、机器人自行走、视觉识别等多个方面。
参赛队伍需要设计、制造并操作自己的机器人来完成比赛任务。
比赛任务包括攻击敌方机器人、防御己方机器人以及完成各种障碍和挑战。
【RoboMasters 规则详细解析】1.自动射击:机器人需要搭载自动射击装置,通过感应器识别目标并自动射击。
射击装置的种类包括电磁炮、气动炮、弹射器等。
2.手动射击:手动射击需要操作员通过遥控器控制机器人搭载的射击装置,对敌方机器人进行攻击。
操作员需要具备精准的射击技巧和敏捷的反应速度。
3.机械臂:机械臂是机器人的重要组成部分,可以用来抓取物品、攻击敌方机器人等。
机械臂的设计和控制算法对机器人的性能至关重要。
4.机器人自行走:机器人需要具备自主行走能力,以便在比赛中快速移动和调整位置。
机器人的行走方式包括轮式、履带式、腿式等。
5.视觉识别:视觉识别是机器人在比赛中识别目标和环境的重要手段。
参赛队伍需要开发视觉算法,使机器人能够快速准确地识别目标并作出相应动作。
【RoboMasters 规则的实际应用】RoboMasters 规则的设计不仅考验了参赛队伍的机器人制造和控制能力,还对团队的战术策略和协作精神提出了较高要求。
在比赛中,参赛队伍需要根据规则不断优化自己的机器人,提高其在各种任务中的表现。
全国大学生机器人大赛RoboMasters2017机器人对抗赛规则更新说明(V1.0)鉴于目前《全国大学生机器人大赛RoboMasters2017机器人对抗赛规则》正处于最后的研发论证阶段,尚有部分内容不宜提前发布。
但为方便各参赛队伍尽早了解新赛季的规则方向,进而开展备赛的各项工作,组委会先行发布《规则更新说明V1.0》,对新赛季规则中,现已既定的内容进行解释说明。
同时,2017赛季规则主体将在《RoboMasters2016全国机器人大赛比赛规则V4.5》基础上进行更新完善,请首次参赛的队伍先行查阅参考2016赛季规则。
1.赛事信息“RM2017对抗赛”规则赛事部分更新如下:指导教师增加内容:“在参赛期间,指导教师须积极配合组委指导老师职责增加。
2.规则及机器人2.1获胜条件,以优先级排序:第一优先级:对方基地摧毁,比赛立即结束,己方获得胜利;第二优先级:对方除基地外的机器人全部摧毁,比赛立即结束,己方获得胜利;第三优先级:比赛时间到基地剩余血量高获胜;第四优先级:如果基地血量相同,全队机器人剩余总血量高获胜。
2.2机器人及规则登岛或者登岛取弹分发给其他机器人,以及维13信道组网通信。
公路直通两个启动区的平路。
2障碍放置区放置障碍物的地方。
2大符机关神符视觉识别打击,攻击力增强。
2升级为新版,大符顶部显示随机数,大符九宫格图案变为随机变化数字,依次输入顶部显示随机数,成功后激活大符。
加弹机构定时给补给站发放弹丸。
2 定时发放弹丸。
障碍物放置在障碍区,阻挡敌方进入。
30 克制打完大符攻击基地。
资源立柱每方远端的停机立柱,飞机占领后全队每秒恢复一定血量。
2立柱四周有装甲,一定时间内击中补血停止。
战损效果基地顶部装甲受到攻击,底盘断电若干秒,底盘运动受限。
该效果侧重于受打击时的效果呈现,类似于电竞中的“冰冻效果”。
注:具体比赛规则以官方最新发布的正式版《比赛规则手册》为准。
全国大学生机器人大赛RoboMasters组委会2016年9月30日。
2016世界机器人大赛介绍2016世界机器人大赛包括无人驾驶挑战赛、机器人明星挑战赛、国际水中机器人大赛、RoboCup挑战赛、无人机飞行极限挑战赛等多项科技含量高、学科跨度宽、参与面广和展示性强的机器人赛事。
大赛将汇集全球顶尖参赛队伍,在同一个舞台演绎科技挑战与创新激情。
大赛赛事组成2016世界机器人大赛-无人驾驶挑战赛2016世界机器人大赛-无人机飞行极限挑战赛2016世界机器人大赛-国际水中机器人大赛2016世界机器人大赛-临港荷福机器人明星挑战赛2016世界机器人大赛-RoboCup挑战赛2016世界机器人大赛-RoboCom青少年挑战赛无人驾驶挑战赛2016世界机器人大赛-无人驾驶挑战赛(以下简称:挑战赛),地点设在紧邻机器人大会主会场的露天区域或分会场。
挑战赛以推动产业应用为目的,面向所有无人驾驶研发机构、院校、企业,围绕无人驾驶技术的实际道路行驶、创新应用、基本性能进行比拼,最终将按照4S,即:安全性(Safety)、智能(Smartness)、平稳性(Smoothness)和速度(Speed)标准给出无人驾驶智能车辆完成任务的成绩。
比赛时间:2016年10月21-24日地点:2016世界机器人大会现场无人机飞行极限挑战赛“2016世界机器人大赛--无人机飞行极限挑战赛”融科技性、竞技性和观赏性于一体,总决赛和颁奖典礼将于2016年10月在北京“2016世界机器人大会”现场举行。
总决赛阶同期举办无人机发展论坛和无人机展览,是一场世界性的、代表当前最高水平的无人机盛会。
赛事分为预选赛和总决赛,每个竞赛项目,由评委会在预选赛阶段评选出10支优胜团队,10强团队于10月21-23日在“2016世界机器人大会”现场进行总决赛,最终决出冠、亚、季军得主。
比赛时间:2016年10月21-23日地点:2016世界机器人大会现场国际水中机器人大赛“2016世界机器人大赛--国际水中机器人大赛”以智能仿生机器鱼为主体,在水中进行各类竞赛,包括产业类项目及科研类项目,比如石油管道巡检、海陆空联合救援、海参捕捞、水球竞赛、花样游泳等。