基于Matlab的凸轮型线设计与研究
- 格式:pdf
- 大小:1.04 MB
- 文档页数:3
基于MATLAB和C++ Builder平台的发动机凸轮型线仿真
设计方法研究
褚超美;李兆建;吴佐铭
【期刊名称】《内燃机工程》
【年(卷),期】2009(030)002
【摘要】针对发动机凸轮型线设计开发中计算工作量大,参数优选过程复杂的问题,研究并开发了以 MATLAB作为数值计算引擎,C++ Builder作为应用程序混合编程的发动机凸轮型线设计平台,实现了凸轮型线设计过程中方便、快捷、计算精确的目标,对几种典型凸轮型线的设计应用表明,该系统均能满足各型线特征参数优选设计的要求,并已在产品设计开发中得到了实际应用.
【总页数】5页(P69-72,77)
【作者】褚超美;李兆建;吴佐铭
【作者单位】上海理工大学,机械工程学院,上海,200093;上海理工大学,机械工程学院,上海,200093;上海理工大学,机械工程学院,上海,200093
【正文语种】中文
【中图分类】TK413.4
【相关文献】
1.基于C++ BUILDER和MATLAB的电动汽车仿真软件的接口技术研究 [J], 程飞;过学迅;别辉
2.基于Matlab与DSP Builder的2PSK调制解调器设计与仿真 [J], 李鹏飞;李金
平;陆小菊;赵欣
3.基于Matlab和Visual C++的惯导误差仿真方法研究 [J], 陈永冰;陈绵云;谢纯乐;李文魁
4.基于C++ Builder和Matlab实现天线方向图可视化软件的设计 [J], 王勋志;王玲丽
5.基于Matlab和C++ Builder的数字滤波仿真实现 [J], 林知明;杨高波
因版权原因,仅展示原文概要,查看原文内容请购买。
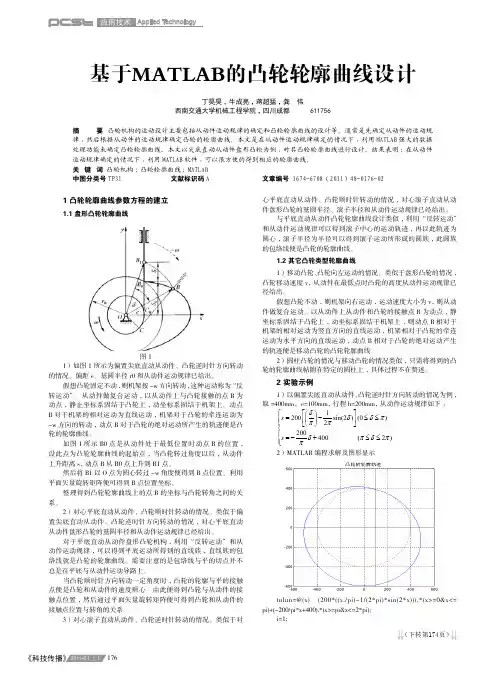
基于MATLAB软件的凸轮轮廓曲线设计摘要:以偏置移动从动件盘形凸轮为例,基于MATLAB软件对凸轮轮廓曲线进展了解析法设计.绘制出轮廓曲线。
运行结果说明:在从动件运动规律确定的情况下,利用MATLAB软件以很方便、快捷地得到凸轮的轮廓曲线。
关键词:凸轮机构;凸轮轮廓曲线;MATLAB;解析法前言凸轮轮廓曲线的设计,一般可分为图解法和解析法.利用图解法能比拟方便地绘制出各种平面凸轮的轮廓曲线.但这种方法仅适用于比拟简单的构造,用它对复杂构造进展设计那么比拟困难,而且利用图解法进展构造设计,作图误差较大,对一些精度要求高的构造不能满足设计要求。
解析法可以根据设计要求,通过推导机构中各局部之间的几何关系,建立相应的方程,准确地计算出轮廓线上各点的坐标,然后把凸轮的轮廓曲线准确地绘制出来.但是,当从动件运动规律比拟复杂时,利用解析法获得凸轮的轮廓曲线的工作量比拟大.而MATLAB软件提供了强大的矩阵处理和绘图功能,具有核心函数和工具箱.其编程代码接近数学推导公式,简洁直观,操作简易,人机交互性能好,且可以方便迅速地用三维图形、图像、声音、动画等表达计算结果、拓展思路[1]。
因此,基于MATLAB软件进展凸轮机构的解析法设计,可以解决设计工作量大的问题。
本文基于MATLAB软件进展凸轮轮廓曲线的解析法设计,利用?机械原理?课程的计算机辅助教学,及常用机构的计算机辅助设计.其具体方法为首先准确地计算出轮廓线上各点的坐标,然后运用MATLAB绘制比拟准确的凸轮轮廓曲线。
1 设计的意义与条件1.1意义凸轮机构是由具有曲线轮廓或凹槽的构件,通过高副接触带动从动件实现预期运动规律的一种高副机构,它广泛地应用于各种机械,特别是自动机械、自动控制装置和装配生产线中,是工程实际中用于实现机械化和自动化的一种常用机构。
所以,在凸轮的加工中,准确确实定凸轮的轮廓,这对于保证凸轮所带动从动件的运动规律是尤为重要的。
1.2条件偏置移动从动件盘形凸轮设计条件〔图1〕:凸轮作逆时针方向转动,从动件偏置在凸轮轴心的右边从动件在推程作等加速/等减速运动,在回程作余弦加速度运动基圆半径rb = 40 mm,滚子半径rt = 10mm,推杆偏距e = 15 mm,推程升程h = 50 mm,推程运动角ft = 100度,远休止角fs = 60度回程运动角fh = 90度,推程许用压力角alp = 35度。
基于MATLAB的高次多项式凸轮型线优化设计
何振俊;李雪峰
【期刊名称】《机械科学与技术》
【年(卷),期】2008(027)010
【摘要】动力凸轮型线的设计十分重要,以高次多项式凸轮型线为例,在基于丰满系数和磨损设计多目标函数情况下,利用MATLAB及其优化工具箱(optimization toolbox)对目标函数数学模型进行优化求解.应用MATLAB的优化函数提供的强大计算功能,确定了凸轮型线高次五项式函数中的系数,并能快速找到目标函数的优化值.显著提高了型线优化设计的速度和精度,还可根据实际情况灵活地调整权重系数W1和W2的值的大小,计算方便快捷.在与传统设计方法比较结果表明,经优化设计,提高了动力凸轮的丰满系数,降低了凸轮型线的磨损.
【总页数】4页(P1141-1144)
【作者】何振俊;李雪峰
【作者单位】西北工业大学自动化学院,西安,710072;江苏南通市广播电视大学,南通,226006;江苏南通市广播电视大学,南通,226006
【正文语种】中文
【中图分类】TK402
【相关文献】
1.基于MATLAB的柴油机凸轮型线拟合优化设计研究 [J], 杨建坤
2.高次多项式凸轮型线特性参数对配气机构性能影响的研究 [J], 郭磊;褚超美;陈家
琪
3.高次多项式非对称高速车用柴油机配气凸轮型线设计 [J], 付光琦;高文志;康秀玲;祖炳锋;徐玉梁;唐良才;郭凌崧
4.高次多项式动力凸轮优化设计及MATLAB算法实现 [J], 詹樟松;杨正军;刘兴春
5.基于高次多项式动力凸轮型线的配气机构性能分析 [J], 杜爱民;梁伟
因版权原因,仅展示原文概要,查看原文内容请购买。
微型汽车发动机凸轮型线仿真优化设计及应用研究本文旨在探讨微型汽车发动机凸轮型线的仿真优化设计及其应用研究。
微型汽车发动机是一种小型、轻量化的发动机,具有体积小、重量轻、功率高、燃油经济性好等优点。
在内燃机领域中,微型汽车发动机获得了广泛的应用和研究。
凸轮是微型汽车发动机中的关键部件,控制着气门的开关和气门升程,直接影响发动机的性能。
凸轮型线的合理设计对发动机性能具有重要影响。
本文对微型汽车发动机凸轮型线进行仿真优化设计并进行了应用研究。
具体研究过程如下:一、凸轮型线的建模在仿真优化设计过程中,首先需要建立凸轮型线的数学模型。
本文采用MATLAB软件进行建模,绘制凸轮型线的曲线图并进行数据处理。
通过示波器观察发动机工作过程中气门的开关情况,得到气门开启和关闭的时刻,并将这些数据转换成MATLAB软件中的离散点数据。
二、凸轮型线的仿真优化设计在建立好凸轮型线的数学模型之后,本文采用遗传算法对凸轮型线进行仿真优化设计。
遗传算法是一种模仿自然进化机制的优化算法,通过模拟进化过程来搜索最优解。
将凸轮形状参数作为遗传算法的“基因”,设置适应度函数来衡量凸轮性能,不断演化优化得到最优解。
三、凸轮型线的应用研究通过仿真优化设计,本文得到了一组优化后的凸轮型线参数,再将这些参数应用于实际微型汽车发动机中,进行燃烧室压力测量和性能测试。
实验结果显示,优化后的凸轮型线可以明显提升发动机的输出功率和燃油经济性。
综上所述,通过对微型汽车发动机凸轮型线的仿真优化设计及应用研究,本文取得了一定的研究成果。
在未来的研究中,可以进一步探究凸轮型线的优化方案,并将其应用于更广泛的内燃机领域中,为内燃机的发展提供有价值的参考。
进一步探究凸轮型线的优化方案,可以从以下几个方面进行研究:一、不同工况下的凸轮型线优化不同工况下发动机对凸轮型线的要求不同,因此凸轮型线的优化也需要根据不同工况进行制定。
比如,在高速运转状态下,发动机需要更高的输出功率,因此凸轮型线的参数需要针对高负荷、高转速的要求进行优化。
基于matlab的凸轮计算>> r=10;>> r0=50;>> e=0;>> delt0=120*pi/180;>> h=50;>> i=100;>> s0=sqrt(r0^2-e^2);>> syms delt1 delt2 delt3;>> s1=h*((delt1/delt0)-sin(2*pi*delt1/delt0)/(2*pi)); >> v1=diff(s1);>> a1=diff(s1,2);>> s2=h*(2+sin(2*pi*delt2/delt0)/(2*pi)-(delt2/delt0)); >> v2=diff(s2);>> a2=diff(s2,2);>> delt1=linspace(0,delt0,i);>> delt2=linspace(delt0,240*pi/180,i);>> delt3=linspace(240*pi/180,2*pi,i);>> s3=0*delt3;>> delt=[delt1 delt2 delt3];>> s11=subs(s1,delt1);>> v11=subs(v1,delt1);>> a11=subs(a1,delt1);>> s22=subs(s2,delt2);>> v22=subs(v2,delt2);>> a22=subs(a2,delt2);>> s=[s11 s22 s3];>> v=[v11 v22 s3];>> a=[a11 a22 s3];>> plot(delt*180/pi,s,delt*180*pi,v,'-.',delt*180/pi,a,'--');>> title('凸轮位移,速度,加速度曲线');>> legend('位移曲线','速度曲线','加速度曲线');>> axis([0 360 -80 80]);>> grid on>> for j=1:3*ixx(j)=(s0+s(j))*sin(delt(j))-e*cos(delt(j));yy(j)=(s0+s(j))*cos(delt(j))+e*sin(delt(j));end>> for m=1:3*isyms deltxyx=(s0+s(m))*sin(deltxy)+e*cos(deltxy);y=(s0+s(m))*cos(deltxy)-e*sin(deltxy);sx=diff(x,deltxy)/(sqrt((diff(x,deltxy))^2+(diff(y,deltxy))^2));cx=diff(y,deltxy)/(sqrt((diff(x,deltxy))^2+(diff(y,deltxy))^2));deltxy=delt(m);ax(m)=subs(sx,deltxy);bx(m)=subs(cx,deltxy);xxx(m)=xx(m)-r*bx(m);yyy(m)=yy(m)-r*ax(m);endfigure>> plot(xxx,yyy)>> grid on>> title('凸轮实际轮廓曲线');>> cave=[xxx;yyy;0*xxx-5];>> fprintf('%10.6f',cave)0.000000 40.000000 -5.000000 1.269243 39.991388 -5.000000 2.538018 39.966909 -5.000000 3.806015 39.928587 -5.000000 5.073092 39.878420 -5.000000 6.339275 39.818364 -5.000000 7.604751 39.750315 -5.000000 8.869863 39.676091 -5.000000 10.135100 39.597420 -5.000000 11.401095 39.515925 -5.000000 12.668608 39.433108 -5.000000 13.938519 39.350338 -5.000000 15.211816 39.268838 -5.000000 16.489581 39.189678 -5.000000 17.772978 39.113760 -5.000000 19.063237 39.041812 -5.000000 20.361640 38.974382 -5.000000 21.669506 38.911829 -5.000000 22.988173 38.854322 -5.000000 24.318985 38.801835 -5.000000 25.663272 38.754145 -5.000000 27.022336 38.710835 -5.000000 28.397436 38.671291 -5.000000 29.789767 38.634708 -5.000000 31.200450 38.600093 -5.000000 32.630511 38.566270 -5.000000 34.080872 38.531891 -5.000000 35.552332 38.495438 -5.000000 37.045557 38.455237 -5.000000 38.561065 38.409469 -5.000000 40.099216 38.356180 -5.000000 41.660201 38.293294 -5.000000 43.244034 38.218627 -5.000000 44.850541 38.129905 -5.000000 46.479357 38.024773 -5.000000 48.129916 37.900818 -5.000000 49.801452 37.755579 -5.000000 51.492993 37.586571 -5.000000 53.203358 37.391297 -5.000000 54.931164 37.167264 -5.000000 56.674820 36.912008 -5.000000 58.432535 36.623105 -5.000000 60.202321 36.298187 -5.000000 61.981998 35.934966 -5.000000 63.769205 35.531242 -5.000000 65.561403 35.084926 -5.000000 67.355891 34.594048 -5.000000 69.149813 34.056777 -5.000000 70.940171 33.471432 -5.000000 72.723841 32.836494 -5.000000 74.497584 32.150618 -5.000000 76.258063 31.412642 -5.000000 78.001860 30.621598 -5.000000 79.725490 29.776719 -5.000000 81.425420 28.877443 -5.000000 83.098087 27.923421 -5.000000 84.739914 26.914517 -5.000000 86.347331 25.850814 -5.000000 87.916791 24.732613 -5.000000 89.444787 23.560431 -5.000000 90.927876 22.334999 -5.000000 92.362689 21.057259 -5.000000 93.745954 19.728360 -5.000000 95.074508 18.349647 -5.000000 96.34531916.922660 -5.000000 97.555495 15.449119 -5.000000 98.702302 13.930915 -5.000000 99.783179 12.370102 -5.000000100.795745 10.768880 -5.000000101.737815 9.129583 -5.000000102.607408 7.454669 -5.000000103.402758 5.746697 -5.000000104.122316 4.008319 -5.000000104.764763 2.242259 -5.000000105.329010 0.451300 -5.000000105.814201 -1.361736 -5.000000106.219718 -3.194005 -5.000000106.545177 -5.042653 -5.000000106.790431 -6.904840 -5.000000106.955562 -8.777752 -5.000000107.040882-10.658618 -5.000000107.046925-12.544727 -5.000000106.974436-14.433446 -5.000000106.824372-16.322227 -5.000000106.597882-18.208630 -5.000000106.296303-20.090331 -5.000000105.921147-21.965134 -5.000000105.474084-23.830985 -5.000000104.956934-25.685979 -5.000000104.371648-27.528371 -5.000000103.720293-29.356583 -5.000000103.005038-31.169209 -5.000000102.228137-32.965021 -5.000000101.391911-34.742971 -5.000000100.498728-36.502197 -5.000000 99.550994-38.242018 -5.000000 98.551128-39.961937 -5.000000 97.501545-41.661638 -5.000000 96.404646-43.340982 -5.000000 95.262794-45.000000 -5.000000 95.262794-45.000000 -5.000000 94.077722-46.638540 -5.000000 92.848837-48.255106 -5.000000 91.575076-49.847744 -5.000000 90.255505-51.414382 -5.000000 88.889338-52.952839 -5.000000 87.475945-54.460840 -5.000000 86.014863-55.936028 -5.000000 84.505807-57.375980 -5.000000 82.948676-58.778223 -5.000000 81.343563-60.140244 -5.000000 79.690755-61.459517 -5.000000 77.990742-62.733508 -5.000000 76.244218-63.959702 -5.000000 74.452080-65.135612 -5.000000 72.615433-66.258803 -5.00000070.735581-67.326904 -5.000000 68.814030-68.337626 -5.000000 66.852480-69.288782 -5.000000 64.852821-70.178297 -5.000000 62.817124-71.004227 -5.000000 60.747632-71.764774 -5.000000 58.646752-72.458299 -5.000000 56.517044-73.083332 -5.000000 54.361205-73.638590 -5.000000 52.182062-74.122982 -5.000000 49.982551-74.535624 -5.000000 47.765709-74.875841 -5.000000 45.534653-75.143179 -5.000000 43.292567-75.337411 -5.000000 41.042683-75.458537 -5.000000 38.788266-75.506791 -5.000000 36.532596-75.482641 -5.000000 34.278950-75.386788 -5.000000 32.030586-75.220167 -5.000000 29.790723-74.983939 -5.000000 27.562529-74.679493 -5.000000 25.349097-74.308435 -5.000000 23.153435-73.872583 -5.000000 20.978450-73.373958 -5.000000 18.826928-72.814773 -5.000000 16.701525-72.197424 -5.000000 14.604753-71.524474 -5.000000 12.538966-70.798644 -5.000000 10.506349-70.022795 -5.000000 8.508912-69.199916 -5.000000 6.548474-68.333103 -5.000000 4.626665-67.425549 -5.000000 2.744911-66.480521 -5.000000 0.904434-65.501344 -5.000000 -0.893750-64.491384 -5.000000 -2.648838-63.454030 -5.000000 -4.360234-62.392674 -5.000000 -6.027553-61.310693 -5.000000 -7.650616-60.211434 -5.000000 -9.229446-59.098191 -5.000000-10.764265-57.974193 -5.000000-12.255484-56.842582 -5.000000-13.703698-55.706402 -5.000000-15.109673-54.568580 -5.000000-16.474341-53.431914 -5.000000-17.798784-52.299057 -5.000000-19.084223-51.172507 -5.000000-20.332006-50.054594 -5.000000-21.543592-48.947468 -5.000000-22.720536-47.853097 -5.000000-23.864474-46.773252 -5.000000-24.977110-45.709505 -5.000000-26.060194-44.663222 -5.000000-27.115508-43.635563 -5.000000-28.144852-42.627476 -5.000000-29.150023-41.639701 -5.000000-30.132800-40.672768 -5.000000-31.094928-39.727000 -5.000000-32.038102-38.802521 -5.000000-32.963951-37.899254 -5.000000-33.874024-37.016935 -5.000000-34.769774-36.155117 -5.000000-35.652545-35.313181 -5.000000-36.523561-34.490347 -5.000000-37.383912-33.685683 -5.000000-38.234547-32.898120 -5.000000-39.076261-32.126466 -5.000000-39.909689-31.369417 -5.000000-40.735297-30.625575 -5.000000-41.553381-29.893465 -5.000000-42.364059-29.171544 -5.000000-43.167267-28.458227 -5.000000-43.962764-27.751896 -5.000000-44.750126-27.050921 -5.000000-45.528751-26.353673 -5.000000-46.297861-25.658546 -5.000000-47.056505-24.963968 -5.000000-47.803568-24.268420 -5.000000-48.537777-23.570450 -5.000000-49.257709-22.868689 -5.000000-49.961799-22.161864 -5.000000-50.648356-21.448813 -5.000000-51.315569-20.728494 -5.000000-51.961524-20.000000 -5.000000-51.961524-20.000000 -5.000000-52.584515-19.262731 -5.000000-53.183972-18.516841 -5.000000-53.759626-17.762665 -5.000000-54.311222-17.000538 -5.000000-54.838511-16.230804 -5.000000-55.341258-15.453805 -5.000000-55.819237-14.669890 -5.000000-56.272235-13.879410 -5.000000-56.700049-13.082719 -5.000000-57.102488-12.280172 -5.000000-57.479371-11.472129 -5.000000-57.830530-10.658953 -5.000000-58.155807 -9.841005 -5.000000-58.455057 -9.018654 -5.000000-58.728147 -8.192267 -5.000000-58.974953 -7.362213 -5.000000-59.195366 -6.528864 -5.000000-59.389287 -5.692594 -5.000000-59.556628 -4.853775 -5.000000-59.697316 -4.012785 -5.000000-59.811287 -3.169998 -5.000000-59.898489 -2.325793 -5.000000-59.958886 -1.480547 -5.000000-59.992448 -0.634639 -5.000000-59.999161 0.211554 -5.000000-59.979022 1.057652 -5.000000-59.932040 1.903277 -5.000000-59.858237 2.748049 -5.000000-59.757644 3.591592 -5.000000-59.630308 4.433528 -5.000000-59.476285 5.273479 -5.000000-59.2956436.111071 -5.000000-59.088465 6.945927 -5.000000-58.8548437.777675 -5.000000-58.594880 8.605942 -5.000000-58.3086949.430357 -5.000000-57.996413 10.250552 -5.000000-57.658176 11.066160 -5.000000-57.294134 11.876815 -5.000000-56.904452 12.682155 -5.000000-56.489302 13.481819 -5.000000-56.048872 14.275449 -5.000000-55.583357 15.062690 -5.000000-55.092966 15.843191 -5.000000-54.577920 16.616601 -5.000000-54.038447 17.382574 -5.000000-53.474791 18.140768 -5.000000-52.887202 18.890843 -5.000000-52.275944 19.632464 -5.000000-51.641291 20.365298 -5.000000-50.983526 21.089019 -5.000000-50.302944 21.803301 -5.000000-49.599849 22.507825 -5.000000-48.874557 23.202276 -5.000000-48.127392 23.886344 -5.000000-47.358687 24.559721 -5.000000-46.568788 25.222107 -5.000000-45.758047 25.873205 -5.000000-44.926828 26.512723 -5.000000-44.075503 27.140376 -5.000000-43.204451 27.755883 -5.000000-42.314065 28.358968 -5.000000-41.404741 28.949362 -5.000000-40.476887 29.526799 -5.000000-39.530917 30.091022 -5.000000-38.567257 30.641778 -5.000000-37.586335 31.178820 -5.000000-36.588593 31.701909 -5.000000-35.574476 32.210810 -5.000000-34.544438 32.705296 -5.000000-33.498939 33.185144 -5.000000-32.438449 33.650141 -5.000000-31.363441 34.100079 -5.000000-30.274397 34.534755 -5.000000-29.171804 34.953975 -5.000000-28.056156 35.357552 -5.000000-26.927951 35.745306 -5.000000-25.787695 36.117062 -5.000000-24.635898 36.472654 -5.000000-23.473075 36.811923 -5.000000-22.299747 37.134717 -5.000000-21.116440 37.440893 -5.000000-19.923681 37.730312 -5.000000-18.722007 38.002845 -5.000000-17.511953 38.258370 -5.000000-16.294062 38.496774 -5.000000-15.068879 38.717948 -5.000000-13.836952 38.921795 -5.000000-12.598833 39.108223 -5.000000-11.355075 39.277148 -5.000000-10.106235 39.428495 -5.000000 -8.852872 39.562197 -5.000000 -7.595547 39.678193 -5.000000 -6.334823 39.776431 -5.000000 -5.071264 39.856868 -5.000000 -3.805435 39.919467 -5.000000 -2.537903 39.964201 -5.000000 -1.269236 39.991049 -5.000000 -0.000000 40.000000 -5.000000>>。
基于MATLAB汽车发动机配气凸轮的型线设计与接触应力分析MATLAB是一款功能强大的工程计算软件,被广泛应用于各个领域。
在汽车工业中,MATLAB可以用来进行发动机配气凸轮的型线设计和接触应力分析。
本文将详细介绍MATLAB在汽车发动机配气凸轮设计中的应用。
汽车发动机配气凸轮是发动机中重要的构件之一,它负责控制气门的开合以调节进出气量,影响整个发动机的性能。
因此,设计一款合理的配气凸轮是非常重要的工作。
在实际设计中,需要考虑凸轮曲线的连续性、尺寸和形状等,并通过模拟和分析来评估其性能和强度。
MATLAB提供了丰富的函数和工具箱,可以用来进行凸轮曲线的设计和分析。
其中,MATLAB的Symbolic Math Toolbox可以用来进行符号计算,求解形式化的数学问题,包括曲线的导数和积分等。
同时,MATLAB的Simscape Multibody可以用来进行动力学仿真和接触分析。
对于配气凸轮的设计,首先需要确定凸轮的基本参数,如凸轮半径、凸轮角度等。
然后,可以根据相应的曲线算法生成凸轮曲线。
接着,可以使用MATLAB的Symbolic Math Toolbox来求解曲线的导数和积分,以计算凸轮曲线的切线和法线。
最后,根据切线和法线的数据,可以绘制出凸轮曲线图像。
接下来是接触应力分析。
在凸轮和气门接触时,会产生接触应力。
为了更好的评估凸轮的强度,需要进行接触应力分析。
可以使用MATLAB的Simscape Multibody进行动力学仿真和接触分析。
首先,需要将凸轮和气门模型导入到模拟环境中,并设置相应的初始参数。
然后,在模拟过程中,MATLAB会计算出接触应力,生成相应的分析报告。
总之,MATLAB在汽车发动机配气凸轮的设计中是非常实用的工具。
通过使用MATLAB的Symbolic Math Toolbox和Simscape Multibody,可以快速、准确地进行凸轮型线设计和接触应力分析,为发动机的性能和强度评估提供有力支持。
下面我们来简单地介绍一下怎么样用matlab来绘制凸轮的工作轮廓线主要涉及解析法首先看一下理论轮廓线的方程式X=(S0+S1)sinθ+ ecosθY= (S0+S1) cosθ+ esinθ式中,e为偏心距,S0=sqrt(r0^2-e^2),r0为偏心圆半径只要在matlab的函数编辑中,输入一下代码即可我已经在程序中写了很详细的备注了,希望大家都能看懂附程序:%先设置凸轮的基本参数,偏心距离e,基圆半径rb,滚轮半径rr,角速度w,推杆上升的最大行程h。
h=30;w=12;rb=50;e=12;rr=10;s0=sqrt(rb*rb-e*e);% 偏心距e=12,基圆rb=50,滚轮半径rr=10,角速度w=12,最大上升h=30q=120*pi/180;%这里我规定推程运动角为120度qs=(120+30)*pi/180;%远休止角为150度q1=(120+30+150)*pi/180;%回程运动角为300度for i=1:1:120 %将120度按1度均分,从而得到各个度数上的轮廓坐标qq(i)=i*pi/180.0;s1=(h*qq(i)/q)-(h/(2*pi))*sin(2*pi*qq(i)/q);v1=w*(h/q)-(w*h/q)*cos(2*pi*qq(i)/q);x(i)=(s0+s1)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i));%理论轮廓线的坐标a(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i)); %cos(i)b(i)=(s0+s1)*sin(qq(i))-e*cos(qq(i)); %sin(i)xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));%实际工作轮廓线的坐标endfor i=121:1:150qq(i)=i*pi/180;s2=h;v2=0;x(i)=(s0+s2)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i));b(i)=(s0+s2)*sin(qq(i))-e*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=151:1:300qq(i)=i*pi/180;qq1(i)=qq(i)-150*pi/180;s3=h-h*qq1(i)/(q1-qs);v3=-w*h/(q1-qs);x(i)=(s0+s3)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i));b(i)=(s0+s3)*sin(qq(i))-e*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=301:1:360qq(i)=i*pi/180;x(i)=(s0+0)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+0)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+0)*cos(qq(i))-e*sin(qq(i));b(i)=(s0+0)*sin(qq(i))-e*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i)); endplot(x,y,'r',xx,yy,'g')%用plot函数绘制曲线text(0,20,'理论轮廓线')%理论轮廓线的坐标位于为(0,20)text(65,40,'实际轮廓线')%实际轮廓线的坐标位于(65,40)hold on附图:。
班级:姓名:教号:之阳早格格创做鉴于matlab的凸轮表面安排一、安排凸轮机构的意思正在工业死产中,时常央供呆板的某些部件依照确定的准确门路疏通,仅应用连杆机构已易以谦脚那个央供,所以需要利用处事表面具备一定形状的凸轮.凸轮正在所有基础疏通链中,具备易于安排战能准确预测所爆收的疏通的便宜.如果安排其余机构去爆收给定的运功、速度、战加速度,其安排处事是很搀纯的,然而是安排凸轮机构则比较简单,而且疏通准确、灵验.所以正在许多呆板中,如纺织机、包拆机、自效果床、自动化博用机床、数控机床、印刷机、内焚机、修筑板滞、矿山板滞、估计机的辅帮拆备及农业机具等,皆不妨找到凸轮机构.正在举止钻研时,先安排一个简朴的凸轮,正在给定的转化角度内有一定的总降距.安排凸轮表面的基础要领是把凸轮牢固,使从动件以其与凸轮的相闭位子绕凸轮回转而产死凸轮表面.果此安排凸轮时,必须画出脚够多的面,使凸轮表面仄滑稳当.Matlab硬件提供了强盛的矩阵处理战画图功能,具备核心函数工具箱.其编程代码靠近数教推导公式,简净直瞅,支配浅易,人机接互本能佳.果此,鉴于matlab硬件举止凸轮机构的安排不妨办理安排处事量大的问题.使用剖析法举止安排,matlab不妨透彻的估计出表面上每一面的坐标,而后更为透彻的画造出凸轮表面直线.两、安排凸轮机构的已知条件凸轮干顺时针目标转化,从动件偏偏置正在凸轮轴心左边.从动件正在推程干等加/减速疏通,正在回程干余弦加速疏通.基圆半径rb=50mm,滚子半径rt=10mm,推杆偏偏距e=10mm,推程降程h=50mm,推程疏通角ft=100º,近戚止角fs=60º,回程疏通角fh=90º.三、分解估计1、修坐坐标系以凸轮轴心为坐标本面修坐仄里直角坐标系XOY,与杆件降高目标为Y轴正目标.2、推杆疏通顺序估计凸轮疏通一周可分为5个阶段:推程加速阶段、推程减速阶段、近戚止阶段、回程阶段、进戚止阶段.根据已知条件,推程阶段为等加/减速,故推程阶段的疏通圆程为:推程加速阶段(0~)推程减速阶段()近戚止阶段()推杆疏通圆程为根据已知条件,正在回程干余弦加速疏通,果此回程阶段()的疏通圆程为近戚止阶段)的疏通圆程为3、凸轮表里表面线估计式中,为推杆滚子核心到X轴的笔直距离.4、本质表面线估计根据3的估计截止有可得凸轮本质表面线为四、步调代码rb = 50;rt = 10;e = 10;h = 50;ft = 100;fs = 60;fh = 90;hd= pi / 180;du = 180 / pi;se=sqrt( rb^2 e^2 );d1 = ft + fs;d2 = ft + fs + fh;n = 360;s = zeros(n);ds = zeros(n);x = zeros(n);y = zeros(n);dx = zeros(n);dy = zeros(n);xx = zeros(n);yy = zeros(n);xp = zeros(n);yp = zeros(n);for f = 1 : nif f <= ft/2s(f) = 2 * h * f ^ 2 / ft ^ 2; s = s(f);ds(f) = 4 * h * f * hd / (ft * hd) ^ 2; ds = ds(f);elseif f > ft/2 & f <= fts(f) = h 2 * h * (ft f) ^ 2 / ft ^ 2; s = s(f);ds(f) = 4 * h * (ft f) * hd / (ft * hd) ^ 2; ds = ds(f); elseif f > ft & f <= d1s = h;ds = 0;elseif f > d1 & f <= d2k = f d1;s(f) = .5 * h * (1 + cos(pi * k / fh)); s = s(f);ds(f)= .5 * pi * h * sin(pi * k / fh) / (fh * hd); ds = ds(f);elseif f > d2 & f <= ns = 0;ds = 0;endxx(f) = (se + s) * sin(f * hd) + e * cos(f * hd); x = xx(f);yy(f) = (se + s) * cos(f * hd) e * sin(f * hd); y = yy(f);dx(f) = (ds e) * sin(f * hd) + (se + s) * cos(f * hd); dx = dx(f);dy(f) = (ds e) * cos(f * hd) (se + s) * sin(f * hd); dy = dy(f); xp(f) = x + rt * dy / sqrt(dx ^ 2 + dy ^ 2);xxp = xp(f);yp(f) = y rt * dx / sqrt(dx ^ 2 + dy ^ 2);yyp = yp(f);enddisp ' 凸轮转角表里x 表里y 本质x 本质y'for f = 10 : 10 :ftnu = [f xx(f) yy(f) xp(f) yp(f)];disp(nu)enddisp ' 凸轮转角表里x 表里y 本质x 本质y'for f = d1 : 10 : d2nu = [f xx(f) yy(f) xp(f) yp(f)];disp(nu)endplot(xx,yy,'r.')axis ([(rb+h10) (rb+h+10) (rb+h+10) (rb+rt+10)]) axis equaltext(rb+h+3,0,'X')text(0,rb+rt+3,'Y')text(5,5,'O')title('偏偏置移动从动件盘形凸轮安排')hold on;plot([(rb+h) (rb+h)],[0 0],'k')plot([0 0],[(rb+h) (rb+rt)],'k')plot([e e],[0 (rb+rt)],'k')ct = linspace(0,2*pi);plot(rb*cos(ct),rb*sin(ct),'g')plot(e*cos(ct),e*sin(ct),'c')plot(e + rt*cos(ct),se + rt*sin(ct),'m')plot(xp,yp,'b')五、运止截止截图。
■2凸轮轮廓及其综合1.凸轮机构从动件的位移凸轮是把一种运动转化为另一种运动的装置。
凸轮的廓线和从动件一起实现运动形式的转换。
凸轮通常是为定轴转动,凸轮旋转运动可被转化成摆动、直线运动或是两者的结合。
凸轮机构设计的内容之一是凸轮廓线的设计。
定义一个凸轮基圆r b 作为最小的圆周半径。
从动件的运动方程如下:L(「)=r b +s(「)a( :) = 0 2 3 w ' w 2n设凸轮的推程运动角和回程运动角均为 3,从动件的运动规律均为正弦加速度运动规律, 则有:s( :) = h(:—sin(2 n / 3 )) Ow w 3s( :) = h — h(心―|31- sin(2 n (「- 3 / 3 ))s( :) = 0 2上式是从动件的位移,h 是从动件的最大位移,并且 o w3w如果假设凸轮的旋转速度 3= d 「/dt 是个常量,则速度 加速度a 和瞬时加速度j(加速度对时间求异)分别如下:速度:h(:)=(1-cos(2 n ■■ / 3 ))0W W加速度:h(;:)=—:(1-cos(2 n (「- 3 )/(;:)=0 2 3 w w 2 na(「)=..厂sin(2 n ■■/ 3 ))a( J =-sin(2 n ( ■- 3 )/ 3 )3w w 23beta=60*pi/180;phi=li nspace(0,beta,40);phi2=[beta+phi]; ph=[phi phi2]*180/pi; arg=2*pi*phi/beta;arg2=2*pi*(phi2-beta)/beta;s=[phi/beta-si n(arg)/2/pi 1-(arg2-si n(arg2))/2/pi]; v=[(1_cos(arg))/beta_(1_cos(arg2))/beta]; a=[2*pi/beta A 2*si n(arg)2*pi/beta A 2*si n(arg2)];j=[4*pi A 2/beta A 3*cos(arg)4*pi A 2/beta A 3*cos(arg2)]:subplot(2,2,1) plot(ph,s, / K x ) xlabel( / Cam angle(degrees) / ) ylabel( / Displacement(S) x ) g=axis; g(2)=120; axis(g) subplot(2,2,2) plot(ph,v, / k x,[0 120],[0 0],/ k-- / ) xlabel( / Cam angle(degrees) / )ylabel(/ Velocity(V)')g=axis; g(2)=120; axis(g) subplot(2,2,3)plot(ph,a, / k x ,[0 120],[0 0], / k--')xlabel( / Cam angle(degrees) / ) ylabel( / Acceleration(A) x ) g=axis; g(2)=120; axis(g) subplot(2,2,4)plot(ph,j, / k ,,[0 120],[0 0],/ k-- j瞬时加速度:j(.)=4-:3 hcos(2 n ■■/ 3 )) j(伫4n ( - 3)/ 3)j(定义无量纲位移S=s/h 、无量纲速度 V=u / 3 h 、无量纲加速度 A=a/h 3 3和无量纲瞬时加速度 J=j/h 3 3。
凸轮廓线的MATLAB画法凸轮廓线的MATLAB 画法1 凸轮轮廓⽅程*()()*()()*()*()X OE EF E Cos J So S Sin J Y BD FD So S Cos J E Sin J =+=++=-=+-(X,Y):凸轮轮廓线上的任意⼀点的坐标。
E :从动件的偏⼼距。
R :凸轮的基园半径。
J :凸轮的转⾓。
S :S=f(J)为从动件的⽅程。
So :22O S R E =-H 为从动件的最⼤位移(mm )。
J1、J2、J3、J4为从动件的四个转⾓的区域。
S1、S2、S3、S4为与J1、J2、J3、J4对应的从动件的运动规律。
2 实例R=40,E=10,H=50,J1=J2=J3=J4=900。
3 MATLAB 程序设计⽤⾓度值计算,对于给定的J1、J2、J3、J4,把相应的公式代⼊其中,求出位移S 和轮廓线上的各点的坐标X 、Y ,最终求出描述凸轮的数组:J=[J1,J2,J3,J4];S=[S1,S2,S3,S4];X=[X1,X2,X3,X4];Y=[Y1,Y2,Y3,Y4];⽤函数plot (X,,Y )画出凸轮的轮廓曲线;⽤plot (J,S )函数位移S 的曲线;对于速度曲线V-t 和加速度曲线a-t ,ds ds ds dt dt V dJ dJ dtω=== 在算例中已假设凸轮匀速转动的⾓速度为1wad/s ,所以ds ds ds ds dt dt V dJ dt dJ dtω====速度同理可得:dJ ds dt dv a 22==加速度4 程序运⾏结果图⼀:余弦速运动规律下的凸轮轮廓曲线图⼆:余弦加速作⽤下的S-α曲线5 附程序:1、程序实例说明R=40;E=10;H=50;J1=90;J2=90;J3=90;J4=90;S0=(R^2-E^2)^(1/2);syms J S dJ dS d2J d2S syms定义符号变量,定义后字符变量才能⽤J11=linspace(0,J1,500);linspace⽤于产⽣两点间的N点⾏⽮量。
凸轮轮廓及其综合1. 凸轮机构从动件的位移凸轮是把一种运动转化为另一种运动的装置。
凸轮的廓线和从动件一起实现运动形式的转换。
凸轮通常是为定轴转动,凸轮旋转运动可被转化成摆动、直线运动或是两者的结合。
凸轮机构设计的内容之一是凸轮廓线的设计。
定义一个凸轮基圆r b 作为最小的圆周半径。
从动件的运动方程如下:L(ϕ)=r b +s(ϕ)设凸轮的推程运动角和回程运动角均为β,从动件的运动规律均为正弦加速度运动规律,则有:s(ϕ)=h(βϕ-π21sin(2πϕ/β)) 0≤ϕ≤βs(ϕ)=h -h(ββϕ--π21sin(2π(ϕ-β/β)) β≤ϕ≤2βs(ϕ)=0 2β≤ϕ≤2π上式是从动件的位移,h 是从动件的最大位移,并且0≤β≤π。
如果假设凸轮的旋转速度ω=d ϕ/dt 是个常量,则速度υ、加速度a 和瞬时加速度j (加速度对时间求异)分别如下:速度:υ(ϕ)=βωh(1-cos(2πϕ/β)) 0≤ϕ≤β υ(ϕ)=-βωh(1-cos(2π(ϕ-β)/β) β≤ϕ≤2β υ(ϕ)=0 2β≤ϕ≤2π加速度:a(ϕ)=222βπωhsin(2πϕ/β)) 0≤ϕ≤βa(ϕ)=-222βπωhsin(2π(ϕ-β)/β) β≤ϕ≤2βa(ϕ)=0 2β≤ϕ≤2π瞬时加速度:j(ϕ)=3324βωπhcos(2πϕ/β)) 0≤ϕ≤βj(ϕ)=-3324βωπhcos(2π(ϕ-β)/β) β≤ϕ≤2βj(ϕ)=0 2β≤ϕ≤2π定义无量纲位移S=s/h 、无量纲速度V=υ/ωh 、无量纲加速度A=a/h ω3和无量纲瞬时加速度J=j/h ω3。
若β=60°,则如下程序可以对以上各个量进行计算。
beta=60*pi/180;phi=linspace(0,beta,40); phi2=[beta+phi]; ph=[phi phi2]*180/pi; arg=2*pi*phi/beta;arg2=2*pi*(phi2-beta)/beta;s=[phi/beta-sin(arg)/2/pi 1-(arg2-sin(arg2))/2/pi]; v=[(1-cos(arg))/beta-(1-cos(arg2))/beta]; a=[2*pi/beta^2*sin(arg)2*pi/beta^2*sin(arg2)];j=[4*pi^2/beta^3*cos(arg)4*pi^2/beta^3*cos(arg2)]:subplot(2,2,1) plot(ph,s,ˊK ˊ)xlabel(ˊCam angle(degrees)ˊ) ylabel(ˊDisplacement(S)ˊ) g=axis; g(2)=120; axis(g) subplot(2,2,2)plot(ph,v,ˊk ˊ,[0 120],[0 0],ˊk--ˊ) xlabel(ˊCam angle(degrees)ˊ) ylabel(ˊVelocity(V)ˊ) g=axis; g(2)=120; axis(g) subplot(2,2,3)plot(ph,a,ˊk ˊ,[0 120],[0 0],ˊk--ˊ) xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊAcceleration(A)ˊ)g=axis;g(2)=120;axis(g)subplot(2,2,4)plot(ph,j,ˊkˊ,[0 120],[0 0],ˊk--ˊ)xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊJerk(J)ˊ)g=axis;g(2)=120;axis(g)2 平底盘形从动作参考下图得到如下关系:在(x,y)坐标系中,凸轮轮廓的坐标为Rx和Ry,刀具的坐标为Cx和Cy:Rx=Rcos( θ+ϕ) Ry=Rsin( θ+ϕ)C x=Ccos( γ+ϕ) C y=Ccos( γ+ϕ)其中,R=θcos Lθ=arctan ⎪⎪⎭⎫ ⎝⎛ϕd dL L 1 c=γγcos cL + γ=arctan ⎪⎪⎭⎫ ⎝⎛+c L d dL γϕ/ r c 是刀具的半径,且dL/d ϕ=V(ϕ)/ω。
中国地质大学〔武汉〕1. 凸轮要求设计一对心直动滚子推杆盘形凸轮机构,滚子半径r r =10mm,凸轮以等角速度逆时针回转.凸轮转角δ=0~120 时,推杆等速上升20mm ;δ=120~180 时,推杆远休止;δ=180~270时,推杆等加速等减速下降20mm ;δ=270~360时,推杆近休止.要求推程的最大压力角α<=30,试选取合适的基圆半径,并绘制凸轮的廓线.问此凸轮是否有缺陷,应如何补救.2.列出凸轮运动方程 {S =30π∗δV =30πa =00<δ<2/3π{S =20V =0a =02/3π<δ<π {S =−140+320π∗δ−160π∗δ^2V =320π−320π2∗δa =−320/π^2π<δ<54π{S =360−480π∗δ+160π2∗δ^2V =−480π−320π2∗δa =−320/π^25/4π<δ<32π {S =0V =0a =02/3π<δ<2π3.由方程写MATLAB 源程序%1.已知参数 clear;r0=50; %基圆半径 rr=10; %滚子半径 h=20; %行程delta01=120;%推程运动角 delta02=60; % 远休角 delta03=90;%回程运动角 hd=pi/180; du=180/pi;n1=delta01+delta02; n2=delta01+delta02+delta03;%2凸轮曲线设计n=360;for i=1:360%计算推杆运动规律if i<=delta01s<i>=30/pi*<i*hd>;ds<i>=30/pi;ds=ds<i>;elseif i>delta01 && i<=n1;s<i>=h;ds<i>=0;ds=ds<i>;elseif i>n1 && i<=<n1+delta03/2>s<i>=-140+320/pi*<i*hd>-160/pi^2*<i*hd>^2;ds<i>=320/pi-320/pi^2*<i*hd>;ds=ds<i>;elseif i><n1+delta03/2> && i<=n2s<i>=360-480/pi*<i*hd>+160/pi^2*<i*hd>^2;ds<i>=-480/pi+320/pi^2*<i*hd>;ds=ds<i>;elseif i>n2 && i<=ns<i>=0;ds=0;end%计算凸轮轨迹曲线xx<i>=<r0+s<i>>*sin<i*hd>;%计算理论轮廓曲线yy<i>=<r0+s<i>>*cos<i*hd>;dx<i>=ds*sin<i*hd>+<r0+s<i>>*cos<i*hd>;%计算导数dy<i>=ds*cos<i*hd>-<r0+s<i>>*sin<i*hd>;xp<i>=xx<i>+rr*dy<i>/sqrt<dx<i>^2+dy<i>^2>;yp<i>=yy<i>-rr*dx<i>/sqrt<dx<i>^2+dy<i>^2>;end%3.输出凸轮轮廓曲线figure<1>;hold on;grid on;axis equal;axis<[-<r0+h-30> <r0+h+10> -<r0+h+10> <r0+rr+10>]>; text<r0+h+3,4,'X'>;text<3,r0+rr+3,'Y'>;text<-6,4,'O'>;title<'对心直动滚子推杆盘形凸轮设计'>;xlabel<'x/mm'>;ylabel<'y/mm'>;plot<[-<r0+h-40> <r0+h>],[0 0],'k'>;plot<[0 0],[-<r0+h> <r0+rr>],'k'>;plot<xx,yy,'r--'>;%»绘凸轮实际轮廓曲线ct=linspace<0,2*pi>;plot<r0*cos<ct>,r0*sin<ct>,'g'>;%绘凸轮基圆plot<rr*cos<ct>,r0+rr*sin<ct>,'k'>;%绘滚子圆plot<0,r0,'o'>;%滚子圆中心plot<[0 0],[r0 r0+30],'k'>;plot<xp,yp,'b'>; %绘凸轮实际轮廓曲线%4. 凸轮机构运动仿真%计算凸轮滚子转角xp0=0;yp0=r0-rr;dss=sqrt<diff<xp>.^2+diff<yp>.^2>;%对轮廓曲线进行差分计算ss<1>=sqrt<<xp<1>-xp0>^2+<xp<1>-yp0>^2>;%轮廓曲线第一点长度for i=1:359ss<i+1>=ss<i>+dss<i>;%计算实际廓曲线长度endphi=ss/rr;%计算滚子转角%运动仿真开始figure<2>;m=moviein<20>;j=0;for i=1:360j=j+1;delta<i>=i*hd;%凸轮转角xy=[xp',yp'];%凸轮实际轮廓曲线坐标A1=[cos<delta<i>>,sin<delta<i>>;%凸轮坐标旋转矩阵-sin<delta<i>>,cos<delta<i>>];xy=xy*A1;%旋转后实际凸轮曲线坐标clf;%绘凸轮plot<xy<:,1>,xy<:,2>>;hold on;axis equal;axis<[-<120> <470> -<100> <140>]>;plot<[-<r0+h-40> <r0+h>],[0],'k'>;%绘凸轮水平轴plot<[0 0],[-<r0+h> <r0+rr>],'k'>;%绘凸轮垂直轴plot<r0*cos<ct>,r0*sin<ct>,'g'>;%绘基圆plot<rr*cos<ct>,r0+s<i>+rr*sin<ct>,'k'>;绘滚子圆plot<[0 rr*cos<-phi<i>>],[r0+s<i> r0+s<i>+rr*sin<-phi<i>>],'k'>; % 绘滚子圆标线plot<[0 0],[r0+s<i> r0+s<i>+40],'k'>;%绘推杆%绘推杆曲线plot<[1:360]+r0+h,s+r0>;plot<[<r0+h> <r0+h+360>],[r0 r0],'k'>;plot<[<r0+h> <r0+h>],[r0 r0+h],'k'>;plot<i+r0+h,s<i>+r0,'*'>;title<'对心直动滚子推杆盘形凸轮设计'>;xlabel<'x/mm'>;ylable<'y/mm'>;m<j>=getframe;endmovie<m>;4.运动仿真结果在MATLAB中可以看出轮廓曲线有一处缺口.应用圆弧连接起来. 5.计算结果由于数据太多,只等间隔取了三十六组数据Xx8.9718 18.2411 27.5000 36.4246 44.6859 51.9615 57.9477 62.3712 65.0000 65.6539 64.2123 60.6218 53.6231 44.9951 35.0000 23.9414 12.1554 0.0000 -12.0696 -23.2658 -32.7778 -39.9163 -44.3549 -47.1503 -48.8408 -49.7267 -50.0000 -49.2404 -46.9846 -43.3013 -38.3022 -32.1394 -25.0000 -17.1010 -8.6824 -0.0000Yy50.8817 50.1169 47.6314 43.4092 37.4959 30.0000 21.0912 10.9977 0.0000 -11.5765 -23.3714 -35.0000 -44.9951 -53.6231 -60.6218 -65.7785 -68.9365-70.0000 -68.4502 -63.9223 -56.7728 -47.5704 -37.2182 -27.2222 -17.7766 -8.7682 -0.0000 8.6824 17.1010 25.0000 32.1394 38.3022 43.3013 46.984649.2404 50.0000Dx52.5400 53.3830 52.4060 49.5474 44.8111 38.2699 30.0646 20.4019 9.5493 -2.1723 -14.3980 -26.7301 -44.9951 -53.6231 -60.6218 -65.7785 -68.9365-70.0000 -67.4676 -60.0514 -48.2845 -33.0207 -19.8785 -12.5201 -7.1415 -3.1953 0.0000 8.6824 17.1010 25.0000 32.1394 38.3022 43.3013 46.984649.2404 50.0000Dy0.4324 -9.2677 -19.2301 -29.1094 -38.5478 -47.1869 -54.6817 -60.7129 -65.0000 -67.3121 -67.4784 -65.3964 -53.6231 -44.9951 -35.0000 -23.9414 -12.1554-0.0000 17.6425 33.9010 47.4799 57.2560 58.9047 55.6385 52.7117 50.7094 50.0000 49.2404 46.9846 43.3013 38.3022 32.1394 25.0000 17.10108.6824 0.0000。
凸轮轮廓及其综合1. 凸轮机构从动件的位移凸轮是把一种运动转化为另一种运动的装置。
凸轮的廓线和从动件一起实现运动形式的转换。
凸轮通常是为定轴转动,凸轮旋转运动可被转化成摆动、直线运动或是两者的结合。
凸轮机构设计的内容之一是凸轮廓线的设计。
定义一个凸轮基圆r b 作为最小的圆周半径。
从动件的运动方程如下:L()=r b +s()ϕϕ设凸轮的推程运动角和回程运动角均为β,从动件的运动规律均为正弦加速度运动规律,则有:s()=h(-sin(2π/β)) 0≤≤βϕβϕπ21ϕϕs()=h -h(-sin(2π(-β/β)) β≤≤2βϕββϕ-π21ϕϕs()=0 2β≤≤2πϕϕ上式是从动件的位移,h 是从动件的最大位移,并且0≤β≤π。
如果假设凸轮的旋转速度ω=d /dt 是个常量,则速度υ、加速度a 和瞬时加速度ϕj (加速度对时间求异)分别如下:速度:υ()=(1-cos(2π/β)) 0≤≤βϕβωh ϕϕυ()=-(1-cos(2π(-β)/β) β≤≤2βϕβωh ϕϕυ()=0 2β≤≤2πϕϕ加速度:a()=sin(2π/β)) 0≤≤βϕ222βπωh ϕϕa()=-sin(2π(-β)/β) β≤≤2βϕ222βπωh ϕϕa()=0 2β≤≤2πϕϕ瞬时加速度:j()=cos(2π/β)) 0≤≤βϕ3324βωπh ϕϕj()=-cos(2π(-β)/β) β≤≤2βϕ3324βωπh ϕϕj()=0 2β≤≤2πϕϕ定义无量纲位移S=s/h 、无量纲速度V=υ/ωh、无量纲加速度A=a/hω3和无量纲瞬时加速度J=j/hω3。
若β=60°,则如下程序可以对以上各个量进行计算。
beta=60*pi/180;phi=linspace(0,beta,40);phi2=[beta+phi];ph=[phi phi2]*180/pi;arg=2*pi*phi/beta;arg2=2*pi*(phi2-beta)/beta;s=[phi/beta-sin(arg)/2/pi 1-(arg2-sin(arg2))/2/pi];v=[(1-cos(arg))/beta-(1-cos(arg2))/beta];a=[2*pi/beta^2*sin(arg)2*pi/beta^2*sin(arg2)];j=[4*pi^2/beta^3*cos(arg)4*pi^2/beta^3*cos(arg2)]:subplot(2,2,1)plot(ph,s,ˊKˊ)xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊDisplacement(S)ˊ)g=axis; g(2)=120; axis(g)subplot(2,2,2)plot(ph,v,ˊkˊ,[0 120],[0 0],ˊk--ˊ)xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊVelocity(V)ˊ)g=axis; g(2)=120; axis(g)subplot(2,2,3)plot(ph,a,ˊkˊ,[0 120],[0 0],ˊk--ˊ)xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊAcceleration(A)ˊ)g=axis;g(2)=120;axis(g)subplot(2,2,4)plot(ph,j,ˊkˊ,[0 120],[0 0],ˊk--ˊ)xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊJerk(J)ˊ)g=axis;g(2)=120;axis(g)2 平底盘形从动作参考下图得到如下关系:在(x,y)坐标系中,凸轮轮廓的坐标为Rx和Ry,刀具的坐标为Cx和Cy:Rx =Rcos( θ+) Ry =Rsin( θ+)ϕϕC x =Ccos( γ+) C y =Ccos( γ+)ϕϕ其中,R= θ=arctan θcos L ⎪⎪⎭⎫ ⎝⎛ϕd dL L 1c= =arctan γγcos c L +γ⎪⎪⎭⎫ ⎝⎛+c L d dL γϕ/r c 是刀具的半径,且dL/d =V()/ω。
基于matlab的凸轮轮廓曲线的分析与研究
石全伟;张迎春;王金铃
【期刊名称】《现代机械》
【年(卷),期】2006(000)003
【摘要】本文以包络原理为基础,在从动件运动规律给定的情况下,通过matlab编程来对凸轮机构进行分析与研究,并通过实例绘制出其理论廓线和实际廓线.
【总页数】2页(P75-76)
【作者】石全伟;张迎春;王金铃
【作者单位】天津工业大学,机电学院,天津,300160;天津工业大学,机电学院,天津,300160;天津工业大学,机电学院,天津,300160
【正文语种】中文
【中图分类】TH13
【相关文献】
1.基于MATLAB软件的凸轮轮廓曲线设计及从动件运动学仿真 [J], 李霞;刘本学;张三川
2.基于Matlab和Pro/E的凸轮轮廓曲线精确设计 [J], 陈韵
3.基于Matlab和Pro/E的凸轮轮廓曲线设计及从动件运动学仿真 [J], 肖帮东;黄浩;徐中
4.基于MATLAB的凸轮轮廓曲线设计 [J], 丁天天;牛成亮;蒋超猛;龚伟
5.基于MATLAB语言的凸轮轮廓曲线的解析法设计 [J], 杜韧;冯伟娜;刘昭;刘宏伟;毕珊珊
因版权原因,仅展示原文概要,查看原文内容请购买。