Matlab编程五次凸轮
- 格式:doc
- 大小:1.05 MB
- 文档页数:6
基于MATLAB的凸轮设计凸轮是一种用于转动机件的机械元件,常用于驱动一些运动部件做往复运动或者周期性运动。
在机械设计中,通过凸轮的设计可以实现复杂的运动路径,以及具有特定速度和加速度要求的运动。
MATLAB是一种强大的数学计算和编程环境,可以用于进行科学计算、数据分析和算法开发。
在凸轮设计中,MATLAB可以用于凸轮曲线的生成、设计和优化。
本文将介绍如何基于MATLAB进行凸轮设计。
在凸轮设计中,最重要的是凸轮曲线的生成。
凸轮曲线是一个由数据点组成的模板,通过插值或者数值逼近的方法可以生成一个光滑的凸轮曲线。
在 MATLAB 中,可以使用插值函数 interp1 或者曲线拟合函数polyfit 进行凸轮曲线的生成。
具体步骤如下:1.定义凸轮的设计参数,例如凸轮的半径、凸轮转动的角度范围等;2.根据凸轮的设计参数,生成一些数据点,这些数据点可以通过数学计算或者几何建模等方式得到;3. 使用插值函数 interp1 或者曲线拟合函数 polyfit 对这些数据点进行插值或者拟合,得到一个平滑的曲线;4.根据凸轮转动的角度范围,生成一系列角度的数据点;5. 使用插值函数 interp1 或者曲线拟合函数 polyval 对这些角度的数据点进行插值或者拟合,得到一系列对应的曲线坐标点;6.将这些坐标点绘制成凸轮曲线,并进行可视化。
除了凸轮曲线的生成,MATLAB 还可以用于凸轮的设计和优化。
凸轮设计包括凸轮的尺寸设计、运动路径设计等。
在 MATLAB 中,可以使用优化函数 fmincon 或者遗传算法函数 ga 进行凸轮设计的优化,以获得符合设计要求的凸轮参数。
具体步骤如下:1.定义凸轮的设计变量和目标函数。
设计变量可以是凸轮的尺寸参数,例如凸轮半径、凸轮高度等;目标函数可以是凸轮的运动路径误差、速度误差等。
2.定义凸轮的约束条件。
约束条件可以是凸轮的尺寸范围、速度和加速度的限制等。
3. 使用优化函数 fmincon 或者遗传算法函数 ga 对凸轮的设计变量进行优化,以使目标函数最小化或者最大化。
偏置盘型凸轮创新课程设计课程名称:机械原理设计题目:偏置盘型凸轮设计院系:机电学院班级: 09机41设计者:彭辉学号: 09294040指导教师:王卫辰学校:江苏师范大学前言凸轮轮廓曲线的设计,一样可分为图解法和解析法.利用图解法能比较方便地绘制出各类平面凸轮的轮廓曲线.但这种方式仅适用于比较简单的结构,用它对复杂结构进行设计那么比较困难,而且利用图解法进行结构设计,作图误差较大,对一些精度要求高的结构不能知足设计要求.解析法能够依照设计要求,通过推导机构中各部份之间的几何关系,成立相应的方程,精准地计算出轮廓线上各点的坐标,然后把凸轮的轮廓曲线精准地绘制出来.可是,当从动件运动规律比较复杂时,利用解析法取得凸轮的轮廓曲线的工作量比较大.而MATLAB软件提供了壮大的矩阵处置和画图功能,具有核心函数和工具箱.其编程代码接近数学推导公式,简练直观,操作简易,人机交互性能好,且能够方便迅速地用三维图形、图像、声音、动画等表达计算结果、拓展思路口。
因此,基于MATLAB软件进行凸轮机构的解析法设计,能够解决设计工作量大的问题。
本此课程设计基于MATLAB软件进行凸轮轮廓曲线的解析法设计,并对的运动规律凸轮进行仿真,其具体方式为第一精准地计算出轮廓线上各点的坐标,然后运用MATLAB绘制比较精确的凸轮轮廓曲线和推杆的位移、速度及加速度曲线和仿真。
目录前言 1第一章:工作意义 31.1本次课程设计意义31.2 已知条件4第二章:工作设计进程 5 2.1:设计思路 5 2.2:滚子从动件各个时期相关方程 6 2.3:盘型凸轮理论与实际轮廓方程 7第三章:工作程序进程 7 3.1:滚子从动件各各时期MATLAB程序编制 8 3.2:凸轮的理论实际运动仿真程序编制 12 第四章:运行结果 17 4.1:滚子运动的位移图 17 4.2:滚子运动的速度图 17 4.3:滚子运动的加速度图,局部加速度图 18 4.4:滚子运动的仿真图 19 4.5:滚子运动的理论与实际轮廓图 20第五章:设计总结 21 5.1:总结 21第六章:参考文献 22 6.1:参考文献 22第一章:工作意义1.1本次课程设计意义凸轮是一个具有曲线轮廓或凹槽的构件,一样为主动件,作等速回转运动或往复直线运动。
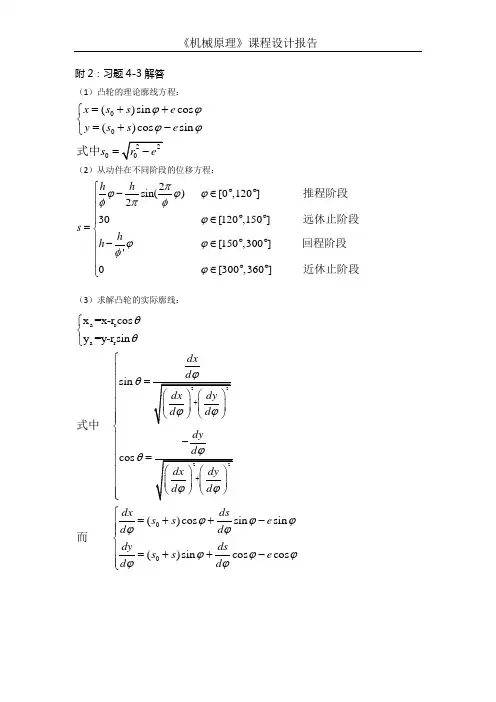
附2:习题4-3解答(1)凸轮的理论廓线方程:000()sin cos ()cos sin x s s e y s s e s ϕϕϕϕ=++⎧⎨=+-⎩=式中 (2)从动件在不同阶段的位移方程:2sin()[0,120]230[120,150][150,300]'0[300,360]h h s h h πϕϕϕφπφϕϕϕφϕ⎧-∈︒︒⎪⎪∈︒︒⎪=⎨⎪-∈︒︒⎪⎪∈︒︒⎩推程阶段远休止阶段回程阶段近休止阶段(3)求解凸轮的实际廓线:a r a r 00x =x-r cos y =y-r sin sin cos ()cos sin sin ()sin cos cos dx dy dxds s s e d d dy ds s s e d d θθθθϕϕϕϕϕϕϕϕϕϕ⎧⎨⎩⎧⎪=⎪⎪⎪⎪⎪⎨⎪-⎪=⎪⎪⎪⎪⎩⎧=++-⎪⎪⎨⎪=++-⎪⎩式中而同样,由于位移s 与从动件所处的运动阶段有关,所以有:2cos()[0,120]0[120,150]s [150,300]'0[300,360]h hd hd πϕϕφφφϕϕϕφϕ⎧-∈︒︒⎪⎪∈︒︒⎪=⎨⎪∈︒︒⎪⎪∈︒︒⎩推程阶段远休止阶段回程阶段近休止阶段(4)代入已知条件,并用Matlab 语言编程求解,编程代码如下: disp ' ******** 偏置直动滚子从动件盘形凸轮设计 ********' disp '已知条件:'disp ' 凸轮作逆时针方向转动,从动件偏置在凸轮轴心的右边'disp ' 从动件在推程作摆线运动规律运动,在回程作等速运动规律运动' ro = 50;rr = 10;e = 12;h = 30;ft = 120;fs = 30;fh = 150;fprintf (1,' 基圆半径 ro = %3.4f mm \n',ro) fprintf (1,' 滚子半径 rr = %3.4f mm \n',rr) fprintf (1,' 推杆偏距 e = %3.4f mm \n',e) fprintf (1,' 推程行程 h = %3.4f mm \n',h) fprintf (1,' 推程运动角 ft = %3.4f 度 \n',ft) fprintf (1,' 远休止角 fs = %3.4f 度 \n',fs) fprintf (1,' 回程运动角 fh = %3.4f 度 \n',fh) hd = pi / 180;du = 180 / pi; so = sqrt( ro^2 - e^2 ); d1 = ft + fs;d2 = ft + fs + fh; disp ' 'disp '计算过程和输出结果:'disp ' 1-1 推程(摆线运动规律运动)' s = zeros(ft);ds = zeros(ft);d2s = zeros(ft); for f = 1 : fts(f) = h * f / ft - h * sin(2 * pi * f / ft) / (2 * pi);s = s(f);ds(f) = h / (ft * hd) - h / (ft * hd) * cos(2 * pi * f / ft);ds = ds(f); d2s(f) = 2 * pi * h / (ft * hd) ^ 2 * sin(2 * pi * f / ft);d2s = d2s(f); enddisp ' 1-2 回程(等速运动规律运动)' s = zeros(fh);ds = zeros(fh);d2s = zeros(fh); for f = d1 : d2s(f) = h - h * (f-150) / fh; s = s(f); ds(f) = - h / (fh * hd);ds = ds(f); d2s(f) = 0;d2s = d2s(f); enddisp ' 2- 计算凸轮理论廓线与实际廓线的直角坐标'n = 360;s = zeros(n);ds = zeros(n);r = zeros(n);rp = zeros(n);x = zeros(n);y = zeros(n);dx = zeros(n);dy = zeros(n);xx = zeros(n);yy = zeros(n);xa = zeros(n);ya = zeros(n);xxa = zeros(n);yya = zeros(n);for f = 1 : nif f <= fts(f) = h * f / ft - h * sin(2 * pi * f / ft) / (2 * pi);s = s(f);ds(f) = h /(ft * hd) - h / (ft * hd) * cos(2 * pi * f / ft); ds = ds(f);elseif f > ft & f <= d1s = h;ds = 0;elseif f > d1 & f <= d2s(f) = h - h * (f-150) / fh; s = s(f);ds(f) = - h / (fh * hd);ds = ds(f);elseif f > d2 & f <= ns = 0;ds = 0;endxx(f) = (so + s) * sin(f * hd) + e * cos(f * hd); x = xx(f);yy(f) = (so + s) * cos(f * hd) - e * sin(f * hd); y = yy(f);dx(f) = (ds - e) * sin(f * hd) + (so + s) * cos(f * hd); dx = dx(f);dy(f) = (ds - e) * cos(f * hd) - (so + s) * sin(f * hd); dy = dy(f);xxa(f) = x + rr * dy / sqrt(dx ^ 2 + dy ^ 2);xa = xxa(f);yya(f) = y - rr * dx / sqrt(dx ^ 2 + dy ^ 2);ya = yya(f);r(f) = sqrt (x ^2 + y ^2 );rp(f) = sqrt (xa ^2 + ya ^2 );enddisp ' 2-1 推程(摆线运动规律运动)'disp ' 凸轮转角理论x 理论y 实际x 实际y' for f = 10 : 10 :ftnu = [f xx(f) yy(f) xxa(f) yya(f)];disp(nu)enddisp ' 2-2 回程(等速运动规律运动)'disp ' 凸轮转角理论x 理论y 实际x 实际y' for f = d1 : 10 : d2nu = [f xx(f) yy(f) xxa(f) yya(f)];disp(nu)enddisp ' 2-3 凸轮轮廓向径'disp ' 凸轮转角理论r 实际r'for f = 10 : 10 : nnu = [f r(f) rp(f)];disp(nu)enddisp '绘制凸轮的理论轮廓和实际轮廓:'plot(xx,yy,'r-.') % 理论轮廓(红色,点划线)axis ([-(ro+h-10) (ro+h+10) -(ro+h+10) (ro+rr+10)]) % 横轴和纵轴的下限和上限axis equal % 横轴和纵轴的尺度比例相同text(ro+h+3,0,'X') % 标注横轴text(0,ro+rr+3,'Y') % 标注纵轴text(-5,5,'O') % 标注直角坐标系原点title('偏置直动滚子从动件盘形凸轮设计') % 标注图形标题hold on; % 保持图形plot([-(ro+h) (ro+h)],[0 0],'k') % 横轴(黑色)plot([0 0],[-(ro+h) (ro+rr)],'k') % 纵轴(黑色)plot([e e],[0 (ro+rr)],'k--') % 初始偏置位置(黑色,虚线) ct = linspace(0,2*pi); % 画圆的极角变化范围plot(ro*cos(ct),ro*sin(ct),'g') % 基圆(绿色)plot(e*cos(ct),e*sin(ct),'c--') % 偏距圆(蓝绿色,虚线)plot(e + rr*cos(ct),so + rr*sin(ct),'y') % 滚子圆(黄色)plot(xxa,yya,'b') % 实际轮廓(蓝色)(5)求解凸轮理论廓线和实际廓线坐标值如下:******** 偏置直动滚子从动件盘形凸轮设计********已知条件:凸轮作逆时针方向转动,从动件偏置在凸轮轴心的右边从动件在推程作摆线运动规律运动,在回程作等速运动规律运动基圆半径ro = 50.0000 mm滚子半径rr = 10.0000 mm推杆偏距 e = 12.0000 mm推程行程h = 30.0000 mm推程运动角ft = 120.0000 度远休止角fs = 30.0000 度回程运动角fh = 150.0000 度计算过程和输出结果:1-1 推程(摆线运动规律运动)1-2 回程(等速运动规律运动)计算凸轮理论廓线与实际廓线的直角坐标2-1 推程(摆线运动规律运动)凸轮转角理论x 理论y 实际x 实际y10.0000 20.2659 45.8284 16.5674 36.537520.0000 28.1734 42.3200 23.8536 33.301230.0000 36.0243 38.3959 31.4216 29.518140.0000 44.1625 33.9622 39.1460 25.311550.0000 52.6430 28.5078 46.7788 20.407760.0000 61.0261 21.3770 53.9159 14.345370.0000 68.4036 12.1267 59.9368 6.8057 80.0000 73.6533 0.8019 64.1128 -2.1946 90.0000 75.8133 -12.0000 65.8180 -12.3064 100.0000 74.4098 -25.3056 64.6887 -22.9602 110.0000 69.5921 -38.0996 60.7079 -33.5092 120.0000 62.0165 -49.6616 54.2107 -43.41102-2 回程(等速运动规律运动)凸轮转角理论x 理论y 实际x 实际y 150.0000 28.8770 -74.0165 25.2424 -64.7004 160.0000 14.9014 -76.0270 14.3851 -66.0404 170.0000 1.1258 -75.4900 2.4259 -65.5749 180.0000 -12.0000 -72.5386 -8.9229 -63.0238 190.0000 -24.0666 -67.3832 -19.3110 -58.5864 200.0000 -34.7179 -60.3010 -28.4390 -52.5180 210.0000 -43.6616 -51.6242 -36.0665 -45.1192 220.0000 -50.6772 -41.7260 -42.0190 -36.7223 230.0000 -55.6208 -31.0065 -46.1908 -27.6786 240.0000 -58.4280 -19.8770 -48.5462 -18.3440 250.0000 -59.1126 -8.7451 -49.1177 -9.0659 260.0000 -57.7635 1.9999 -48.0018 -0.1704 270.0000 -54.5386 12.0000 -45.3524 8.0487 280.0000 -49.6567 20.9409 -41.3723 15.3401 290.0000 -43.3865 28.5615 -36.3031 21.5028 300.0000 -36.0357 34.6616 -30.4141 26.39132-3 凸轮轮廓向径凸轮转角理论r 实际r10.0000 50.1094 40.118220.0000 50.8402 40.962930.0000 52.6498 43.111940.0000 55.7114 46.616350.0000 59.8663 51.036660.0000 64.6619 55.791770.0000 69.4702 60.322080.0000 73.6577 64.150490.0000 76.7571 66.9586100.0000 78.5951 68.6426110.0000 79.3387 69.3420120.0000 79.4501 69.4501130.0000 79.4501 69.4501140.0000 79.4501 69.4501150.0000 79.4501 69.4501160.0000 77.4736 67.5889170.0000 75.4984 65.6197180.0000 73.5245 63.6524190.0000 71.5521 61.6869200.0000 69.5812 59.7237210.0000 67.6121 57.7628220.0000 65.6448 55.8044230.0000 63.6795 53.8489240.0000 61.7165 51.8964250.0000 59.7559 49.9474260.0000 57.7981 48.0021270.0000 55.8432 46.0611280.0000 53.8916 44.1247290.0000 51.9438 42.1935300.0000 50.0000 40.2681310.0000 50.0000 40.0000320 50 40330.0000 50.0000 40.0000340 50 40350.0000 50.0000 40.0000360.0000 50.0000 40.0000(6)由Matlab绘制的实际图轮廓线和理论图轮廓线如下:图例:绿色——基圆;红色点划线——理论廓线;蓝色——实际廓线;黄色——滚子圆;蓝绿色,虚线——偏距圆;黑色,虚线——初始偏置位置;。
弹簧机构MATLAB凸轮代码下面是一个示例MATLAB 代码,可以用来模拟凸轮机构。
这段代码使用了凸轮机构的解析解,通过迭代解决方程来求解位置和速度。
首先,我们需要设置一些参数,包括凸轮机构的几何参数(如凸轮半径和齿数),以及模拟的时间步长和模拟的总时间。
clear;clc;% Set simulation parametersdt = 0.01; % time stept_total = 5; % total simulation time% Set mechanism parametersR = 1; % crank radiusr = 0.5; % follower radiusN = 20; % number of teeth然后,我们需要计算凸轮机构的解析解。
这可以通过迭代方程来实现,方程如下x_i+1 = x_i + dt*v_i+1v_i+1 = v_i + dt*a_i+1其中x_i 和v_i 分别表示第i 次迭代时凸轮机构的位置和速度,a_i 表示凸轮机构的加速度。
% Initialize position and velocityx = 0;v = 0;% Initialize timet = 0;% Initialize arrays to store position and velocity datax_data = [];v_data = [];% Iterate through timewhile t < t_total% Calculate accelerationa = (R - r)*sin(x) / (R*N);% Update position and velocityx = x + dt*v;v = v + dt*a;% Store datax_data = [x_data x];v_data = [v_data v];% Update timet = t + dt;end最后,我们可以使用MATLAB 的plot 函数绘制凸轮机构的位置和速度随时间的变化情况。
matlab凸轮摇杆机构设计动画代码一、引言凸轮摇杆机构是机械工程中常见的一种机构,其运动特性决定了它在很多领域都有广泛的应用,例如发动机、汽车、船舶等。
而在设计凸轮摇杆机构时,需要进行大量的计算和试验,这对于工程师来说是一个非常繁琐的过程。
但是,通过使用MATLAB软件可以大大简化这个过程,并且可以生成动画效果来更直观地展示凸轮摇杆机构的运动特性。
二、MATLAB凸轮摇杆机构设计代码以下是MATLAB代码实现凸轮摇杆机构的动画效果:1. 定义凸轮形状首先需要定义凸轮的形状,可以采用圆弧、正弦曲线等方式进行定义。
例如,在此我们采用正弦曲线进行定义:```matlabtheta = linspace(0,2*pi,100);r = 1+sin(theta);```2. 定义摇杆长度和连杆长度根据具体情况定义摇杆长度和连杆长度:```matlabL1 = 3;L2 = 6;```3. 计算连杆末端位置坐标根据凸轮形状和连杆长度,可以计算出连杆末端的位置坐标:```matlabx1 = r.*cos(theta);y1 = r.*sin(theta);x2 = x1 + L1*cos(theta);y2 = y1 + L1*sin(theta);```4. 计算摇杆末端位置坐标根据连杆长度和摇杆长度,可以计算出摇杆末端的位置坐标:```matlabtheta2 = asin((y2-L2)./L1);x3 = x2 - L2*cos(theta-theta2);y3 = y2 - L2*sin(theta-theta2);```5. 绘制动画效果最后,使用MATLAB的plot函数绘制凸轮摇杆机构的动画效果:```matlabfor i=1:length(x3)plot([0,x2(i),x3(i)],[0,y2(i),y3(i)],'k-o','linewidth',4,'MarkerFaceColor','r','MarkerSize',10)axis equalpause(0.01)end```三、MATLAB凸轮摇杆机构设计代码详解1. 步骤一:定义凸轮形状在此我们采用正弦曲线进行定义。
凸轮轮廓程序:>> e=20;s0=77.46;a1=0:pi/36:pi/3;s1=50*[3*a1/pi-sin(6*a1)/(2*pi)];x1=(s0+s1).*sin(a1)+e*cos(a1);y1=(s0+s1).*cos(a1)-e*sin(a1);k1=150/pi*[1-cos(6*a1)];>> i1=[(k1-e).*sin(a1)+(s0+s1).*cos(a1)].*[(k1-e).*(k1-e)+(s0+s1).*(s0+s1)].^(-1/2);>> j1=[-(k1-e).*cos(a1)+(s0+s1).*sin(a1)].*[(k1-e).*(k1-e)+(s0+s1).*(s0+s1)].^(-1/2);>> x10=x1-10*j1;>> y10=y1-10*i1;a2=pi/3:pi/36:pi;s2=50;x2=(s0+s2).*sin(a2)+e*cos(a2);y2=(s0+s2).*cos(a2)-e*sin(a2);k2=0;>> i2=[(k2-e).*sin(a2)+(s0+s2).*cos(a2)].*[(k2-e).*(k2-e)+(s0+s2).*(s0+s2)].^(-1/2);j2=[-(k2-e).*cos(a2)+(s0+s2).*sin(a2)].*[(k2-e).*(k2-e)+(s0+s2).*(s0+s2)].^(-1/2);x20=x2-10*j2;y20=y2-10*i2;>> a3=pi:pi/36:4*pi/3;>> s3=50*[1-3*(a3-pi)/pi+sin(6*(a3-pi))/(2*pi)];>> x3=(s0+s3).*sin(a3)+e*cos(a3);>> y3=(s0+s3).*cos(a3)-e*sin(a3);>> k3=50*[-3/pi+3/pi*cos(6*(a3-pi))];>> i3=[(k3-e).*sin(a3)+(s0+s3).*cos(a3)].*[(k3-e).*(k3-e)+(s0+s3).*(s0+s3)].^(-1/2);>> j3=[-(k3-e).*cos(a3)+(s0+s3).*sin(a3)].*[(k3-e).*(k3-e)+(s0+s3).*(s0+s3)].^(-1/2);>> x30=x3-10*j3;>> y30=y3-10*i3;>> a4=4*pi/3:pi/36:2*pi;>> s4=0;>> x4=(s0+s4).*sin(a4)+e*cos(a4);>> y4=(s0+s4).*cos(a4)-e*sin(a4);>> k4=0;>> i4=[(k4-e).*sin(a4)+(s0+s4).*cos(a4)].*[(k4-e).*(k4-e)+(s0+s4).*(s0+s4)].^(-1/2);>> j4=[-(k4-e).*cos(a4)+(s0+s4).*sin(a4)].*[(k4-e).*(k4-e)+(s0+s4).*(s0+s4)].^(-1/2);>> x40=x4-10*j4;>> y40=y4-10*i4;>> plot(x10,y10,'-g*',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*')>>plot(x10,y10,'-g*',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*',x1,y1,'-g*',x2,y2,'-r*',x3,y3,'-b*',x4,y4,'-k*')>>凸轮压力角:>> x=0:0.01:pi/3;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> xx =Columns 1 through 60 0.0100 0.0200 0.0300 0.0400 0.0500Columns 7 through 120.0600 0.0700 0.0800 0.0900 0.1000 0.1100Columns 13 through 180.1200 0.1300 0.1400 0.1500 0.1600 0.1700 Columns 19 through 240.1800 0.1900 0.2000 0.2100 0.2200 0.2300 Columns 25 through 300.2400 0.2500 0.2600 0.2700 0.2800 0.2900 Columns 31 through 360.3000 0.3100 0.3200 0.3300 0.3400 0.3500 Columns 37 through 420.3600 0.3700 0.3800 0.3900 0.4000 0.4100 Columns 43 through 480.4200 0.4300 0.4400 0.4500 0.4600 0.4700 Columns 49 through 540.4800 0.4900 0.5000 0.5100 0.5200 0.5300 Columns 55 through 600.5400 0.5500 0.5600 0.5700 0.5800 0.5900 Columns 61 through 660.6000 0.6100 0.6200 0.6300 0.6400 0.6500 Columns 67 through 720.6600 0.6700 0.6800 0.6900 0.7000 0.7100 Columns 73 through 780.7200 0.7300 0.7400 0.7500 0.7600 0.7700 Columns 79 through 840.7800 0.7900 0.8000 0.8100 0.8200 0.8300 Columns 85 through 900.8400 0.8500 0.8600 0.8700 0.8800 0.8900 Columns 91 through 960.9000 0.9100 0.9200 0.9300 0.9400 0.9500 Columns 97 through 1020.9600 0.9700 0.9800 0.9900 1.0000 1.0100 Columns 103 through 1051.0200 1.0300 1.0400>> tt =Columns 1 through 60.0000 0.3461 0.6925 1.0379 1.3809 1.7202 Columns 7 through 122.0546 2.3825 2.70283.0141 3.3150 3.6042 Columns 13 through 183.88044.1424 4.3889 4.6187 4.83075.0237 Columns 19 through 245.1967 5.3487 5.4788 5.5861 5.6698 5.7292 Columns 25 through 305.7636 5.7725 5.7555 5.7122 5.6422 5.5455 Columns 31 through 365.4219 5.2715 5.0944 4.8908 4.6610 4.4055 Columns 37 through 424.1248 3.8196 3.4906 3.1387 2.7647 2.3699 Columns 43 through 481.9552 1.5219 1.0714 0.6051 0.1243 -0.3692 Columns 49 through 54-0.8740 -1.3882 -1.9102 -2.4381 -2.9701 -3.5044 Columns 55 through 60-4.0388 -4.5716 -5.1008 -5.6243 -6.1401 -6.6464 Columns 61 through 66-7.1410 -7.6221 -8.0877 -8.5359 -8.9648 -9.3727 Columns 67 through 72-9.7578 -10.1184 -10.4528 -10.7596 -11.0372 -11.2843 Columns 73 through 78-11.4996 -11.6820 -11.8304 -11.9439 -12.0215 -12.0627 Columns 79 through 84-12.0668 -12.0335 -11.9623 -11.8531 -11.7059 -11.5207 Columns 85 through 90-11.2979 -11.0378 -10.7410 -10.4081 -10.0399 -9.6374 Columns 91 through 96-9.2016 -8.7339 -8.2356 -7.7081 -7.1530 -6.5722 Columns 97 through 102-5.9674 -5.3405 -4.6937 -4.0291 -3.3489 -2.6554Columns 103 through 105-1.9511 -1.2383 -0.5195>> x=0.46:0.001:0.47;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> xx =Columns 1 through 60.4600 0.4610 0.4620 0.4630 0.4640 0.4650Columns 7 through 110.4660 0.4670 0.4680 0.4690 0.4700>> tt =Columns 1 through 60.1243 0.0755 0.0266 -0.0225 -0.0717 -0.1210Columns 7 through 11-0.1704 -0.2199 -0.2696 -0.3193 -0.3692>> x=0.462:0.0001:0.463;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> xx =Columns 1 through 60.4620 0.4621 0.4622 0.4623 0.4624 0.4625Columns 7 through 110.4626 0.4627 0.4628 0.4629 0.4630>> tt =Columns 1 through 60.0266 0.0217 0.0168 0.0119 0.0070 0.0021Columns 7 through 11-0.0028 -0.0077 -0.0126 -0.0176 -0.0225>> z=[0 0.4625];>> y=[150/pi*(1-cos(6*z))-20].*[45.8+50*(3*z/pi-sin(6*z)/(2*pi))];>> y=[150/pi*(1-cos(6*z))-20]./[45.8+50*(3*z/pi-sin(6*z)/(2*pi))];>> yy =-0.4367 1.1121>> a=atan(y)a =-0.4117 0.8384>> a*180/pians =-23.5900 48.0382>>以上是计算推程压力角的临界值。
凸轮轮廓程序:>> e=20;s0=77.46;a1=0:pi/36:pi/3;s1=50*[3*a1/pi-sin(6*a1)/(2*pi)];x1=(s0+s1).*sin(a1)+e*cos(a1);y1=(s0+s1).*cos(a1)-e*sin(a1);k1=150/pi*[1-cos(6*a1)];>> i仁[(k1-e).*si n( a1)+(sO+s1).*cos(a1)].*[(k1-e).*(k1-e)+(sO+s1).*(sO+s1)]A(-1/2);>> j1=[-(k1-e).*cos(a1)+(s0+s1).*si n( a1)].*[(k1-e).*(k1-e)+(s0+s1).*(s0+s1)].^(-1/2); >> x1O=x1-1O*j1;>> y10=y1-10*i1;a2=pi/3:pi/36:pi;s2=50;x2=(s0+s2).*sin(a2)+e*cos(a2);y2=(s0+s2).*cos(a2)-e*sin(a2);k2=0;>> i2=[(k2-e).*si n( a2)+(s0+s2).*cos(a2)].*[(k2-e).*(k2-e)+(s0+s2).*(s0+s2)]A(-1/2);j2=[-(k2-e).*cos(a2)+(s0+s2).*si n( a2)].*[(k2-e).*(k2-e)+(s0+s2).*(s0+s2)].A(-1/2); x20=x2-10*j2;y20=y2-10*i2;>> a3=pi:pi/36:4*pi/3;>> s3=50*[1-3*(a3-pi)/pi+sin(6*(a3-pi))/(2*pi)];>> x3=(s0+s3).*sin(a3)+e*cos(a3);>> y3=(s0+s3).*cos(a3)-e*sin(a3);>> k3=50*[-3/pi+3/pi*cos(6*(a3-pi))];>> i3=[(k3-e).*si n( a3)+(s0+s3).*cos(a3)].*[(k3-e).*(k3-e)+(s0+s3).*(s0+s3)].A(-1/2);>> j3=[-(k3-e).*cos(a3)+(s0+s3).*si n( a3)].*[(k3-e).*(k3-e)+(s0+s3).*(s0+s3)].A(-1/2); >> x30=x3-10*j3;>> y30=y3-10*i3;>> a4=4*pi/3:pi/36:2*pi;>> s4=0;>> x4=(s0+s4).*sin(a4)+e*cos(a4);>> y4=(s0+s4).*cos(a4)-e*sin(a4);>> k4=0;>> i4=[(k4-e).*si n( a4)+(s0+s4).*cos(a4)].*[(k4-e).*(k4-e)+(s0+s4).*(s0+s4)].A(-1/2);>> j4=[-(k4-e).*cos(a4)+(s0+s4).*si n( a4)].*[(k4-e).*(k4-e)+(s0+s4).*(s0+s4)].A(-1/2); >> x40=x4-10*j4;>> y40=y4-10*i4;>> plot(x10,y10,'-g*',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*')>> plot(x10,y10,'-g*',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*',x1,y1,'-g*',x2,y2,'-r*',x3,y3,'-b*',x4,y4,'-k*')>>凸轮压力角:>> x=0:0.01: pi/3;>> t=5.76*si n(6*x)+6*x.*si n(6*x)+(2-2* pi/15)*cos(6*x)-2+2* pi/15;>> xColu mns 1 through 60 0.0100 0.0200 0.0300 0.0400 0.0500Colu mns 7 through 120.0600 0.0700 0.0800 0.0900 0.1000 0.1100Colu mns 13 through 180.1200 0.1300 0.1400 0.1500 0.1600 0.1700 Columns 19 through 240.1800 0.1900 0.2000 0.2100 0.2200 0.2300 Columns 25 through 300.2400 0.2500 0.2600 0.2700 0.2800 0.2900 Columns 31 through 360.3000 0.3100 0.3200 0.3300 0.3400 0.3500 Columns 37 through 420.3600 0.3700 0.3800 0.3900 0.4000 0.4100 Columns 43 through 480.4200 0.4300 0.4400 0.4500 0.4600 0.4700 Columns 49 through 540.4800 0.4900 0.5000 0.5100 0.5200 0.5300 Columns 55 through 600.5400 0.5500 0.5600 0.5700 0.5800 0.5900 Columns 61 through 660.6000 0.6100 0.6200 0.6300 0.6400 0.6500 Columns 67 through 720.6600 0.6700 0.6800 0.6900 0.7000 0.7100 Columns 73 through 780.7200 0.7300 0.7400 0.7500 0.7600 0.7700 Columns 79 through 840.7800 0.7900 0.8000 0.8100 0.8200 0.8300Columns 85 through 900.8400 0.8500 0.8600 0.8700 0.8800 0.8900Columns 91 through 960.9000 0.9100 0.9200 0.9300 0.9400 0.9500Columns 97 through 1020.9600 0.9700 0.9800 0.9900 1.0000 1.0100Columns 103 through 1051.0200 1.0300 1.0400>> tColumns 1 through 60.0000 0.3461 0.6925 1.0379 1.3809 1.7202Columns 7 through 122.0546 2.3825 2.70283.0141 3.3150 3.6042Columns 13 through 183.88044.1424 4.3889 4.6187 4.83075.0237Columns 19 through 245.1967 5.3487 5.4788 5.5861 5.6698 5.72925.7636 5.7725 5.7555 5.7122 5.6422 5.5455Columns 25 through 30Columns 31 through 365.4219 5.2715 5.0944 4.8908 4.6610 4.4055 Columns 37 through 424.1248 3.8196 3.4906 3.1387 2.7647 2.3699 Columns 43 through 481.9552 1.5219 1.0714 0.6051 0.1243 -0.3692 Columns 49 through 54-0.8740 -1.3882 -1.9102 -2.4381 -2.9701 -3.5044 Columns 55 through 60-4.0388 -4.5716 -5.1008 -5.6243 -6.1401 -6.6464 Columns 61 through 66-7.1410 -7.6221 -8.0877 -8.5359 -8.9648 -9.3727 Columns 67 through 72-9.7578 -10.1184 -10.4528 -10.7596 -11.0372 -11.2843 Columns 73 through 78-11.4996 -11.6820 -11.8304 -11.9439 -12.0215 -12.0627 Columns 79 through 84-12.0668 -12.0335 -11.9623 -11.8531 -11.7059 -11.5207 Columns 85 through 90-11.2979 -11.0378 -10.7410 -10.4081 -10.0399 -9.6374-9.2016 -8.7339 -8.2356 -7.7081 -7.1530 -6.5722 Columns 91 through 96Columns 97 through 102x =Columns 1 through 6Columns 7 through 11-5.9674 -5.3405 -4.6937 -4.0291 -3.3489 -2.6554Columns 103 through 105-1.9511 -1.2383 -0.5195 >> x=0.46:0.001:0.47;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> xColumns 1 through 6Columns 7 through 11>> tColumns 1 through 6Columns 7 through 11>> x=0.462:0.0001:0.463;>> t=5.76*sin(6*x)+6*x.*sin(6*x)+(2-2*pi/15)*cos(6*x)-2+2*pi/15; >> x0.4620 0.4621 0.4622 0.4623 0.4624 0.46250.46000.4610 0.4620 0.4630 0.4640 0.46500.46600.4670 0.4680 0.4690 0.47000.12430.0755 0.0266 -0.0225 -0.0717 -0.1210-0.1704 -0.2199-0.2696 -0.3193 -0.36920.4626 0.4627 0.4628 0.4629 0.4630>> tColumns 1 through 60.0266 0.0217 0.0168 0.0119 0.0070 0.0021Columns 7 through 11-0.0028 -0.0077 -0.0126 -0.0176 -0.0225>> z=[0 0.4625];>> y=[150/pi*(1-cos(6*z))-20].*[45.8+50*(3*z/pi-sin(6*z)/(2*pi))];>> y=[150/pi*(1-cos(6*z))-20]./[45.8+50*(3*z/pi-sin(6*z)/(2*pi))];>> y-0.4367 1.1121>> a=atan(y)-0.4117 0.8384>> a*180/pians =-23.5900 48.0382>>以上是计算推程压力角的临界值。

偏置直动尖端推杆盘型凸轮机构一、凸轮参数二、推杆运动规律进程段 余弦加速度运动进程段 S= H-H*(1-cos(pi*i/J1))/2 (00~900) 回程段 余弦加速度运动回程段 S= H*(1-cos(pi*i/J3))/2 (1800~2700) 凸轮廓线方程:)sin(*)()cos(*22J S E R J E X +-+= )sin(*)cos(*)(22J E J S E R Y -+-= 三、程序设计%凸轮机构参数E=10; %偏距H=50; %升程b=0:pi/10:2*pi;R=40; %基圆半径x2=R*cos(b); %基圆轮廓y2=R*sin(b);x1=10*sin(b);%偏心圆轮廓y1=10*cos(b);J1=90; %推程J3=90; %回程s0=sqrt(R^2-E^2);s1=(H/2)*(1-cos(pi*i/J1)); %推程,余弦加速度运动 s2=H*eig(eye(360))'; %停歇,s=Hs3=H-(H/2)*(1-cos(pi*i/J3));%回程,余弦加速度运动 s4(1,360)=0; %停歇,s=0 x(1,360)=0;y(1,360)=0;%凸轮机构循环代码for i=1:360if i>=270s(i)=0;elseif i>=180s(i)=H-H*(1-cos(pi*i/J1))/2;elseif i>=90s(i)=H;elses(i)=H*(1-cos(pi*i/J3))/2;endx(i)=E*cos(pi*i/180)+(s0+s(i))*sin(pi*i/180);y(i)=(s0+s(i))*cos(pi*i/180)-E*sin(pi*i/180); end%凸轮轮廓曲线figure(1)plot(x,y,'-r',x1,y1,'-b',x2,y2,'-g','linewidth',2); title('凸轮轮廓曲线');xlabel('x'),ylabel('y');axis([-80,120,-100,60]);grid on;%位移曲线figure(2)plot(s,'-r','linewidth',2);title('位移曲线');xlabel('转角'),ylabel('位移')axis([0,400,-10,60]);grid on;四、运行结果。
摘要配气机构是内燃机的重要组成部分,配气凸轮是决定配气机构工作性能的关键零件,如何设计和加工出具有合理型线的凸轮是整个配气系统设计中最为重要的问题。
文章首先对凸轮进行分段设计,然后利用最大速度和最大加速度位置基于高次方程凸轮运动规律设计通过Matlab软件进行凸轮型线的优化设计,根据摇臂比计算气门运动规律,然后通过变摇臂比对凸轮运动规律进行反求,借鉴高次方程的凸轮设计经验,得出一种凸轮设计的新方法,对气门运动规律进行优化设计,将新设计凸轮型线与原始凸轮型线进行对比,分析出新设计比原设计上在升程、速度和加速度方面所得到的提高,据此得出新设计对配气机构乃至整车所发挥的作用。
关键词:凸轮;高次方程;变摇臂比;优化设计ABSTRACTIt is the importance of the internal combustion engine to constitute part to go together with to annoy organization, go together with to annoy a cam is to decide to go together with the key spare parts of annoying the organization work function, how design and process to submit the cam of having the reasonable type line is the most important problem in the whole design that go together with to annoy system.The article carries on a cent to the cam first segment design, then make use of the biggest speed and the biggest acceleration position exercises according to Gao power distance cam the regulation design carry on a cam type through a Matlab software line of excellent turn a design, according to shaking an arm ratio to compute air valve sport regulation, then pass and change and shake arm compare exercise to the cam the regulation carry on anti- beg, draw lessons from Gao power distance of cam design experience, get a kind of cam design of new method, to air valve sport the regulation carry on excellent turn a design, will lately design a cam type the line and original cam type line carry on contrast and analyze lately design ratio original design up gain in the aspects of rising distance, speed and acceleration of exaltation, on these grounds get a new design to go together with to annoy organization is to the whole car develop of function.Key words: cam; high index number equality; proportion of changing; optimization design目录1绪论 (1)1.1配气凸轮结构形式及特点 (1)1.1.1等加速凸轮 (1)1.1.2组合多项式型 (2)1.1.3高次方凸轮 (2)1.1.4多项动力凸轮 (2)1.2配气机构动力特性计算模型 (3)1.2.1单质盆模型 (3)1.2.2二质量模型 (3)1.2.3多自由度模型 (3)1.2.4有限元模型 (3)1.3配气凸轮型线设计国内外研究现状 (4)1.4配气凸轮优化设计方法 (5)1.4.1静态优化设计 (6)1.4.2动态优化设计 (6)1.5凸轮优化设计总结 (7)1.6课题研究主要内容 (8)2基于高次方程凸轮型线设计 (9)2.1普通高次多项式凸轮型线的设计 (9)2.1.1缓冲曲线的设计 (10)2.1.2工作段运动曲线设计 (12)2.2高次多项式凸轮的新型设计方法 (14)2.3汽油发动机凸轮型线的改进设计 (15)2.3.1汽油机配气凸轮型线设计的原则 (15)2.3.2发动机进气凸轮的改进设计 (16)2.3.3改进凸轮型线设计的MATLAB实现 (17)2.4本章小结 (19)3基于高次方程的气门理想运动规律计算 (20)3.1气门设计理论基础 (20)3.2气门运动规律要素 (20)3.2.1气门有准确的配气相位 (20)3.2.2良好的充气性能 (20)3.2.3工作平稳 (20)3.3气门运动规律的设计 (21)3.4本章小结 (21)4利用变摇臂比反求凸轮型线 (22)4.1计算变摇臂比 (22)4.1.1摇臂的运动学分析 (22)4.1.2摇臂比的计算 (23)4.2确定凸轮的升程函数 (24)4.3分析原设计与变摇臂比设计 (24)4.4本章小结 (26)5总结与展望 (28)5.1总结 (28)5.2展望 (28)参考文献 (30)致谢 (32)1绪论近年来我国经济快速发展,人民生活水平迅速提高,我们对生活质量也提出了越来越高的要求。
附录11、用解析法设计凸轮2的实际轮廓曲线。
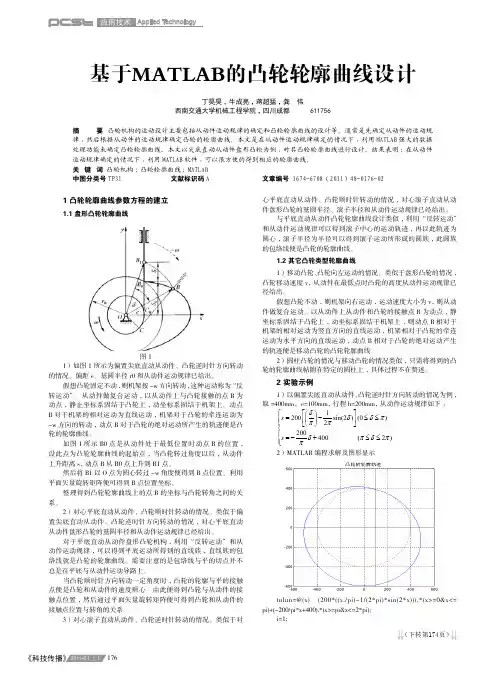
1、建立凸轮轮廓的数学模型。
图l 为往复式偏心从动件盘形凸轮的机构运动简图,B 为理论轮廓线上的任意一点,在图示的直角坐标系中,B 的坐标,即凸轮理论廓线上的直角坐标参数方程为:X=OE+EF=(S0+S )*Sin (J )+e*Cos (J )Y=BD – FD=(S0+S )*Cos (J ) – e*Sin (J )式中:X ,Y :凸轮理论廓线上的某一点坐标 (mm)e :从动件的偏心距(mm),OCR :凸轮的基圆半径(mm),OAS 0:220E R S -=(mm),CKJ :凸轮的转角 S :S =f(J)从动件运动方程,KBBC =CK 十KB =S 0十S因为工作廓线在法线方向的距离处处相等,且等于滚子半径r ’,故当已知理论廓线上的任意一点B(X,Y)时,只要沿理论廓线在该点的法线的方向取距离为r ’,即得到工作廓线上的相应点B ’(X ’,Y ’).由高等数学可知,理论廓线B 点处的法线n-n 的斜率(与切线斜率互为负倒数)应为 Tan a=-dx/dy=(dx/dJ)/(dx/dJ)/(-dy/dJ)=sina/cosa注: a 为理论廓线B 点处的法线和X 轴的夹角。
根据(1)(2)两式有dx/dJ=(ds/dJ-e)sin(J)+(s0+s)cos(J) (3)dy/dJ=(ds/dJ-e)cos(J)-(s0+s)sin(J) (4)可得Sin a=(dx/dJ)/((dx/dJ)^2+(dy/dJ)^2)^0.5 (5)Cos a=-(dy/dJ)/((dx/dJ)^2+(dy/dJ)^2)^0.5 (6)工作廓线上对应的点B ’(x ’,y ’)坐标为:x ’=x-r ’cos ay ’=y- r ’sin a2、 从动件运行规律:五次多项式运行规律从动件运动形式为:升—停—降—停型推程(升)δ1 远休止(停)δ2回程(降)δ3近休止(停)δ4 等加速等减速 S 1=10h(δ/δ1)^3-15h S 2=h等减速等加速 S 1=h-h(10(δ/δ3)^3-15(δ/δ3)^4+6(δ/δ3)^5) S 4=0图13、绘制凸轮曲线的程序框图(1)升回程运动函数的子程序框图(3)绘制凸轮轮廓的主程序框图定义升程的运行规律定义远休的运行规律定义回程的运行规律定义近休的运行规律绘制S-δ曲线(4)绘制S-δ曲线的程序框图4、程序编写(以下程序在Matlab7.0上运行通过)(1)升回程运动函数的子程序function y = s(x) %申明从动件运行规律函数deg=pi/180; %转化为弧度制的参数h=10; %从动件行程if (x<0)|(x>2*pi)error('Input Range error(0~2*pi)');elseif x<(60*deg)&(x>=0)y=h*(10*(x/(60*deg))^3-15*(x/(60*deg))^4+6*(x/(60*deg))^5);%升程运动规律elseif(x>=60*deg)&(x<70*deg)y=h;%远休运动规律elseif(x>=70*deg)&(x<130*deg)y=h-h*(10*((x-70*deg)/(60*deg))^3-15*((x-70*deg)/(60*deg))^4+6*((x-70*deg)/(60*deg))^5);%回程运动规律elsey=0;%近休运动规律endendendend(2)绘制ds/dδ运动函数的子程序function d=ds(x) %申明ds/dδ运行规律函数h=10; %凸轮2行程deg=pi/180;if (x<0)|(x>2*pi)error('Input Range error(0~2*pi)');elseif x<(60*deg)&(x>=0)d=h/(60*deg)*((30*(x/(60*deg))^2-60*(x/(60*deg))^3+30*(x/(60*deg))^4));%对S求导elseif(x>=60*deg)&(x<70*deg)d=0; %对S求导elseif(x>=70*deg)&(x<130*deg)d=-h/(60*deg)*((30*((x-70*deg)/(60*deg))^2-60*((x-70*deg)/(60*deg))^3+30*((x-70*deg)/(60* deg))^4));%对S求导elsed=0; %对S求导endendendend(3)绘制凸轮轮廓的主程序clear;i=1;r0=60; %基圆半径rr=4;%滚子圆半径e=0; %偏距eta=1; %凸轮顺时钉转向s0=(r0^2-e^2)^0.5;deg=pi/180;st=0.05*deg;%步长a=0;if a<2*pix(i)=(s(a)+s0)*sin(eta*a)-e*cos(eta*a);%定义理论轮廓线的X座标y(i)=(s(a)+s0)*cos(eta*a)+e*sin(eta*a); %定义理论轮廓线的Y座标dx=ds(a)*sin(eta*a)-eta*(s(a)+s0)*cos(eta*a)-e*eta*sin(eta*a);dy=ds(a)*cos(eta*a)+eta*(s(a)+s0)*sin(eta*a)-e*eta*cos(eta*a);sino=dx/(dx^2+dy^2)^0.5;coso=dy/(dx^2+dy^2)^0.5;X(i)=x(i)-rr*coso;%定义实际轮廓线的X座标Y(i)=y(i)+rr*sino;%定义实际轮廓线的Y座标i=i+1;a=a+st;endplot(x,y,X,Y);%绘制理论和实际轮廓线axis('square','equal');grid on主程序运行的结果为凸轮轮廓曲线:(4)绘制S-δ曲线的程序为:h=10;t1=linspace(0,60*pi/180); %定义升程角范围y1=h*(10*(t1/(60*deg)).^3-15*(t1/(60*deg)).^4+6*(t1/(60*deg)).^5); %升程运动规律t2=linspace(60*pi/180,70*pi/180); %定义远休角范围y2=h;%远休运动规律t3=linspace(70*pi/180,130*pi/180); %定义回程角范围y3=h-h*(10*((t3-70*deg)/(60*deg)).^3-15*((t3-70*deg)/(60*deg)).^4+6*((t3-70*deg)/(60*deg)). ^5); %回程运动规律t4=linspace(130*pi/180,360*pi/180); %定义近休角范围y4=0;%近休运动规律plot(t1,y1,t2,y2,t3,y3,t4,y4)%绘制S-δ曲线程序运行的结果为:。
凸轮轮廓及其综合1. 凸轮机构从动件的位移凸轮是把一种运动转化为另一种运动的装置。
凸轮的廓线和从动件一起实现运动形式的转换。
凸轮通常是为定轴转动,凸轮旋转运动可被转化成摆动、直线运动或是两者的结合。
凸轮机构设计的内容之一是凸轮廓线的设计。
定义一个凸轮基圆r b 作为最小的圆周半径。
从动件的运动方程如下:L(ϕ)=r b +s(ϕ)设凸轮的推程运动角和回程运动角均为β,从动件的运动规律均为正弦加速度运动规律,则有:s(ϕ)=h(βϕ-π21sin(2πϕ/β)) 0≤ϕ≤βs(ϕ)=h -h(ββϕ--π21sin(2π(ϕ-β/β)) β≤ϕ≤2βs(ϕ)=0 2β≤ϕ≤2π上式是从动件的位移,h 是从动件的最大位移,并且0≤β≤π。
如果假设凸轮的旋转速度ω=d ϕ/dt 是个常量,则速度υ、加速度a 和瞬时加速度j (加速度对时间求异)分别如下:速度:υ(ϕ)=βωh(1-cos(2πϕ/β)) 0≤ϕ≤β υ(ϕ)=-βωh(1-cos(2π(ϕ-β)/β) β≤ϕ≤2β υ(ϕ)=0 2β≤ϕ≤2π加速度:a(ϕ)=222βπωhsin(2πϕ/β)) 0≤ϕ≤βa(ϕ)=-222βπωhsin(2π(ϕ-β)/β) β≤ϕ≤2βa(ϕ)=0 2β≤ϕ≤2π瞬时加速度:j(ϕ)=3324βωπhcos(2πϕ/β)) 0≤ϕ≤βj(ϕ)=-3324βωπhcos(2π(ϕ-β)/β) β≤ϕ≤2βj(ϕ)=0 2β≤ϕ≤2π定义无量纲位移S=s/h 、无量纲速度V=υ/ωh 、无量纲加速度A=a/h ω3和无量纲瞬时加速度J=j/h ω3。
若β=60°,则如下程序可以对以上各个量进行计算。
beta=60*pi/180;phi=linspace(0,beta,40); phi2=[beta+phi]; ph=[phi phi2]*180/pi; arg=2*pi*phi/beta;arg2=2*pi*(phi2-beta)/beta;s=[phi/beta-sin(arg)/2/pi 1-(arg2-sin(arg2))/2/pi]; v=[(1-cos(arg))/beta-(1-cos(arg2))/beta]; a=[2*pi/beta^2*sin(arg)2*pi/beta^2*sin(arg2)];j=[4*pi^2/beta^3*cos(arg)4*pi^2/beta^3*cos(arg2)]:subplot(2,2,1) plot(ph,s,ˊK ˊ)xlabel(ˊCam angle(degrees)ˊ) ylabel(ˊDisplacement(S)ˊ) g=axis; g(2)=120; axis(g) subplot(2,2,2)plot(ph,v,ˊk ˊ,[0 120],[0 0],ˊk--ˊ) xlabel(ˊCam angle(degrees)ˊ) ylabel(ˊVelocity(V)ˊ) g=axis; g(2)=120; axis(g) subplot(2,2,3)plot(ph,a,ˊk ˊ,[0 120],[0 0],ˊk--ˊ) xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊAcceleration(A)ˊ)g=axis;g(2)=120;axis(g)subplot(2,2,4)plot(ph,j,ˊkˊ,[0 120],[0 0],ˊk--ˊ)xlabel(ˊCam angle(degrees)ˊ)ylabel(ˊJerk(J)ˊ)g=axis;g(2)=120;axis(g)2 平底盘形从动作参考下图得到如下关系:在(x,y)坐标系中,凸轮轮廓的坐标为Rx和Ry,刀具的坐标为Cx和Cy:Rx=Rcos( θ+ϕ) Ry=Rsin( θ+ϕ)C x=Ccos( γ+ϕ) C y=Ccos( γ+ϕ)其中,R=θcos Lθ=arctan ⎪⎪⎭⎫ ⎝⎛ϕd dL L 1 c=γγcos cL + γ=arctan ⎪⎪⎭⎫ ⎝⎛+c L d dL γϕ/ r c 是刀具的半径,且dL/d ϕ=V(ϕ)/ω。
matlab凸轮运动仿真课程设计一、课程目标知识目标:1. 学生能够理解凸轮运动的基本原理,掌握运用MATLAB进行凸轮运动仿真的方法。
2. 学生能够运用MATLAB软件构建凸轮运动模型,分析凸轮运动的特点及其在不同参数下的变化。
3. 学生能够掌握MATLAB中与凸轮运动相关的基本命令和函数,并运用这些工具进行数据分析和处理。
技能目标:1. 学生能够运用MATLAB软件设计简单的凸轮运动仿真程序,具备实际操作能力。
2. 学生能够通过MATLAB仿真实验,分析凸轮运动中的关键参数,并对其进行优化。
3. 学生能够独立解决在凸轮运动仿真过程中遇到的技术问题,具备一定的故障排查和问题解决能力。
情感态度价值观目标:1. 学生通过学习MATLAB凸轮运动仿真,培养对机械运动的兴趣和热情,增强对工程技术的认识。
2. 学生能够意识到理论知识与实际应用之间的联系,增强学以致用的意识。
3. 学生在团队协作中培养沟通与协作能力,学会尊重他人意见,共同解决问题。
本课程针对高年级学生,在掌握一定MATLAB基础知识和凸轮运动原理的基础上,以提高学生的实际操作能力和创新能力为目标。
课程注重理论与实践相结合,强调学生的主体地位,通过项目式教学,培养学生独立思考和解决问题的能力。
通过本课程的学习,使学生能够更好地将所学知识应用于实际工程问题中,提高综合运用知识的能力。
二、教学内容1. 凸轮运动原理回顾:简要复习凸轮机构的基本构成、运动特点及运动规律,重点回顾教材中关于凸轮运动分析的章节内容。
2. MATLAB软件基础:复习MATLAB的基本操作、编程语法和数据类型,为后续凸轮运动仿真打下基础。
3. 凸轮运动仿真方法:介绍MATLAB在凸轮运动仿真中的应用,包括建模、求解和结果分析等步骤,结合教材相关章节进行讲解。
4. MATLAB凸轮运动建模:详细讲解如何使用MATLAB软件构建凸轮运动模型,包括参数设置、函数调用和模型验证等。
matlab 凸轮课程设计一、教学目标本课程旨在通过MATLAB软件仿真,使学生掌握凸轮机构的基本原理和设计方法,提高学生运用数学模型解决工程实际问题的能力。
具体目标如下:1.知识目标:使学生了解凸轮机构的基本概念、类型和运动特性,掌握常用凸轮机构的运动规律和设计方法,理解MATLAB在凸轮设计中的应用。
2.技能目标:培养学生运用MATLAB进行凸轮机构仿真分析的能力,能够独立完成凸轮机构的运动规律分析、参数优化和设计。
3.情感态度价值观目标:培养学生对机械设计的兴趣,增强工程实践能力和创新意识,树立团队协作和终身学习的观念。
二、教学内容本课程的教学内容主要包括以下几个部分:1.凸轮机构的基本概念、类型和运动特性。
2.常用凸轮机构的运动规律和设计方法。
3.MATLAB在凸轮设计中的应用,包括凸轮机构的运动规律分析、参数优化和设计。
教学大纲安排如下:第1-2课时:凸轮机构的基本概念、类型和运动特性。
第3-4课时:常用凸轮机构的运动规律和设计方法。
第5-6课时:MATLAB在凸轮设计中的应用。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式,包括:1.讲授法:用于讲解凸轮机构的基本概念、类型和运动特性,以及常用凸轮机构的运动规律和设计方法。
2.案例分析法:通过分析实际案例,使学生更好地理解凸轮机构的设计和应用。
3.实验法:引导学生利用MATLAB软件进行凸轮机构的仿真实验,提高学生的实践操作能力。
四、教学资源为了支持本课程的教学,将准备以下教学资源:1.教材:《MATLAB凸轮设计教程》。
2.参考书:相关领域内的学术论文、专著等。
3.多媒体资料:课件、教学视频等。
4.实验设备:计算机、MATLAB软件等。
通过以上教学资源的支持,为学生提供丰富多样的学习体验,提高教学质量。
五、教学评估本课程的教学评估将采用多元化的评价方式,以全面、客观、公正地评估学生的学习成果。
评估方式包括:1.平时表现:通过课堂参与、提问、小组讨论等环节,评估学生的学习态度和课堂表现。
傅里叶级数在MATLAB中的应用一、概述1. 傅里叶级数的概念傅里叶级数是一种数学工具,可以将任意周期函数表示成一组正弦和余弦函数的线性组合。
这种表示方法在信号处理、图像处理、通信等领域有广泛的应用,是MATLAB中重要的数学工具之一。
2. MATLAB中傅里叶级数的应用MATLAB作为一种著名的科学计算软件,提供了丰富的工具箱和函数库,使得对傅里叶级数的计算和分析变得轻而易举。
本文将介绍MATLAB中傅里叶级数的基本概念和常见应用,以及其在凸轮设计中的具体应用。
二、MATLAB中的傅里叶级数表示1. 傅里叶级数的计算方法在MATLAB中,可以使用fft函数进行傅里叶级数的计算。
该函数能够将任意输入信号进行傅里叶变换,并返回频域的幅度和相位信息。
2. 傅里叶级数的应用场景傅里叶级数广泛应用于信号处理、图像处理和通信系统中。
在MATLAB中,可以利用傅里叶级数进行信号频谱分析、滤波器设计、频域滤波和频率域图像处理等方面。
三、MATLAB中傅里叶级数的小案例1. 信号频谱分析假设我们有一个周期为T的信号,可以使用MATLAB的fft函数对其进行傅里叶变换,得到其频率分量的幅度和相位信息,从而进行频谱分析。
2. 频域滤波在MATLAB中,可以利用傅里叶级数进行频域图像滤波,例如利用频率域掩膜对图像进行滤波和增强。
四、MATLAB在凸轮设计中的应用1. 凸轮的基本概念凸轮是一种机械传动装置,常见于发动机和机械运动系统中,用于控制阀门、汽缸盖和传动系统的运动。
凸轮的设计需要考虑到其运动曲线和周期性特征。
2. 傅里叶级数在凸轮设计中的应用在凸轮的设计中,可以利用傅里叶级数表示凸轮的运动曲线,从而进行凸轮的分析和设计。
MATLAB提供了丰富的函数和工具,可以对凸轮的运动特性进行傅里叶级数表示和分析,从而优化其运动特性。
五、结论1. MATLAB是一种强大的科学计算软件,提供了丰富的工具箱和函数库,使得对傅里叶级数的计算和分析变得十分便利。
首先看一下理论轮廓线的方程式X=(S0+S1)sinθ+ ecosθY= (S0+S1) cosθ+ esinθ式中,e为偏心距,S0=sqrt(r0^2-e^2),r0为偏心圆半径%先设置凸轮的基本参数,偏心距离e,基圆半径rb,滚轮半径rr,角速度w,推杆上升的最大行程h。
h=30;w=12;rb=50;e=12;rr=10;s0=sqrt(rb*rb-e*e);% 偏心距e=12,基圆rb=50,滚轮半径rr=10,角速度w=12,最大上升h=30q=120*pi/180;%这里我规定推程运动角为120度qs=(120+30)*pi/180;%远休止角为150度q1=(120+30+150)*pi/180;%回程运动角为300度for i=1:1:120 %将120度按1度均分,从而得到各个度数上的轮廓坐标qq(i)=i*pi/180.0;s1=(h*qq(i)/q)-(h/(2*pi))*sin(2*pi*qq(i)/q);v1=w*(h/q)-(w*h/q)*cos(2*pi*qq(i)/q);x(i)=(s0+s1)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i));%理论轮廓线的坐标a(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i)); %cos(i)b(i)=(s0+s1)*sin(qq(i))-e*cos(qq(i)); %sin(i)xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));%实际工作轮廓线的坐标endfor i=121:1:150qq(i)=i*pi/180;s2=h;v2=0;x(i)=(s0+s2)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i));b(i)=(s0+s2)*sin(qq(i))-e*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=151:1:300qq(i)=i*pi/180;qq1(i)=qq(i)-150*pi/180;s3=h-h*qq1(i)/(q1-qs);v3=-w*h/(q1-qs);x(i)=(s0+s3)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i));b(i)=(s0+s3)*sin(qq(i))-e*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=301:1:360qq(i)=i*pi/180;x(i)=(s0+0)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+0)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+0)*cos(qq(i))-e*sin(qq(i));b(i)=(s0+0)*sin(qq(i))-e*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)+rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endplot(x,y,'r',xx,yy,'g')%用plot函数绘制曲线text(0,20,'理论轮廓线')%理论轮廓线的坐标位于为(0,20)text(65,40,'实际轮廓线')%实际轮廓线的坐标位于(65,40)hold on附图:。
附录11、用解析法设计凸轮2的实际轮廓曲线。
1、建立凸轮轮廓的数学模型。
图l 为往复式偏心从动件盘形凸轮的机构运动简图,B 为
理论轮廓线上的任意一点,在图示的直角坐标系中,B 的坐
标,即凸轮理论廓线上的直角坐标参数方程为:
X=OE+EF=(S0+S )*Sin (J )+e*Cos (J )
Y=BD – FD=(S0+S )*Cos (J ) – e*Sin (J )
式中:
X ,Y :凸轮理论廓线上的某一点坐标 (mm)
e :从动件的偏心距(mm),OC
R :凸轮的基圆半径(mm),OA
S 0:220E R S -=(mm),CK
J :凸轮的转角 S :S =f(J)从动件运动方程,KB
BC =CK 十KB =S 0十S
因为工作廓线在法线方向的距离处处相等,且等于滚子半径r ’,故当已知理论廓线上的任意一点B(X,Y)时,只要沿理论廓线在该点的法线的方向取距离为r ’,即得到工作廓线上的相应点B ’(X ’,Y ’).由高等数学可知,理论廓线B 点处的法线n-n 的斜率(与切线斜率互为负倒数)应为 Tan a=-dx/dy=(dx/dJ)/(dx/dJ)/(-dy/dJ)=sina/cosa
注: a 为理论廓线B 点处的法线和X 轴的夹角。
根据(1)(2)两式有
dx/dJ=(ds/dJ-e)sin(J)+(s0+s)cos(J) (3)
dy/dJ=(ds/dJ-e)cos(J)-(s0+s)sin(J) (4)
可得
Sin a=(dx/dJ)/((dx/dJ)^2+(dy/dJ)^2)^0.5 (5)
Cos a=-(dy/dJ)/((dx/dJ)^2+(dy/dJ)^2)^0.5 (6)
工作廓线上对应的点B ’(x ’,y ’)坐标为:
x ’=x-r ’cos a
y ’=y- r ’sin a
2、 从动件运行规律:五次多项式运行规律
从动件运动形式为:升—停—降—停型
推程(升)δ1 远休止(停)δ2
回程(降)δ3
近休止(停)δ4 等加速等减速 S 1=10h(δ/δ1)^3-15h S 2=h
等减速等加速 S 1=h-h(10(δ/δ3)^3-15(δ/δ3)^4+6(δ/δ3)^5) S 4=0
图1
3、绘制凸轮曲线的程序框图
(1)升回程运动函数的子程序框图
(3)绘制凸轮轮廓的主程序框图
定义升程的运行规律定义远休的运行规律定义回程的运行规律定义近休的运行规律
绘制S-δ曲线
(4)绘制S-δ曲线的程序框图
4、程序编写(以下程序在Matlab7.0上运行通过)
(1)升回程运动函数的子程序
function y = s(x) %申明从动件运行规律函数
deg=pi/180; %转化为弧度制的参数
h=10; %从动件行程
if (x<0)|(x>2*pi)
error('Input Range error(0~2*pi)');
else
if x<(60*deg)&(x>=0)
y=h*(10*(x/(60*deg))^3-15*(x/(60*deg))^4+6*(x/(60*deg))^5);%升程运动规律else
if(x>=60*deg)&(x<70*deg)
y=h;%远休运动规律
else
if(x>=70*deg)&(x<130*deg)
y=h-h*(10*((x-70*deg)/(60*deg))^3-15*((x-70*deg)/(60*deg))^4+6*((x-70*deg)/(60*deg))^5);
%回程运动规律
else
y=0;%近休运动规律
end
end
end
end
(2)绘制ds/dδ运动函数的子程序
function d=ds(x) %申明ds/dδ运行规律函数
h=10; %凸轮2行程
deg=pi/180;
if (x<0)|(x>2*pi)
error('Input Range error(0~2*pi)');
else
if x<(60*deg)&(x>=0)
d=h/(60*deg)*((30*(x/(60*deg))^2-60*(x/(60*deg))^3+30*(x/(60*deg))^4));%对S求导else
if(x>=60*deg)&(x<70*deg)
d=0; %对S求导
else
if(x>=70*deg)&(x<130*deg)
d=-h/(60*deg)*((30*((x-70*deg)/(60*deg))^2-60*((x-70*deg)/(60*deg))^3+30*((x-70*deg)/(60* deg))^4));%对S求导
else
d=0; %对S求导
end
end
end
end
(3)绘制凸轮轮廓的主程序
clear;
i=1;
r0=60; %基圆半径
rr=4;%滚子圆半径
e=0; %偏距
eta=1; %凸轮顺时钉转向
s0=(r0^2-e^2)^0.5;
deg=pi/180;
st=0.05*deg;%步长
a=0;
if a<2*pi
x(i)=(s(a)+s0)*sin(eta*a)-e*cos(eta*a);%定义理论轮廓线的X座标y(i)=(s(a)+s0)*cos(eta*a)+e*sin(eta*a); %定义理论轮廓线的Y座标dx=ds(a)*sin(eta*a)-eta*(s(a)+s0)*cos(eta*a)-e*eta*sin(eta*a);
dy=ds(a)*cos(eta*a)+eta*(s(a)+s0)*sin(eta*a)-e*eta*cos(eta*a);
sino=dx/(dx^2+dy^2)^0.5;
coso=dy/(dx^2+dy^2)^0.5;
X(i)=x(i)-rr*coso;%定义实际轮廓线的X座标
Y(i)=y(i)+rr*sino;%定义实际轮廓线的Y座标
i=i+1;
a=a+st;
end
plot(x,y,X,Y);%绘制理论和实际轮廓线
axis('square','equal');
grid on
主程序运行的结果为凸轮轮廓曲线:
(4)绘制S-δ曲线的程序为:
h=10;
t1=linspace(0,60*pi/180); %定义升程角范围y1=h*(10*(t1/(60*deg)).^3-15*(t1/(60*deg)).^4+6*(t1/(60*deg)).^5); %升程运动规律
t2=linspace(60*pi/180,70*pi/180); %定义远休角范围y2=h;%远休运动规律
t3=linspace(70*pi/180,130*pi/180); %定义回程角范围y3=h-h*(10*((t3-70*deg)/(60*deg)).^3-15*((t3-70*deg)/(60*deg)).^4+6*((t3-70*deg)/(60*deg)). ^5); %回程运动规律
t4=linspace(130*pi/180,360*pi/180); %定义近休角范围y4=0;%近休运动规律plot(t1,y1,t2,y2,t3,y3,t4,y4)%绘制S-δ曲线
程序运行的结果为:。