移动机器人坐标定位方案_张成
- 格式:pdf
- 大小:1.39 MB
- 文档页数:2
移动机器人路径规划和轨迹跟踪算法在当今科技飞速发展的时代,移动机器人已经在众多领域得到了广泛的应用,从工业生产中的自动化物流搬运,到家庭服务中的智能清洁机器人,再到医疗领域的辅助手术机器人等等。
而要让这些移动机器人能够高效、准确地完成各种任务,关键就在于其路径规划和轨迹跟踪算法的有效性。
路径规划,简单来说,就是为移动机器人找到一条从起始点到目标点的最优或可行路径。
这就好像我们在出门旅行前规划路线一样,要考虑距离、路况、时间等诸多因素。
对于移动机器人而言,它所面临的环境可能更加复杂多变,比如充满障碍物的工厂车间、人员密集的商场等。
因此,路径规划算法需要具备强大的计算能力和适应能力。
常见的路径规划算法有很多种,比如基于图搜索的算法,像 A 算法。
A 算法通过对地图进行网格化,并为每个网格节点赋予一个代价评估值,从而逐步搜索出最优的路径。
它的优点是能够快速找到较优的路径,但在处理大规模地图时,计算量可能会较大。
还有基于采样的算法,如快速扩展随机树(RRT)算法。
RRT 算法通过在空间中随机采样,并逐步扩展生成树的方式来探索路径。
这种算法在高维空间和复杂环境中的适应性较强,但可能得到的路径不是最优的。
另外,基于人工势场的算法也是一种常用的方法。
它将目标点视为吸引源,障碍物视为排斥源,通过计算合力来引导机器人运动。
这种算法计算简单,但容易陷入局部最优。
轨迹跟踪则是在已经规划好路径的基础上,让机器人能够准确地按照预定的路径进行运动。
这就要求机器人能够实时感知自身的位置和姿态,并根据与目标轨迹的偏差进行调整。
在轨迹跟踪中,PID 控制器是一种常见的方法。
它通过比例、积分和微分三个环节的作用,对偏差进行修正。
PID 控制器简单易用,但对于复杂的非线性系统,其控制效果可能不够理想。
为了提高轨迹跟踪的精度和鲁棒性,现代控制理论中的模型预测控制(MPC)也得到了广泛应用。
MPC 通过预测未来一段时间内的系统状态,并优化控制输入,来实现更好的跟踪性能。
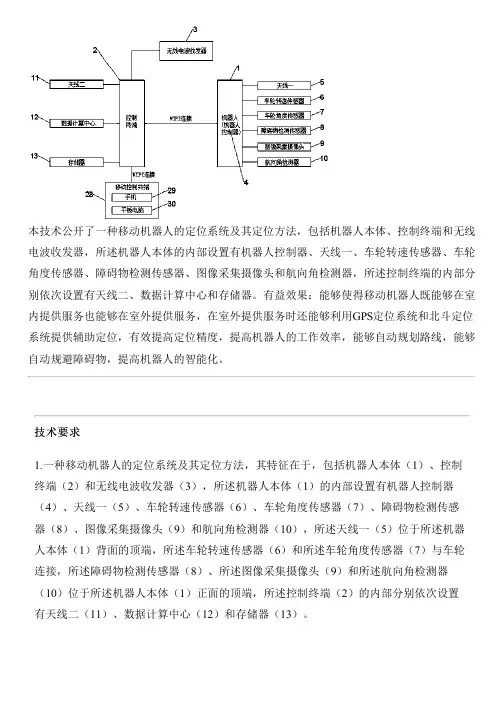
本技术公开了一种移动机器人的定位系统及其定位方法,包括机器人本体、控制终端和无线电波收发器,所述机器人本体的内部设置有机器人控制器、天线一、车轮转速传感器、车轮角度传感器、障碍物检测传感器、图像采集摄像头和航向角检测器,所述控制终端的内部分别依次设置有天线二、数据计算中心和存储器。
有益效果:能够使得移动机器人既能够在室内提供服务也能够在室外提供服务,在室外提供服务时还能够利用GPS定位系统和北斗定位系统提供辅助定位,有效提高定位精度,提高机器人的工作效率,能够自动规划路线,能够自动规避障碍物,提高机器人的智能化。
技术要求1.一种移动机器人的定位系统及其定位方法,其特征在于,包括机器人本体(1)、控制终端(2)和无线电波收发器(3),所述机器人本体(1)的内部设置有机器人控制器(4)、天线一(5)、车轮转速传感器(6)、车轮角度传感器(7)、障碍物检测传感器(8)、图像采集摄像头(9)和航向角检测器(10),所述天线一(5)位于所述机器人本体(1)背面的顶端,所述车轮转速传感器(6)和所述车轮角度传感器(7)与车轮连接,所述障碍物检测传感器(8)、所述图像采集摄像头(9)和所述航向角检测器(10)位于所述机器人本体(1)正面的顶端,所述控制终端(2)的内部分别依次设置有天线二(11)、数据计算中心(12)和存储器(13)。
2.根据权利要求1所述的一种移动机器人的定位系统及其定位方法,其特征在于,所述机器人控制器(4)的内部分别依次设置有机器人控制模块(14)、无线传输模块一(15)、车轮转速控制模块(16)、车轮角度修正模块(17)、障碍物检测模块(18)和图像采集模块(19),所述无线传输模块一(15)、所述车轮转速控制模块(16)、所述车轮角度修正模块(17)、所述障碍物检测模块(18)和所述图像采集模块(19)分别均与所述机器人控制模块(14)连接,所述控制终端(2)的内部分别依次设置有终端控制模块(20)、无线传输模块二(21)、路线规划模块(22)、障碍物规避模块(23)、机器人位置偏修正模块(24)、角度对比模块(25)、数据计算模块(26)和数据存储模块(27),所述无线传输模块二(21)、所述路线规划模块(22)、所述障碍物规避模块(23)、所述机器人位置偏修正模块(24)、所述角度对比模块(25)、所述数据计算模块(26)和所述数据存储模块(27)分别均与所述终端控制模块(20)连接。
移动机器人路径规划和轨迹跟踪算法在当今科技迅速发展的时代,移动机器人正逐渐成为各个领域的重要工具,从工业生产中的自动化运输,到医疗领域的服务机器人,再到家庭中的智能清洁设备,它们的身影无处不在。
而要让这些移动机器人能够高效、准确地完成任务,路径规划和轨迹跟踪算法就显得至关重要。
路径规划,简单来说,就是为移动机器人找到一条从起始点到目标点的最优或可行路径。
这就好像我们出门旅行,需要规划出一条既省时又省力的路线。
而轨迹跟踪,则是让机器人能够按照预定的路径或轨迹准确地移动,避免偏离“既定路线”。
在路径规划方面,有许多不同的方法和策略。
其中,基于地图的规划方法是比较常见的一种。
就好比我们在手机上使用地图导航,机器人也需要一个对其工作环境的“地图”认知。
这个地图可以是事先通过传感器获取并构建的,也可以是根据机器人在运行过程中的实时感知不断更新完善的。
例如,栅格地图法将工作空间划分为一个个小的栅格,每个栅格都有相应的状态标识,比如是否可通行。
通过对这些栅格的分析和计算,机器人就能找到可行的路径。
这种方法简单直观,但对于复杂环境可能会出现精度不够或者计算量过大的问题。
另外,还有基于几何形状的规划方法。
比如,利用圆形、矩形等简单几何图形来描述机器人和障碍物的形状和位置,通过几何运算来确定可行路径。
这种方法在一些规则环境中效果较好,但对于形状不规则的障碍物处理起来可能就比较棘手。
除了这些传统方法,近年来随着人工智能技术的发展,一些基于深度学习的路径规划算法也逐渐崭露头角。
通过让机器人学习大量的环境数据和路径样本,它能够自动生成适应不同环境的路径规划策略。
轨迹跟踪算法则致力于确保机器人能够精准地沿着规划好的路径移动。
常见的轨迹跟踪算法包括 PID 控制算法、模型预测控制算法等。
PID 控制算法是一种经典的控制算法,它通过比例、积分和微分三个环节的作用,来调整机器人的控制输入,从而使机器人的实际轨迹尽量接近预定轨迹。
移动机器人的路径规划与定位技术研究一、本文概述随着科技的飞速发展和智能化时代的到来,移动机器人技术逐渐成为研究和应用的热点。
移动机器人的路径规划与定位技术是实现其自主导航、智能避障和高效作业的关键。
本文旨在深入探讨移动机器人的路径规划与定位技术的相关理论、方法及其实际应用,以期为移动机器人的研究和发展提供有益的参考和启示。
本文首先将对移动机器人的路径规划技术进行全面梳理,包括基于规则的方法、基于优化算法的方法以及基于学习的方法等。
在此基础上,本文将重点分析各类路径规划算法的原理、特点及其适用场景,旨在为读者提供一个清晰、系统的路径规划技术框架。
本文将关注移动机器人的定位技术,包括基于传感器的方法、基于地图的方法以及基于视觉的方法等。
通过对各类定位技术的深入剖析,本文将揭示各种方法的优缺点,并探讨如何提高定位精度和稳定性,以满足移动机器人在复杂环境下的作业需求。
本文将结合实际应用案例,展示路径规划与定位技术在移动机器人领域的具体应用。
通过实例分析,本文旨在展示这些技术在实际应用中的价值,并为读者提供可借鉴的经验和启示。
本文旨在全面、系统地研究移动机器人的路径规划与定位技术,以期为推动移动机器人技术的发展和应用提供有益的参考和支持。
二、移动机器人路径规划技术研究移动机器人的路径规划技术是机器人领域中的一个核心问题,其目标是在复杂的环境中为机器人找到一条从起始点到目标点的最优或次优路径。
路径规划技术涉及到环境建模、路径搜索与优化等多个方面,是实现机器人自主导航的关键。
环境建模是路径规划的第一步,其目的是将机器人所在的实际环境转化为计算机可以理解和处理的数据结构。
常见的环境建模方法包括栅格法、拓扑法、特征法等。
栅格法将环境划分为一系列大小相等的栅格,每个栅格具有不同的属性(如可通行、障碍物等);拓扑法将环境抽象为一系列节点和连接这些节点的边,形成拓扑图;特征法则提取环境中的关键特征,如道路、交叉口等,进行建模。