电子论文-采用模糊控制的直流电机软启动及调速系统
- 格式:pdf
- 大小:341.06 KB
- 文档页数:4
模糊-PID混合控制技术在直流电机调速系统中的应用摘要:为了提高直流电动机调速系统性能,通过模糊pid控制方法和matlab软件的控制工具进行直流电动机调速系统的辅助设计。
关键词:pid控制;调速系统;模糊-pid混合控制;直流电机fuzzy-pid hybrid control technique for dc motor speed control systemzhang yufei(inner mongolia technical college of mechanics and electrics,hohhot 010070,china)abstract: in order to improve the system performance of dc motor speed control by fuzzy pid control and matlab software tool-aided design of the dc motor speed control system. keywords: pid control; speed control system; fuzzy-pid hybrid control; dc motor直流电机调速系统的应用于数控机床;工业生产;纺织、造纸、医疗、通讯等方面的加工生产设备;是工业化快速发展设备更新提速的关键环节之一。
模糊pid控制能够随着直流电机的运行变化控制电动机的速度。
比较常规的pid控制的参数不随控制对象的变化自行调整这一方面因素,具有更好的控制效果。
一、pid控制pid的解释是比例-积分-微分,也就是说自动控制技术的三个方面,测量、比较、执行,通过误差纠正的方式调节控制系统使其做出正确的反映。
比例控制(p):比例控制是对控制器输入与输出的误差建立比例关系,找到稳态误差。
积分控制(i):积分控制是对控制器输入与输出的误差信号积分建立比例关系,并建立积分项,随着时间的增加,积分项越来越大,误差也就越来越大,这样就随着误差的增加进行控制器的调整达到稳态误差。

基于模糊控制的直流电机速度调节系统设计直流电机是现代工业中常用的一种电动机类型,广泛应用于各种机械设备中。
为了满足对直流电机速度的调节要求,设计一个基于模糊控制的直流电机速度调节系统是非常必要的。
本文将详细介绍这个任务名称所描述的内容需求。
一、系统设计目标基于模糊控制的直流电机速度调节系统设计的目标是实现对直流电机转速的精确控制。
通过调节系统输入信号,控制直流电机的转速在给定的范围内保持稳定。
系统的设计应具备以下几个关键特点:1. 高精度:系统能够实现对直流电机转速的高精度控制,达到期望的转速值。
2. 高鲁棒性:系统能够应对外界干扰和模型参数不确定性,保持稳定的控制性能。
3. 快速响应:系统能够快速响应转速设定值的变化,并迅速稳定在新的转速值上。
4. 低震荡性:系统在控制过程中要尽量减小震荡和抖动,确保电机的稳定运行。
二、系统组成与原理基于模糊控制的直流电机速度调节系统主要由以下几部分组成:1. 传感器:用于实时监测直流电机的转速,并将转速信号反馈给控制系统。
2. 控制器:根据转速设定值和转速反馈信号,计算控制信号,调节直流电机的转速。
3. 功率放大器:将控制信号转化为直流电机的驱动信号,控制直流电机的运行。
4. 模糊推理系统:利用模糊逻辑来实现对转速设定值和转速误差的模糊推理和控制决策。
系统的工作原理如下:1. 传感器实时监测直流电机的转速,并将转速信号送入模糊控制系统。
2. 模糊推理系统根据转速设定值和转速反馈信号,通过模糊逻辑运算得到模糊控制规则。
3. 根据模糊控制规则,控制器生成控制信号,根据需要调节直流电机的转速。
4. 控制信号经过功率放大器转化为直流电机的驱动信号,控制直流电机的运行。
5. 反复进行转速监测、模糊推理和控制信号调节的过程,使直流电机保持稳定的转速。
三、系统设计步骤基于模糊控制的直流电机速度调节系统的设计步骤如下:1. 确定系统的性能要求:根据实际需求,确定直流电机转速的范围、精度要求等关键性能指标。

基于模糊控制算法的电机速度调节系统设计一、简介电机速度调节是工控领域中常见的控制问题之一。
本文基于模糊控制算法,设计了一个电机速度调节系统。
通过模糊控制算法,可以有效地控制电机的转速,提高系统的稳定性和响应速度。
本文将详细介绍电机速度调节系统的设计流程和关键步骤。
二、系统设计流程1. 系统建模首先,需要对电机系统进行建模。
根据系统的物理特性和控制要求,选取合适的数学模型来描述电机的动态特性。
常见的电机模型包括直流电机模型、交流感应电机模型等。
根据实际需求选择合适的电机模型,并进行参数估计。
2. 设计输入输出变量确定电机速度调节系统的输入输出变量。
输入变量通常为电机驱动电压或电流,输出变量为电机转速。
根据需要,还可以考虑其他辅助变量,如电机加速度、转矩等。
3. 模糊控制器设计设计模糊控制器是电机速度调节系统的关键步骤。
模糊控制器的任务是根据输入变量的模糊信息和输出变量的控制要求,生成合适的控制信号。
通常,模糊控制器由模糊规则库、模糊推理机和输出解模糊器组成。
其中,模糊规则库用于存储专家知识,模糊推理机根据输入变量的模糊信息和规则库进行推理,输出解模糊器将推理结果转换为具体的控制信号。
4. 性能评估和参数调优设计完成后,需要对系统性能进行评估和参数调优。
通常采用仿真和实验的方式进行性能评估。
通过调整模糊控制器的参数,使得系统的稳定性、响应速度和抗干扰能力达到最优。
三、关键技术和挑战1. 模糊规则库设计模糊规则库存储了专家知识,对于系统的性能起着关键作用。
规则库的设计需要根据实际情况进行,需要具有一定的经验和调试。
若规则库设计不当,会导致系统性能下降或不稳定。
2. 模糊推理机设计模糊推理机是模糊控制器的核心部分,对于系统的控制效果起着决定性作用。
推理机的设计需要考虑模糊化、聚类、规则匹配等处理步骤,并选择合适的推理方法。
推理机的设计需要充分考虑系统的动态特性和控制要求,以达到最佳效果。
3. 参数调优参数调优是确保系统性能优化的关键步骤。

基于模糊控制的直流调速系统设计一、引言直流调速系统是现代工业控制领域中广泛应用的一种电机调速方式。
通过改变电机的电压和电流,从而改变电机的转速,以达到控制电机输出功率的目的。
而模糊控制是一种基于模糊逻辑理论的控制方法,它可以处理模糊不确定性问题,在实际工程中得到了广泛应用。
本文将介绍基于模糊控制的直流调速系统设计。
二、直流调速系统原理直流调速系统主要由以下几个部分组成:功率源、整流器、滤波器、逆变器和负载等。
1. 功率源:直流调速系统中使用交流电源作为功率源,将交流电源通过整流器转换为直流电源供给逆变器。
2. 整流器:整流器主要作用是将交流电源转换为直流电源,常见的整形方式有单相半波整形、单相全波整形和三相桥式整形等。
3. 滤波器:滤波器主要作用是对整形后的脉动直流进行滤波处理,以获得更加稳定的输出信号。
4. 逆变器:逆变器主要作用是将稳定的直流电源转换为可调的交流电源,以控制电机的转速。
5. 负载:负载是指直流调速系统中需要控制的电机或其他设备。
三、模糊控制原理模糊控制是一种基于模糊逻辑理论的控制方法,它可以处理模糊不确定性问题,具有较强的鲁棒性和适应性。
模糊控制系统主要由以下几个部分组成:输入变量、输出变量、规则库和推理机等。
1. 输入变量:输入变量是指影响系统输出的各种因素,如温度、压力、湿度等。
2. 输出变量:输出变量是指控制系统输出的结果,如电机转速、温度等。
3. 规则库:规则库是由专家知识和经验构成的一组if-then规则,用于描述输入与输出之间的关系。
4. 推理机:推理机根据输入变量和规则库进行推理计算,并产生相应的输出结果。
四、基于模糊控制的直流调速系统设计基于模糊控制的直流调速系统设计主要包括以下几个步骤:1. 系统建模:根据直流调速系统原理,建立数学模型,并确定输入变量和输出变量。
2. 规则库设计:根据专家知识和经验,设计一组if-then规则,用于描述输入与输出之间的关系。

基于模糊控制的直流电机调速系统研究直流电机广泛应用在工程领域中,因其结构简单、容易传动,而且不需要高压力,能量损失小,控制方便等特点,特别是在自动化控制的领域中,被广泛应用。
直流电机控制的关键是调速控制。
在传统的调速系统中,常使用PID控制器。
但是PID控制器在实际应用中存在着参数难以调节和多变量控制问题,其调节参数和响应速度都比较缓慢,控制精度也不高。
因此,一种更先进的控制方法是模糊控制。
模糊控制作为一种新兴的控制方法,其基本思想是将自然语言中含有模糊性的描述通过量化的方式转换成一定的数学模型,然后利用模型对以前经验进行归纳和总结,来实现控制。
模糊控制将实际工程领域的控制对象和控制系统进行了有效的集成,能够有效地克服常规控制策略中的不足,并取得良好的控制效果。
本文的研究对象是基于模糊控制的直流电机调速系统。
文章分为以下几个章节:一、直流电机调速原理与方法在直流电机调速中,电源电压和电机负载通常是一个不确定的变量,所以我们需要一个能够自适应负载变化的控制器。
PID控制器是传统的调速控制器,但由于其参数难以调节和多变量控制问题,所以模糊控制逐渐被应用和发展。
二、模糊逻辑控制器设计模糊逻辑控制器的设计需要包括输入变量、输出变量、模糊化、规则库、推理机和解模糊等几个方面。
其中,输入变量有直流电机速度误差和误差变化率两个量;输出变量为直流电机控制信号。
将输入量通过模糊化变为隶属度函数,再针对性地选择规则库和隶属度函数,使用Min-Max合成或Mamdani合成等模糊推理方法,输出的模糊控制信号最终以解模糊过程得到实际控制信号。
三、模型运行仿真结果分析在模型仿真中,我们设置调速速度范围并进行仿真验证。
通过对仿真的结果进行分析,可以发现,模糊控制具有优秀的实时性和适应性,能够更快地控制电机转速,并且具有较高的控制精度和鲁棒性。
四、模型参数优化模糊逻辑控制器的优化需要对隶属函数、规则库、推理方法和解模糊方法等方面进行研究。
基于模糊逻辑的电机智能调速系统哎呀,一看到“基于模糊逻辑的电机智能调速系统”这个标题,我这心里就开始翻腾啦!你说这电机调速,好像离咱们日常生活有点远,但其实细想想,还真不是那么回事儿。
我记得有一次去工厂参观,那是一个生产各种机械零件的大厂子。
我在车间里走着,就看到一排排巨大的电机在呼呼地转着。
当时我就好奇,这电机的速度是怎么控制的呀?后来了解到,传统的电机调速方式往往比较生硬,就像我们小时候骑自行车,只有几个固定的挡位,切换起来不那么顺畅。
但基于模糊逻辑的电机智能调速系统可就大不一样啦!这个系统就像是一个特别聪明的“大脑”,它能感知到电机工作时的各种情况。
比如说负载的变化,就像是你骑车时突然带上了一个大胖子,或者是遇上了大坡。
传统的调速可能会反应迟钝,让你累得够呛。
但这个智能调速系统能迅速察觉到,然后马上调整电机的速度,让工作始终保持在一个比较理想的状态。
想象一下,一台电机正在带动一条生产线运转,突然产品数量增多了,负载变大了。
这时候,智能调速系统马上发挥作用,加快电机转速,保证生产效率不受影响。
而且它调整的过程特别平滑,不会有那种突然加速或者减速的颠簸感。
还有啊,这个系统的适应性也特别强。
不同的工作环境、不同的任务需求,它都能灵活应对。
就像一个全能的运动员,不管是短跑、长跑还是跳远,都能出色发挥。
它在节能方面也有一手。
能根据实际需要精准地控制电机速度,避免了不必要的能源浪费。
这就好比我们在家里,该开灯的时候开灯,不该开的时候就关上,省电费嘛!总的来说,基于模糊逻辑的电机智能调速系统就像是给电机装上了一颗超级聪明的“芯”,让电机变得更聪明、更高效、更节能。
咱再回到最开始我去的那个工厂,要是当时就有这么先进的调速系统,那生产效率肯定还能再上一个台阶,工人们也能更轻松一些。
说不定生产出来的零件质量还能更好呢!所以说呀,这基于模糊逻辑的电机智能调速系统,虽然名字听起来有点深奥,但实实在在地能给我们的生产生活带来巨大的改变和好处。
基于模糊控制的直流电机调速系统毕业设计论文毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于模糊控制的电机调速系统设计电机调速,这可是个有点复杂但又超级有趣的事儿!咱们今天就来聊聊基于模糊控制的电机调速系统设计。
先来说说我曾经遇到的一件事。
有一次,我去一个工厂参观,看到那些巨大的电机在运转。
其中有一台电机不知道咋回事,速度一会儿快一会儿慢,就像个调皮的孩子,完全不听指挥。
工人们急得团团转,因为这严重影响了生产效率。
这让我深刻地意识到,一个稳定、高效的电机调速系统是多么重要!那到底啥是模糊控制呢?简单来说,它就像是一个聪明的“指挥官”,不需要精确的数学模型,而是根据一些模糊的规则和经验来做出决策,从而控制电机的速度。
在这个设计中,咱们得先搞清楚电机的工作原理。
电机就像一个大力士,它的速度取决于输入的电流和电压等因素。
而模糊控制呢,就是要巧妙地调整这些输入,让电机按照我们想要的速度乖乖运转。
比如说,我们设定了一个目标速度。
如果实际速度比目标速度慢了,模糊控制器就会“下令”增加输入的电流或者电压,让电机加把劲;要是实际速度太快了,它又会“喊停”,减少输入,让电机慢下来。
那模糊控制器是怎么做出这些决定的呢?这就得靠我们给它设定的一些规则了。
这些规则可不是那种死板的数学公式,而是类似于“如果速度差比较大,就大幅度增加输入”这样的模糊表述。
为了实现这些规则,我们还得有传感器来监测电机的实际速度。
这些传感器就像电机的“眼睛”,时刻盯着它的一举一动,然后把信息传递给模糊控制器。
接下来就是设计模糊控制器的算法啦。
这可有点像炒菜,各种调料的比例要恰到好处,才能做出美味的菜肴。
算法中的参数调整也得精心琢磨,不然电机调速的效果可就大打折扣了。
还有啊,别忘了考虑系统的稳定性和抗干扰能力。
万一有个什么电压波动或者负载变化,咱这调速系统可不能乱了阵脚。
在实际设计中,还得不断地进行试验和优化。
就像做一件衣服,刚开始可能不太合身,得不断修改剪裁,才能变得完美。
比如说,有一次我在实验室里调试一个电机调速系统,怎么调都达不到理想的效果。
1 绪论直流电动机经常被当做限制元件来运用,离生活越来越近。
PID限制法是限制直流电机常用的方法。
在有些状况下,限制器都是在对象有精确数学模型的基础上建立起来的[1]。
如今探讨的限制系统中将会经常涉及到多变量、非线性、时变的系统,在这种状况下,要建立数学模型也是特殊困难的,或者根本不能建立模型。
传统的限制理论迎来了新的挑战。
一种可以处理语言信息实力的模糊限制理论的提出克服了上面的问题。
在模糊限制理论的基础上设计出了模糊限制器,而且它能够仿照操作员工的手动限制。
这种模糊限制器对已知受控对象的数学模型无明确的要求,但需留意:模糊限制器对已知被控对象的数学模型无明确的要求,并不是在对受控对象无了解的状况下提出的[2]。
恰恰相反,它照旧须要对受控对象有确定的了解,只不过它们是以学问的模型的形式而并不是用数学模型表达的。
所以,在直流电动机中应用模糊限制对现代生活有着重大的意义,也是一个里程碑。
2 前言随着时代的发展,沟通和直流调速不断冲击着,但是我国在这个直流调速领域中的探讨不断深化,专家们研制出了全数字直流调速系统[3]。
这个调速系统有着较高的精度,而且很好用。
直流调速系统有稳速、调速和加减速这个三种限制要求。
在目前的限制过程中,对于调速和加减速已经得到了良好的实现,但是在生产过程中稳速的效果不是很志向。
稳速须要的是电机在确定的精度以所规定的的转速稳定运行,在某些干扰下,转速波动也不会有大的变更。
在某些状况下,受控对象和负载参数的变更很快,使得PID调整器没方法刚好适应,因此稳速的要求很难达到标准。
直流电动机本身是一个非线性的被限制对象,有许多的间隙性和弹性的扰动存在,假如有许多的变更量,PID调整器将无法顾及。
以致最终的设计结果不能达到设计时所需的要求,将会得到鲁棒性较差的限制系统。
在这样的系统中常规的PID经常不能有效地克服负载、非线性因素和模型参数的变更因而无法达到高精度和快响应的要求。
所以在生产过程中这种限制器很难满足生产要求。
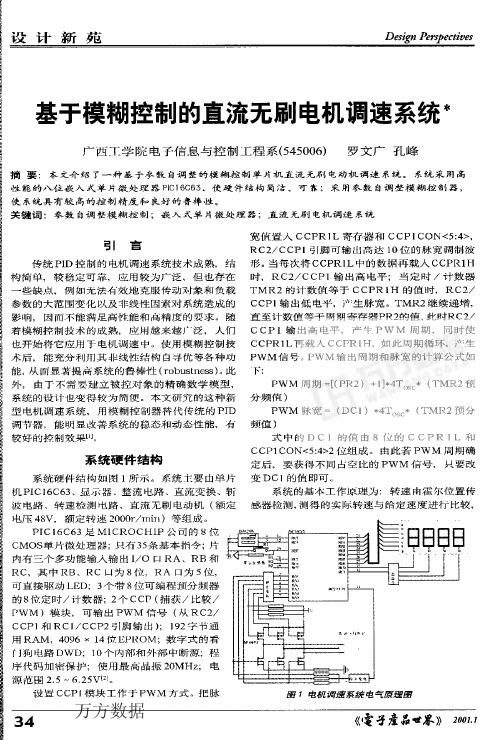
文章编号:1009-3486(2007)05-0073-04采用模糊控制的直流电机软启动及调速系统①孟凡友1,王启兴2,让余奇1,吴 强1(1.海军工程大学电气与信息工程学院,武汉430033;2.海军驻434厂军事代表室,广西柳州545006)摘 要:介绍了以单片机为核心的直流电机软启动及调速系统,系统采用模糊控制策略,将转速偏差与偏差率模糊化并作为模糊控制器的输入量,根据所制定的模糊控制规则生成控制量。
实验结果表明,该系统启动时间可以根据需要调整,具有良好的静态和动态性能。
关键词:模糊控制;单片机;软启动;调速中图分类号:TM33 文献标志码:ADC motor soft startup and variable speed system with f uzzy controllerM EN G Fan 2you 1,WAN G Qi 2xing 2,RAN G Yu 2qi 1,WU Qiang 1(1.College of Elect rical and Information Engineering ,Naval Univ.of Engineering ,Wuhan 430033,China ;2.Naval Representative Office in Plant No.434,Liuzhou 545006,China )Abstract :This paper int roduces a DC motor soft start up and a variable speed system based on t he sin 2gle chip.This system adopt s t he f uzzy cont rol strategy and uses rotate speed error and error variabili 2ty as f uzzy state variables.The cont rol variables are p roduced according to a set of f uzzy rules.The experiment result s show t hat t he start up time can be adjusted as required and t he cont roller has good static and dynamic characteristics.K ey w ords :f uzzy cont rol ;single chip ;soft start up ;variable speed在电机控制过程中,使用调节器必须根据受控对象的数学模型,应用控制理论正确调节调节器的各个参数才能取得好的效果。
但由于控制对象变化的随机性和复杂性,一般很难推导出合适的数学模型,同时由于控制参数多,各个参数之间的相互影响,难以取得最好的效果。
随着控制技术的发展,出现了一种基于控制理论的智能型调节器,即:采用模糊控制原理,设计一套调节器控制规则,不需要用户调节参数,只需在调节器中接入模糊控制器即可[1,2]。
这种模糊控制是基于人的控制经验,因而效果较为理想。
1 直流电机模糊控制调速系统的组成电机调速系统组成如图1所示。
其中:Y d 表示给定转速;Y (t )表示实际转速;e (t )=Y (t )-Y d 表示偏差;G e ,G c 表示比例因子;C (t )表示模糊控制量;G u 表示放大因子;u (t )表示控制量。
直流电机调速模糊控制系统由检测电路、数模转换电路和功率驱动电路等组成,其核心是模糊控制器,实验中采用单片机作为模糊控制器控制直流电机[3,4]。
控制过程是采用给定初值,通过反馈电路测出转速的偏差及偏差变化率输入给模糊控制器,作为模糊控制的依据,根据模糊控制器输出的控制量, 第19卷 第5期 2007年10月 海军工程大学学报 J OURNAL OF NAVAL UN IV ERSIT Y OF EN GIN EERIN G Vol.19 No.5 Oct.2007 ①收稿日期:2007203225;修回日期:2007207205。
作者简介:孟凡友(19632),男,工程师,硕士。
图1 电机模糊控制调速系统结构图去控制功率驱动电路,从而使直流电机按照最佳的运转状态工作,以达到最佳的调速效果[5]。
2 模糊控制器的设计直流电机调速模糊控制系统的工作过程是根据检测到的转速值,计算速度偏差和偏差率。
由于此时的转速偏差和偏差率是精确值,需要经过模糊化处理,得到模糊量。
而模糊控制器根据输入变量(模糊量),按照模糊推理规则,计算得到控制量(模糊量)。
最后,把模糊控制量去模糊处理变为精确量,去控制直流电机的运转,其核心是模糊控制器的实现。
模糊控制器的实现步骤如下。
(1)确定输入与输出变量的模糊子集和论域及隶属度在模糊控制直流电机调速系统中,采用负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)5个模糊状态描述转速偏差E。
相应的论域为:E={-3,-2,-1,0,1,2,3}。
转速偏差E的隶属函数表如表1所示。
表1 转速偏差E的隶属函数表-3-2-10123NB10.500000NS00.510.5000ZO000.510.500PS0000.510.50PB000000.51 同理,采用负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)5个模糊状态描述转速偏差率E c。
相应的论域为:E c={-3,-2,-1,0,1,2,3}。
转速偏差率E c的隶属函数表同表1。
采用负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)5个模糊状态描述模糊决策C。
相应的论域为:C={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,}。
模糊决策C的隶属函数表如表2所示。
表2 模糊决策C的隶属函数表-6-5-4-3-2-10123456 NB10.500000000000NS000.510.500000000ZO000000.510.500000PS000000000.510.500PB000000000000.51 (2)确定模糊控制规则根据输入量E,E c和输出量C,总结在直流电机调速试验中所掌握的经验,得到模糊控制规则。
直流电机调速系统的模糊控制可总结为如下控制规则表(见表3)。
表3 直流电机调速系统的模糊控制规则表NB NS ZO PS PB NB PB PB PB PS ZO NS PB PS PS ZO NS ZO PB PS ZO NS NBNB NS ZO PS PB PS PS ZO NS NS NB PB ZO NS NB NB NB・47・海 军 工 程 大 学 学 报 第19卷 (3)推理关系由模糊数学知识可知,双输入、单输出控制系统的模糊关系为:R i =E i ×E c i ×C iR =∪ni =1R i =∪ni =1(E i ×E c i ×C i ) (4)计算采样时刻的偏差和偏差率偏差:e (t )=Y (t )-Y d偏差率:e c (t )=e (t )-e (t -1)=Δe (t )e (t )和e c (t )均为精确值,需经过模糊化处理得到模糊量E (t )和E c (t )。
(5)偏差和偏差率的模糊化用精确值e (t )和e c (t )分别乘以两个比例因子1/G e 和1/G c ,即可得到模糊量E (t )和E c (t )。
设转速的偏差范围为[-90,90],偏差率的范围为[-9,9],设计的模糊论域为[-3,3],则可得到:偏差比例因子G e =90/3=30;偏差率比例因子G c =9/3=3。
模糊化得:E (t )=e (t )/G e ;E c (t )=e c (t )/G c 。
由于模糊论域只取了-3到3之间的整数,因而对于结果为非整数的变量,采取四舍五入就近取整的原则将其整数化。
表4表示偏差及偏差率的模糊化。
表4 偏差及偏差率的模糊化偏 差偏差率e ≥75375>e ≥45245>e ≥15115>e >-150-15≥e >-45-1-45≥e >-75-2-75≥e-3偏 差偏差率e ≥7.537.5>e ≥4.524.5>e ≥1.511.5>e >-1.50-1.5≥e >-4.5-1-4.5≥e >-7.5-2-7.5≥e-3 (6)进行模糊决策模糊直流电机调速系统根据某一时刻采样得到的两个模糊输入量进行推理判断,结果给出一个控制量。
其推理公式为:C (t )=[E (t )×E c (t )].R 。
(7)模糊判决(将控制量去模糊化)模糊判决的方法较多,常用的有:最大隶属度法、取平均值法和加权平均法,这里采用加权平均法,其推理公式为:C (t )=∑μ(x i)×x i∑μ(x i) 在模糊控制系统运行时,控制器需要进行模糊化、模糊推理和逆模糊化等运算,按上述过程在线运算时,需要很长时间,所以通过离线运算,并经大量实验调整,产生一个模糊控制总表(见表5)。
这样,可以通过偏差、偏差率的离散等级直接读取控制量的增量。
表5 模糊控制总表C-3-2-10123-36632100-2552110-1-144310-1-203310-1-3-31210-1-3-4-4210-1-1-2-5-53-1-2-3-6-63 实验及结果分析实验系统为采用单片机作为模糊控制器的PWM 调速系统[6],采用的是他励直流电机,电机的额定・57・ 第5期 孟凡友等:采用模糊控制的直流电机软启动及调速系统 电压为43V ,额定电流为6.98A ,容量为0.3kW ,额定转速为2100r/min 。
初步实验时,发现速度显示值总在给定值±5转的范围内波动,由实验得到的数据,结合软件归纳发现,送入D/A 转换器的数字量每加1,D/A 输出增加约5mV ,电机转速变化约4~5转,所以电机不能相对稳定。
经过调整TL C5615的基准输入电压,由原来的2.5V 降低为2.0V ,电机就能很好地稳定在要求的误差范围内。
最终实验结果,电机在转速低于200r/min 时,调速误差在给定值的1%左右;大于200r/min 、小于2100r/min 时,调速误差在给定值的0.5%以下,且调速时超调量很小,从开始调速至稳定运行的时间不超过1s 。
图2(a )为设定启动时间2s 的起点过程,图2(b )为转速2000r/min 到1450r/min 的调速过程。