机械发明专利案例
- 格式:pdf
- 大小:227.47 KB
- 文档页数:16
![一种液压式支护机械装置[发明专利]](https://img.taocdn.com/s1/m/42bea5c04b73f242326c5fae.png)
专利名称:一种液压式支护机械装置专利类型:发明专利
发明人:王建卫
申请号:CN201310638619.0
申请日:20131204
公开号:CN104695985A
公开日:
20150610
专利内容由知识产权出版社提供
摘要:一种液压式支护机械装置,其特征在于:所述的液压式支护机械装置包括液压缸、滑槽、铰接杆、铰接台、铰轮、支撑架;其中:支撑架支撑着铰接台,铰接台的两端分别设置有带有铰接端头铰轮,所述铰轮探出铰接台的对应侧边,铰轮铰接铰接杆后,可以保证相邻两的液压缸之间留有一定的间隙,在液压受到不同压力时,两铰轮可相互转动,从而可以保证铰接台与液压缸相互之间不会出现硬性的损伤,使液压及铰接台可以适应不同的压力。
本发明的优点:本发明所述的液压式支护机械装置,使用寿命长,节约资源,降低生产成本,作业效率高,适应性强,适于推广。
申请人:王建卫
地址:110004 辽宁省沈阳市和平区彩塔街30号3-5-1
国籍:CN
更多信息请下载全文后查看。
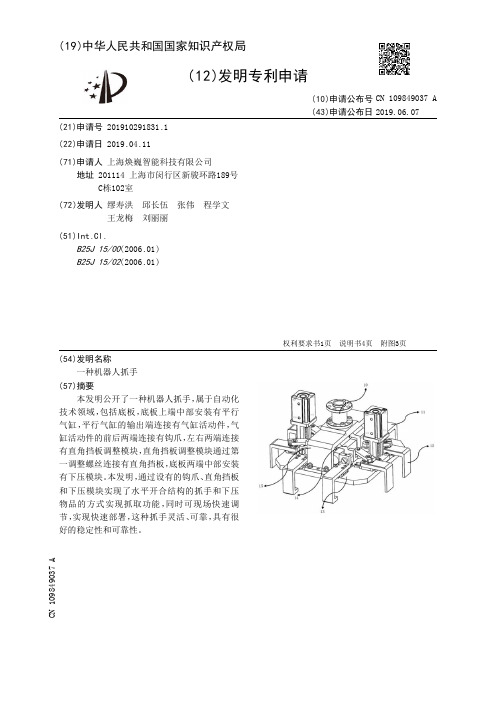
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910291831.1(22)申请日 2019.04.11(71)申请人 上海焕巍智能科技有限公司地址 201114 上海市闵行区新骏环路189号C栋102室(72)发明人 缪寿洪 邱长伍 张伟 程学文 王龙梅 刘丽丽 (51)Int.Cl.B25J 15/00(2006.01)B25J 15/02(2006.01)(54)发明名称一种机器人抓手(57)摘要本发明公开了一种机器人抓手,属于自动化技术领域,包括底板,底板上端中部安装有平行气缸,平行气缸的输出端连接有气缸活动件,气缸活动件的前后两端连接有钩爪,左右两端连接有直角挡板调整模块,直角挡板调整模块通过第一调整螺丝连接有直角挡板,底板两端中部安装有下压模块。
本发明,通过设有的钩爪、直角挡板和下压模块实现了水平开合结构的抓手和下压物品的方式实现抓取功能,同时可现场快速调节,实现快速部署,这种抓手灵活、可靠,具有很好的稳定性和可靠性。
权利要求书1页 说明书4页 附图3页CN 109849037 A 2019.06.07C N 109849037A权 利 要 求 书1/1页CN 109849037 A1.一种机器人抓手,包括底板(13),所述底板(13)上端中部安装有平行气缸(20),其特征在于,平行气缸(20)的输出端连接有气缸活动件(14),气缸活动件(14)的前后两端连接有钩爪(11),左右两端连接有直角挡板调整模块(16),所述直角挡块调整模块(16)包括第二调整螺丝(161)、偏心转轴(162)、连杆(163)和转轴(164),所述连杆(163)一端通过转轴(164)连接有气缸活动件(14),另一端通过第二调整螺丝(161)和偏心转轴(162)连接有直角挡板(12),直角挡板调整模块(16)通过第一调整螺丝(17)连接有直角挡板(12),所述底板(13)两端中部安装有下压模块(18),所述下压模块(18)包括下压气缸(181)、固定螺母(182)、推杆(183)、弹簧(184)、固定螺丝(185)和铜套(186),所述下压气缸(181)下端连接有活塞杆(1811),活塞杆(1811)上设有螺纹孔,所述推杆(183)与活塞杆(1811)通过螺纹方式连接,所述推杆(183)中部外侧设有弹簧(184),且弹簧(184)上端连接有固定螺母(182),所述铜套(186)通过固定螺丝(185)连接于推杆(183)底部。

专利保护在制造业中的应用案例分析作为一种重要的知识产权保护手段,专利在制造业中的应用日益受到重视。
专利保护可以帮助企业保护技术创新成果,提高竞争优势,促进技术进步和产业发展。
本文将通过分析几个在制造业中的专利应用案例,探讨专利保护对企业的重要意义。
案例一:XXX公司的创新产品专利保护XXX公司是一家制造业企业,致力于开发和生产机械设备。
该公司在产品设计和制造方面具有独特的技术优势,为了保护自己的技术创新成果,他们积极申请了相关的专利。
以XXX公司开发的一款新型机械设备为例,通过申请发明专利,他们成功地保护了产品的核心技术,获得了市场的独家权利。
这不仅帮助XXX公司在市场上建立了良好的声誉,还阻止了竞争对手的模仿和抄袭行为。
通过保护创新成果,XXX公司提高了自身的竞争力和市场份额。
案例二:XXX企业的专利授权与技术转让XXX企业是一家专注于新能源汽车生产的制造企业。
为了实现技术突破和市场扩展,该企业与国内外研发机构合作,共同进行科研和技术探索。
通过与研发机构的合作,XXX企业获得了多项与新能源汽车相关的核心专利。
随后,他们将这些专利进行授权,并与其他企业进行技术转让。
通过合理的技术转让,XXX企业不仅实现了技术与市场的双赢,还从中获得了可观的经济收益。
这个案例表明,专利保护有助于促进技术创新的交流与合作,加快新兴产业的发展。
案例三:XXX制造公司的专利侵权维权案XXX制造公司是一家从事电子产品制造的企业,在市场上占有一定份额。
然而,由于市场竞争激烈,该公司频繁遭遇专利侵权问题。
例如,某竞争对手在未经许可的情况下,制造和销售了与XXX公司拥有专利相同的产品。
为了保护自身的权益,XXX公司采取了法律手段,提起专利侵权诉讼。
最终,法院判决对方立即停止侵权行为,并支付巨额赔偿。
这个案例反映了专利保护在制造业中的重要性,专利的侵权维权对企业的长远发展和市场秩序维护都具有重要意义。
综上所述,专利保护在制造业中的应用案例分析表明,专利对企业的意义重大。

机械领域专利侵权案例分析背景在现代社会,机械领域的技术和知识产权保护变得越来越重要。
专利是一种重要的知识产权形式,它给予发明者在一定时间内对其发明进行独占权利的能力。
然而,在机械领域,专利侵权案件也时有发生。
本文将通过分析几个机械领域的专利侵权案例,来探讨其中的原因、影响以及如何防止这些案件发生。
案例一:汽车发动机专利侵权案案例描述:某汽车制造公司开发了一种创新的汽车发动机技术,并申请了相关的专利。
然而,不久后,另一家汽车制造公司推出了一款类似的发动机,被认为侵犯了原公司的专利权。
分析:这种情况下,专利侵权案可能是由于另一家公司没有在设计和开发中充分考虑到原公司的专利权。
可能是他们没有进行合适的专利搜索和风险评估,也没有与专利持有人进行合作或协商。
此外,可能另一家公司认为他们的技术与原公司的专利不同,因此没有意识到侵权行为。
影响:对于原公司来说,专利侵权可能导致他们的技术和研发投资没有得到应有的回报。
同时,这也会对市场竞争和创新产生负面影响,因为其他公司可能不再愿意投资研发创新的技术,以免触犯他人的专利。
防范措施:为了防止专利侵权案发生,汽车制造公司应该在设计和开发过程中充分尊重他人的专利权。
这意味着他们应该进行充分的专利搜索和风险评估,确保他们的技术与他人的专利没有冲突。
此外,与专利持有人进行合作或协商也是减少专利侵权风险的重要步骤。
案例二:3D打印技术专利侵权案案例描述:一家公司开发了一种创新的3D打印技术,并申请了相关的专利。
然而,不久后,一家竞争对手公司推出了一款类似的3D打印设备,并被告知侵犯了原公司的专利权。
分析:在这种情况下,专利侵权案件可能是由于竞争对手公司没有充分考虑到原公司的专利权。
他们可能没有进行充分的专利搜索和风险评估,也没有与专利持有人进行合作或协商。
此外,可能竞争对手公司认为他们的技术与原公司的专利不同,因此没有意识到侵权行为。
影响:对于原公司来说,专利侵权可能导致他们的3D打印技术无法获得合理的回报,并且会受到竞争对手的不公平竞争。

机械类专利范文技术领域本发明涉及一种机械装置,特别是一种用于XXXX的装置。
背景技术在过去的几十年里,随着科技的发展,人们对机械装置的需求不断增加。
例如,在制造业中,各种不同的机械装置被广泛应用于生产过程中。
然而,随着对效率和自动化程度要求的提高,现有的机械装置往往难以满足市场需求。
因此,目前市场上迫切需要一种新型的机械装置,以提供更高的效率和更好的自动化程度。
发明内容本发明提供了一种新型的机械装置,该装置可以实现XXXX。
此装置由多个部分组成,包括XXXX,XXXX和XXXX等部分。
这些部分协同工作以实现装置的运行。
该装置具有以下特点:1.XXXX特点:装置具有XXXX的特点,可以实现高效的XXXX。
2.XXXX特点:装置可以XXXX,从而可以适应不同的使用场景。
3.XXXX特点:装置采用了XXXX技术,可以实现自动化操作,减少人工干预。
4.XXXX特点:装置具有XXXX的结构,可以实现XXXX功能。
优点和创新之处相比现有技术,本发明具有以下优点和创新之处:1.提高效率:本发明引入了新的XXXX技术,可以大大提高机械装置的工作效率。
2.自动化程度高:本发明采用了XXXX技术,可以实现对机械装置的自动化操作,减少人工干预。
3.适应性好:本发明设计了可调整的XXXX功能,可以根据不同的使用场景进行调整,提高了装置的适应性。
4.结构稳定:本发明的装置采用了XXXX的结构,提高了装置的稳定性和可靠性。
详细描述下面将对本发明的装置进行详细描述。
XXXX部分XXXX部分是本发明装置的核心组成部分。
它由XXXX,XXXX和XXXX等组件组成。
在工作时,XXXX起到XXXX的作用,通过XXXX和XXXX的配合,实现了XXXX的功能。
XXX部分的设计和制造需要根据具体应用场景来确定。
XXXX部分XXXX部分是本发明装置的另一个重要组成部分。
它由XXXX,XXXX和XXXX 等组件组成。
在工作时,XXXX起到XXXX的作用,通过XXXX和XXXX的配合,实现了XXXX的功能。

专利名称:机械化假阴茎
专利类型:发明专利
发明人:加尔文·斯宾塞·李
申请号:CN200810134310.7申请日:20080722
公开号:CN101380271A
公开日:
20090311
专利内容由知识产权出版社提供
摘要:一种机械化假阴茎,其包括多个由马达驱动的纵向间隔开的同轴驱动凸轮,以及在弹性阴茎状套筒内运行从而在局部周期性地使该套筒的周长扩张的相应组的从动凸轮。
在靠近该套筒的最远端、以及在为刺激阴蒂而形成的侧向延伸的臂部中设置有可选的振动元件。
电池供电的控制手柄提供多种运行模式和速度。
申请人:加尔文·斯宾塞·李
地址:美国加利福尼亚州
国籍:US
代理机构:北京三友知识产权代理有限公司
代理人:党晓林
更多信息请下载全文后查看。
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710424585.3(22)申请日 2016.03.07(62)分案原申请数据201610126285.2 2016.03.07(71)申请人 温州市科泓机器人科技有限公司地址 325000 浙江省温州市温州高新技术产业开发区创业服务中心科技企业孵化器C幢522、524室(72)发明人 戴毅 (51)Int.Cl.B25J 15/10(2006.01)B25J 9/12(2006.01)(54)发明名称机器人灵巧手(57)摘要本发明是分案申请。
原案的申请号是:201610126285.2。
本发明涉及一种手爪,特别涉及一种机器人灵巧手。
机器人灵巧手,包括手指和手腕;所述手腕包括:骨架、直流电机、电位器、绞盘,所述直流电机固连于所述骨架的电机安装面上,所述电位器穿过电机输出轴固连于所述骨架的电位器安装面上,所述绞盘固连于电机输出轴的末端;所述手指数量为3个,所述手指通过旋转体的凸起块内嵌于所述骨架的卡槽或多位卡槽。
本发明机器人灵巧手装配于工业机器人的末端用于协助机械装配或者机械制造过程,用于完成工件的自动化上下料,手指可以柔性适应产品的几何外形、根据工件的几何形状实现自动调整,从而实现稳定抓取。
权利要求书1页 说明书5页 附图5页CN 107175680 A 2017.09.19C N 107175680A1.一种机器人灵巧手,其特征在于组成如下:包括手指和手腕;所述手腕包括:骨架、直流电机、电位器、绞盘,所述直流电机固连于所述骨架的电机安装面上,所述电位器穿过电机输出轴固连于所述骨架的电位器安装面上,所述绞盘固连于电机输出轴的末端;所述手指数量为3个,所述手指通过旋转体的凸起块内嵌于所述骨架的卡槽或多位卡槽;所述多位卡槽的数量为二,所述卡槽的数量为一,所述卡槽或多位卡槽的总数为三、且其中心点构成等边三角形的布局;所述多位卡槽包括:中心对称位置、30°位置、60°位置,所述30°位置和60°位置对称地布置于所述中心对称位置两侧;所述手指主要包括:上弹簧、下弹簧、中弹簧、JC2型连杆、K型连杆、L型连杆、A1型连杆、旋转体、B1型连杆、C1A2型连杆、B2型连杆、钢丝绳;所述JC2型连杆的末端分别活动连接于所述K型连杆和B2型连杆,所述B2型连杆活动连接于所述C1A2型连杆,所述上弹簧两端分别固连于弹簧卡扣,所述K型连杆和C1A2型连杆均活动连接于所述L型连杆,所述中弹簧两端分别固连于弹簧卡扣,所述L型连杆的另一端活动连接于所述A1型连杆的中端,所述B1型连杆两端分别活动连接于所述C1A2型连杆的中端和所述A1型连杆,所述旋转体活动连接于所述A1型连杆的中端,所述下弹簧两端分别固连于弹簧卡扣;所述钢丝绳由引入口插入、引出口引出,并由环氧树脂胶粘结固定于钢丝牵引槽,所述钢丝绳的引出端固连于钢丝绳卡口,轴孔固连于电机输出轴;所述直流电机为有刷直流电机。
(10)申请公布号(43)申请公布日 (21)申请号 201511016793.7(22)申请日 2015.12.29G01N 1/02(2006.01)(71)申请人中核四○四有限公司地址732850 甘肃省兰州市508信箱1分箱(72)发明人任正茂 唐辉 姜小亮 轩雷杨泽健 胡伦宝 万新平 胡云科何坤全 朱庆翔(74)专利代理机构核工业专利中心 11007代理人吕岩甲(54)发明名称一种远距离拆装的剑式机械手(57)摘要本发明涉及一种远距离拆装的剑式机械手,用于动力堆乏燃料后处理中间试验厂取样柜及钚尾端出料工作箱取样操作。
夹钳内部通过铆钉与螺母杆连接,夹钳外部使用沉头螺钉与套管Ⅰ连接,聚四氟乙烯环覆盖在沉头螺钉外部;导杆一端为螺纹杆与螺母杆连接,另一端通过销钉与芯轴连接;套管Ⅰ与套管Ⅱ通过螺母旋转压紧,通过十字槽盘头螺钉连接;压缩弹簧设置在芯轴的尾部,通过弹簧座将其固定,弹簧座通过螺纹与套管Ⅱ连接;锁紧螺钉设置在套管Ⅱ上;扳机与连杆通过铆钉连接,连杆与摇杆通过铆钉连接,摇杆一端固定在手柄下端,另一端深入芯轴尾部的方形槽内。
本发明解决剑式机械手扳机脱落、操作笨重费力、夹钳故障及弹簧失效更换困难等问题。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书1页 说明书2页 附图1页CN 106932220 A 2017.07.07C N 106932220A1.一种远距离拆装的剑式机械手,其特征在于:夹钳(1)内部通过铆钉与螺母杆(2)连接,夹钳(1)外部使用沉头螺钉(4)与套管Ⅰ(6)连接,聚四氟乙烯环(3)覆盖在沉头螺钉(4)外部;导杆(5)一端为螺纹杆与螺母杆(2)连接,另一端通过销钉与芯轴(7)连接;套管Ⅰ(6)与套管Ⅱ(9)通过螺母(8)旋转压紧,通过十字槽盘头螺钉(12)连接;压缩弹簧(10)设置在芯轴(7)的尾部,通过弹簧座(11)将其固定,弹簧座(11)通过螺纹与套管Ⅱ(9)连接;锁紧螺钉(13)设置在套管Ⅱ(9)上;扳机(14)与连杆(16)通过铆钉连接,连杆(16)与摇杆(15)通过铆钉连接,摇杆(15)一端固定在手柄下端,另一端深入芯轴(7)尾部的方形槽内。
专利申请案例范文公司发明了一种新的机械设备,希望能够保护这项发明并获得市场竞争的优势,因此决定申请专利。
以下是该公司专利申请的案例描述:一、背景介绍该公司是一家专注于机械设备制造的企业,一直致力于技术创新和产品改进。
在产品研发阶段,公司的研发团队发现了一种能够提高设备生产效率的新技术,通过该技术可大幅度减少人工操作,提高产品质量和减少产品损耗。
因此,公司决定将这项技术应用于机械设备上,并申请专利保护。
二、发明内容及技术特点这项发明主要是一种机械设备的改进,旨在提高生产效率和降低劳动成本。
其核心技术在于一种特殊的运输系统和自动化控制系统。
此运输系统能够自动识别和分拣不同类型的产品,并将其精确地投送到相应的工作区域。
自动化控制系统可以根据产品种类、数量和速度的变化,自动调整整个生产线的工作模式。
三、创新点在现有的机械设备中,产品的分拣和投送往往需要人工操作,容易出现误操作和工作效率不高的问题。
而该发明正是以此为出发点,提出了一种智能化运输系统和自动化控制系统。
该创新使得整个生产线不再依赖人工操作,实现了快速、精确和高效的产品分拣和投送。
四、实施途径该发明的实施包括以下几个关键步骤:1.安装智能传感器和摄像机进行产品的识别和定位。
2.设计合适的传送带和投送机械臂,将识别后的产品自动投送到相应的工作区域。
3.引入自动化控制系统,根据产品种类、数量和速度的变化,自动调整整个生产线的工作模式。
4.设置监控系统,实时监控生产线的运行状态,并能够迅速发现和解决可能出现的故障。
五、预期效果及市场竞争优势该发明的引入,将大大减少人工操作,提高产品分拣和投送的准确性和效率。
预期的效果包括:1.提高生产线的工作效率,大大缩短生产周期。
2.降低劳动成本,减少工人的雇佣和培训成本。
3.减少产品损耗和报废,提高产品质量。
与当前市场上的机械设备相比,该发明具有明显的竞争优势:1.降低劳动成本:自动化操作减少了对工人的依赖,从而减少了相关的劳动力成本。