电动汽车电池管理系统模块结构和SOC发展
- 格式:pdf
- 大小:1.84 MB
- 文档页数:13


《纯电动汽车电池管理系统的研究》篇一一、引言随着全球对环境保护和可持续发展的日益重视,纯电动汽车(BEV)已成为汽车工业的重要发展方向。
电池管理系统(BMS)作为纯电动汽车的核心组成部分,其性能的优劣直接关系到电动汽车的续航里程、安全性能以及使用寿命。
因此,对纯电动汽车电池管理系统的研究具有重要的理论和实践意义。
二、纯电动汽车电池管理系统概述纯电动汽车电池管理系统是一个复杂的电子系统,主要用于监控和控制电动汽车的电池组。
它负责实时监控电池的状态,包括电池的电压、电流、温度等关键参数,以确保电池安全、有效地运行。
同时,BMS还负责管理电池的充电和放电过程,优化电池的使用效率,延长电池的使用寿命。
三、纯电动汽车电池管理系统的研究现状目前,国内外学者对纯电动汽车电池管理系统进行了广泛的研究。
研究重点主要集中在以下几个方面:一是电池状态的实时监测和估计,二是电池管理策略的研究和优化,三是电池系统的安全保护。
通过这些研究,我们已经在提高电池的使用效率、延长电池寿命以及保障电池安全等方面取得了显著的成果。
四、纯电动汽车电池管理系统的关键技术(一)电池状态的实时监测和估计电池状态的实时监测和估计是电池管理系统的核心功能之一。
通过使用先进的传感器技术和算法,我们可以实时获取电池的电压、电流、温度等关键参数,并对这些参数进行估计和分析,以获取电池的荷电状态(SOC)和健康状态(SOH)。
这有助于我们更好地管理和使用电池。
(二)电池管理策略的研究和优化电池管理策略是影响电池性能和使用寿命的重要因素。
研究和优化电池管理策略,可以提高电池的使用效率,延长电池的寿命。
这包括充电策略、放电策略、均衡策略等。
例如,我们可以根据驾驶者的驾驶习惯和路况信息,制定出更加智能化的充电和放电策略。
(三)电池系统的安全保护电池系统的安全保护是电池管理系统的重要组成部分。
在电动汽车使用过程中,可能会发生过充、过放、短路等危险情况。
因此,我们需要设计出有效的安全保护措施,如过流保护、过压保护、温度保护等,以保障电池的安全运行。

简述纯电动汽车电池管理系统的功能-回复【简述纯电动汽车电池管理系统的功能】纯电动汽车(Electric Vehicle,简称EV)的电池管理系统(Battery Management System,简称BMS),是电动车核心部件之一,它的主要职责是对车载动力电池进行实时监控、智能管理和有效保护,确保电池组在高效、安全的状态下运行,延长电池使用寿命,并提升整个电动汽车的动力性能和续航能力。
以下是纯电动汽车电池管理系统的主要功能,将逐步展开详细解读。
1. 电池状态监测:电池管理系统的核心功能是对电池包内的每一块电池单元进行实时状态监测,包括电压、电流、温度等关键参数的采集与分析。
通过对单体电池的电压均衡性检测,可以及时发现并预警电池单元间的不一致性问题,防止因个别电池过充或过放导致的整体性能下降。
2. 荷电状态(SOC)估算:SOC是指电池剩余电量占其总容量的比例,精确估算SOC是电池管理系统的关键任务之一。
通过复杂的算法模型,结合电池实际工作情况(如充放电电流、电压变化等),BMS能准确预测电池的剩余能量,为驾驶员提供直观的续航里程信息,同时避免电池过度充电或深度放电造成损坏。
3. 健康状态(SOH)评估:电池管理系统还会对电池的健康状态(State of Health)进行动态评估,即衡量电池当前的实际容量与其初始设计容量之间的比率。
这有助于预测电池寿命,及时提醒用户进行维护保养或更换,保证车辆的正常行驶。
4. 热管理:电池在充放电过程中会产生大量热量,过高或过低的温度都会影响电池性能和寿命。
电池管理系统会根据各电池单元的温度数据,调控冷却或加热系统,使电池组保持在一个最佳的工作温度区间内,以提高电池性能和安全性。
5. 故障诊断与保护:当电池出现异常状况时,如短路、过温、过充、过放等情况,电池管理系统会立即启动保护机制,切断充放电回路或降低充放电电流,避免电池受到损害,同时向车辆控制系统发送警告信号,以便采取进一步的应对措施。

电动汽车电池管理系统电池状态估算及均衡技术作者:百合提努尔阿地里江·阿不力米提来源:《时代汽车》2024年第06期摘要:文章根據纯电动汽车和混合动力汽车的工作情况,归纳提出了电池管理系统(BMS)的核心功能和拓扑结构,对电池状态估算、电池监测系统和电池均衡系统等做了新的解析,简要的解释了电池常见故障原因以及预防措施等。
关键词:电池管理系统电池状态均衡1 电动汽车电池管理系统电池管理系统(Battery Management System,BMS)是电动汽车动力电池系统的重要组成部分,也是关键核心控制元件。
它一方面检测收集并初步计算电池实时状态参数,并根据检测值与允许值的比较关系来控制供电回路的通断;另一方面,将采集的关键数据上报给整车控制器,并接收控制器的指令,与车上的其他系统协同工作。
不同类型动力电池包的电芯(单体电池)对电池管理系统的要求是不尽相同的。
在任何一种电池管理系统(BMS)无论是简单还是复杂,均都有基本功能和实现这些功能的具体元器件。
如果需求越多,需要向系统中添加的元器件就越多。
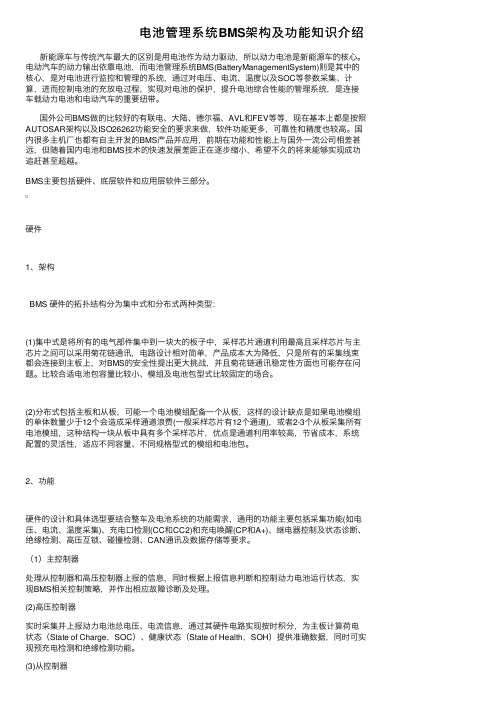
如图1所示,电池管理系统(BMS)的核心功能。
2 电动汽车电池管理系统(BMS)拓扑结构电池管理系统的部件则是以几种不同的方式布置结构。
这些布置结构称为拓扑结构。
电池管理系统的拓扑结构主要分为集中式、分布式和模块化等类型,如图2所示。
在集中式BMS拓扑结构中有一个带有控制单元的BMS印刷电路板,其通过多个通信电路管理电池包中的所有电芯。
这种类型的结构体积大、不灵活,但成本低。
在分布式BMS拓扑结构中,每一个电芯都有BMS印刷电路板,控制单元通过单个通道连接到整个电池。
常用的环形连接(菊花链式连接)是分布式拓扑结构的一种类型,并用于容错需求较小的系统。
分布式BMS易于配置,但电子部件多、成本高。
在模块化BMS拓扑结构是集中式和分布式两种拓扑的组合。
这种布置也称为分散、星形或主从控拓扑。
有相互连接的几个控制单元(从控板),每个控制单元监测电池中的一组电芯。

电池管理系统发展综述一、国内外研究现状电动汽车电池管理系统的研究始于20世纪七十年代末,美国人率先开始了电动汽车电池系统的热管理研究,电池的热管理系统就是现在电池管理系统的前身,此后其逐步发展成为现在功能全面的电池管理系统。
电池管理系统经历了从航天到军用再到民用的一个发展过程。
1984年,美国Rahnamai,H和ljichi,K等人研制了首套自动化电池管理系统实验模型,能够对航天器使用的镍氧电池的充放电进行监控。
在1985年NASA的空间飞行微型电池研讨会上,Moodyhe和Malcolm H公布了他们的高可靠电池管理系统,该系统对各个电池独立管理以避免个别电池的过充和过放。
而后美国又将电池管理系统应用于军用车辆里面。
到了90年代,随着动力电池和电动汽车的发展,电动汽车电池管理系统才真正发展成为电动汽车的必要配置。
此外,韩国、德国、日本、法国对电动汽车电池管理系统的研究也起步较早。
目前国外典型的BMS主要有EV1 BMS、SmartGuaxd系统、BatOpt系统、BADICOaCH系统、BA TTNIAN BMS等。
EV1 BMS的功能包括:单体电池电压监测、分流采集电流、过放电报警、断电保护装置、电量及里程预算等。
SmartGuard 系统采用了分布式方式釆集动力电池的温度和电压,除BMS的—般功能外,它还具有记录电池历史数据,显示最差单体电池信息等功能。
BatOpt系统也是一个分布式系统,包括中央控制单元和监控子模块,监控子模块将采集的各个电池的状态信息通过two wire总线上传至中央控制单元,中央控制单元再利用这些数据对电池进行优化控制。
BADICOaCH系统的电池电压采集电路采用了一非线性电路,此外BADICOaCH系统会存储充放电周期数据,以判断电池的工作状态,快速检査出电池的错误使用情况。
BA TTNIAN BMS的特点是解决了不同型号动力电池管理系统的通用性问题,它通过硬件跳线和软件上修改参数的方法,实现不同信号电池组的管理。
电池管理系统BMS架构及功能知识介绍新能源车与传统汽车最⼤的区别是⽤电池作为动⼒驱动,所以动⼒电池是新能源车的核⼼。
电动汽车的动⼒输出依靠电池,⽽电池管理系统BMS(BatteryManagementSystem)则是其中的核⼼,是对电池进⾏监控和管理的系统,通过对电压、电流、温度以及SOC等参数采集、计算,进⽽控制电池的充放电过程,实现对电池的保护,提升电池综合性能的管理系统,是连接车载动⼒电池和电动汽车的重要纽带。
国外公司BMS做的⽐较好的有联电、⼤陆、德尔福、AVL和FEV等等,现在基本上都是按照AUTOSAR架构以及ISO26262功能安全的要求来做,软件功能更多,可靠性和精度也较⾼。
国内很多主机⼚也都有⾃主开发的BMS产品并应⽤,前期在功能和性能上与国外⼀流公司相差甚远,但随着国内电池和BMS技术的快速发展差距正在逐步缩⼩,希望不久的将来能够实现成功追赶甚⾄超越。
BMS主要包括硬件、底层软件和应⽤层软件三部分。
硬件1、架构BMS 硬件的拓扑结构分为集中式和分布式两种类型:(1)集中式是将所有的电⽓部件集中到⼀块⼤的板⼦中,采样芯⽚通道利⽤最⾼且采样芯⽚与主芯⽚之间可以采⽤菊花链通讯,电路设计相对简单,产品成本⼤为降低,只是所有的采集线束都会连接到主板上,对BMS的安全性提出更⼤挑战,并且菊花链通讯稳定性⽅⾯也可能存在问题。
⽐较合适电池包容量⽐较⼩、模组及电池包型式⽐较固定的场合。
(2)分布式包括主板和从板,可能⼀个电池模组配备⼀个从板,这样的设计缺点是如果电池模组的单体数量少于12个会造成采样通道浪费(⼀般采样芯⽚有12个通道),或者2-3个从板采集所有电池模组,这种结构⼀块从板中具有多个采样芯⽚,优点是通道利⽤率较⾼,节省成本,系统配置的灵活性,适应不同容量、不同规格型式的模组和电池包。
2、功能硬件的设计和具体选型要结合整车及电池系统的功能需求,通⽤的功能主要包括采集功能(如电压、电流、温度采集)、充电⼝检测(CC和CC2)和充电唤醒(CP和A+)、继电器控制及状态诊断、绝缘检测、⾼压互锁、碰撞检测、CAN通讯及数据存储等要求。
soc估算方法研究及其在新能源汽车电池管理系统中应用【引言】随着新能源汽车市场的快速增长,电池管理系统(BMS)在保障电动汽车安全、可靠和高效运行方面发挥着重要作用。
电池管理系统中的一个关键功能是State of Charge(SOC)估算,它反映了电池剩余能量的状态。
本文将介绍SOC估算方法及其在新能源汽车电池管理系统中的应用。
【SOC估算方法概述】SOC估算方法包括以下几种:【a.开路电压法】开路电压法是一种简单且常用的SOC估算方法。
通过对电池的开路电压进行测量和分析,可以估算出电池的SOC。
然而,该方法受电池内阻、温度等因素影响较大,精度较低。
【b.放电曲线法】放电曲线法通过绘制电池放电曲线,分析电池电压与SOC的关系。
该方法适用于具有固定放电特性的电池,但在实际应用中,电池性能可能会受到温度、负载等因素的影响。
【c.电化学阻抗谱法】电化学阻抗谱法(EIS)是一种非破坏性方法,可以通过测量电池的阻抗变化来估算SOC。
该方法具有较高的精度,但测量过程较复杂,对实验设备要求较高。
【d.神经网络法】神经网络法是一种基于大数据分析的SOC估算方法。
通过训练神经网络模型,建立电池电压、电流与SOC之间的关系。
该方法具有较高的精度,但对数据量和质量要求较高。
【e.其他方法】其他SOC估算方法还包括:卡尔曼滤波法、模糊逻辑法、支持向量机法等。
这些方法各有优缺点,适用于不同类型的电池和应用场景。
【新能源汽车电池管理系统简介】新能源汽车电池管理系统(BMS)是对电池组进行实时监控和管理的一种系统。
主要包括电池状态监测、电池保护、电池均衡、SOC估算等功能。
BMS 的目标是确保电池在安全、可靠和高效的条件下运行。
【SOC估算方法在新能源汽车电池管理系统中的应用】SOC估算在BMS中具有重要作用:【a.提高电池管理水平】准确的SOC估算有助于电池管理人员更好地了解电池剩余能量状态,从而制定合理的充放电策略。
【b.优化电池性能与安全性】通过实时监测和预测电池SOC,可以有效避免电池过充、过放等不当使用情况,提高电池性能与安全性。
动力电池系统结构动力电池系统是现代电动汽车和混合动力汽车的核心组成部分,其结构复杂且精密,以确保电池的安全、高效和长寿命运行。
本文将详细介绍动力电池系统的基本结构。
一、电池模组电池模组是动力电池系统的基本单元,由多个单体电池组成。
这些单体电池通常由锂电池、镍氢电池或铅酸电池等组成,它们被整齐地排列在一起,并通过串联和并联的方式连接在一起,以提供所需的电压和电流。
电池模组的主要功能是储存和释放电能,为车辆的启动、行驶和加速提供动力。
二、电池管理系统电池管理系统(BMS)是动力电池系统的核心组成部分,负责监控和管理电池的运行状态。
BMS可以确保电池的安全运行,防止过充电、过放电和电池温度过高。
BMS还可以对电池的电量进行估算,以帮助驾驶员了解电池的剩余电量,并为其充电提供指导。
三、冷却系统由于电池在充电和放电过程中会产生大量的热量,因此需要冷却系统来保持电池的温度在安全范围内。
冷却系统通常包括散热器、风扇、水泵等部件,以确保电池在最佳的温度下运行。
四、外壳和结构件动力电池系统的外壳和结构件是整个系统的支撑和保护层。
它们需要承受来自车辆的冲击和振动,同时还需要防止电池在意外情况下的损坏。
因此,外壳和结构件需要具有高强度和耐久性。
五、连接线路和插件连接线路和插件是将各个电池模组连接在一起的关键部件。
它们必须能够承受高电流和高温,同时还需要具备防水、防火等特性,以确保电池系统的安全运行。
动力电池系统结构复杂且精密,包括电池模组、电池管理系统、冷却系统、外壳和结构件以及连接线路和插件等组成部分。
这些部件协同工作,以确保电池的安全、高效和长寿命运行,为电动汽车和混合动力汽车的行驶提供动力。
动力电池系统是现代电动汽车和混合动力汽车的核心组成部分,其结构复杂且精密,以确保电池的安全、高效和长寿命运行。
下面,我们将深入探讨动力电池系统的结构。
电芯:这是动力电池系统的基本单元,通常由正极材料、负极材料、电解质和隔膜组成。
电动汽车电池管理系统SOC估计方法分析葛东东; 赵俊; 张庆; 何也能【期刊名称】《《南方农机》》【年(卷),期】2019(050)023【总页数】2页(P30,34)【关键词】电动汽车; 电池管理系统; 荷电状态【作者】葛东东; 赵俊; 张庆; 何也能【作者单位】浙江工业职业技术学院交通学院浙江绍兴312000【正文语种】中文【中图分类】U469.72当今世界能源危机和温室效应的双重压力节节攀升,电动汽车作为一种可以减少工业能源消耗的新工具,给汽车产业带来了新的生命[1]。
锂离子电池作为电动汽车内部的关键部件,必须稳定运行,以保证整个电力系统的安全和可靠性。
电动汽车电池管理系统(BMS)是对车用动力电池组进行安全监控及有效管理,提高电池使用效率的装置。
电池荷电状态(State of Charge,SOC)估计作为电池管理系统最为重要的功能之一,是其他所有电池状态估计的前提。
SOC作为电池内部参数,通常难以直接测量获取,只能基于其余可测参数(电压、电流、温度等)间的关系进行估计。
电池SOC精确估计不仅是BMS的一项重要功能,也是保证电池安全、高效、长寿、延长车辆寿命的一项关键任务。
本文综述了锂离子电池SOC估计模型,分析了目前主流的电池SOC估计方法,并对未来SOC研究方向进行了探讨。
1 SOC估计模型电池在工作过程中主要涉及到电荷传递、热量传递、电化学反应等,表现出强烈的非线性动态变化。
电池SOC估计时主要使用的模型有等效电路模型、机理模型、黑箱模型等。
1)等效电路模型一般采用电阻、电容、电压源等电路元器件来反应电池的电化学特性。
模型中的电压源来表示电池的热力学平衡电势,用电阻电容来表示电池的动力学特性。
常用的动力电池等效电路模型有Rint模型、Thevenin模型、二阶RC 等效电路模型等。
Rint模型由理想电压源和理想电阻串联而成。
理想电压源用来描述动力电池的开路电压,理想电阻描述电池欧姆电阻。
2023年电池管理系统(BMS)行业市场发展现状电池管理系统(BMS)是指集电池的监控、控制、保护和通信于一身的电子社会化系统,作为电池组的重要组成部分,它主要对电池组的温度、电压、电流等参数进行监控和管理,确保电池组的安全性能。
BMS作为单个电池的智能管理系统,在电动汽车、能源储存、智能配电等领域中应用越来越广泛。
BMS的发展可以主要分为以下几个阶段:第一阶段:低成本简单型(2000年前)在电动汽车行业起步时,BMS为了控制成本,多采用低成本、简单的控制电路,往往只有一个基本的电压检测和单级过压保护,主要用于保护电池组的安全。
第二阶段:功能完善型(2000-2010年)随着电动汽车等新兴产业的迅猛发展,对BMS的要求越来越高,BMS开始向功能完善型转变,加入了SOC(State of Charge)、SOH(State of Health)、SOP (State of Power)等多种状态监控功能,同时逐渐出现了可编程功能的BMS,能够根据不同应用场景、不同电池类型进行相应的优化设计。
第三阶段:智能协同型(2010年至今)在现代高端电动汽车和能源储存领域,BMS的升级换代是最为迅速的。
现代BMS往往采用高速微处理器作为控制核心,集成了多种传感器、通信接口和电源管理功能。
它在监测电池组电压、温度、电流、容量等参数的同时,还具备极高的安全性能和智能化方案,能够对电池组进行追踪记录和数据分析,为整个电动汽车和能源储存智能管理系统的建立和完善提供了坚实的基础。
从全球范围内来看,BMS行业目前呈现出以下几个发展趋势:一是产业化发展加速。
随着BMS技术的成熟和越来越多的行业应用,BMS产业化发展已经成为了不可逆转的趋势,整个BMS市场的发展规模和市场份额都在不断地扩大。
二是互联网+BMS走向全球。
近年来,随着科技的不断推进,BMS市场趋势逐渐向互联网与智能化方向发展,各家厂商都在致力于实时远程监控和控制技术的研发,以实现对电池组的远程监测和数据共享管理。
Battery-Management System(BMS)and SOC Development for Electrical Vehicles K.W.E.Cheng,Senior Member,IEEE,B.P.Divakar,Hongjie Wu,Kai Ding,and Ho Fai HoAbstract—Battery monitoring is vital for most electric vehicles (EVs),because the safety,operation,and even the life of the passenger depends on the battery system.This attribute is exactly the major function of the battery-management system(BMS)—to check and control the status of battery within their specified safe operating conditions.In this paper,a typical BMS block diagram has been proposed using various functional blocks.The state of charge(SOC)estimation has been implemented using Coulomb counting and open-circuit voltage methods,thereby eliminating the limitation of the stand-alone Coulomb counting method.By modeling the battery with SOC as one of the state variables,SOC can be estimated,which is further corrected by the Kalmanfil-tering method.The battery parameters from experimental results are integrated in the model,and simulation results are validated by experiment.Index Terms—Battery-management system(BMS),electric vehicles(EVs),state of charge(SOC).N OMENCLATURELi-ion Lithium ion.LiFePO4Lithium-ion iron phosphate.BMS Battery-management system.EV Electric vehicle.HEV Hybrid electric vehicle.OCV Open-circuit voltage.CAN Control area network.ECU Electronic control unit.EMF Electromotive force.SOC State of charge.SOH State of health.Manuscript received July31,2009;revised December3,2009,March23, 2010,June9,2010,and August11,2010;accepted August31,2010.Date of publication October25,2010;date of current version January20,2011. This work was supported in part by the Niche Areas Funding Scheme of the Hong Kong Polytechnic University under Project1-BB86and by the Auto-motive Parts and Accessory Systems R&D Centre Limited,under Project ITP-032-07AP,established with funding from the Innovation and Technology Fund, Hong Kong.The review of this paper was coordinated by Mr.D.Diallo.K.W.E.Cheng and K.Ding are with the Power Electronics Research Centre,Department of Electrical Engineering,The Hong Kong Polytechnic University,Kowloon,Hong Kong(e-mail:eeecheng@.hk;eekding@ .hk).B.P.Divakar is with the Department of Electrical and Electronics Engineer-ing,Reva Institute of Technology and Management,Bangalore560064,India (e-mail:eebpdiva@).H.Wu is with the National Engineering Laboratory of Automotive Elec-tronics,Shanghai Jiao Tong University,Shanghai200240,China(e-mail: wuhongjie@).H.F.Ho is with the Department of Electrical Engineering,The Hong Kong Polytechnic University,Kowloon,Hong Kong(e-mail:eehfho@.hk). Color versions of one or more of thefigures in this paper are available online at .Digital Object Identifier10.1109/TVT.2010.2089647SOP State of polarization.E0Constant voltage.K Polarization constant.C Polarization coefficients.B Exponential capacity(Ah)−1.A Exponential voltage.i Current.α,β,andγPolarization coefficients.Q d Double-layer capacity(in ampere-hours).R n Internal resistance(in ohms).I k Current(in amperes),which is positive whencharged and negative when discharged[range:(−500∼+500),according to the manufacturer].Δt Sample period(in seconds).Q R Rated capacity(in ampere-hours).M Maximum polarization voltage(in volts).I.I NTRODUCTIONB ATTERIES are the most common electrical energy-storage devices in EVs.The performance of a battery when it is connected to a load or a source is based on the chem-ical reactions inside the battery.The chemicals degrade with time and usage that reflect the gradual reduction in the energy storage capacity of the battery.The battery depreciation process needs to be reduced by conditioning the battery in a suitable manner by controlling its charging and discharging profile, even under various load conditions.In general,the battery life time will be diminished when the battery is operated under a wide range of thermal conditions and frequent charge and deep discharge cycles,particularly at high-pulse current conditions. Batteries are safe,despite reports of explosion or failure,when used with a power-conditioning system that incorporates safety features and automatic shutdown[1]–[5].Conventional low-cost battery chargers employ few protective features intended for that battery,thus lackingflexibility and full-fledged pro-tection.Hence,BMS,which isflexible to protect batteries of different types and can provide all the safety features,has been the topic of recent development/research in EV[1],[6]–[10] and alternative energy systems[6],[7].One of the important parameters that are required to ensure safe charging and discharging is SOC.SOC is defined as the present capacity of the battery expressed in terms of its rated capacity[8],[11]–[14].SOC provides the current state of the battery and enables batteries to safely be charged and dis-charged at a level suitable for battery life enhancement.Thus, SOC helps in the management of batteries.However,measuring SOC is not direct,because it involves the measurement of0018-9545/$26.00©2010IEEEFig.1.Block diagram of BMS.battery voltage,current,temperature,and other information that pertains to the battery under consideration.Accurate estimation of SOC prevents battery damage or rapid aging by avoiding unsuitable overcharge and overdischarge. The conventional SOC estimation using the Coulomb count-ing method suffers from error accumulation glitch,leading to inaccurate estimation.In addition,thefinite battery efficiency and the chemical reaction that takes place during charge and discharge conditions cause temperature rise,which influences SOC estimation.Therefore,accurate algorithms are needed to model the battery for SOC estimation.In EVs,the number of batteries is connected in series-parallel combination to match the load requirement.Due to manufacturing procedures,not all batteries simultaneously attain full voltage during charging. This condition results in voltage imbalance among different bat-teries and,consequently,lower capacity from the entire battery string.Therefore,a cell with100%SOC may not necessarily indicate the actual SOC.Therefore,accurate calculation of SOC must be accompanied by a continuous monitoring of the actual capacity of the cell with a number of measurements of the cells to reflect the actual and practical capability of the cell tofit the different road conditions and driving patterns of EVs.BMS is a separate entity with hardware andfirmware and is connected to a battery charger rather than integrated within the charger.BMS consists of a number of sensing devices for monitoring battery parameters that will be used in the algorithm for SOC estimation.The significant block of any BMS is the battery model block,which requires detailed understanding of battery characteristics for accurate SOC estimation[15], [16].The model is generally derived from the charging and discharging curves of the battery.One advanced battery model [17]based on a state-space technique is implemented in this paper.The paper is organized as follows.The proposed BMS is discussed in Section II,The SOC estimation technique is presented in Section III.Experimental results on the chosen LiFeO4is carried out in Section IV,and the simulation re-sults are discussed in Section V,followed by conclusions in Section VI.II.B ATTERY-M ANAGEMENT S YSTEM R EPRESENTATION The block diagram of the proposed BMS is given in Fig.1, and the functional details of each of the blocks are described as follows.A.Measurement BlockThe measurement block(see Fig.1)captures individual cell voltages,battery current,and battery temperature at different points of the battery bank,as well as the ambient temperature, and converts them into digital values.All of these data areFig.2.Cell voltagemeasurement.Fig.3.SOC and SOH estimation block.then used to estimate the battery status in later stages.The cell voltage measurement block that is shown in Fig.2includes a photo relay matrix.In every sample period,only one of the cell voltages is connected to the analog-to-digital(A–D)interface of the central processing unit.The advantage of measuring individual cell voltages justifies the added cost of hardware because it enables cell balancing and overcharge protection at the cell level.B.Battery Algorithm BlockThe battery algorithm block(see Fig.3)is a conditional status block of the battery.Its principal function is to estimate SOC and SOH using the measured battery variables such as battery voltage,current,and temperature.SOC is defined as the capacity of a battery,expressed as a percentage of its rated capacity.It looks like the“fuel gauge”of vehicle,but it indicates the energy left in the battery.The estimation of SOC is very useful to know the remaining capacity of a battery when the battery is discharged.This condition will permit the estimation of travelling distance of an EV from the available capacity of the battery.SOC is influenced by the temperature, operating cycles,and discharge rate;therefore,BMS should incorporate a model of the battery that takes into account the effects of these factors to deduce SOC.Typical inputs to the model include the voltage,current,and temperature,and they are obtained by the respective sensors.The sensors provide the analog inputs,which are digitized using A–D converters. The inputs are constantly monitored at regular intervals by the microprocessor.The SOC indication is useful not only to estimate the running distance but,in addition,to keep the batteries at a specified SOC to deliver and accept charging without the risk of overdischarge or overcharge of the cells.In a typical EV,the cells are of-ten subjected to charge dumping due to regenerative braking, leading to the overcharging of the cells,particularly when the SOC of the battery is high.In such events,the BMSshould Fig.4.Demand management block.monitor the SOC and control the charge dumped into the battery during regenerative braking to prevent the cells from getting overcharged.SOC is one of the most important outputs of BMS.There are a few techniques that determine SOC based on cell voltages, currents,and temperature.The most primitive method is direct measurement,i.e.,measure either OCV or loaded cell voltage and then deduce the SOC from prestored discharge charac-teristics.This method does not work well on Li-ion batteries, because the middle section of the discharge curve of Li-ion batteries is veryflat.A small measurement error will cause a large variation in SOC.Direct measurement does not take temperature and aging effects into consideration.C.Capability Estimation BlockAfter SOC and SOH are determined,BMS has to deduce the maximum charge and discharge current at any instant in accordance with an algorithm.The output of this block is provided to the vehicle ECU so that the battery is not subjected to charge or discharge beyond the specified limits.The function of the capability estimation block(see Fig.4) is to send information to the ECU about the present safe level of charging and discharging current of the battery.This information is very vital for the safe operation of the battery and prevents accidental violations of battery specifications. The control laws for deriving the maximum discharge and charge current based on the inputs are shown in Figs.5and 6,which depict the relation between the permissible charge and discharge currents,expressed in terms of the maximum charge/discharge current for various values of different battery parameters.The charge/discharge factors in Figs.5and6are the permissible charge/discharge currents,expressed in terms of maximum charge and discharge currents,respectively.(TheFig.5.Effect of inputs on the maximum chargecurrent. Fig.6.Effect of inputs on the maximum discharge current.charging factor is the percentage of the maximum charging current.)According to the plots in Fig.5,the BMS will restrict the charging current according to a function that depends on the temperature,SOC,and cell voltage.For example,the charging current has to be decreased if the temperature is in the range of 30◦C–40◦C.Similarly,the maximum current with which the battery can be charged is a function of the SOC and cell voltage. Note that,according to battery specifications,it is not ad-visable to discharge the battery at the minimum specified tem-perature,i.e.,less than−20◦C.In practice,the C rate would be very low.The maximum discharge and charge rates are stated in the battery manufacturer’s datasheet.It is expressed in C—the nominal capacity of the battery.D.Cell Equalization BlockDue to the limitation of current manufacturing processes,all cells are not alike.The variation in cell capacity within the range of a few percent up to15%is common.Other variations such as internal resistance and charge/discharge characteristic are unavoidable.Cell balancing is vital to maximize the usable battery pack capacity and lifetime.This module compares the cell voltages andfinds the differ-ence between the highest voltage cell and the lowest voltage cell (see Fig.7).If the difference is larger than a preset threshold, then the charging is halted,and the highest voltage cell is discharged through the discharge resistor.The discharge ends once the difference diminishes.This approach is called dissipa-tive cell balancing.Another cell balancing technique is active balancing,which either charges each cell throughseparate Fig.7.Cell equalization.chargers or transfers the charge from the highest voltage cell to the lowest voltage cell.Active balancing is clearly superior in terms of performance and energy efficiency,but its cost is also prohibitive in the cost-sensitive automotive industry. Many complex battery equalization circuits in the literature [18]useflying capacitors,dc–dc converters with multiple sec-ondary windings,and a single dc converter that can charge the weakest cell in a battery pack.The cost of implementation depends on the equalization time,which,in turn,depends on the power rating of an auxiliary power supply.E.Thermal Management BlockThe boundary diagram of the thermal management block in BMS estimates the battery temperature and is shown in Fig.8. The temperature estimation is based on a very simple1-D temperature-estimation method[16].Thermal management refers to monitoring and controlling the battery temperature so that the battery is not harmed by very high or very low temperature.The outputs of this block control a fan and an electric heater,which attempt to keep the battery temperature within the optimal range.Fig.8.Thermal management block.The thermal management block reads ambient and battery temperatures,initiates cooling or heating operation,and sends an emergency signal to ECU in case of abnormal rise in temperature.III.S TATE OF C HARGE E STIMATIONThe model developed in this paper is based on the state-space method presented in[16],in which SOC is a state of the system,and OCV is predicted using polynomial equations.The predicted OCV is then used for calculating the terminal voltage of the battery,and the calculated terminal voltage is compared with the actual battery voltage.The error between the calculated and the real battery voltage is then used to calculate thefilter gain in the Kalmanfilter to update the state SOC.Thus,the model is used to estimate the SOC of a battery.The battery model simulates a battery control strategy for EV.In this model, the battery SOC is simulated.The parameters represented in the model were extracted from the experiment data of the chosen LiFePO4battery.SOH is defined in terms of the percentage of nominal capac-ity.Aging and charge–discharge cycles are two major factors that reduce the SOH of a battery.The SOH of an average Li-ion battery is reduced to80%after1000charge–discharge cycles. The commonly used method is given bySOH=nominal capacity−loss of capacitynominal capacity.(1)A.Battery ModelThe battery model[15]shown in Fig.9consists of a con-trolled voltage source in series with a resistor that represents the internal resistance of the cell.The controlled voltage source is implemented using the following expression:OCV=E0−KQ RQ R−it+Ae−bit.(2)The main advantage of this model is that all the parameters can be obtained from the cell’s discharge characteristicsto Fig.9.Generic battery model in[15].represent a particular battery type.The SOC for step changes in load can be derived usingSOC new=SOC old−ΔSOCSOC new=SOC old−i newΔtQ R.(3)The input to the SOC estimation block is the current,and the output is the SOC estimation.The simple generic model shown in Fig.9does not consider the effect of temperature and the rate of discharge current,and hence,the results are not accurate for practical implementation. It lacks the accuracy demanded in a practical application.The following section gives the development of a model based on state-space equations where SOC and SOP are considered as state variables.B.State-Space ModelThe state-space representation of a typical battery[17]is given in(4),shown at the bottom of the next page.The battery terminal voltage is defined inV bat(k)=OCV(S oc(k))+S op(k)+R n i k.(5)OCV is obtained by modeling the curve that depicts the relation between SOC and OCV as inOCVˆSoc(k+1)=b(1)ˆS5oc(k+1)+b(2)ˆS4oc(k+1)+b(3)ˆS3oc(k+1)+b(4)ˆS2oc(k+1)+b(5)ˆS1oc(k+1)+b(6).(6)Fig.10.Flowchart of SOC estimation using the Kalmanfiltering method. The following conditions hold.–M(in volts)depends on the double-layer capacity of the battery as inM=α+βln|i|+γΔS oc.(7)–SOP(in volts)indicates the battery polarization voltage, with a range of(−M∼+M)and an initial value of0.We haves(k)=⎧⎨⎩1,i(k)>ε−1,i(k)<−εs(k−1),|i(k)|≤ε.(8)εis a small positive quantity.In the battery model,(4)is the state equation,where S oc(k+1)is the SOC at discrete-time index(k+1),and S oc(k)is the SOC at discrete-time index(k).S op(k+1)the SOP at(k+1),S op(k)is the SOP at(k),i(k) is the current when charging or discharging,ηi is the charge or discharge Coulombic efficiency,Δt is the sample period,Q R is the battery-rated capacity,Q d is the double-layer capacity (in ampere-hours),M is the maximum polarization voltage(in volts),and S(k)is a sign,which is equal to+1when charging and equal to−1when discharging.In this equation,S op(k)is treated as afirst-order item.Equation(5)is the output equation,where V bat(k)is the battery terminal voltage,and OCV(S oc(k))is the EMF as a function of SOC.R n is the internal resistance(in ohms).Equation(6)represents the EMF as a function of SOC.We use afifth-order polynomial.In the polynomial,the coefficients of b(1),b(2),b(3),b(4),b(5),and b(6)are used.Equation(7)represents how we can calculate M,i.e.,the maximum polarization voltage.This equation is based on the Tafel formula[19].Considering the accumulated effect, the Tafel formula is modified by adding anΔS oc in this paper.ΔS oc is the increment/decrement of S oc during charging or discharging.ΔS oc is reset to0when the battery is converted from charge to discharge or from discharge to charge.C.Battery AlgorithmThe battery algorithm block is shown in Fig.3.The inputs to the block are the battery current,battery voltage,ambient temperature,battery temperature,and module voltage.All of these inputs are obtained by the respective sensors.The total capacity of the battery is the accumulated capacity the battery has charged and discharged since the battery has been used in the vehicle.SOC estimation based on Kalmanfiltering[20]for a Li-ion battery is used in the SOC estimation algorithm.The flowchart is shown in Fig.10.The SOC estimation method involves the following steps.1)Restore the battery initial SOC.2)Calculate the battery SOC and SOP according to the stateequation in the battery model as in(4).3)Calculate the battery voltage according to the outputequation(5)in the battery model.S oc(k+1) S op(k+1)=1001Soc(k)S op(k)exp−i(k)ΔtQ d+s k M1−exp−i(k)ΔtQ d+ηiΔtQ Ri(k)(4)Fig.11.Constant current charge at16◦C.Fig.12.Constant current charge at40◦C.4)Compare the real battery voltage and the model voltage,and calculate the battery voltage error as˜Vbat(k+1)=V bat(k+1)−ˆV bat(k+1).(9) 5)Calculate thefiltering gain asP(k+1|k)=Φ[k+1,k]P(k|k)ΦT[k+1,k]+Γ(k+1,k)Q kΓT(k+1,k)(10) P(k+1|k+1)=P(k+1|k)−P(k+1|k)H T(k+1)×H(k+1)P(k+1|k)H T(k+1)+R k+1−1×H T(k+1)P(k+1|k).(11)Fig.13.Constant current discharge at16◦C.Fig.14.Pulse discharge at16◦C.Here,P(k+1,k)means that,in the current interval k,predict P in the next interval k+1.Then,P(k+1,k)iscalculated with the state equation.The vertical line hereis a symbol.In some papers,a“,”may be instead used.P(k+1,k+1)means that,in the current intervalk+1,predict P in the next interval k+1.Then,P(k+1,k+1)is calculated with the output equation.Therefore,in the SOC algorithm,to be precise,Pmeans the estimated SOC error.The heart of the solution is a set of computationallyefficient recursive relationships that involve both an esti-mate of the state itself and the covariance matrix P(k)ofthe state estimate error.P(k)is the state error covariance matrix,assuming thatP(0|0)=0.3(the initial SOC error).Φ(k+1,k)is the coefficient matrix in this algorithm,withΦ(k+1,k)=1.Fig.15.Battery-ratedcapacity.Fig.16.Charging data of a40-Ah LiFePO4battery at16◦C.Assume that w and v are stochastic noise processes.In addition,w and v are mutually uncorrelated white Gaussian random processes,with zero mean and covari-ance matrix.Q is the covariance of w and is decided according to the current sample error.For example,the following conditions hold.–The current sample circuit error is0.5A.–The sample period is2s.–The battery-rated capacity is40Ah.–Q=(0.5∗2)/(40∗3600).–R is the covariance of v and is decided according to the voltage sample relative error.–H is the coefficient matrix in the output equation.–Γ(k+1,k)is the coefficient matrix of stochastic noise w.Fig.17.Discharging data of a40-Ah LiFePO4battery at16◦C.Fig.18.Battery OCV versus SOC.6)Calculate the SOC correction gain asK(k+1)=P(k+1|k)H T(k+1)×H(k+1)P(k+1|k)H T(k+1)+R k+1−1.(12) Following the output measurement equation,the state error covariance matrix P(k+1|k)and the coefficient matrix in the output equation are used to calculate the SOC correct gain.7)Correct the battery SOC as follows:ˆSoc(k+1|k+1)=ˆS oc(k+1|k)+K(k+1)˜V bat(k+1).(13)The correct gain would add to the SOC calculation.If the battery voltage error and the SOC correct gain is large, the SOC update tends to be large.In practice,the correct K(k+1)˜V bat(k+1)should not be more than(−1%to 1%)in one sample period;otherwise,the vehicle control strategy may be influenced.8)Output SOC and return to step2).Fig.19.Step load change experiment to obtain internalresistance.Fig.20.Step load change experiment to extract parameters.IV.E XPERIMENTSSeveral battery experiments have been performed at16◦C and40◦C to collect estimate battery parameters and to compare the results from the simulation.The experiments include the following parameters:–constant current charge;–constant current discharge;–pulse current charge;–pulse current discharge;–temperature characteristics experiments;–variable current experiments.In the constant current charge experiments,the current is4A (0.1C),8A(0.2C),and10A(0.25C),as shown in Figs.11 and12.The maximum voltage is3.6V.Experimental data are used to calculate the rated capacity of the battery.As shown in Fig.11,the voltage suddenly drops when the current is from0.25C to0,which indicates the termination of the charging procedure.It is normal for the voltage to drop during the charging process when the current is reduced or for the voltage to increase during discharge when the current is reduced.In Fig.11,the experiment at0.25C ended at about 3.3h when the relay has tripped due to a timer circuit.The timer function was included to minimize the danger dueto Fig.21.Battery voltage versus SOC at different charging rates.TABLE IP ARAMETERS U SED FOR THE SIMULATIONFig.23.Error between the computed voltage and the experiment voltage at different charging currents.minimum voltage is2.4V.The experimental data are used to calculate the rated capacity of the battery.The discharge plots are shown in Fig.13.The plots from pulse current discharging are shown in Fig.14.Fig.15shows the estimated capacity of the battery at two different temperatures,confirming the drop in the capacity at higher temperature.A.Estimating the Parameters for the BatteryUsing ExperimentsExperiments are done to extract the parameters of the battery, including constant current charging,constant current discharg-ing,pulse current charging,pulse current discharging,and variable current charging/discharging.Fig.16shows the plots of battery voltage versus SOC during charging at0.1C,0.2C,Fig.24.Error between the computed voltage and the experiment voltage at different discharging currents.and0.25C.Fig.17shows the plots of battery voltage versus SOC during discharge at0.25C,0.3C,and0.5C.Figs.16and17are obtained by calculating the SOC from the V–I curve obtained from the experimental results.The results can be used for comparison with the predicted battery voltage from the simulation.The simulation requires a few parameters of the battery model,which can be extracted as follows.The parameters for the battery model are listed as follows:1)the coefficients of the polynomial of OCV;2)battery internal resistance,R n(in ohms);3)battery-rated capacity(in ampere-hours);4)double-layer capacity,Q d(in ampere-hours);5)polarization coefficientsα,β,andγ.Some of the parameters can be extracted from the experimen-tal data,and the remaining parameters can be extracted from the86IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY,VOL.60,NO.1,JANUARY2011CHENG et al.:BATTERY-MANAGEMENT SYSTEM(BMS)AND SOC DEVELOPMENT FOR ELECTRICAL VEHICLES87 specification of the manufactures.The parameter extractionsare explained as follows.1)For the coefficients of the polynomial in the OCV expres-sion,we haveOCV(S oc(k))=b(1)S4oc(k)+b(2)S3oc(k)+b(3)S2oc(k)+b(4)S1oc(k)+b(5).(14)Based on the charge and discharge experimental data,the V–I data of the battery are obtained.Then,creating avector,a plot of OCV versus SOC can be obtained,fromwhich a polynomial function can befitted(see Fig.18).2)Based the battery data and using the following equation:R n=ΔVΔI(15)the battery internal resistance can be obtained.Fig.19 shows the charge internal resistance(3.47−3.33)/18=0.007778Ω.3)The parameter Q R is the rated capacity(in ampere-hours)and comes from the battery manufacturer.Because Q R is dependent on the battery temperature,it would accordingly be adjusted in a lookup table.4)Q d is the double-layer capacity(in ampere-hours).Based on the pulse charge or pulse discharge curve, Q d is derived from the battery voltage rise time:Q d= rise time∗current.5)M is the maximum polarization voltage(in volts)and canbe calculated using M=α+βln|i|+γΔS oc.The parametersαandβcan be extracted from pulse charge data.Fig.20shows M at a20-A pulse charge curve.In the same way,get another M to calculate the coefficientsαandβ.6)The adjustment coefficientγis an adjustment factorthat can be extracted from comparison of the simulation results with real charge and discharge curve.Fig.21shows battery voltage versus SOC at different charg-ing rates.The information can be used to obtain a function that relates the SOC and the OCV to predict the terminal voltage of the battery.V.S IMULATION IN S IMULINKA simulation was conducted to simulate charging at4A of the LiFePO4cell at16◦C.The parameters of the simulation are given in Table I.The initial SOC of the cell was zero.To examine the capability of the algorithm to track the real SOC, the initial SOC of the cell in the simulation was set at50%. Fig.22shows the results of the simulation under4-A charging. Scope1shows that the charge current is4A,scope2shows the battery voltage,and scope3shows the calculated voltage. Scope4shows the calculated SOC,scope5shows the real SOC, and scope6shows the SOC error.Based on scope6,we can see that the error between the simu-lated and the true SOC diminishes as the simulation progresses, confirming the capability of the algorithm.The simulation runtime is27942s,and the parameters used for simulation is set as shown in Table I.The percentage of error between the experimental and the simulated results are shown in Fig.23for charging and in Fig.24for discharging.The small error confirms the ability of the Kalmanfilter to accurately predict the SOC and the battery voltage.Another simulation is carried out to test the SOC estimation algorithm.Accordingly,the battery is charged with10A and with an initial SOC setting of0.5,but the true SOC of the battery was0.Fig.25shows the simulation results during charging.After Kalmanfiltering(about2000s later),the es-timated SOC becomes equal to the real SOC,thus proving the dynamic adjustability of the Kalmanfiltering method.VI.C ONCLUSIONIn this paper,the functional blocks of a BMS have been developed.The various functional blocks,e.g.,battery model, thermal management,and battery capability estimation,are integrated and simulated in the Simulink platform.The SOC estimation has been implemented using Coulomb counting with the SOC reset mechanism using the OCV method,thereby eliminating the limitation of the stand-alone Coulomb counting method.The Kalmanfiltering technique was used to improve the SOC estimation technique.The application of the Kalman filtering method in the battery algorithm significantly improves the accuracy of the SOC estimation,which is verified by experimental and simulation results.A PPENDIXTable II shows the specifications for the HP-56110160Li-ion phosphate battery.A CKNOWLEDGMENTThe authors would like to thank the Automotive Parts and Accessory Systems R&D Centre Limited(APAS),Hong Kong,particularly J.Xu,M.Haibo,W.Ting,H.Bufu,and C.H.Leung,for their technical support.R EFERENCES[1]C.R.Gould,C.M.Bingham,D.A.Stone,and P.Bentley,“New batterymodel and state-of-health determination through subspace parameter esti-mation and state-observer techniques,”IEEE Trans.Veh.Technol.,vol.58, no.8,pp.3905–3916,Oct.2009.[2]Y.-J.Lee,A.Khaligh,and A.Emadi,“Advanced integrated bidirectionalAC/DC and DC/DC converter for plug-in hybrid electric vehicles,”IEEE Trans.Veh.Technol.,vol.58,no.8,pp.3970–3980,Oct.2009.[3]H.L.Chan,K.W.E.Cheng,and D.Sutanto,“Phase-shift controlledDC–DC converter with bidirectional powerflow,”Proc.Inst.Elect.Eng.—Elect.Power Appl.,vol.148,no.2,pp.193–201,Mar.2001. [4]L.Solero,“Nonconventional on-board charger for electric vehicle propul-sion batteries,”IEEE Trans.Veh.Technol.,vol.50,no.1,pp.144–149, Jan.2001.[5]A.Szumanowski and Y.Chang,“Battery management system based onbattery nonlinear dynamics modeling,”IEEE Trans.Veh.Technol.,vol.57, no.3,pp.1425–1432,May2008.[6]S.Duryea,S.Islam,and wrance,“A battery management system forstand-alone photovoltaic energy systems,”IEEE Ind.Appl.Mag.,vol.7, no.3,pp.67–72,Jun.2001.[7]B.Hauck,BATTMAN—A Battery Management System,Milan,Italy,1992.。