动态神经网络的模型
- 格式:pdf
- 大小:375.98 KB
- 文档页数:6
神经网络中的动态神经元模型神经网络是一种模拟人脑中神经系统运作的系统,可以通过学习和适应来识别、分类和预测信息。
在神经网络的基本组成部分——神经元中,动态神经元模型是一种能够根据输入信号的强弱和频率进行调整的神经元模型。
在这篇文章中,我们将讨论神经网络中的动态神经元模型,包括它的特点、应用和未来发展方向。
一、什么是动态神经元模型神经元是组成神经网络的基本单元,可以看作是一种信息处理单元,它接收诸如视觉、触觉等各种信息,进行处理并将信息传递给其他神经元。
传统的神经元模型是基于阈值激活的,也就是说,神经元的输出只受到输入信号的幅度的影响,而与信号的频率无关。
动态神经元模型则考虑到了输入信号的频率对神经元输出的影响。
它的特点是根据输入信号的强弱和频率进行调整,并且可以产生周期性的输出。
这种具有动态调整机制的神经元模型可以更好地模拟人脑神经元的特性,能够更准确地进行信息处理和预测。
二、动态神经元模型的应用动态神经元模型在模拟人脑神经系统、图像处理、语音识别等领域中得到广泛应用。
以小波神经网络为例,它是一种利用小波变换进行信号处理的神经网络,其中的动态神经元模型可以对不同频率的信号进行不同的处理,精度高、鲁棒性强,适用于信号处理复杂的情况。
动态神经元模型在模拟人脑神经系统方面的应用也十分广泛。
例如,在人脑捕食行为的研究中,科学家使用动态神经元模型对神经元活动进行建模,分析捕食行为中信息的处理和神经元之间的相互作用。
这种研究有利于更好地了解人脑神经系统的特性和机制。
三、未来发展方向动态神经元模型作为神经网络的基本组成部分之一,已经得到了广泛的研究和应用。
未来,人们将继续深入研究动态神经元模型的特性和机制,以提高神经网络的性能和精度。
另外,随着人工智能的发展,动态神经元模型的研究将更加重要。
例如,在自动驾驶方面,动态神经元模型可以对驾驶员的转向、加减速等行为进行识别和模拟,从而提高自动驾驶的安全性和精度。
总之,动态神经元模型是神经网络中的一种重要组成部分,它的特点和应用将越来越受到研究者和应用者的关注。

神经科学中的脑网络动态:探索大脑神经网络的动态特性与认知功能的关系摘要大脑是一个极其复杂的系统,由数十亿个神经元通过复杂的网络连接而成。
理解大脑神经网络的动态特性及其与认知功能的关系,是神经科学领域的核心问题之一。
本文将深入探讨脑网络动态的研究进展,包括研究方法、主要发现以及对认知功能的启示。
我们将讨论静态和动态脑网络模型的差异,强调动态模型在捕捉大脑功能变化方面的优势。
此外,本文还将探讨脑网络动态在不同认知任务中的作用,以及其在神经精神疾病研究中的应用前景。
1. 引言大脑神经网络的复杂性一直是神经科学研究的焦点。
传统上,我们通过静态的脑网络模型来描述大脑的连接模式,但这种模型无法捕捉大脑功能的动态变化。
近年来,随着神经影像技术和计算方法的进步,我们开始认识到脑网络的动态特性,即神经元之间的连接强度和网络拓扑结构在时间和任务上的变化。
这种动态特性被认为与认知功能的灵活性密切相关。
2. 研究方法2.1 神经影像技术功能磁共振成像(fMRI)、脑电图(EEG)和脑磁图(MEG)等神经影像技术为研究脑网络动态提供了关键工具。
这些技术可以实时监测大脑活动,揭示神经元之间的动态相互作用。
2.2 计算方法图论、时间序列分析和机器学习等计算方法被广泛应用于分析神经影像数据,构建动态脑网络模型。
这些模型可以量化脑网络的拓扑属性、连接强度和时间变化模式。
3. 主要发现3.1 静态与动态脑网络模型静态脑网络模型描述了大脑的平均连接模式,但忽略了时间上的变化。
动态脑网络模型则可以捕捉到神经元之间连接强度的波动和网络拓扑结构的重组,更准确地反映大脑功能的动态特性。
3.2 脑网络动态与认知功能研究表明,脑网络动态与多种认知功能密切相关,包括注意力、记忆、决策和执行控制等。
例如,在执行任务时,大脑的不同区域会形成动态的功能网络,以支持特定的认知过程。
3.3 脑网络动态与神经精神疾病脑网络动态异常可能与多种神经精神疾病有关,如精神分裂症、抑郁症和自闭症等。

神经元网络建模的主要方法神经元是神经系统中最基本的处理单元,其通过电化学信号传递信息。
神经元网络模型是对生物神经网络进行的抽象,它的建立有助于对神经网络的功能进行理解和分析。
神经元网络模型可用于计算机视觉、语音识别、预测和控制等各种应用中。
到目前为止,人们发明了许多神经元网络建模方法,以下将介绍其主要方法。
1. 阈值感知器模型阈值感知器是一种最简单的神经元网络,由美国心理学家罗森布拉特(Rosenblatt)于1957年提出的,其结构和工作原理模拟了大脑中神经元的特征。
阈值感知器是一种单层神经元网络结构,其中输入信号通过经过加权的阈值函数,产生输出信号。
它的特点是处理速度很快,适用于处理一些比较简单的模式识别问题。
然而,阈值感知器存在一个限制:只能解决线性可分问题。
2. 反向传播模型反向传播模型是一种多层前馈神经元网络,由美国学者鲍莫(Baum)于1960年代提出,并由美国学者效苏本(Effector)和皮特布鲁克(Peter Brook)于1970年代进行改进。
它包含输入层、多个隐层和输出层,各层神经元之间互相连接。
反向传播模型通过不断迭代来更新权重值,使得模型能够提高预测精度。
其优点是适用于处理非线性可分问题和大规模神经网络问题,但其训练速度较慢,容易陷入局部极值。
3. 自适应神经元模型自适应神经元模型是一种基于反馈机制的神经元网络模型,它可以自适应地改变神经元的阈值和权值,以达到更准确的预测。
自适应神经元模型是一种动态学习方法,其不需要大量的训练数据,能够快速适应新的数据。
但是,由于其节点之间的连接具有长时滞,训练和使用都需要耗费大量的计算资源。
4. 循环神经元模型循环神经元模型可以在时间序列数据上建模,具有记忆和预测的功能。
它是一种基于时间和空间的神经网络模型,其中节点之间的连接具有时间依赖性。
循环神经元模型在时间序列数据处理、自然语言处理等领域有广泛应用,但它的训练难度较大,容易出现梯度消失/爆炸问题。
生物神经网络的模型构建与应用一、生物神经网络的概述生物神经网络是由生物神经元和突触相互作用形成的,通过神经元和突触间的化学和电信号传递,完成了生物大脑复杂的信息处理和运动控制。
而生物神经网络的成功启示人们对于人工智能和机器学习领域的研究,尤其是对于神经网络的研究和应用。
二、生物神经网络的模型人们为了研究生物神经网络,发展了多种各异的模型。
其中比较常见的模型有Hopfield模型、玻尔兹曼机、动态神经网络、神经元模型等。
下面我们详细介绍一下其中几个代表性的模型。
1.Hopfield模型Hopfield神经网络模型是第一种能够较好地模拟人脑神经元和突触动态的网络模型,在内容关联和优化问题处理中有广泛的应用。
它的核心思想是,在一个由n个节点组成的网络中,每个节点都与其他n-1个节点相连,其中每条边都有固定的权重,而节点之间的连接关系构成了一个完全对称的图。
Hopfield网络的特点是它的节点被设置为二值的,即取值只能是0或1。
而它的学习规则就是基于Hebbian Learning原则,即同样取1的两个节点之间连接权重增加,否则权重减少。
2.玻尔兹曼机玻尔兹曼机是一种有向无环图的节点层次模型,每个节点自身只有和同一层其他节点的连接,各节点间没有反向连接。
玻尔兹曼机通过不断的状态转移,不断的更新神经元的输出,从而完成最终的输入-输出映射。
它有两种状态,分别是有限温度的热平衡状态和绝对零度下的无序状态,而神经元彼此之间通过一个权重值来联系。
玻尔兹曼机的优势在于它能够快速处理多种类型的信息,易于学习和改进。
3.动态神经网络动态神经网络在网络中增加了时序变换,在时间上存在一定的连续性。
动态神经网络的几个优点是它能够快速的响应任何类型的输入信号,比如图像、声音等,并且具有一定的自适应性,即使在输入数据存在噪声的情况下仍能很好地工作。
三、生物神经网络的应用生物神经网络除了在神经科学领域的研究外,现在已经在计算机领域中得到了广泛的应用。
精品文档供您编辑修改使用专业品质权威编制人:______________审核人:______________审批人:______________编制单位:____________编制时间:____________序言下载提示:该文档是本团队精心编制而成,希望大家下载或复制使用后,能够解决实际问题。
文档全文可编辑,以便您下载后可定制修改,请根据实际需要进行调整和使用,谢谢!同时,本团队为大家提供各种类型的经典资料,如办公资料、职场资料、生活资料、学习资料、课堂资料、阅读资料、知识资料、党建资料、教育资料、其他资料等等,想学习、参考、使用不同格式和写法的资料,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!And, this store provides various types of classic materials for everyone, such as office materials, workplace materials, lifestylematerials, learning materials, classroom materials, reading materials, knowledge materials, party building materials, educational materials, other materials, etc. If you want to learn about different data formats and writing methods, please pay attention!RBF神经网络的结构动态优化设计1. 前言随着人工智能技术的快速进步,神经网络在各个领域中得到了广泛应用。
动力学神经网络模型的构建及其稳定性研究李立平;韩兵欣【摘要】Since the static artificial neural network has the complicated network structure while reflecting on the system dy?namic behavior,and can′t reflect on the system dynamic performance better,a new dynamics neural network model composed of the neuron with adjustable feedback coefficient and integrator is proposed. The new neural network can better reflect on the system dynamic performance than the previous dynamic network(recursion network)or the network improved on the basis of it, has simpler network structure and faster training process to make the system run better. The gradient descent method is used to study the weight adjustment algorithm of the network. The stability condition of the new dynamics neural network is discussed ac?cording to the Lyapunov stability criteria. The study of the network provides a better model structure and theory algorithm for re?flecting on the system dynamics behavior,and a new research direction for the development of the neural network.%针对静态人工神经网络具有在反映系统动态行为时网络结构复杂、不能很好地反映系统动态性能的缺点,提出一种由带有积分器和可调反馈系数的神经元构成的新型动力学神经网络模型。
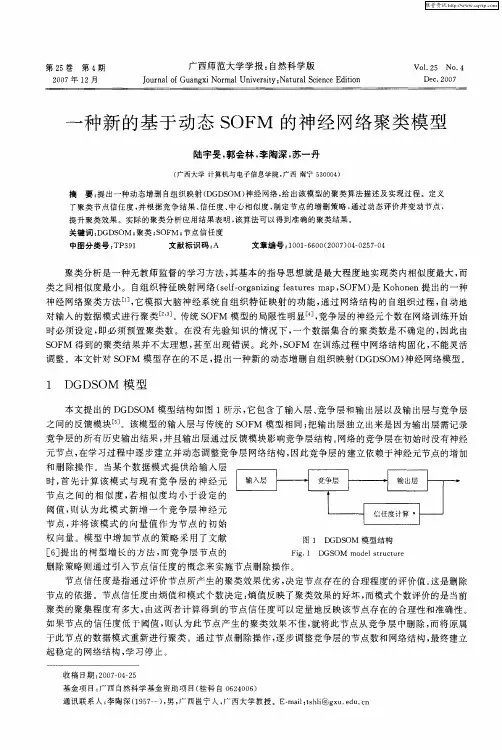
动态神经网络的模型李嘉刚(中国海洋大学信息科学与工程学院电子系,青岛264005)摘要:动态神经网络(DNN)由于具有很强的学习能力和逼近任意非线性函数的特点而被广泛应用。
本文主要介绍动态神经网络的几种常见模型,比较不同模型之间的区别,在此基础上介绍一下动态神经网络的功能及应用。
关键词:动态神经网络,动态神经网络模型神经网络按是否含有延迟或反馈环节可以分为静态神经网络和动态神经网络,含有延迟或反馈环节的神经网络称为动态神经网络。
动态神经网络主要包括Hopfield型神经网络及细胞神经网络模型。
Hopfield型神经网络模型是由N个节点全部互相联结而构成的反馈型动态网络系统。
由于它可以实现联想记忆,并能进行优化问题的求解,因而受到人们的高度重视,并对神经网络理论的研究产生了重大的影响。
细胞神经网络系统与Hopfield神经网络系统结构上有很大的相似之处,不同之处在于Hopfield神经网络系统的神经元为全联结,而细胞神经网络系统不是全联结。
反映在模型的数学表述上就在于关联矩阵的特性不一样。
特性的不一样就决定了它们的应用范围不一样。
细胞神经网络系统主要在图象处理和汉字识别等方面有良好的应用前景,因此也受到了人们的广泛关注[1]。
一、动态神经网络模型根据网络结构特点,将它们分为3类:全反馈网络结构,部分反馈网络结构以及无反馈的网络结构。
1.1全反馈网络全反馈网络的突出代表就是Hopfield网络,是由Hopfield在1982年提出的,如图1所示,是一种单层对称全反馈的结构。
Hopfield根据系统动力学和统计力学的原理,将“能量函数”的概念引入到对称Hopfield网络的研究中,给出了网络的稳定性判据。
可以证明,采用Hebb规则进行训练的Hopfield网络系统总是朝着能量减小的方向变化,最终进入稳定状态,即收敛于某个平衡点。
由于Hopfield网络的连接是全连接,因此当节点数目比较多时,网络的结构过于复杂,而网络结构中没有隐含层,使得网络的非线性性能较差,尤其是对于复杂的非线性动态过程系统,因此在一定程度上限制了它的应用[2]。
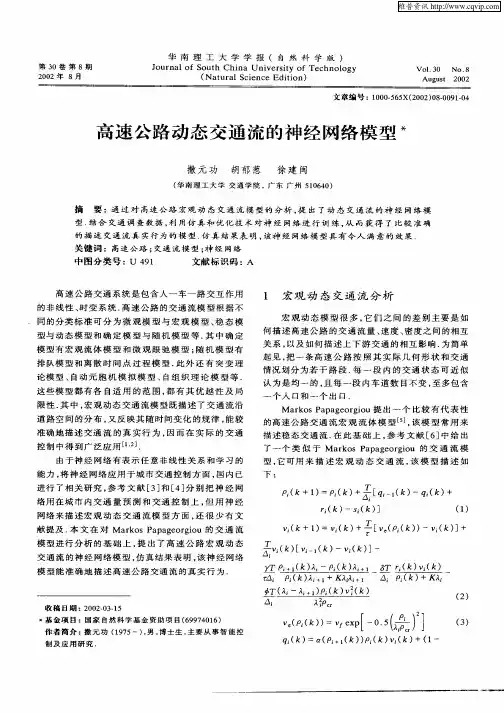
课时跟踪训练26动力学中的两类典型模型一、概述在动态系统的研究中,动力学模型是一种描述系统随时间演变的数学模型。
在课时跟踪训练中,动力学模型被广泛应用于描述学生学习过程中的变化。
本文将讨论动课时跟踪训练26动力学中的两类典型模型,分别是马尔可夫模型和神经网络模型。
二、马尔可夫模型1.1 概述马尔可夫模型是描述随机过程的数学模型,其基本假设是当前时刻的状态只与前一时刻的状态有关。
这种模型常用于描述具有某种随机性质的现象,如学生的学习状态转移、课程的难易程度变化等。
1.2 特点马尔可夫模型具有状态空间、转移概率以及初始概率分布等基本要素。
通过这些要素,我们可以建立状态转移矩阵,从而描述系统在不同状态下的演变情况。
在课时跟踪训练中,马尔可夫模型可以用来分析学生的学习路径,预测学习状态的变化,从而为教学提供依据。
1.3 应用在课时跟踪训练中,马尔可夫模型常用于分析学生的学习行为。
通过建立学生学习状态的转移矩阵,我们可以发现学生在不同知识点之间的学习路径,从而为个性化的教学提供支持。
三、神经网络模型2.1 概述神经网络模型是一种模拟生物神经网络结构和功能的数学模型。
其基本组成是神经元和连接权值,通过调整权值和激活函数的参数,神经网络可以模拟复杂的非线性关系,对学生学习过程进行建模。
2.2 特点神经网络模型的特点是可以适应非线性关系和复杂数据,具有强大的拟合能力和泛化能力。
在课时跟踪训练中,神经网络模型可以用来预测学生的学习状态、分析学习行为的特征、挖掘学生的潜在需求等。
2.3 应用神经网络模型在课时跟踪训练中有着广泛的应用。
通过监控学生的学习行为数据,我们可以建立神经网络模型,对学生的学习状态进行预测和分析,从而为教师提供决策支持。
神经网络模型也可以用来个性化推荐学习资源,帮助学生更好地提升学习效果。
四、总结课时跟踪训练26动力学中的两类典型模型,马尔可夫模型和神经网络模型,分别具有其独特的特点和应用优势。
神经网络算法及模型思维学普遍认为,人类大脑的思维分为抽象(逻辑)思维、形象(直观)思维和灵感(顿悟)思维三种基本方式。
人工神经网络就是模拟人思维的第二种方式。
这是一个非线性动力学系统,其特色在于信息的分布式存储和并行协同处理。
虽然单个神经元的结构极其简单,功能有限,但大量神经元构成的网络系统所能实现的行为却是极其丰富多彩的。
神经网络的研究内容相当广泛,反映了多学科交叉技术领域的特点。
主要的研究工作集中在以下几个方面:(1)生物原型研究。
从生理学、心理学、解剖学、脑科学、病理学等生物科学方面研究神经细胞、神经网络、神经系统的生物原型结构及其功能机理。
(2)建立理论模型。
根据生物原型的研究,建立神经元、神经网络的理论模型。
其中包括概念模型、知识模型、物理化学模型、数学模型等。
(3)网络模型与算法研究。
在理论模型研究的基础上构作具体的神经网络模型,以实现计算机模拟或准备制作硬件,包括网络学习算法的研究。
这方面的工作也称为技术模型研究。
(4)人工神经网络应用系统。
在网络模型与算法研究的基础上,利用人工神经网络组成实际的应用系统,例如,完成某种信号处理或模式识别的功能、构作专家系统、制成机器人等等。
纵观当代新兴科学技术的发展历史,人类在征服宇宙空间、基本粒子,生命起源等科学技术领域的进程中历经了崎岖不平的道路。
我们也会看到,探索人脑功能和神经网络的研究将伴随着重重困难的克服而日新月异。
神经网络和粗集理论是智能信息处理的两种重要的方法,其任务是从大量观察和实验数据中获取知识、表达知识和推理决策规则。
粗集理论是基于不可分辩性思想和知识简化方法,从数据中推理逻辑规则,适合于数据简化、数据相关性查找、发现数据模式、从数据中提取规则等。
神经网络是利用非线性映射的思想和并行处理方法,用神经网络本身的结构表达输入与输出关联知识的隐函数编码,具有较强的并行处理、逼近和分类能力。
在处理不准确、不完整的知识方面,粗集理论和神经网络都显示出较强的适应能力,然而两者处理信息的方法是不同的,粗集方法模拟人类的抽象逻辑思维,神经网络方法模拟形象直觉思维,具有很强的互补性。
动态神经网络的模型李嘉刚(中国海洋大学信息科学与工程学院电子系,青岛264005)摘要:动态神经网络(DNN)由于具有很强的学习能力和逼近任意非线性函数的特点而被广泛应用。
本文主要介绍动态神经网络的几种常见模型,比较不同模型之间的区别,在此基础上介绍一下动态神经网络的功能及应用。
关键词:动态神经网络,动态神经网络模型神经网络按是否含有延迟或反馈环节可以分为静态神经网络和动态神经网络,含有延迟或反馈环节的神经网络称为动态神经网络。
动态神经网络主要包括Hopfield型神经网络及细胞神经网络模型。
Hopfield型神经网络模型是由N个节点全部互相联结而构成的反馈型动态网络系统。
由于它可以实现联想记忆,并能进行优化问题的求解,因而受到人们的高度重视,并对神经网络理论的研究产生了重大的影响。
细胞神经网络系统与Hopfield神经网络系统结构上有很大的相似之处,不同之处在于Hopfield神经网络系统的神经元为全联结,而细胞神经网络系统不是全联结。
反映在模型的数学表述上就在于关联矩阵的特性不一样。
特性的不一样就决定了它们的应用范围不一样。
细胞神经网络系统主要在图象处理和汉字识别等方面有良好的应用前景,因此也受到了人们的广泛关注[1]。
一、动态神经网络模型根据网络结构特点,将它们分为3类:全反馈网络结构,部分反馈网络结构以及无反馈的网络结构。
1.1全反馈网络全反馈网络的突出代表就是Hopfield 网络,是由Hopfield在1982年提出的,如图1所示,是一种单层对称全反馈的结构。
Hopfield根据系统动力学和统计力学的原理,将“能量函数”的概念引入到对称Hopfield网络的研究中,给出了网络的稳定性判据。
可以证明,采用Hebb规则进行训练的Hopfield网络系统总是朝着能量减小的方向变化,最终进入稳定状态,即收敛于某个平衡点。
由于Hopfield网络的连接是全连接,因此当节点数目比较多时,网络的结构过于复杂,而网络结构中没有隐含层,使得网络的非线性性能较差,尤其是对于复杂的非线性动态过程系统,因此在一定程度上限制了它的应用[2]。
图1Hopfield网络结构图1.2部分反馈的神经网络全反馈的神经网络结构复杂,在实际应用的时候往往需要简化,同时保留动态的性能,比较典型的有Elman网络、Jordan网络、内回归网络、外回归网络等。
这样的网络结构常常是看作在多层前向网络的基础上加入各种反馈。
1.2.1Elman神经网络Elman神经网络是在三层前向网络的基础上将隐含节点输出反馈到输入端而得到的,如图2所示,包含虚线。
隐含节点的输出可以看作系统的状态(虚拟状态),因此这种反馈网络又叫做状态反馈网络。
Elman网络结构可由非线性离散时间系统的状态空间描述得出:Y(k+1)=f2(X(k+1))=f2(f1(X(k),U(k)))=f(X(k),U(k))由上式的,系统的k+1时刻的输出可以表示为第k时刻的系统状态和外界输入的函数。
值得注意的是,式中X为真实系统状态,而Elman网络中隐含节点输出没有具体的物理意义,但都起到记录过去的系统信息的作用。
隐含节点的数目或虚拟状态的数目可以凭借经验来确定,但这样的方式往往不可靠,而且费时;比较好的方法是采用剪枝法来确定虚拟状态的数目。
理论上,Elman网络可以对n阶系统建模,如果采用前向网络,则需要2n个输入节点,对于Elman网络输入节点只需要1个或者n+1个(这时反馈节点被看作是输入节点),因此Elman网络结构要简单得多。
Elman网络适用于一阶线性系统建模,对高阶系统有困难,大的学习速率导致振荡或者不稳定,学习速率小时又导致训练过程耗时大,又不能增加隐含层节点的数目太多。
基于此情况,提出了一种改进的Elman网络,即在反馈节点上加自反馈,系数为α,如图2中虚线所示。
α值在0-1之间,越接近1,则反馈中包含的过去的输出越多,因为系统的阶数与当前输出对过去时刻输入的依赖程度有关,自反馈的引入提高了Elman网络对高阶系统的建模能力。
Elman网络的训练可以采用传统的BP算法,也可以采用遗传算法(D.T.Pham,1999)[3]。
图2Elman网络结构图图3Jordan网络结构图1.2.2Jordan神经网络Jordan网络结构如图3所示,不包含虚线部分。
网络的输出反馈到输入层。
由非线性系统状态空间方程可以推出:X(k+1)=f-12(Y(k+1))Y(k+1)=f2(X(k+1))=f2(f1(X(k),U(k))=f2(f1(f-12(Y(k)),U(k))=f′(Y(k),U(k))从上式可知,系统k+1时刻的输出可以表示为k时刻的输出Y和输入U的函数的形式。
反映在网络结构上就是将网络的输出延迟一个时间步长后反馈到系统的输入端,从而得到Jordan网络结构。
Jordan网络也不能实现一般n阶系统的建模,因此,类似于修正的Elman网络,也将Jordan网络在状态层加自反馈进行修正,使得网络可以记住过去更多时刻状态的信息,网络的非线性性能大大提高。
D.T.Pham等结合这两种网络的特点,提出了一种混合网络结构,即网络中同时包含从输出层和隐含层来的反馈,此种网络理论上能对任意阶数线性动态系统和任意阶数的非线性系统建模。
1.2.3多层反馈RNN网络根据Elman网络及其局限性,文献中提出了适用于化工复杂系统建模的神经网络结构,如图4所示。
即在原Elman神经网络的基础上增加多层反馈子层,这样n个反馈子层可以保存n个时刻的隐含层节点的输出,各个反馈子层可进行短时记忆,与Elman网络比较,保存了更多的一些空间状态信息,更加接近实际模型,表现出更强的动态特性。
与改进的Elman网络相比,多层反馈子层与隐含层之间的连接权重可以在训练过程中不断的修正,更能真实地反映出过去时刻系统状态对当前时刻输出的贡献程度,而修正的Elman网络中的自反馈系数是不变的[4]。
图4多层反馈神经网络结构图5对角回归神经网络模型1.2.4对角回归神经网络对角回归神经网络根据对角回归元所在位置分为内回归对角神经网络(有的文献中也叫IRNN,即internal recurrent neural network)和外回归对角网络(ERNN,external recurrent neural network)。
前者是一种仅在网络隐含层有内部时延自反馈的神经网络结构,可以看作Elman网络的一种简化,结构简单,但也能实现动态映射。
隐含层中每一个均为激励函数为S型函数的回归元,如图5所示,其中,有阴影的神经元代表为对角回归元。
正因为对角回归元的存在使得网络具有很强的描述动态系统的能力。
方框中z-1表示延迟一个时间步长。
可以证明当网络采用梯度方法进行训练的时候,若学习速率满足一定的值,那么能保证在二次型指标函数下训练算法收敛。
外回归对角神经网络与对角回归神经网络结构类似,只是对角回归元在输出层。
根据两类网络的特点,提出的一种混合的对角回归神经网络(IERNN),具有更好的性能。
这一点类似于D.T.Pham提到的混合神经网络,而实际上这里的IERNN可以看作混合神经网络的简化形式。
1.3无反馈的神经网络结构1.3.1时延神经网络时延神经网络,即TDNN(time-delayed neural network)。
这种网络就是将实际系统的输入和输出的过去值当作网络的输入,下一个输出作为教师信号,结构如图6所示。
网络结构本身是静态的,但是通过时延输入,就把一个时域问题转变为空间领域的建模问题。
我们将离散时间系统状态空间表示通过变换而对此网络结构给出合理化的解释。
Y(k+1)=f2(X(k+1))=f2(f1(X(k),U(k)))=f′(X(k),U(k))=f″(X(k-1),U(k),U(k-1))=f(n-1)(X(k-n),U(k),…,U(k-n))如式上式所示,k+1时刻的输出可以表示为第k-n时刻系统状态和前n个时刻系统输入的函数,而当n足够大时,可以将X(k-n)项忽略,这样,k+1时刻的输出就表示为前n个时刻的输入变量的函数,即:Y(k+1)=f(U(k),U(k-1),…,U(k-n))(6)这种网络仍然是多层前向网络,优点就是利用现有的输入输出数据,算法成熟,网络模型收敛性好,缺点是输入变量多,容易受外界噪声的影响,对于高阶系统预测精度要差。
1.3.2DBPNN神经网络文献中提出一种DBPNN网络结构,在传统的多层前向网络的基础上加以改进,即利用输入时延,使得网络能够反应系统的动态特性,并通过引入集中节点,而使得网络的结构大为简化。
这样的网络结构已经成功地应用于炼油厂分馏装置质量参数预测建模中,与相应的静态BP网络所建立的模型比较,具有更高的预测精度。
网络结构如图7所示。
图6TDNN结构图图7DBPNN结构图二、动态神经网络的功能动态神经网络(DNN)具有很强的学习能力和逼近任意非线性函数的特点,自20世纪80年代末以来,将动态神经网络作为一种崭新的非线性模型引入复杂系统的建模中引起了许多学者广泛关注[2]。
动态神经网络现在广泛地用于模式识别、语音识别、图象处理、信号处理、系统控制、AUV自适应航向和机器人控制、故障检测、变形预报、最优化决策及求解非线性代数问题等方面。
2.1故障检测估计方法在故障检测中应用广泛,如发动机的故障检测。
用故障参数估计实现发动机故障检测,由于构建的发动机数学模型的不精确性,影响了检测性能。
静态反推神经网络可以实现系统的动态辨识过程,但反推神经网络的学习算法存在局部极小问题,在线学习收敛速度比较慢,不易满足工程上实时性要求。
动态神经网络直接用李雅诺夫方法推出神经网络的权值修改公式,得到稳定的学习规则,并且学习收敛到全局最优,因此可以考虑用动态神经网络来辨识发动机的动态响应过程,估计发动机传感器测量信号。
基于发动机测量信号与动态神经网络辨识信号得到的残差信号,然后将残差信号的的某一特定范数输入检测逻辑,得到发动机故障检测结果,实现动态神经网络的故障检测策略[3]。
2.2变形预报静态神经网络模型用于在线时间序列的预报时具有局限性,即网络的泛化能力有限,且模型不能不断地适应新增样本的变化。
如果每增加一个样本对神经网络重新训练,需要大量的计算时间。
由此产生了动态神经网络预报模型。
在获得新增样本数据之后,通过比较预报值与实际值之差的绝对值是否大于敏感因子a,决定模型是否需要修正。
使用在线动态修正方法降低了模型修正的计算时间,,实现了增加样本而矩阵阶数不增加,且避免了矩阵求逆运算,提高了计算效率。
该方法在计算时间和预报精度两个方面都具有一定优势,可应用于在线实时变形预报及相关领域[4]。
2.3模式信息处理和模式识别所谓模式,从广义上说,就是事物的某种特性类属,如:图像、文字、声纳信号、动植物种类形态等信息。