基于单片机的智能小车的设计与实现
- 格式:doc
- 大小:531.84 KB
- 文档页数:26

基于单片机的智能小车的设计摘要:本文基于单片机的智能小车的设计,旨在介绍如何利用单片机构建一台可以具备自主移动、避障、计算机视觉等功能的智能小车。
设计方案中,我们使用了Arduino单片机、红外避障传感器、超声波测距模块、直流电机等部件。
通过编写C程序,实现了小车的自主移动、避障、根据环境反应等功能。
设计方案中的Arduino单片机具有高度的集成度、易于学习和操作等优点,为初学者提供了一个不错的学习平台。
关键词:单片机、智能小车、避障传感器、计算机视觉引言:智能小车是一种能够自主移动、避障、计算机视觉等功能的机器人。
具有良好的控制和感知能力,可以广泛应用于工业自动化、机器人研究、教育等领域。
本文基于单片机的智能小车的设计,将介绍如何构建一台具有自主移动、避障、计算机视觉等功能的智能小车。
设计方案:本文采用的单片机是Arduino单片机,它具有高度的集成度、易于学习和操作等优点。
通过编写C程序,实现小车的自主移动、避障、计算机视觉等功能。
下面我们将详细介绍设计方案中所用到的部件。
1、红外避障传感器红外避障传感器是一种检测环境障碍物的传感器。
它通过发射红外线和接收红外线来探测周围的障碍物,进而实现小车的避障功能。
在本设计方案中,我们采用了4个红外避障传感器,分别装在小车前、后、左、右四个方向。
2、超声波测距模块超声波测距模块是一种测量距离的传感器。
它通过发射超声波并接收反射回来的波来测量与障碍物的距离。
在本设计方案中,我们使用超声波测距模块来帮助小车判断前方障碍物的距离。
3、直流电机直流电机是小车的驱动部分。
通过控制电机的正反转来实现小车的前进、后退和转向。
在本设计方案中,我们采用了两个直流电机来驱动小车。
编程实现:在编程的实现过程中,我们利用C语言编写了控制程序。
程序中通过Arduino单片机读取四个红外避障传感器、超声波测距模块的数据,并根据这些数据实时调整小车的运动状态。
下面是程序的主要流程:1、启动程序,初始化各个部件2、获取红外避障传感器的数据3、将传感器数据转换成小车需要控制的运动方向4、判断前方是否有障碍物5、根据判断结果调整小车运动方向6、重复执行2-5步,实现小车的自主移动和避障功能。
基于STM32的智能循迹小车的设计智能循迹小车是一种具有自主导航能力的智能移动机器人,能够根据预设的轨迹路径进行自主轨迹行驶。
该设计基于STM32单片机,采用感光电阻传感器进行循迹控制,结合电机驱动模块实现小车的前进、后退、转向等功能。
一、硬件设计1.MCU选型:选择STM32系列单片机作为主控芯片,具有高性能、低功耗、丰富接口等特点。
2.传感器配置:使用感光电阻传感器进行循迹检测,通过读取传感器的电阻值判断小车当前位置,根据不同电阻值控制小车行驶方向。
3.电机驱动模块:采用直流电机驱动模块控制小车的前进、后退、转向等动作。
4.电源管理:使用锂电池供电,通过电源管理模块对电源进行管理,保证系统正常工作。
二、软件设计1.系统初始化:对STM32单片机进行初始化,配置时钟、引脚等相关参数。
2.传感器读取:通过ADC模块读取感光电阻传感器的电阻值,判断小车当前位置。
3.循迹控制:根据传感器读取的电阻值判断小车相对于轨迹的位置,根据不同的位置控制小车的行驶方向,使其始终保持在轨迹上行驶。
4.电机控制:根据循迹控制的结果,通过电机驱动模块控制小车的前进、后退和转向动作。
5.通信功能:可通过串口通信模块与上位机进行通信,实现与外部设备的数据传输和控制。
三、工作流程1.初始化系统:对STM32单片机进行初始化配置。
2.读取传感器:通过ADC模块读取感光电阻传感器的电阻值。
3.循迹控制:根据读取的电阻值判断小车相对于轨迹的位置,控制小车行驶方向。
4.电机控制:根据循迹控制的结果,通过电机驱动模块控制小车的前进、后退和转向动作。
5.通信功能:可通过串口通信模块与上位机进行通信。
6.循环运行:不断重复上述步骤,实现小车的自主循迹行驶。
四、应用领域智能循迹小车的设计可以广泛应用于各个领域。
例如,在物流行业中,智能循迹小车可以实现自动化的物品搬运和运输;在工业领域,智能循迹小车可以替代人工,进行自动化生产和组装;在家庭生活中,智能循迹小车可以作为智能家居的一部分,实现家庭清洁和智能控制等功能。
基于单片机控制的智能小车一、设计背景随着人们物质生活水平的提高,汽车已经越来越普及,但交通事故也随之增加,危及了人们的财产及生命安全。
与此同时,随着科学技术的发展,探险、排爆等危险场合工作的机器人,以及自动化生产中运输小车的应用也日益广泛,汽车已经不再只是拥有四个轮子的交通工具,人们更加希望汽车作为日常生活以及工作范围的一种延伸。
所以智能小车的设计与发展是必须的,智能小车是一个集坏境感知、规划决策等功能于一体的综合系统,它集中的运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
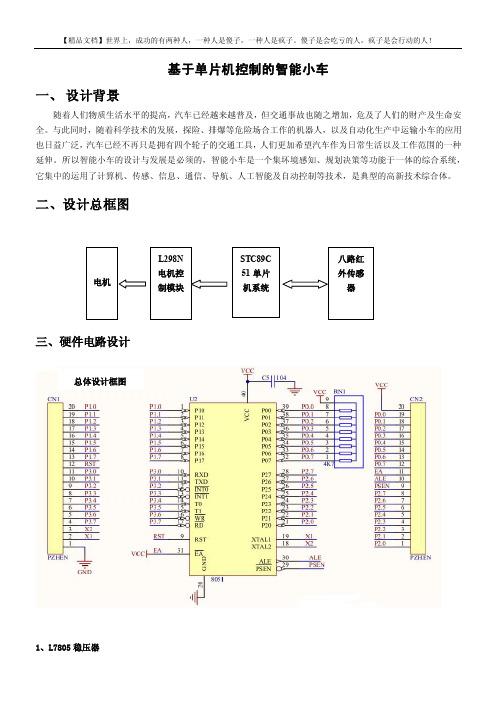
二、设计总框图三、硬件电路设计STC89C51单片机系统八路红外传感器L298N电机控制模块电机总体设计框图L7805是我们最常用到的稳压芯片,本设计中采用7节5号干电池进行供电,电容C2、C3对输入到L7805前的直流电进行滤波,之后输入到L7805,经其稳压后输出5V直流电,给单片机供电。
稳压电路2、八路红外传感器模块红外线在不同颜色的物体表面具有不同的反射性质,所以我们可以利用红外对管对黑线及障碍物进行检测;此模块拥有两个LM324放大器和两个74HC14D,当红外线在不同颜色物体上的反射光被接收管接收到时会产生不同幅度的电压,经由模块的LM324芯片进行信号放大,之后输入到74HC14D进行高低电平的转换。
小车在行驶过程中红外管不断地向外发射红外线,当红外光遇到白色地面时发生漫发射,反射光被接收管接收,模块输出低电平;如果遇到黑线则红外线被吸收,接收管接收不到信号,此时模块输出高电平;单片机通过程序控制不断检测模块输出引脚的高低电平从而实现信号的检测。
小车的避障原理与此类似,当红外管不断发出红外线,而在距小车前方6cm无障碍物时,红外线不发生反射,此时接收管接收不到反射光,模块输出低电平;当小车前方6cm内有障碍物时,红外管发出的红外线将会被反射回来,接收管接受到反射光,模块输出高电平。

基于STM32单片机的智能红外测温小车设计与实现1. 引言智能红外测温技术在现代工业、医疗、农业等领域中得到广泛应用,而基于STM32单片机的智能红外测温小车的设计与实现,可以实现自动测量、远程操作等功能,提高测温效率和准确性。
本文将详细介绍该智能红外测温小车的设计与实现过程。
2. 系统架构智能红外测温小车由STM32单片机、红外测温传感器、电机驱动模块、Wi-Fi模块等组成。
STM32单片机充当中央处理器,接收并处理红外测温传感器采集的数据,通过驱动模块控制小车的运动,同时通过Wi-Fi模块实现与外界的通讯。
3. 硬件设计3.1 STM32单片机选择与连接选择STM32系列单片机作为中央处理器,根据需求选择适当的型号(如STM32F103C8T6),并将其与其他硬件模块(如传感器和驱动模块)进行连接,实现数据的输入和输出。
3.2 红外测温传感器选择合适的红外测温传感器模块,通过连接到STM32单片机的模拟输入引脚,实现对环境温度的采集和测量。
3.3 电机驱动模块选择适当的电机驱动模块,通过连接到STM32单片机的输出引脚,控制小车的运动,包括前进、后退、左转和右转等操作。
3.4 Wi-Fi通讯模块选择合适的Wi-Fi通讯模块,将其连接到STM32单片机的串口或SPI接口,通过无线网络与其他设备(如PC或手机)进行通讯,实现遥控和数据传输等功能。
4. 软件设计4.1 系统初始化在STM32单片机中,初始化各个硬件模块,包括红外测温传感器、电机驱动模块和Wi-Fi通讯模块,配置相应的引脚和参数,为后续操作做好准备。
4.2 红外测温数据采集通过STM32单片机读取红外测温传感器采集的模拟量数据,并进行相应的数值转换和校准,得到实际的温度数值。
4.3 运动控制通过STM32单片机控制电机驱动模块,实现小车的前进、后退、左转和右转等运动操作。
根据红外测温数据的变化,可以自动调整小车的运动方向,实现对温度异常区域的快速检测。

能智造与信息技术基于STC89C52单片机的智能小车设计李亚振(安阳师范学院河南安阳455000)摘要:本设计主要器件有STC89C52单片机、RZ7899驱动芯片和N20直流减速电机,使用两节锂电池共7.4V 作为系统供电,经LM7805稳压芯片降压到5V 后为单片机系统供电,通过红外循迹模块和避障模块,实现S 形曲线行驶和避障功能。
通过控制电机驱动模块控制电机输出转速,改变车辆移动状态,实现转弯。
在行驶过程中,通过蜂鸣器播放音乐或充当汽车喇叭,同时设置灯光进行照明。
软件程序采用C 语言,通过keil 软件实现对小车的控制。
通过pcb 设计和实物调试,验证了该智能小车虽设计简单,但功能强大,应用广泛。
关键词:智能小车STC89C52单片机循迹PCB 设计中图分类号:TP23文献标识码:A文章编号:1674-098X(2022)04(a)-0058-04当前,社会新工艺、新技术快速发展,人工智能技术逐步成熟,并广泛应用于工业、农业、医疗等行业。
智能小车作为人工智能领域研究的重要分支,可以代替人类在一些危险环境下完成相关工作。
本设计以STC89C52单片机作为小车控制系统的核心处理器,包括驱动、红外循迹、避障和音乐播放等模块,通过对各模块的设计,全面说明该智能小车工作的基本原理。
1系统总体设计目标本设计增添红外线遥控电路,控制智能小车运动,功能除了前进后退,还可以按照设置路线行驶并躲避障碍物,利用C 语言程序设置智能小车的运动状态,在编写代码时写入不同的音乐模块,调试实现小车的多功能运行[1]。
系统设计框图如图1所示。
2系统模块设计2.1电源输入模块本设计选用7.4V 可充电锂电池,可以循环使用,经过LM7805稳压芯片后,给单片机和外围器件提供供电。
电机驱动的芯片由7.4V 锂电池直接提供。
二极管D1起着防反接的作用,LED2作为电源指示灯,当开关SW1打开时,系统就会开始供电。
电源输入原理图如图2所示。

基于单片机的智能循迹小车设计智能循迹小车是一种基于单片机控制的小型车辆,通过传感器检测路面信息,结合预设路线实时调整行驶方向,实现自动循迹行驶。
智能循迹小车在无人驾驶、智能物流、探险救援等领域具有广泛的应用前景。
智能循迹小车的硬件主要包括单片机、传感器、电机和电源。
其中,单片机作为整个系统的控制中心,负责接收传感器信号、处理数据并输出控制指令;传感器用于检测路面信息,一般选用红外线传感器或激光雷达;电机选用直流电机或步进电机,为小车提供动力;电源为整个系统提供电能。
智能循迹小车的软件设计主要实现传感器数据采集、数据处理、控制指令输出等功能。
具体来说,软件通过定时器控制单片机不断采集路面信息,结合预设路线信息进行数据分析和处理,并根据分析结果输出控制指令,实现小车的自动循迹。
为提高智能循迹小车的稳定性和精度,需要对算法进行优化。
常用的算法包括PID控制、模糊控制等。
通过对算法的优化,可以实现对路面信息的精确检测,提高小车的循迹精度和稳定性。
为验证智能循迹小车的实际效果,需要进行相关测试。
可以在平坦的路面上进行空载测试,检验小车的稳定性和循迹精度;可以通过加载重量、改变路面条件等方式进行负载测试,以检验小车在不同条件下的性能表现;可以结合实际应用场景进行综合测试,以验证智能循迹小车在实际应用中的效果。
测试环境的选择要具有代表性,能够覆盖实际应用中可能遇到的各种情况。
测试过程中要保持稳定的行驶速度,以获得准确的测试数据。
对于测试过程中出现的问题,要及时记录并分析原因,以便对系统进行改进。
测试完成后,要对测试数据进行整理和分析,评估系统的性能表现,提出改进意见。
通过以上测试,我们发现基于单片机的智能循迹小车在循迹精度、稳定性等方面表现良好,能够满足实际应用中的需求。
同时,通过对算法的优化和硬件的改进,可以进一步提高小车的性能表现。
本文介绍了基于单片机的智能循迹小车的设计和实现过程。
通过合理选择硬件和优化软件算法,实现了小车的自动循迹功能。
实现智能小车的设计报告
一、项目背景
智能小车是一款结合了机械、机电、计算机等多种技术的智能机器人,能够获取环境信息、自主探索并完成各种任务。
智能小车在工业自动化、智能家居、物流配送等领域有着广泛地应用,在科研和商业领域都有着重要的地位和作用。
二、项目目的
本项目旨在通过设计制作智能小车,探索机器人控制、机械设计及电路控制等多方面知识,并应用到实际中,提高学生工程设计能力和动手能力。
三、设计方案
本智能小车采用树莓派单片机控制,配合多种传感器实现环境感知、路径规划和控制等功能。
车身采用3D打印技术制作,机身外型为椭圆形,具有一定的稳定性和降低空气阻力的特点。
底盘采用两轮驱动设计,其中一轮为万向轮,以提高小车的灵活性和控制性能。
四、技术方案
1.单片机控制
树莓派作为本项目的主控制器,采用GPIO输出信号控制各种功能模块,包括机械模块、传感器模块和电路模块等。
2.传感器模块
小车的传感器模块包括超声波传感器、巡线传感器、红外避障传感器等,这些传感器用于获取小车周围环境信息,提高小车的自主探索和避障能力。
3.路径规划
小车的路径规划采用A*算法,根据当前位置、目标位置以及环境地形等因素制定最优路径,并实时更新路径信息。
4.电路控制
小车的电路控制采用PWM技术,控制小车速度和方向,配合电池电量检测和保护电路等技术,保证小车的安全和稳定性。
五、结论
通过本项目的实践设计,掌握了机器人控制、机械设计和电路控制等技术,加深了对工程设计的理解,提高了动手操作能力。
同时,本项目的可拓展性和适用范围广泛,具有较高的应用价值和发展前景。
目录中文摘要 (2)英文摘要 (3)1 引言 (4)2 方案论证 (5)2.1 控制核心的选择及其简介 (5)2.1.1 SPCE061A单片机简介 (5)2.2.2 61板简介 (6)2.2.3 集成开发环境(IDE)简介 (7)2.2 小车驱动方式的选择 (7)2.3 语音播放和语音识别模块 (7)2.4 光电检测模块 (8)2.5 障碍检测模块 (9)3 系统硬件设计 (10)3.1 车体结构及其驱动电路 (10)3.2 循线模块 (13)3.2.1 循线硬件电路设计 (13)3.2.2 循线传感器的安装 (15)3.3 避障模块 (17)3.3.1 避障硬件电路设计 (18)3.3.2 避障硬件电路的制作与安装 (24)3.4 硬件完成后的小车总体图 (25)4 系统软件设计 (27)4.1 主程序设计 (27)4.2 循线模块程序设计 (28)4.3 障碍检测模块程序设计 (29)4.4 语音播放程序设计 (31)5 使用说明 (33)结论 (35)谢辞 (36)参考文献 (37)附录1 (38)附录2 (40)附录3 (41)附录4 (43)附录5 (44)基于单片机控制的智能小车设计与制作摘要: 课题的主要任务是设计并制作一辆智能小车,要求实现小车的语音控制、循线行走、避免撞到障碍物三大功能。
设计以凌阳16位单片机为控制核心,应用光电传感器和超声波传感器,成功实现了小车的三大功能。
课题完成了光电传感器和超声波传感器的选择、采购、各传感器的接口电路设计和制作,以及各传感器和电路的安装位置和方式的安排,并完成了整个硬件的制作工作。
此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。
关键词:智能小车,光电传感器,超声波传感器,单片机Abstract:This subject is to design and manufacture an intelligent car, whose three functions are car’s voice control, following the lin e to run, avoiding hittingthe obstacles. This design takes the Ling Yang 16 monolithic integratedcircuits as the control core, and with applying the photoelectric sensor andthe ultrasonic sensor, the car's three functions have realized. The designerhas completed the choice and purchase of the photoelectric sensor andultrasonic sensor, the design and manufacturing of various sensors' interfacecircuit, the installment position and arrangement preparation of the sensorsand circuit, as well as the entire hardware's manufacturing work. At thesame time, the control software's design and the program’s establishmentand debugging are finished. Finally completes the software and hardware'sfusion, which realizes the car's anticipated function.Keywords:intelligent car,photoelectric sensor,ultrasonic sensor,SCM1 引言当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。
随着科技的发展,单片机作为一种常用的微控制器,已经在各个领域得到了广泛应用。
在玩具领域,特别是玩具小车的设计中,单片机的运用也越来越普遍,可以实现各种有趣的功能。
本文将介绍一种基于单片机的多功能玩具小车的设计与实现。
二、设计目标1. 实现无线遥控功能,通过遥控器实现对小车的控制。
2. 设置超声波避障模块,让小车能够自动避开障碍物。
3. 小车可通过蓝牙模块与手机进行连接,实现手机APP控制。
4. 为小车设计多种灯光效果,增添趣味性。
5. 使用音乐模块,使小车产生丰富的声音效果。
三、硬件设计1. 主控芯片选择了常用的Arduino单片机。
2. 驱动模块选用了直流电机驱动模块,实现小车的前进、后退和转向。
3. 采用了超声波传感器模块,用于检测障碍物并实现避障功能。
4. 蓝牙模块选用了蓝牙串口模块,实现与手机的数据传输和控制。
5. 设计了多种灯光效果,包括LED灯和彩色灯带。
6. 音乐模块选用了声音传感器模块,可以发出不同的声音效果。
四、软件设计1. 编写了小车的控制程序,包括前进、后退、左转、右转等基本控制2. 通过编写遥控器程序,实现了对小车的无线遥控功能。
3. 编写了避障算法,使小车能够自动避开障碍物。
4. 开发了手机APP,通过蓝牙模块与小车进行连接和控制。
5. 设计了多种灯光效果的控制程序,可以实现闪烁、变色等效果。
6. 编写了音乐模块的程序,可以根据指令发出不同的声音效果。
五、实现效果1. 小车可以通过遥控器实现前进、后退、左转、右转的基本功能。
2. 超声波传感器可以准确检测到障碍物,并成功避开。
3. 通过手机APP可以实现对小车的遥控和控制各种功能。
4. 多种灯光效果可以有效增加小车的趣味性。
5. 音乐模块发出的声音效果丰富多彩,增加了小车的趣味性。
六、总结与展望本文介绍了一种基于单片机的多功能玩具小车的设计与实现,通过结合硬件设计和软件设计,实现了多种有趣的功能。
未来,可以进一步优化设计,增加更多的传感器模块和功能模块,使小车的功能更加丰富多样。
基于单片机的红外遥控智能小车设计引言:随着科技的不断发展,智能物联网已经走进了我们的生活。
智能小车作为一种智能化的产品,能够实现远程遥控、自动避障等功能,受到了广大消费者的青睐。
本文就基于单片机的红外遥控智能小车设计进行详细介绍。
一、设计目标本设计的目标是通过红外遥控,实现对智能小车的远程控制,小车能够根据收到的指令进行行驶、避障等操作。
二、设计原理1.主控芯片:本设计使用单片机作为主控芯片,常用的单片机有51系列、AVR系列等,可根据实际需求选择合适的芯片型号。
2.红外遥控模块:红外遥控模块是实现红外通信的设备,可以将遥控器发出的红外信号解码成数据,实现遥控操作。
3.电机驱动模块:电机驱动模块可将单片机的PWM信号转化为电机的动力驱动信号,控制小车的行驶方向和速度。
4.超声波传感器:超声波传感器可以感知到小车前方的障碍物距离,根据测得的距离,进行相应的避障操作。
5.电源模块:小车需要使用适当的电源,通常是锂电池或者直流电源供应。
三、系统设计1.硬件设计:(1)搭建小车底盘:根据所选择的底盘,搭建小车结构,并安装好电机驱动模块、电源模块等硬件设备。
(2)连接电路:将红外遥控模块、超声波传感器等硬件设备与主控芯片进行连接,确保每个模块正常工作。
2.软件设计:(1)红外遥控程序设计:通过红外遥控模块接收红外信号,并解码成相应的指令。
根据指令控制电机驱动模块,实现小车的行驶方向和速度控制。
(2)超声波避障程序设计:根据超声波传感器测得的距离,判断是否有障碍物,如果有障碍物就停止或者转向。
四、实验结果和讨论经过实验验证,本设计的红外遥控智能小车能够准确接收红外信号,并根据指令控制小车的行驶方向和速度。
同时,超声波传感器能够及时感知到前方的障碍物,并进行相应的避障操作。
然而,该设计仍然存在一些不足之处,比如超声波传感器的测距范围有限,可能无法感知到较小的障碍物。
此外,红外遥控信号的传输距离也有一定限制,需要保持遥控器与小车之间的距离不过远。
摘要智能小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先写好的下,不受人为管理时能够自动实现循迹避障的高新科技。
该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。
在本文论述了基于单片机的智能小车的控制过程。
该智能小车是基于自动引导机器人系统,用以实现小车自动寻找障碍物,撞击障碍物,将其撞到擂台下面。
本设计采用STC12C5A60S2单片机作为小车的控制核心;采用E18-D50NK红外漫反射式开关传感器作为小车的寻障模块来识别擂台上的障碍物,采集信号并将信号转换为能被单片机识别的数字信号;采用继电器来控制直流电机,其中软件系统采用C语言编程,本设计的电路结构简单,容易实现,可靠性高。
关键词:单片机;避障;C语言;AbstractIntelligent tracing electric trolley is an advanced technology to realize automatic tracing navigation. It is out of human management but under the designed mode that use of the use of a transducer, single chip, motor drive and automatic control .This technology has been applied in unmanned vehicle, unmanned factory, warehouse, service robot and many other fields.This paper discusses the intelligent trolley control process. Automatic tracing is used to make the car indentify obstacle automatically , and knock the obstacle, based on the automatic guide robot system.During the design of Intelligent trolley, STC12C5A60S2 single clip is used as the control core; at the same time with E18-D50NK reflective infrared transducer switch to identify the obstacle, which used as the car tracing module,it can gather the signal and transfer it into digital signal that can be recognized by single chip. And the driving chip Relay can control direct current motor. Among which the software system is using C program. In a nutshell, the design of the circuit has the advantages of simple structure, easy implementation, and high reliability.Key words:single chip microcomputer; automatic tracing; driving circuit目录1 绪论 (1)2 智能小车总体设计方案 (2)2.1 整体设计方案 (2)2.1.1 系统设计步骤 (2)2.1.2 系统基本组成 (2)2.2 整体控制方案确定 (3)3 系统的硬件设计 (5)3.1 单片机电路的设计 (5)3.1.1 单片机的功能特性描述 (5)3.1.3 中断系统介绍 (6)3.1.4 定时/计数功能介绍 (7)3.1.5 晶振电路 (7)3.1.6 复位电路 (8)3.2 光电传感器模块 (9)3.2.1 传感器分布 (10)3.3 电机驱动电路 (10)3.3.1电机驱动原理 (11)3.3.2 小车运动逻辑 (11)4 系统的软件设计 (13)4.1 软件设计的流程 (13)4.2 主程序设计流程图流程 (14)5 系统的总体调试 (15)5.1 硬件的测试 (15)结论 (16)参考文献 (17)附录A 原理图及PCB图 (18)附录B 程序代码 (19)附录C 硬件实物图 (23)1 绪论进入二十一世纪,随着计算机技术和科学技术的不断进步,机器人技术较以往已经有了突飞猛进的提高,智能小车即带有视觉和触觉的小车就是其中的典型代表。
现在全世界越来越多的国家都在做着研究智能化、多样化的自动汽车导航的工作。
自动汽车导航是一个非常复杂的系统,它不仅应具有正常的运动功能的成分,而且还应具有任务分析,路径规划,信息感知,自主决策等类似人类的智能行为。
人类可以利用自己的听觉、视觉、味觉、触觉等功能获取事物的信息,人类的大脑再根据已经掌握的知识对这些信息进行综合分析,从而全面了解认知事物。
这样一个认识事物、分析事物和处理信息的过程称之为信息融合过程。
多传感器信息融合的基本原理就是模仿人类大脑的这个过程,得到一个对复杂对象的一致性解释或结论。
多传感器信息融合是协调多个分布在不同地点,相同或不同种类的传感器所提供的局部不完整观测量信息加以综合,协调使用,消除可能存在的冗余和矛盾,并加以互补,以减少不确定性,得到对物体或环境的一致性描述的过程。
多传感器信息融合具有许多性能上的优点:(1)增加了系统的生存能力;(2)减少了信息的模糊性;(3)扩展了采集数据覆盖范围;(4)增加了可信度;(5)改善了探测性能;(6)提高了空间的分辨力;(7)改善了系统的可靠性(8)信息的低成本性。
本文主要由五章组成,第1章为绪论,主要讲述循迹小车的发展历程及在目前所应用领域中的作用。
第2章为总体规划智能小车系统的设计,包含主系统流程图。
第3章是系统的硬件设计,其中包含单片机电路的设计,光电传感器模块和电机驱动电路。
第4章为系统的软件设计,主要介绍的是软件实现过程的框图。
第5章是对硬件的调试,最终保证了系统的正常运行。
2 智能小车总体设计方案2.1 整体设计方案本系统采用简单明了的设计方案。
通过E18-D50NK红外漫反射式开关传感器来检测障碍物,决定行走路经,然后由STC12C5A60S2通过IO口控制继电器驱动模块改变4个直流电机的工作状态,最后实现小车运动行程。
2.1.1 系统设计步骤(1)根据设计要求,确定控制方案。
(2)利用Protel 99se设计合理的硬件原理图。
(3)画出程序流程图,使用C语言进行编程。
(4)将各元件焊接在PCB板上,并将程序烧录到单片机内。
(5)进行调试以实现控制功能。
2.1.2 系统基本组成智能小车主要由STC12C5A60S2单片机电路、E18-D50NK寻障模块、继电器驱动模块、直流电机、小车底板、电源模块等组成。
图2.1 智能循迹小车控制系统结构框图(1)单片机电路:采用STC12C5A60S2芯片作为控制单元。
40个引脚,内部60K字节的Flash片内程序存储器,E2R的4K字节,数据可以存储1024个字节的随机存取数据存储器(RAM),32个外部双向输入/输出(I/ O)端口,5个中断优先级,两个层中断嵌套,3个16位可编程定时计数器,两个全双工串行通信口,看门狗电路,片内时钟振荡器,速度是传统的51单片机微控制器8到12倍。
(2) E18-D50NK寻障模块:采用脉冲调制漫反射式红外发射接收器作为寻障传感器,调制信号带有交流分量,可减少外界的大量干扰。
信号采集部分就相当于智能循迹小车的眼睛,由它完成障碍物识别并生产高、低平信号传送到控制单元,然后单片机生成指令来控制驱动模块来控制两个直流电机的工作状态,来完成自动寻障。
(3)继电器驱动模块:采用电磁式继电器作为电机驱动芯片。
电磁式继电器一般由铁芯、线圈、衔铁、触点簧片等组成的。
只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。
当线圈断电后,电磁的吸力也随之消失,衔铁就会在弹簧的反作用力返回原来的位置,使动触点与原来的静触点(常闭触点)吸合。
这样吸合、释放,从而达到了在电路中的导通、切断的目的。
(4)直流电机:采用直流电动机。
直流电动机的控制方法比异步电动机简单,只需给电机两条控制线加上适当的电压就能使电机旋转,在正常工作电压范围,电压越高直流电机转速越高。
直流电动机调速方法分为两种:一种是直接调整电压,另一种通过PWM调速。
PWM调速就是使加在直流电机两端的电压波形为矩形波,改变矩形波的占空比就能实现电压的改变,从而实现电机转速的改变。
(5)电源模块:由4个串联3.7V18650电池作为电源。
通过7805稳压芯片稳压,通过0.1uF和470μF电容进行滤波。
2.2 整体控制方案确定图2.2为智能小车的系统控制框图。
障碍物是小车跟踪的目标,检测系统检测障碍物的位置,然后将此信息输入到单片机,单片机处理此信息后,将控制命令输出到驱动模块,以控制小车的直流电机,保证小车快速平稳地撞击障碍物。
图2.2 智能循迹小车系统控制框图采用4个118650可充电池组作为主电源。
STC12C5A60S2单片机作为主控制器。
因为小车电机内部装有减速齿轮组,所以不需考虑调速功能,采用电机驱动芯片电磁式继电器控制直流电机,而不使用步进电机。
电磁式继电器是利用内部触点的吸合与释放,达到了在电路中的导通、切断的目的。
即可以对电机进行正转、反转和停止操作,亦能满足直流减速电机的要求,用该芯片作为电机驱动具有的操作方便、稳定性好等优点。
这样单片机和寻障传感器组成了一个带有反馈信号的系统。
3 系统的硬件设计3.1 单片机电路的设计一个单片机应用系统的硬件电路设计包含两部分内容:一是系统扩展,即单片机内部的功能单元,如ROM、RAM、I/O、定时器/计数器、中断系统等不能满足应用系统的要求时,必须在片外进行扩展,选择适当的芯片,设计相应的电路;二是系统的配置,即按照系统功能要求配置外围设备,如键盘、显示器、A/D、D/A转换器等。
3.1.1 单片机的功能特性描述单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。