三维空间几何坐标变换矩阵PPT幻灯片课件
- 格式:ppt
- 大小:390.50 KB
- 文档页数:27


三维变换矩阵
3D变换矩阵,也称作三维变换矩阵,是一种用来描述三维空间中的坐标变换的数学技术。
它允许某一复杂的坐标变换来从一个三维空间位置转换到另一个三维空间位置。
3D变换矩阵可以用于实现平移、旋转和缩放操作。
3D变换矩阵通常由一个4×4的数组表示,其中每个元素是相应的坐标变换的系数。
数组的前三行表示的是旋转、缩放及位移的系数,最后一行是三维空间的常量。
基于此,
可以表示为M=
[r1,r2,r3,t]
其中,
ri=(i,j,k)T ,i=1,2,3
t=(x,y,z,1)T
r1=(cosqx,cosqy,cosqz,0)T
这里, qx, qy, qz 代表旋转轴极坐标系中的三个分量,t(x,y,z) 表示坐标空间中
的三维位置偏移量,1表示三维空间中的常量。
旋转矩阵可以通过类似下面的数学形式来表达:
Rx(qx)=
[1,0,0,
0, cosqx, -sinqx,
其中,Rx表示绕x轴旋转qx弧度,cosqx和sinqx表示其中的余弦和正弦函数的值。
同样的操作行可以用于Ry(qy)和Rz(qz)矩阵,其中qy和qz是绕y轴和z轴旋转的弧度。
可以从上面的是就可以看出,一个3D变换矩阵的形式会由一系列绕着不同轴的旋转
量和一个位移量组成,可以用来将一个任意位置的三维坐标转换到另一个任意位置。
由于
3D变换矩阵是一个4×4的矩阵,它可以用来处理很多类型的变换操作,比如缩放、旋转、平移和投影等。
因此,3D变换矩阵已经成为三维计算机图形学的一个重要组成部分,用于描述任意的三维空间变换。


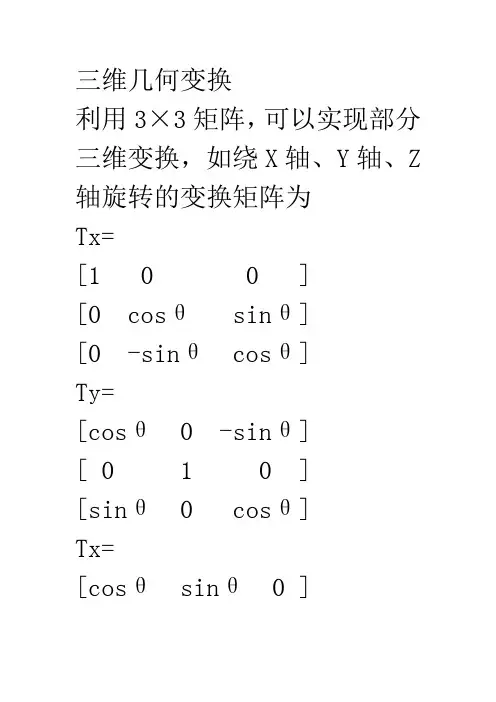
三维几何变换利用3×3矩阵,可以实现部分三维变换,如绕X轴、Y轴、Z 轴旋转的变换矩阵为Tx=[1 0 0 ][0 cosθ sinθ][0 -sinθ cosθ]Ty=[cosθ 0 -sinθ][ 0 1 0 ][sinθ 0 cosθ]Tx=[cosθ sinθ 0 ][-sinθ cosθ 0][ 0 0 1]但是,利用齐次坐标变换更方便。
三维空间点[X Y Z]用四维齐次坐标表示为[X Y Z]或[X’Y’ Z’ H],因此三维空间点的变换可写为[X Y Z H]T=[X’ Y’ Z’H]=[X’/H Y’/H Z’/H1]=[X’ Y’ Z’ 1]式中T为变换矩阵,与二维变换矩阵对应,三维变换矩阵为4×4方阵,即T=[a b c|p][d e f|q][h i j|r][-------|-][l m n|s]=[3×3|3×1][----|----][1×3|1×1]此方阵也可以分为4个部分,由二维变换可知,其中3×3矩阵起比例变换,映射变换,错切变换和旋转变换的作用,1×3矩阵起平移变换的作用,3×1矩阵起透视变换的作用,而1×2矩阵起比例变换的作用,下面通过具体图例说明各部分算子的作用,也就是基本三维几何变换。
1、三维比例变换在3×3矩阵中,主对角线上算子a、e、j控制比例变换,令其他算子为零,则三维点[X Y Z]的比例变换写为[X Y Z 1]·S=[X Y Z 1][[a 0 0 0][0 e 0 0][0 0 j 0][0 0 0 1]]=[aX eY jZ 1]=[X* Y* Z* 1]由上式可知,a、e、j分别控制X、Y、Z的比例变换,若令a=e=j=1,则算子S可使整个图形按同一比例放大或缩小。
[X Y Z 1][[1 0 0 0][0 1 0 0][0 0 1 0][0 0 0 1]]=[X Y Z S]=[X/S Y/S Z/S 1]=[X* Y* Z* 1]上式中,若S>1,则整个图形缩小;若S<1,则整个图形放大。
三维坐标变换矩阵
三维坐标变换矩阵是计算机图形学中非常重要的概念,它是用来
描述三维空间中的对象在进行各种变换时所采用的数学工具。
在三维
空间中,我们需要进行平移、旋转、缩放等一系列操作,这些操作都
要建立在坐标变换矩阵的基础之上。
三维坐标变换矩阵的形式一般为4X4的矩阵,其中包含了平移、
旋转、缩放等变换信息。
在建立三维坐标变换矩阵时,需要先确定操
作的顺序,再将每个操作分别对应到矩阵的不同位置,最后将这些操
作的矩阵相乘,得到最终的三维坐标变换矩阵。
三维坐标变换矩阵的建立有多种方法,其中最常用的是欧拉角法
和四元数。
欧拉角法是将旋转分解为绕x、y、z轴的三个旋转角度,
这种方法易于理解,但在旋转过程中容易产生“万向锁”问题。
而四
元数法则采用四维的数学概念描述旋转操作,避免了“万向锁”问题,但需要一定的数学基础。
三维坐标变换矩阵在三维图形学中有着广泛的应用,例如在三维
物体的运动、视角的变化、光照模型等方面都会用到。
在实际应用中,我们需要深入理解三维坐标变换矩阵的概念和原理,熟练掌握其生成
方法和应用技巧。
同时,还需要注意矩阵的精度问题,避免误差的积
累导致结果不准确。
总之,三维坐标变换矩阵是计算机图形学中重要的概念,它为我
们提供了描述三维空间中对象运动和变换的基础工具。
在三维图形学
的学习和实践中,深入理解和掌握三维坐标变换矩阵的原理和应用方法,对于提高图形学的实现和效果,都有着重要的指导意义。