第六章 空间点阵
- 格式:ppt
- 大小:3.11 MB
- 文档页数:37

![空间点阵[资料]](https://uimg.taocdn.com/086e9f5032687e21af45b307e87101f69e31fb68.webp)
-空间点阵空间点阵到底有多少种排列形式?按照“每个阵点的周围环境相同”的要求,在这样一个限定条件下,法国晶体学家布拉菲(A. Bravais)曾在1848年首先用数学方法证明,空间点阵只有14种类型。
这14种空间点阵以后就被称为布拉菲点阵。
空间点阵是一个三维空间的无限图形,为了研究方便,可以在空间点阵中取一个具有代表性的基本小单元,这个基本小单元通常是一个平行六面体,整个点阵可以看作是由这样一个平行六面体在空间堆砌而成,我们称此平行六面体为单胞。
当要研究某一类型的空间点阵时,只需选取其中一个单胞来研究即可。
在同一空间点阵中,可以选取多种不同形状和大小的平行六面体作为单胞,如图1-8所示。
一般情况下单胞的选取有以图1-8 空间点阵及晶胞的不同取法图1-9面心立方阵胞中的固体物理原胞图1-10晶体学选取晶胞的原则下两种选取方式:1.固体物理选法在固体物理学中,一般选取空间点阵中体积最小的平行六面体作为单胞,这样的单胞只能反映其空间点阵的周期性,但不能反映其对称性。
如面心立方点阵的固体物理单胞并不反映面心立方的特征,如图1-9所示。
2.晶体学选法由于固体物理单胞只能反映晶体结构的周期性,不能反映其对称性,所以在晶体学中,规定了选取单胞要满足以下几点原则(如图1-10所示):①要能充分反映整个空间点阵的周期性和对称性;②在满足①的基础上,单胞要具有尽可能多的直角;③在满足①、②的基础上,所选取单胞的体积要最小。
根据以上原则,所选出的14种布拉菲点阵的单胞(见图1-12)可以分为两大类。
一类为简单单胞,即只在平行六面体的 8个顶点上有结点,而每个顶点处的结点又分属于 8个相邻单胞,故一个简单单胞只含有一个结点。
另一类为复合单胞(或称复杂单胞),除在平行六面体顶点位置含有结点之外,尚在体心、面心、底心等位置上存在结点,整个单胞含有一个以上的结点。
14种布拉菲点阵中包括7个简单单胞,7个复合单胞。
图1-11 单晶胞及晶格常数根据单胞所反映出的对称性,可以选定合适的坐标系,一般以单胞中某一顶点为坐标原点,相交于原点的三个棱边为X、Y、Z三个坐标轴,定义X、Y轴之间夹角为γ,Y、Z之间夹角为α,Z、X轴之间夹角为β,如图1-11所示。

机械原理空间点阵机械原理机械原理是研究机械运动规律的一门学科,它是机械工程学的基础和核心。
机械原理主要研究物体在不同力的作用下所产生的运动规律及其应用。
1.力学基础力学是研究物体运动和变形规律的一门学科,它分为静力学和动力学两个部分。
静力学主要研究物体在平衡状态下所受的各种力的平衡条件,而动力学则研究物体在运动状态下受到各种外力所产生的加速度、速度和位移等变化规律。
2.机构设计机构设计是指将各种零部件按照一定的方式组合起来,形成一个具有特定功能的整体结构。
常见的机构包括齿轮传动、链条传动、曲柄连杆传动等。
这些机构都有其自身特点和适用范围,在实际应用中需要根据具体情况进行选择。
3.空间点阵空间点阵是指由多个点组成的三维结构,也可以看作是三维坐标系上离散化后得到的点集合。
空间点阵在机械设计中有广泛的应用,可以用来描述机构结构、零部件的位置和运动轨迹等。
4.运动学分析运动学分析是指研究物体在运动过程中各个部分之间的相对位置、速度和加速度等关系的一种方法。
在机械设计中,运动学分析可以帮助工程师确定机构结构、零部件的位置和运动轨迹等重要参数。
5.力学仿真力学仿真是指利用计算机模拟物体在不同力作用下的运动规律和变形情况的一种方法。
通过力学仿真,工程师可以快速准确地预测机械系统在不同工况下的性能表现,并进行优化设计。
6.材料力学材料力学是研究物质内部结构和性质对其受力行为影响的一门学科。
在机械设计中,材料力学可以帮助工程师选择合适的材料,确定其强度、刚度等参数,并进行结构优化设计。
7.热处理技术热处理技术是指通过加热和冷却等方式改变材料组织结构和性能的一种方法。
在机械设计中,热处理技术可以改善材料的强度、韧性和耐磨性等性能,提高机械系统的使用寿命和可靠性。
8.表面处理技术表面处理技术是指通过物理或化学方法改变材料表面性质的一种方法。
在机械设计中,表面处理技术可以提高零部件的耐腐蚀性、耐磨性和润滑性等重要参数,增强机械系统的使用寿命和可靠性。
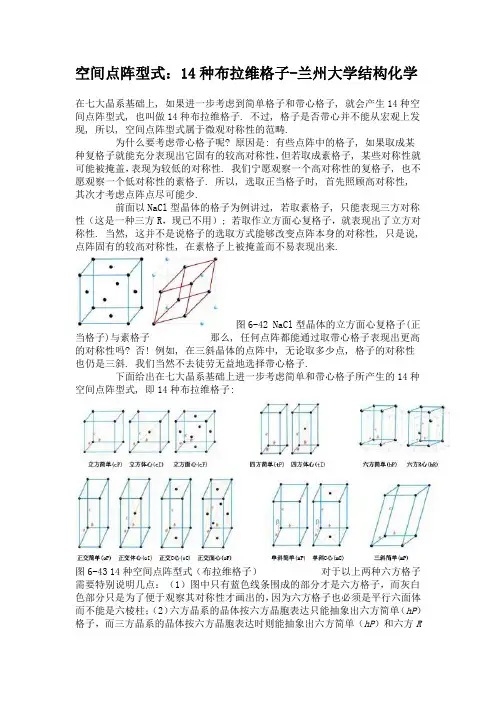
空间点阵型式:14种布拉维格子-兰州大学结构化学在七大晶系基础上, 如果进一步考虑到简单格子和带心格子, 就会产生14种空间点阵型式, 也叫做14种布拉维格子. 不过, 格子是否带心并不能从宏观上发现, 所以, 空间点阵型式属于微观对称性的范畴.为什么要考虑带心格子呢? 原因是: 有些点阵中的格子, 如果取成某种复格子就能充分表现出它固有的较高对称性,但若取成素格子, 某些对称性就可能被掩盖,表现为较低的对称性. 我们宁愿观察一个高对称性的复格子, 也不愿观察一个低对称性的素格子. 所以, 选取正当格子时, 首先照顾高对称性, 其次才考虑点阵点尽可能少.前面以NaCl型晶体的格子为例讲过, 若取素格子, 只能表现三方对称性(这是一种三方R,现已不用); 若取作立方面心复格子,就表现出了立方对称性. 当然, 这并不是说格子的选取方式能够改变点阵本身的对称性, 只是说, 点阵固有的较高对称性, 在素格子上被掩盖而不易表现出来.图6-42 NaCl型晶体的立方面心复格子(正当格子)与素格子那么, 任何点阵都能通过取带心格子表现出更高的对称性吗? 否! 例如, 在三斜晶体的点阵中, 无论取多少点, 格子的对称性也仍是三斜. 我们当然不去徒劳无益地选择带心格子.下面给出在七大晶系基础上进一步考虑简单和带心格子所产生的14种空间点阵型式, 即14种布拉维格子:图6-43 14种空间点阵型式(布拉维格子)对于以上两种六方格子需要特别说明几点:(1)图中只有蓝色线条围成的部分才是六方格子,而灰白色部分只是为了便于观察其对称性才画出的,因为六方格子也必须是平行六面体而不能是六棱柱;(2)六方晶系的晶体按六方晶胞表达只能抽象出六方简单(hP)格子,而三方晶系的晶体按六方晶胞表达时则能抽象出六方简单(hP)和六方R心(hR)两种格子,有时为了清楚起见,分别称之为“三方晶系的六方简单 (hP) 格子”和“三方晶系的六方R 心(hR) 格子”. 换言之,六方R心(hR)格子实际上只用于三方晶系,而六方简单 (hP)格子既用于六方晶系, 也用于三方晶系, 所以只算一种格子. (3)晶系是在实在的物理基础上划分的,所以,尽管三方晶系的两种格子——六方简单(hP)和六方R心(hR)的形状都与六方晶系的六方简单 (hP)格子相同(即hP是两个晶系共用的), 但真实的三方晶体中只有三次对称轴而没有六次对称轴, 只有六方晶体才有六次对称轴.你能否发明更多的“布拉维格子”?例如:四方面心、四方底心?立方底心?或除去立方面心上相对的两个面心?……下图(a)表明:所谓的四方C心其实应当是四方简单;图(b)表明:所谓的四方面心其实其实应当是四方体心;图(c)表明:立方F被除去相对两个面心后,不仅沿体对角线的4条三重对称轴不复存在,而且沿图中箭头平移时再不能复原,所以,它不但丧失了作为立方格子的资格,而且丧失了作为点阵的资格!图6-44 (a)假想的四方C心(b)假想的四方面心 (c)立方F失去相对两个面心6.4.6 32个晶体学点群分子的对称操作的集合构成分子点群. 同理,晶体的宏观对称操作也是点操作,所有宏观对称元素也会通过一个公共交点按一切可能组合起来,产生晶体学点群. 不过,既然晶体中的宏观对称元素只有8种,晶体学点群数目也必然受到限制. 可以证明晶体学点群只有32种.晶体学点群可以用所谓的熊夫利(Schonflies)符号表示,也可以用国际符号表示,还有一种称之为“极射赤面投影图”的图形表示法. Schonflies符号由德国结晶学家Schonflies创造,我们在分子点群中已经用过,不过,由于轴次定理的限制,晶体学点群的Schonflies符号不会出现C5v、D5h等符号. 国际符号是尚未见过的新符号,需要作一简要介绍.晶体学点群的国际符号一般由三个位构成,每个位代表与特征对称元素取向有一定联系的方向. 所以, 任何一位代表的方向随晶系不同而可能不同.右表列出七种晶系中国际符号的三个位的方向.平行于某个方向的对称轴和/或垂直于该方向的对称面就标记在相应的位上. 表6-5 国际符号三个位的方向 例如,立方晶系的三个位依次为a 、a +b +c 、a +b ,由矢量加法可知, 它们分别是正方体的棱、体对角线、面对角线方向. 将各方向上的对称元素依次标记在相应的位上, 就是某个点群的国际符号. 例如, 立方晶系的点群共有五个,用Schonflies 符号分别标记为T, T h ,O, T d , O h , 国际符号是: 尽管立方晶系的国际符号规定了三个位, 但23和m3点群属于四面体群,a +b 位上 没有对称元素,故只列出前两个位的对称元素.晶体学点群命名示意: NaCl 型晶体NaCl 型晶体的晶体点群与正方体的对称性相同, 为m3m (Schonflies 符号为O h ). 不妨先观察一下正方体,可以看出: (1)垂直于a 的方向有镜面; (2)平行于体对角线方向有3次对称轴; (3)垂直于面对角线方向有镜面. NaCl 型晶体在相应的方向上也有这些对称性,所以,晶体点群的国际符号为m3m (Schonflies 符号为Oh ). 可能有读者问:这些方向上还有别的对称元素,为什么只标记这样少数几个呢?这正是国际符号的奥妙之处, 它要尽可能紧凑,同一方向上不止一种对称元素时,按一定规则选取最必要者标出. 图6-45 NaCl 型晶体的晶体点群与正方体的对称性相同,为m3m (Oh ) 事实上,国际符号又分为简略符号与完全符号. 例如,m3m 是简略符号, 是完全符号,但这简略符号已经包含了所有最必要 的对称元素,如果需要的话,由这些对称元素出发,根据群论的组合原理就能导出点群中所有的对称元素. 因此,很少使用完全符号. 而且,即使完全符号也并不列出点群中所有的对称元素.现在,读者一定也明白为什么分子点群只用Schonflies 符号,而不用国际符号的原因了吧?分子中没有晶轴的概念,国际符号的“位”对于分子根本没有意义.应当特别注意:晶体的点群是针对真实的晶体而言, 而不能仅仅针对只具有抽象几何意义的空间点阵和布拉维格子来划分. 晶体只有七个晶系, 却有32个点群, 所以, 必然会有多个点群属于同一个晶系的现象. 例如, 属于立方晶系的点群共有五个,用Schonflies 符号分别标记记为T, Th, O, Td , Oh , 国际符号分别是抽象的空间点阵和布拉维格子的格点上没有放上真实的结构基元. 所以, 如果仅从布拉维格子看, 任一种晶系的布拉维格子都有该晶系的最高对称性, 即属于该晶系的全点群, 立方晶系的全点群就是Oh; 但真实晶体却必须在格点上放上结构基元, 于是, 对称性就可能从全点群下降(至多保持不变), 这样一来, 任一种晶系的真实晶体的对称性就未必能继续保持在该晶系的全点群, 也许只能属于该晶系对称性较低的点群, 称为偏点群. 任何晶系的偏点群都是其全点群的子群.许多初学者有这样一个常见问题: 为什么将立方晶系的特征对称元素规定为沿正方体四条体对角线的3, 而不是穿过正方体相对面心的三条4? 4的对称性不是更高吗? 难道属于立方晶系的晶体还不都具有三条4?事实是, 属于立方晶系的晶体确实不一定都具有三条4 !例如, NaCl 型晶体属于Oh点群, 它既有三条4 , 也有四条3 ; 而立方ZnS型晶体则不然, 它属于Td点群, 具有四条3,却没有三条4 . 这两类晶体共有的对称元素是四条3, 也就是立方晶系的特征对称元素.晶体学点群还有一种图形表示法, 称为极射赤面投影图. 其基本思想是利用立体仪把球面上的点投影到赤道平面上, 化立体为平面.先模仿地球仪按如下步骤造一个立体仪:1. 取一个单位圆球作为投影球S; 2.取赤道平面作为投影面Q, 与S交成投影圆; 3. 以垂直于Q并通过球心O的极轴作为投影轴, 两端分别为北极N和南极S.表6-6 32个晶体学点群图6-46 NaCl型与立方ZnS型晶体图6-47 立体仪用极射赤面投影图描述晶体学点群时, 通常对每个点群画出两个投影图. 以 m3m为例, 下图(a)表示晶体对称元素的投影,图(b)表示球上一组点的投影图, 这组点是从某一个普通的点开始, 利用所有对称操作复制出来的, 也反映点群对称性. 有的文献将这两种图合并在一起, 如图(c):我们以晶体对称元素为例, 简要介绍立体仪投影法.首先, 将晶体对称元素系的公共交点置于投影球心O, 从球心向各晶面引垂线(即晶面法线)并交于投影球, 在球面上形成一组点的分布. 由于这些晶面法线是晶体的各种对称轴, 所以, 这组点就构成了晶体对称轴的球面投影. 类似地, 晶体的对称面也可延伸至投影球, 与球面相交成圆. 所以, 除了对称中心处于球心, 不会在投影球面上形成点以外, 晶体的各种对称轴和对称面都可以在投影球上形成球面投影.图6-48 m3m的极射赤面投影图在此基础上, 利用立体仪投影法,把球面上的点进一步投影到赤道平面上: 设北半球球面上有一个点P,过P点向南极连线成PS,与赤道平面交于P’点, 就在P’处画一个点; 反之, 若南半球球面上有一点R,过R点向北极连线成RN,与赤道平面交于R’点, 就在R’处画一个空心圆圈, 以区别于北半球球面上点的投影(图中未画出):晶体对称面在投影球面上相交成圆, 而圆又可以被看作无数点的集合. 既然球面上每个点都能产生赤面投影, 对称面当然也能表示在极射赤面投影图上.关于极射赤面投影更详细的介绍, 可以参考晶体学的有关书籍.图6-49 极射赤面投影原理。
空间点阵和晶体结构的关系
空间点阵和晶体结构有密切的关系。
晶体是由原子、离子或分子按一定的空间排列方式而构成的,而空间点阵则是描述这种排列方式的数学模型。
晶体的结构可以用空间点阵来描述,而空间点阵则可以通过晶体的结构来确定。
晶体的结构和性质都由空间点阵所定义的对称性质决定,因此空间点阵就成为了研究晶体结构和性质的基础。
晶体的结构可以通过对其晶胞的切割和重组来构建出空间点阵。
空间点阵包括了晶体中所有原子、离子或分子所在的位置,以及它们之间的相对位置信息。
总之,空间点阵和晶体结构之间的关系是不可分割的。
晶体结构可以描述空间点阵,而空间点阵也可以确定晶体的结构。
了解空间点阵与晶体结构的关系对于深入理解材料的结构和性质具有重要意义。