西门子工业以太网通讯网络仿真
- 格式:docx
- 大小:10.15 KB
- 文档页数:2

西門子PLC的以太網通訊及OPC通訊介紹1.以太網通訊CAL有很多地方用到以太網通訊,L2,焊機與PLC間通訊等,表檢的成像原理為:在金屬板帶表面沒有缺陷時,反射的光在明視場下很強,而在暗視場的散射光很弱;如有缺陷,則明視場的光強減弱,而暗視場的光強增加。
根據這個原理,通過檢測攝像頭裡光強的變化,可檢測出材料表面上的一些物理缺陷。
CAL 僅僅用到了它的檢測破孔這一個功能。
下面再來看西門子的以太網通訊,使用以太網通訊處理器可能的連接方式:我們可以看到不同的通訊方式在PLC裏面需要調用不同的功能塊。
像S7-Connection方式連接的,需要調用SFB12/FB12等來讀取發送數據息,而TCP等連接的,需要FC5等來讀取發送數據。
下面簡單介紹下每種連接特點:Send/receive: iso 連接:ISO傳輸服務通過組態連接提供SEND/REVEICE interface服務在以太網上傳輸數據,此時服務使用的是ISO協議。
此通訊速度較快,可是不能實現網絡路由,只能用於局域網通訊。
Send/receive: iso-On-TCP 連接:突破了局域網的限制,可以路由到公網上去;數據重發功能和基於第2層的CRC校驗保證了數據傳輸的完整性和可靠性。
Send/receive: TCP 連接:TCP/IP提供面向連接的數據通訊,數據並不會被打包因而並沒有數據包確認位,在這TCP服務提供了統一的sccket接口到每一個終端,因而數據塊可以整體發送,這裡區別於iso-On-TCP 連接。
Send/receive: UDP連接:UDP提供簡單數據傳輸,無需確認,與TCP同屬第4層協議。
與TCP相比,UDP屬於無連接的協議,數據報文無需確認。
S7通信:S7協議是西門子S7家族的標準通信協議,使用S7應用接口的通信不依賴特定的總線系統(Ethernet,PROFIBUS,MPI)。
接口位於ISO-OSI參考模型的第7層,下面圖模型各層的通信方式。

一、MPI网的仿真1、 PC/PG端口选择:STEP7选PLCSIM(MPI),WINCC选MPI(Wincc)――>PLCSIM(MPI)。
2、先在STEP7V5·4软件编好控制程序。
3、打开S7-PLCSIMV5·4软件,在出来的窗口中勾下面的那个选项,点第二个选项,选择打开STEP7V5·4程序的项目。
4、下载程序并运行。
5、打开WINCC V6.0并新建项目,在变量管理添加新的驱动程序,选····S7···的,然后在MPI新建连接,在MPI上点击右键――>系统参数――>单元――>在逻辑设备项选择“PLCSIM(MPI)”。
6、新建变量并编辑画面,然后保存运行。
二、 TCP/IP网的仿真1、 PC/PG端口选择:STEP7选PLCSIM(RFC 1006),WINCC选CP_I2_1:――>PLCSIM(RFC 1006)。
2、先在STEP7V5·4软件组态硬件(要有CP343-1并填入IP地址)并编好控制程序。
3、打开S7-PLCSIMV5·4软件,在出来的窗口中勾下面的那个选项,点第二个选项,选择打开STEP7V5·4程序的项目。
4、下载程序并运行。
5、打开WINCC V6.0并新建项目,在变量管理添加新的驱动程序,选····S7···的,然后在TCP/IP新建连接(记得填入STEP7组态时的IP地址),更改插槽号为2。
在TCP/IP上点击右键――>系统参数――>单元――>在逻辑设备项选择“CP_I2_1:”。
6、新建变量并编辑画面,然后保存运行。
三、PROFIBUS网的仿真1、 PG/PC接口选择:STEP7选择S7ONINE(STEP7)――>PLCSIM(PROFIBUS),WINCC选CP_I2_1:――>PLCSIM(PROFIBUS)。
西门子杯全国大学生过程控制仿真挑战赛设计方案第I页西门子杯全国大学生过程控制仿真挑战赛设计方案第I页西门子杯全国大学生过程控制仿真挑战赛1 被控对象工艺流程概述............................................................................ .. (1)2 系统设计............................................................................ .. (3)2.1 DCS系统概述............................................................................ (3)2.2 系统软件安装设置............................................................................ .. (3)2.3 硬件结构及网络层次............................................................................ . (4)3 控制方案设计............................................................................ (6)3.1 进料流量控制方案............................................................................ .. (6)3.1.1 比值控制系统特点............................................................................ .. (6)3.1.2 比值控制系统主动量的选择............................................................................ .63.1.2 进料流量的变比值控制方案............................................................................ .63.1.4 控制器规律的选择............................................................................ .. (9)3.1.5 比值控制系统中控制器正、反作用的选择 (9)3.2 反应器料位控制方案............................................................................ .. (10)3.2.1 串级控制系统的特点............................................................................ .. (10)3.2.2 反应器料位串级控制系统............................................................................ (10)3.2.3 串级控制系统中主、副控制器规律的选择 (11)3.2.4 串级控制系统中主、副控制器正、反作用的选择 (12)3.3 反应温度及升温速率控制方案............................................................................ .123.3.1 模糊分程控制方案............................................................................ (12)3.3.2 模糊控制系统的参数设计............................................................................ (15)3.3.4 具有压力补偿的反应釜温度控制 (15)3.4 反应器压力安全控制及联锁保护 (17)3.5 反应器组分控制............................................................................ . (18)3.6 开车步骤顺序控制............................................................................ (19)4 结论............................................................................ . (21)附录............................................................................ .. (22)基于PCS7的带搅拌釜式反应器系统的控制方案的带搅拌釜式反应器系统的控制方案1 被控对象工艺流程概述被控对象工艺流程概述所选被控对象为过程工业常见的带搅拌釜式反应器(CSTR)系统,属于连续反应过程。
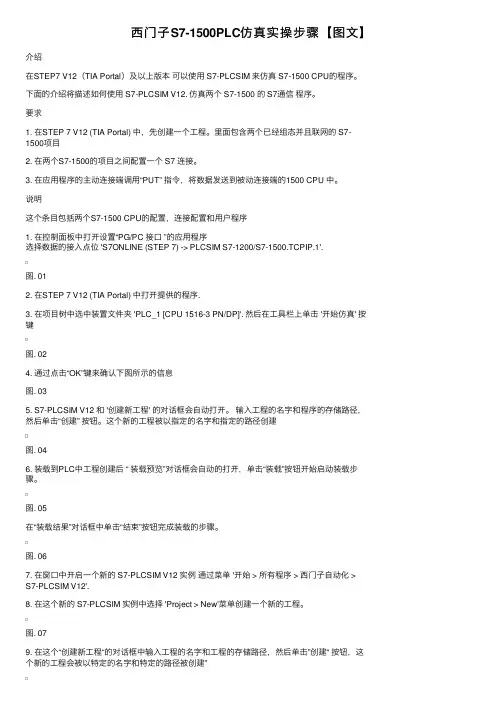
西门⼦S7-1500PLC仿真实操步骤【图⽂】介绍在STEP7 V12(TIA Portal)及以上版本可以使⽤ S7-PLCSIM 来仿真 S7-1500 CPU的程序。
下⾯的介绍将描述如何使⽤ S7-PLCSIM V12. 仿真两个 S7-1500 的 S7通信程序。
要求1. 在STEP 7 V12 (TIA Portal) 中,先创建⼀个⼯程。
⾥⾯包含两个已经组态并且联⽹的 S7-1500项⽬2. 在两个S7-1500的项⽬之间配置⼀个 S7 连接。
3. 在应⽤程序的主动连接端调⽤“PUT” 指令,将数据发送到被动连接端的1500 CPU 中。
说明这个条⽬包括两个S7-1500 CPU的配置,连接配置和⽤户程序1. 在控制⾯板中打开设置“PG/PC 接⼝ ”的应⽤程序选择数据的接⼊点位 'S7ONLINE (STEP 7) -> PLCSIM S7-1200/S7-1500.TCPIP.1'.图. 012. 在STEP 7 V12 (TIA Portal) 中打开提供的程序.3. 在项⽬树中选中装置⽂件夹 'PLC_1 [CPU 1516-3 PN/DP]'. 然后在⼯具栏上单击 '开始仿真' 按键图. 024. 通过点击“OK”键来确认下图所⽰的信息图. 035. S7-PLCSIM V12 和 '创建新⼯程' 的对话框会⾃动打开。
输⼊⼯程的名字和程序的存储路径,然后单击“创建” 按钮。
这个新的⼯程被以指定的名字和指定的路径创建图. 046. 装载到PLC中⼯程创建后 “ 装载预览”对话框会⾃动的打开,单击“装载”按钮开始启动装载步骤。
图. 05在“装载结果”对话框中单击“结束”按钮完成装载的步骤。
图. 067. 在窗⼝中开启⼀个新的 S7-PLCSIM V12 实例通过菜单 '开始 > 所有程序 > 西门⼦⾃动化 >S7-PLCSIM V12'.8. 在这个新的 S7-PLCSIM 实例中选择 'Project > New'菜单创建⼀个新的⼯程。
基于西门子S7-1200 Modbus TCP与机器人通信作者:***来源:《内燃机与配件》2020年第01期摘要:Modbus-TCP是运行在TCP/IP上的Modbus传输协议。
通过此协议,控制器相互之间或控制器经由网络(如以太网)可以和其它设备之间进行通信。
应用Modbus-TCP构建的工业以太网络具有组网简单,通信高效、稳定的特点,因而在工业工程中得到了较多的应用。
该文以Modebus-TCP通信在全国工业机器人技术大赛中的具体应用为例,详细阐述了西门子S7-1200 Modebus-TCP在TIA Portal V13中创建PLC与汇博机器人通信的使用方法。
关键词:Modbus-TCP;PLC;机器人;通信0 ;引言Modbus-TCP是运行在TCP/IP上的Modbus传输协议。
通过此协议,控制器相互之间、或控制器经由网络(如以太网)可以和其它设备之间进行通信。
应用Modbus-TCP构建的工业以太网络具有组网简单,通信高效、稳定的特点,因而在工业工程中得到了较多的应用。
该文以Modebus-TCP通信在全国工业机器人技术大赛中的具体应用为例,详细阐述了Modebus-TCP 在TIA Portal V13中创建PLC与机器人通信的使用方法。
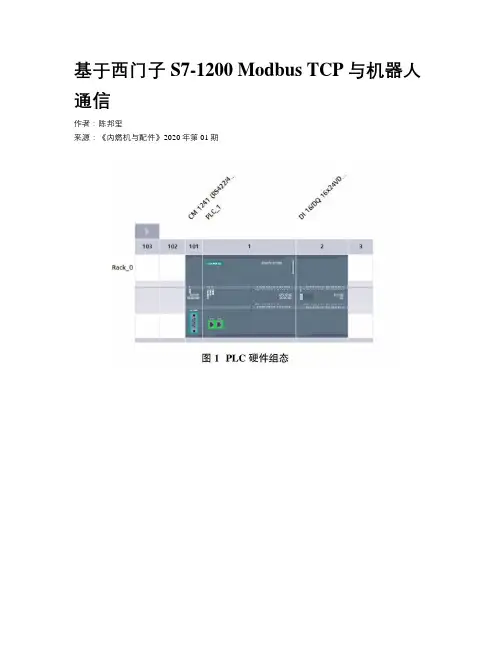
1 ;硬件组态打开TIA Portal V13软件,创建新项目,项目命名为“Communication”,更改保存位置(自定),点击【创建】。
新项目创建成功后,对硬件进行组态。
1.1 添加PLC控制器在【项目樹】、【设备】、【Communication】下双击【添加新设备】,出现添加新设备对话框,点击对话框左侧【控制器】。
在控制器选择框里,依次选择SIMATIC S7-1200,CPU 1215C DC/DC/DC,6ES7 215-1 AG40-0XB0。
在对话框右侧【设备】下,版本选择V4.0。
点击【确定】。
在PLC属性里设置PLC以太网网址:192.168.8.101。
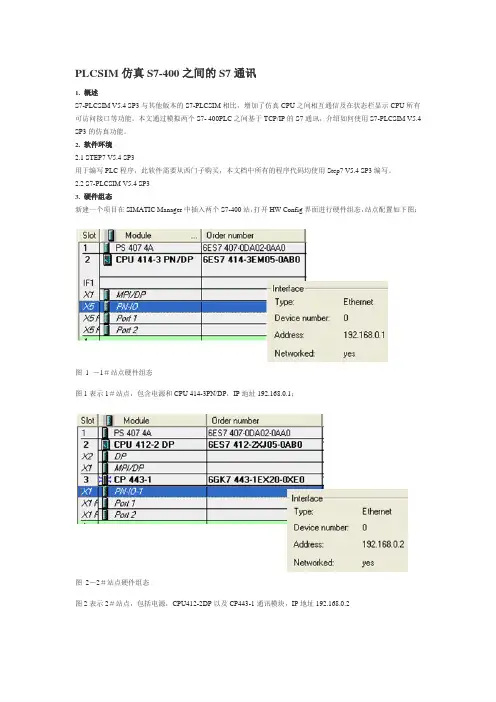
PLCSIM仿真S7-400之间的S7通讯1. 概述S7-PLCSIM V5.4 SP3与其他版本的S7-PLCSIM相比,增加了仿真CPU之间相互通信及在状态栏显示CPU所有可访问接口等功能。
本文通过模拟两个S7- 400PLC之间基于TCP/IP的S7通讯,介绍如何使用S7-PLCSIM V5.4 SP3的仿真功能。
2. 软件环境2.1 STEP7 V5.4 SP3用于编写PLC程序,此软件需要从西门子购买,本文档中所有的程序代码均使用Step7 V5.4 SP3编写。
2.2 S7-PLCSIM V5.4 SP33. 硬件组态新建一个项目在SIMATIC Manager中插入两个S7-400站,打开HW Config界面进行硬件组态,站点配置如下图:图 1 -1#站点硬件组态图1表示1#站点,包含电源和CPU 414-3PN/DP,IP地址192.168.0.1;图2-2#站点硬件组态图2表示2#站点,包括电源,CPU412-2DP以及CP443-1通讯模块,IP地址192.168.0.24. 网络组态打开Netpro可以看到如图3所示的网络结构图图3-网络结构图建立两个站点之间的S7连接,单击CPU414-3PN/DP,单击鼠标右键,选择“Insert New Connection”,如图4图4-插入新连接在“Insert New Connection”对话框选择通讯方CPU(Partner),选择连接类型S7 connection(默认选择),如图5图5-设置连接类型及通讯对象点击“OK”按钮进入“S7 connection ”属性对话框设置如图6,在连接路径“Connection Path”中可以看到通讯双方CPU及通讯接口地址。
图6-设置通讯接口点击“OK”按钮,在网络结构图下方列表中生成S7连接如图7,编译保存完成网络组态。
图7-完成配置S7连接5. STEP7编程S7-400使用标准库系统功能块中的SFB8/9/12/13/14/15,具体信息可参考《用于S7-300/400系统和标准功能的系统软件》1214574本例程在414-3PN/DP的OB1中调用SFB12,412-2DP的OB1中调用SFB13实现两个PLC之间的S7通讯,通讯长度10个字节,如图8。
目录1概述 (3)2配置步骤 (3)1概述在开放的、不同种类的西门子通讯系统内,工业以太网是用于管理和单元级的网络。
从物理结构上说,工业以太网是一个使用双绞线的电气网络,或者是一个使用光纤电缆的光学网络。
在工厂或者设备间可以使用TCP通信进行非实时的数据交换,本文以S7-1500和SIMOTION为例进行TCP通信的介绍和配置的步骤说明。
2配置步骤软件安装过程如表1所示表1.序号说明通信说明如下:SIMOTION S7-1500说明192.168.214.1192.168.214.10各自的IP地址,在同一网段并且不冲突20002200端口号客户机服务器TCP通信时,需要设置一个为客户机一个为服务器10bytes收发10bytes收发数据长度2.首先建立一个SIMOTION的项目:3.插入一个SIMOTION D435:弹出硬件组态界面后保存编译并关闭。
4.导入通信使用的LCOM库(/WW/view/cn/48955385),如下图所示,在LIBRARIES上点击右键,选择Import folders/objects:5.浏览并且导入LCOM库:6.点击右键并且选择接受并且编译7.编写如下程序:INTERFACE//------------- import ---------------------------------------------------------USELIB LCom;//------------- global device variables ----------------------------------------VAR_GLOBALgab8SendBuffer: ARRAY[0..LCOM_SEND_DATA_LENGTH-1] OF BYTE;gab8ReceiveBuffer : ARRAY[0..LCOM_RECEIVED_DATA_LENGTH-1] OF BYTE;FBCom: fbLComMachineCom; //instance of FBEND_VAR//------------- export ---------------------------------------------------------PROGRAM pComBackground;//------------------------------------------------------------------------------END_INTERFACEIMPLEMENTATION//------------------------------------------------------------------------------PROGRAM pComBackgroundVARsComParameter: sLComParameterType; //parameter for FBboFirstCycle: BOOL := TRUE;boEnable: BOOL := TRUE; //run directboCommunicate: BOOL := TRUE; //run directu16SendDataLength : UINT := 10;boConnected: BOOL;boError: BOOL;b32ErrorId: DWORD;boDataReceived: BOOL;boSenderActive: BOOL;boReceiverActive : BOOL;u16ReceivedLength : UINT;END_VARIF boFirstCycle THEN //Initialization in first cycle//connection configurationsComParameter.sCfgConnection.boWithLComProtocol := FALSE;sComParameter.sCfgConnection.boAcceptUnknownPartner := TRUE;sComParameter.sCfgConnection.u16ComService:= 1; //1 = TCPsComParameter.sCfgConnection.boIsTcpClient:= TRUE; //is clientsComParameter.sCfgConnection.u16LocalPort:= 2000;sComParameter.sCfgConnection.au8RemoteAddress[0] := 192;sComParameter.sCfgConnection.au8RemoteAddress[1] := 168;sComParameter.sCfgConnection.au8RemoteAddress[2] := 214;sComParameter.sCfgConnection.au8RemoteAddress[3] := 10 ;sComParameter.sCfgConnection.u16RemotePort:= 2200;sComParameter.sCfgConnection.u16LifeSignCycle:= 300; //ms//sender parametersComParameter.sCfgSender.u8ComMode:= 1; //2: Mode on_changesComParameter.sCfgSender.u16CycleTime:= 1000; //mssComParameter.sCfgSender.u16AckTimeout := 500; //mssComParameter.sCfgSender.u8SlidingWindow := 1;//receiver parametersComParameter.sCfgReceiver.u8ComMode:= 1;sComParameter.sCfgReceiver.u16CycleTime := 1000;sComParameter.sCfgReceiver.u16AckTimeout := 500;sComParameter.sCfgReceiver.u8SlidingWindow := 1;//time synchronization parametersComParameter.sCfgTimeSync.boUseReceivedTimeStamps := FALSE;sComParameter.sCfgTimeSync.u8SendModeTimeSync:= 0;sComParameter.sCfgTimeSync.u16TimeSyncCycleTime := 0;sComParameter.sCfgTimeSync.todTimeSyncAtTime:= TOD#00:00:00.0;//reset after first cycleboFirstCycle := FALSE;ELSE//call communication function blockFBCom(enable:= boEnable,communicate:= boCommunicate,sendDataLength:= u16SendDataLength,sendData:= gab8SendBuffer,receivedData:= gab8ReceiveBuffer,parameter:= sComParameter,connected=> boConnected,dataReceived=> boDataReceived,error=> boError,errorId=> b32ErrorId,senderActive=> boSenderActive,receiverActive=> boReceiverActive,receivedDataLength => u16ReceivedLength);END_IF;END_PROGRAMEND_IMPLEMENTATION8.分配程序到执行组,并且下载程序,运行SIMOTION:9.打开博途软件,创建一个新项目:10.插入一个PLC ,本例使用1516CPU:11.设置IP地址并且创建网络连接如下图所示:12.创建TCP通信连接,选择”Connections”,并且选择TCP connection,需要注意,在建立连接的时候首先鼠标左键点击端口,显示出一条虚线后,再点击回此端口,即可建立连接:创建好的连接如下图所示:13.点击此连接的属性,并且填写连接的信息,如下图所示:14.编写程序如下图所示:使用如下指令:在OB1中编写如下程序:15.关于ID参数的说明,此参数可以在连接的Local ID属性中获取:16.从SIMOTION发送到PLC:PLC的watch table:17.从PLC到SIMOTION:SIMOTION观察到的接收数据:。
工业以太网通讯疑难杂症之三:自制长距离的M12接头转RJ45接头以太网线转载▼标签:分类:现场总线与工业以太网连接器笔记本电脑链路之三profinet完全按照针脚定义自制的工业以太网通讯线,用万用表测量两头导通没问题,结果用到现场死活通讯不上,TP灯慢速闪烁,这是为什么呢?是交换机端口功率不够么?很显然不是,这次连直接用PC上的端口都扫描不到现场的以太网设备!已经入夜很久,客户坚称网线是没问题的,难道就这么通宵耗下去?当然不是,直接把一根短的(约1米)一端M12一端RJ45的网线插到现场设备网口上,用笔记本电脑网口来PING现场设备,我们就立即扫描到该现场以太网设备。
因此,我们还是好好来看看这条网线是怎么回事,既然针脚定义与实际接线都没问题,那么这个问题应该集中在网线电缆上!这是一条什么网线呢?工业级的,8芯,约100米。
肯定是网线太长的原因,但是生产线布局都定死了,缩短接线距离是不现实的,怎么办?8芯?嗯嗯,问题就在这里了!我们知道西门子提供的标准PROFINET网线,在RJ45水晶头里是只用4个针脚的,而第4、5、7、8号针脚干脆就不接线。
现场客户自制的一端M12一端RJ45网线,RJ45水晶头里的8个针脚都接着线,但这又有什么关系呢?不管怎样,我们先把RJ45水晶头里第4、5、7、8号针脚上的网线线缆全部剥离再试试,结果TP灯马上就激活了,有戏!接下来对每个RJ45水晶头4、5、7、8号脚做这样的处理,之后很快就完成了PROFINET通讯组态,并使整个PROFINET网络通讯成功运行起来。
现在我们知道了,长距离8芯网线里,带电的4、5、7、8号线缆对于1、3、2、6号线缆的确是有干扰的,这到底是为什么呢?当然,我们可以用笼统的线路损耗的原理来解释这个现象,但是我总感觉缺少什么。
如果一条8根芯都带电的网线,长达100米,那么在布线期间,网线内部的这8根芯很可能发生轻微内部互相缠绕。
线圈,就是线缆缠绕的极端情况,线圈形成了电感,轻微的缠绕,就是轻微的电感,我们可以称之为通讯电缆中的内部寄生电感,电感是一种储能元件,虽然储存的是无功功率,但是根据功率三角形,它增加了视在功率的消耗,其实就是吸收了交换机端口的功率与能量,导致端口功率跟不上消耗,导致网络链路建立失败。
如何实现WinCC和SIMOTION的工业以太网通信1 简介在WinCC V7.0 SP2及以前版本中,未提供专用的驱动程序和SIMOTION通信,可以通过SIMATIC NET建立SIMOTION的OPC服务器,WinCC作为OPC客户机和SIMOTION通信,具体实现方法可以参考下载中心文档《SIMOTION与OPC的通讯》。
从WinCC V7.0 SP3开始,提供了专用的SIMOTION驱动程序,可以通过工业以太网(TCP/IP协议)和SIMOTION通信。
SIMOTION驱动程序包含在WinCC基本系统当中,无需单独购买。
WinCC和SIMOTION SCOUT无需集成,即部署WinCC的操作员站和组态SIMOTION的PG/PC无关。
本例中所使用的硬件和软件环境如下:(A) SIMOTIONSIMOTION D410_PN (6AV1 410-0AB00-0AA0, Firmware V4.2)(B) SIMOTION组态PG/PCIPC 547C (6AG4 104-1DR21-3CC5), CP1623 (6GK1 162-3AA0)STEP7 Professional 2010 SR2 (STEP7 V5.5 SP2), SIMOTION SCOUT V4.2 SP1(C) WinCC操作员站DELL OPTIPLEX GX620,Broadcom NetXtreme 57xx Gigabit ControllerWinCC V7.0 SP3 Asia2 组态SIMOTION通过以太网将SIMOTION D410_PN 连接到组态PC。
2.1 创建SIMOTION项目(A) 打开SIMOTION创建新项目,在Accessible nodes中在线浏览设备,以确定设备的型号和版本,如图1所示。
图1(B) 在项目中插入相应的设备,本例中为SIMOTION D410_PN V4.2,如图2所示。
西门子SMIATIC-S7控制系统智能以太网通信处理器SCANET-S7用户手册SCANET_UM_CN2016071.前言工业网络通讯技术是制造业实现工业4.0的基础。
在国务院印发的《中国制造2025》发展规划中已经明确了加快推动新一代信息技术与制造技术的融合发展。
当前,各级政府部门也正在大力推动两化融合(信息化和工业化的高层次深度结合),许多传统制造业的龙头企业都在积极构建智能生产信息化系统和工业大数据分析,通过信息化改造来提升生产管理水平和产品质量,可以说我国的制造业当前正在经历一个脱胎换骨的发展。
工业制造业的数据基本上由两类构成,一是人工产生的数据,二是机器自动产生的数据。
在智能生产环节,我们将更多的关注机器自动产生的数据,因此构建生产信息化系统就离不开设备联网和数据采集。
西门子SIMATIC自动化控制系统在工业控制市场应用相当广泛,凭借其安全可靠性、全集成产品线和优异的功能获得了国内外制造业用户的高度评价,在过去的20年自动化高速发展期,每年都有近百万台的SIMATIC设备应用到各行各业的制造业生产车间。
但是我们考虑将这些设备接入信息化系统时将面临几个现实的问题:1.这些控制系统在构建初期并没有考虑到现在的信息化联网需求,因此绝大多数系统并没有集成工业以太网通讯接口,要实现数据采集就需要在现有控制系统上增加额外的以太网通讯接口。
2.采用西门子的以太网通讯接口模块是一种解决方案,但问题在于在硬件和软件上都需要重新去配置控制系统,也就是说需要设备制造商来完成这些工作,仅仅靠设备使用厂家是很难去完成的。
如果设备制造商因各种原因无法提供服务,那么就更加难以实现了。
3.对于信息化软件公司来说,西门子的解决方案(以太网通讯接口模块及其数据采集软件)也有一些其他的不足,譬如价格较高,支持设备的连接数不够,另外在支持ModbusTCP等开放以太网协议以及快速实施成百上千台设备数据采集时也不是很方便。
为了解决这个现实的问题,凌顶科技研发了SCANET系列产品,目标是为西门子SIMATIC自动化控制系统的以太网信息化数据采集提供一个统一的平台;这个平台包括一系列的硬件产品和丰富的软件支撑,功能包括基本的STEP7编程调试、以太网数据通讯、Modbus主从站通讯、第三方数据交换、远程数据订阅和远程设备维护;应用于以太网方式的控制系统编程调试、现场设备监控、局域网设备信息化数据采集和基于云端的设备远程维护和信息化管理系统。
西门子plc网口通讯设置西门子PLC是一种常见的工业自动化设备,而网口通讯设置是使用PLC进行网络通讯的关键步骤之一。
在现代工业中,PLC通过网络通讯实现设备之间的数据交换和控制指令传递,进一步提高了生产效率和自动化程度。
本文将探讨西门子PLC网口通讯设置的基本原理和操作步骤。
首先,我们需要了解一些基本概念。
PLC通讯主要分为串口通讯和网口通讯两种模式,而本文主要关注的是网口通讯。
网口通讯是基于以太网协议的数据传输方式,可以通过网络连接多个PLC设备,并进行数据交互和远程控制。
在网口通讯中,每个PLC设备都有一个IP地址,通过这个IP地址可以找到并连接到对应的PLC设备。
网口通讯设置的第一步是配置PLC设备的网络参数。
在西门子PLC设备中,网口通讯的设置一般包括IP地址、子网掩码、网关地址等参数。
IP地址是PLC设备在局域网中的唯一标识,通过IP地址可以实现设备之间的寻址和连接。
子网掩码用于划分局域网的子网,而网关地址则是连接到其他网络的出口。
正确配置这些网络参数是网口通讯的前提条件,也是确保设备正确通讯的基础。
配置网络参数后,接下来需要设置PLC设备的通信协议。
通信协议决定了设备之间数据交互的规则和格式,常见的协议有TCP/IP、UDP/IP等。
在西门子PLC设备中,一般使用S7协议进行网口通讯。
S7协议是一种专门为PLC设备设计的协议,具有高效稳定的特点。
通过设置通信协议,可以确保不同品牌、不同型号的PLC设备之间能够正常通讯,并进行数据交换。
除了配置网络参数和通信协议,还需要进行PLC设备的访问权限设置。
访问权限设置可以限制特定用户或设备对PLC设备的访问和操作。
在工业控制系统中,安全是至关重要的,通过设置访问权限,可以防止未经授权的用户对PLC设备进行非法访问和操作。
同时,合理设置访问权限还可以确保系统稳定运行,防止错误操作对设备造成损坏。
在进行网口通讯设置的过程中,还需要注意一些常见问题和解决方法。
基于以太网西门子S7系列PLC与PC之间的通讯作者:刘朋元解飞来源:《消费电子·理论版》2013年第12期摘要:随着工业的不断发展,业务需求的不断增加,将现有的PLC系统结合到信息化建设中将成为一种趋势。
本文针对西门子PLC的S7系列模块进行了深入研究,通过软件工程技术、西门子工控技术等,最终实现了PC与PLC S7系列之间的数据通讯。
关键词:西门子PLC;信息化建设;工控技术;数据通讯中图分类号:TP273.5 文献标识码:A 文章编号:1674-7712 (2013) 24-0000-02德国西门子公司生产的PLC凭借着体积小、标准化、稳定性高等特点,在我国的煤炭、冶金、化工等行业中得到了广泛应用。
特别是近年来PCL向大型网络化方向发展,已经渗透到钢铁、化工、电力等各个行业中。
另一方面,随着工业水平的不断发展,通过PC机与PLC 进行通讯的业务需求在逐渐增加。
虽然在一些小型集散控制系统中,利用专业的工控组态软件,如WINCC、INTOUCH等,制作上位机的监控界面,然后安装专用的PLC通讯接口模块以及其厂家推荐的DDE Server作为联系PC和PLC的桥梁,可以实现PC机与PLC之间的通讯,但此种方法成本较高、投资较大。
因此,如何低成本、高效率的实现PC机与PLC之间的数据通讯,将成为研究的重点。
一、基本思想目前,西门子S7系列和PC机通讯的方式主要有串口通讯和以太网通讯两种。
利用串口通讯,需要重新编写PLC内部的程序,PC上也需要编写与该PLC相对应的程序,此过程较为复杂。
利用以太网通讯有两种方法:建立OPC服务器实现PC机与PLC通讯;利用FETCH/WRITE方式实现PLC和PC机之间通讯。
在现代工业领域中,虽然串口通讯还被广泛应用,但是对于时效性要求较高、数据量传输较大、网络环境比较复杂的情况下,利用串口通讯来获取PLC的内部信息往往无法满足需求。
因此应用兼容性更强、传输效率更高的以太网通讯更为合理。
西门子工业以太网通讯网络仿真
1 序言工业以太网提供了针对制造业控制网络的数据传输的以太网标准。
该技术基于工业标准,利用了交换以太网结构,有很高的网络安全性、可操作
性和实效性,最大限度地满足了用户和生产厂商的需求。
工业以太网以其特有
的低成本、高实效、高扩展性及高智能的魅力,吸引着越来越多的制造业厂商。
2 工业以太网的特点工业以太网是专为工业应用专门设计的,它遵循国际标准ieee802.3(ethernet)的开。
放形式,多供应商的高性能的区域和网络单元。
工业以太网一般用于对时间要求不太严格、需要传送大量数据的通信场合。
将以
太网高速传送技术引入到工业控制领域,使得企业内部互联网、外部互联网和
国际互联网提供的技术和广泛的应用已经进入生产和过程自动化中。
这种应用推动了自动化技术和互联网技术的结合。
以太网的市场占有率已经超过80%,在当今局域网中首屈一指。
以太网有如下特点:◆可以采用冗余的网络拓扑结构,可靠性高;
◆通过交换技术可以提供实际上没有限制的通信性能;
◆灵活性好,现有设备可以不收影响地扩张;
◆在不但发展过程中有良好的向下兼容性;
◆易于实现管理信息系统和工业控制网络的联网,即管理控制网络的一体化。
以太网支持的广域开放型网络模型,可以采用多种传输媒体。
西门子公司在
工业以太网领域有着非常丰富的经验和领先的解决方案。
其中simatic net 工业以太网基于经过现场验证的技术,符合ieee802.3 标准并提供10mbit/s 以及100mbit/s 快速以太网技术。
经过多年的实践,simatic net 工业以太网的应用已多于400000 个节点,偏布世界各地,用于严酷的工业环境,并包括有高强度。