ADAMS参数化建模及优化设计
- 格式:ppt
- 大小:764.50 KB
- 文档页数:50

第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。

第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。
ADAMS动力学建模与分析实验报告实验一、曲柄连杆机构、凸轮机构建模与仿真一、实验目的1、掌握ADAMS基本操作方法,熟悉其操作界面以及软件中常用的建模工具;2、分别建立曲柄连杆机构和凸轮机构的动力学模型,仿真其运动。
二、实验流程(一)、曲柄连杆机构1、启动Adams,设置文件名为“qubingliangang”,进入工作界面,设置菜单栏中setting |working grid,将size栏中的x和y 都设置为300mm,将spacing栏中的x和y都输入5mm,按F4,打开坐标显示框;2、创建曲柄,单击Link,设置数值为9cm*1cm*1cm,单击(0,0,0)处,向右拉伸,单击鼠标。
3、创建摇杆,单击回转图标,单击(0,0,0)和(-120,0,0),设置回转中心线,之后鼠标分别点击(0,5,0),(0,10,0),(-120,10,0),(-120,5,0),(0,5,0),单击鼠标右键,完成;4、创建活塞,单击圆柱创建图标,设置长度和半径分别为21cm和0.5cm,在(0,0,0)处单击,向左延伸。
5,在各铰接点处添加转动副,在摇杆与活塞之间创建圆柱幅,在曲柄上添加动力,设置其转动速度为60r/s,则建模完成;6、单击仿真按钮,设置Duration 为5,Step size为0.0001,单击开始,则可以观察到运动仿真结果,如下所示:(二)、凸轮机构1、启动Adams,设置文件名为“tulun”,进入工作界面,设置菜单栏中setting |working grid,将spacing栏中的x和y都输入10mm,按F4,打开坐标显示框;2、创建凸轮,单击多义线图标,选中下面的closed选项,绘制封闭的多义线,依次点击凸轮外表面上的13个点,选择完毕后单击右键生成凸轮曲线。
然后在(0,-130,0)处创建凸轮转动副;3、创建平动部件,单击多义线图标,取消下面的closed选项,绘制不封闭的多义线,选择该曲线上的11个点,选择完毕后单击鼠标右键,生成该曲线;然后单击BOX图标,在下方的选项中选择Add to part,鼠标点击开放的曲线,之后定义盒子的顶点为(-250,50,0),按住鼠标拖动至(250,180,0),释放鼠标,则可建成平动部件;4、在平动部件与地面之间添加移动副;5、单击凸轮接触图标,点击凸轮部件,再单击其他部件曲线部分,建立线-线接触;6、给凸轮添加旋转运动,speed设置为360d;7、分别建立平动部件的位移测量、速度测量和加速度测量;如下图所示为实验结果:实验二、保龄球运动、平抛运动建模与仿真一、实验目的1、掌握ADAMS基本操作方法,熟悉其操作界面以及软件中常用的建模工具;2、分别建立平抛运动和保龄球运动的动力学模型,仿真其运动。
RSSR机构的ADAMS参数化建模及优化技术研究CUI Suhua;ZHANG Jingmei;YANG Songlin;DING Zhaopeng【摘要】为对空间RSSR四杆机构进行优化设计,以RSSR机构为研究对象,运用解析法对RSSR机构进行了运动学分析,得出RSSR机构的运动解析式,确定曲柄存在条件的表达式;利用ADAMS软件参数化编程技术,将空间四杆机构关键点参数化,构建三维参数化模型;运用ADAMS软件的二次开发技术,开发了空间RSSR四杆机构的参数化建模及分析优化系统,实现了RSSR机构运动类型的判定、快速建模、机构仿真、运动分析及优化;最后,进行了实例分析.结果表明,对于给定的RSSR机构,系统运动分析优化后,摇杆的角速度、角加速度的最大值和最小值的绝对值明显减小,摇杆摆动速度趋于平稳.研究结果对提高RSSR机构的设计效率、减少设计周期具有参考价值.【期刊名称】《河北工业科技》【年(卷),期】2019(036)001【总页数】6页(P9-14)【关键词】计算机辅助设计;ADAMS;RSSR;参数化建模;优化设计【作者】CUI Suhua;ZHANG Jingmei;YANG Songlin;DING Zhaopeng【作者单位】【正文语种】中文【中图分类】TH112;TH113.2在工业机械中,空间连杆机构比平面杆机构具有更紧凑的结构外形、更复杂的运动形式,可用更少构件实现复杂多样的空间轨迹,工作可靠性更高[1-3],应用范围广泛。
如剑织机的引纬机构,飞机中的升降舵传动机构、副翼操纵机构等。
含有首末2个转动副和中间2个球面副的空间四杆机构一般用RSSR表示。
近20年,关于空间RSSR四杆机构的研究方法主要有矢量法、解析法、方向余弦矩阵法、复数法、图解法等[4-7]。
图解法需从三维到二维投影变换,作图复杂,在二维平面内难以完整表达机构的三维几何信息,准确性差[8]。
解析法需运用向量或矩阵等数学工具,计算量大,计算机编程复杂[9]。
Adams参数化与优化分析经典案例在机械产品设计进程中,有各种各样的性能指标,甚至有些指标是相互制约的,因此很难通过一次设计就得到满意的结果。
以往采用的手动修改方法费时费力,浪费资源。
使用Adams软件,用户可以通过参数化及优化功能自动完成机械系统的设计,得出最优化的方案,大大提高设计效率。
参数化和优化是用户关注度最高的功能之一,但在Adams基本包的官方培训教程中没作重点介绍。
本期信工诚向大家分享一个参数化与优化方面的经典案例,帮助大家尽快熟悉这一功能。
案例摘自陈志伟编著的《MSC Adams多体动力学仿真基础与实例解析》一书中的第七章。
问题描述:小球在一定倾角的斜板上在重力作用下滑落,研究该倾角为多少时可以顺利通过预先设置的圆环中心。
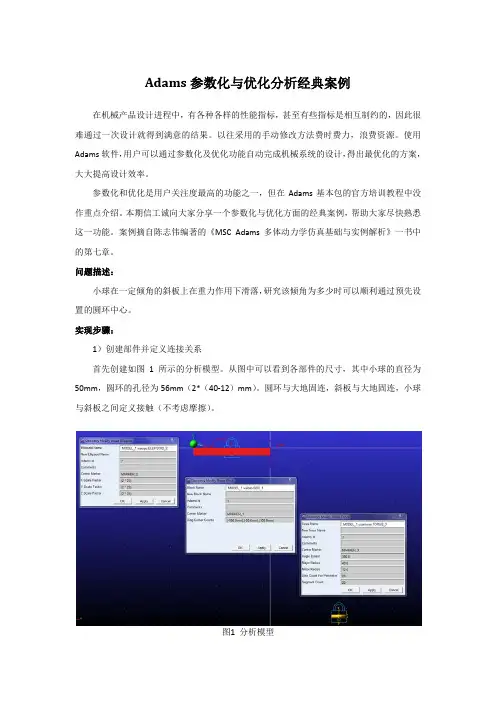
实现步骤:1)创建部件并定义连接关系首先创建如图1所示的分析模型。
从图中可以看到各部件的尺寸,其中小球的直径为50mm,圆环的孔径为56mm(2*(40-12)mm)。
圆环与大地固连,斜板与大地固连,小球与斜板之间定义接触(不考虑摩擦)。
图1 分析模型2)参数化模型模型参数化分为两步,第一步定义设计变量,第二步将现有模型数据用设计变量替换,实现模型参数化。
本例需要定义一个独立变量(斜板角度)和两个非独立变量(小球X坐标和Y坐标)。
斜板角度参数化如图2所示,小球坐标参数化如图3所示。
图2 斜板角度参数化图3 小球坐标参数化参数化后将斜板角度初始值改为-10,检查修改后的模型显示是否正确。
如果所有的参数定义都正确的话,修改后的模型显示效果会如图4所示。
图4 修改斜板初始角度3)定义优化目标我们的设计目标是让小球穿过圆环,但这不是软件能读懂的机器语言。
这里我们可以建立一个小球中心Marker点和圆环中心Marker的“点的点对点测量”,以测量结果的最小值作为优化目标,当测量结果的最小值小于3mm(圆环孔半径与小球半径之差)即代表小球穿过圆环。
建立好测量后运行一次2秒200步的仿真,并查看测量结果。
ADAMS参数化建模及优化设计ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的参数化建模和优化设计软件,广泛应用于机械系统的动力学模拟和优化。
本文将针对ADAMS的参数化建模和优化设计进行详细探讨。
参数化建模是指将机械系统的设计参数进行编程和建模,实现系统的变量化描述。
ADAMS软件提供了强大的参数化建模功能,可以对系统的几何形状、材料属性、运动约束等进行参数化描述。
通过参数化建模,工程师可以灵活地调整系统的参数,快速验证不同设计方案的性能差异,为优化设计提供重要的支持。
在ADAMS中,参数化建模可以通过两种方式实现:一种是基于CAD几何模型进行建模,另一种是基于ADAMS内置的建模工具进行建模。
对于基于CAD几何模型的建模,工程师可以直接导入CAD文件,然后通过ADAMS 提供的工具对几何模型进行进一步处理,添加运动约束和物理特性等。
而基于ADAMS内置的建模工具进行建模,工程师可以通过简单的拖拽和参数调整就能够快速构建机械系统模型。
参数化建模之后,就可以进行系统的优化设计了。
ADAMS软件提供了多种优化方法和算法,如遗传算法、粒子群算法、单目标优化、多目标优化等。
工程师可以根据具体需求选择适合的优化方法,通过设定优化目标和约束条件,对系统进行优化设计。
在进行优化设计时,需要定义目标函数和约束条件。
目标函数是指系统的优化目标,可以是最小化系统一些性能指标,如最小化系统的质量、最小化系统的振动等。
约束条件是指系统设计必须满足的条件,如材料的强度、系统的尺寸约束等。
通过设置合适的目标函数和约束条件,ADAMS 可以自动寻找最优的设计方案。
在进行参数化建模和优化设计时1.系统的参数化建模应该尽可能准确地反映实际情况,避免过度简化或者误差过大。
2.在进行优化设计时,应该明确优化的目标和约束条件,以及优化的范围和限制。
3.在优化设计过程中,可能需要进行多次的仿真和优化迭代,直到找到最优的设计方案。
基于ADAMS的剪叉机构的参数化建模及优化设计刘洋;姜吉光【摘要】In order to solve large variations in the force of the drafting table scissor mechanism hinge in the horizontal direction, motion instability and other issues, first, with the SolidWorks mechanical design, scissor mechanism exists uneven stress problem was analyzed,and the innovative design that spring tension balances off part of the loads,to re-duce the level of scissor mechanism hinge loads in the horizontal direction was proposed. Then the general method of parameterized modeling of ADAMS and optimization design was summarized. Based on this method parameterized mod-eling of scissor mechanism was established, simulation experiment was made, and the design was further optimized by ADAMS. Finally, the physical testing was made. Adding a spring can greatly reduce the level of scissor mechanism hinge loads in the horizontal direction was showed by simulation results, the optimal solution of design variables was obtained from optimization results, the mechanism force changes were reduced, through the physical testing correctness of the design was verified.%为了解决绘图桌的剪叉机构的铰链处水平方向受力变化幅度大,运动不稳定等问题,利用SolidWorks软件进行机械设计,对剪叉机构存在的受力不均问题进行了分析,提出了一种用弹簧拉力平衡掉一部分载荷、减少铰链处水平方向受力的创新设计。
2.6凸轮机构的参数化设计及轮廓曲线优化此节以盘形凸轮为例进行介绍:传统的凸轮设计方法有图解法和解析法两种。
图解法简单,直观,但设计的精度有限;解析法的设计精度较高,但计算量比较大,往往需要编写复杂的计算机程序。
由于盘形凸轮比较简单,可直接用ADAMS/VIEW 作为软件平台来进行凸轮的参数化设计,利用其强大的仿真分析能力进行从动件的运动学分析,根据输出速度和加速度曲线的仿真结果对其运动规律进行修正,从而实现凸轮轮廓曲线的优化。
已知一尖端偏置移动从动件盘形凸轮机构。
已知凸轮的基圆半径等于100mm,偏距=20mm,凸轮沿逆时针方向以匀角速度=30d/s转动,从动件的位移运动规律方程如下:按等速速规律运动时的推程为:s=h-:180 「0 _ _180(7)按简谐规律运动时的回程为:.s=h-〉2 ‘1 cos[二一:一180 (扌「180)]? 180 _ - 360(8)对上述实例用ADAMS/View模块进行虚拟样机的建模,建模过程如下:1. 启动ADAMS/View。
2. 创建凸轮机构模型名称:tulunjigouca nshuhua3. 设置工作环境:保持系统默认单位值,设置工作网格,将size的x值设置为400,y值设置为400,将Spaci ng中的x、y值均设置为10。
设置工作图标,将New Size设置为20。
然后按F4,打开光标位置显示。
4. 创建尖顶从动件:(1)单击 ',设置参数如图2-113所示,点击(0, 0, 0)和(0, 20,0)两点。
将所创建的圆锥体重命名为follower。
(2)单击:」、,设置参数如图2-114所示,点击follower,再点击(0, 20,0),然后向上拖动光标,然后点击工作区域。
(3)单击也,在follower的尖端处创建一个add to part的标记点MARKER 。
,将follower 的尖端移动到(20, 98, 0)处。
ADAMS参数化建模与优化设计ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的多体动力学仿真软件,被广泛应用于机械系统的动力学分析与设计优化中。
它的参数化建模与优化设计功能可以帮助工程师更快速、更高效地进行系统设计与优化。
参数化建模是将系统的设计参数以变量的形式进行描述和表示,以便进行系统的动力学仿真分析和设计优化。
在ADAMS中,可以通过定义几何参数、材料属性、连接关系等参数的变化范围和约束条件,来进行系统的参数化建模。
对于复杂的机械系统,可以通过ADAMS提供的图形界面来逐步建立模型,并且可以通过自定义脚本进行复杂操作,从而构建方便进行参数化分析和优化的模型。
在参数化建模完成后,可以利用ADAMS进行系统的动力学仿真分析。
通过对系统的各种输入条件施加不同的变化,如力、速度和位移等,可以得到系统在不同工况下的运动学和动力学响应。
这样可以帮助工程师更深入地理解系统的性能和行为,找到系统中可能存在的问题和优化的空间。
基于ADAMS的参数化建模,可以方便地进行系统的设计优化。
通过对设计参数的变化范围和优化目标进行定义,ADAMS可以自动地进行参数寻优和设计优化。
在设计优化过程中,可以将系统的性能指标作为目标函数进行优化,如最小化能耗、最大化刚度和最小化振动等。
同时,还可以设置各种约束条件,如材料强度、装配尺寸和运动范围等,以确保优化设计的可行性和可靠性。
1.提高设计效率:通过参数化建模,可以快速搭建系统模型,减少了从零开始设计的时间和工作量,提高了设计效率。
2.提高设计质量:通过动力学仿真分析和设计优化,可以直观地了解系统的性能与行为,并找到系统存在的问题和待优化的空间,从而提高设计质量。
3.缩短优化周期:ADAMS可以自动进行参数寻优和设计优化,节省了手动调整参数和分析结果的时间,缩短了优化周期。
4.精细设计控制:通过对设计参数的变化范围和优化目标的定义,可以对系统的设计过程进行精细控制,实现更精确的设计结果。
ADAMS参数化建模及优化设计ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的多体动力学仿真软件,广泛应用于车辆、机械装置和机器人等领域。
ADAMS提供了参数化建模和优化设计的功能,可以帮助工程师进行系统设计和性能优化。
ADAMS参数化建模是指使用ADAMS软件来构建系统模型时,将模型的各种参数设置为变量,以便在模拟过程中对其进行修改。
这样可以方便地分析和比较不同参数取值对系统性能的影响。
ADAMS提供了丰富的几何和材料建模工具,可以快速创建复杂的系统模型。
通过参数化建模,工程师可以更好地理解系统的行为,并根据不同条件进行模拟和测试。
ADAMS优化设计是指使用ADAMS软件进行系统设计优化。
在设计优化过程中,通常会设置设计变量、目标函数和约束条件,并使用ADAMS的优化算法最优解。
优化设计可以帮助工程师找到系统的最佳设计方案,以满足特定的需求和约束。
1.车辆动力学仿真:ADAMS可以对车辆进行动力学仿真,在模拟过程中考虑车辆的动力、悬挂系统、转向系统等各个方面的参数。
通过参数化建模和优化设计,可以对车辆性能进行分析和优化,提高车辆的操控性和安全性。
2.机械装置设计:ADAMS可以模拟和分析各种机械装置,如机械手臂、传送带系统、机床等。
通过参数化建模和优化设计,可以优化机械装置的运动性能、工作效率和稳定性。
3.器械运动学仿真:ADAMS还可以用于器械的运动学仿真,如手术机器人、运动辅助装置等。
通过参数化建模和优化设计,可以帮助工程师优化器械的运动范围、精度和安全性。
4.结构动力学分析:ADAMS还可以进行结构动力学分析,如建筑物地震响应、风力作用等。
通过参数化建模和优化设计,可以优化结构的抗震能力和稳定性。
在使用ADAMS进行参数化建模和优化设计时,需要注意以下几个问题:1.参数设置:在参数化建模时,需要正确设置参数的变化范围和步长,以避免过于大或过于小的值对结果造成不良影响。
基于ADAMS的备胎收放装置参数化建模及优化设计彭超;李立顺;李红勋【摘要】针对某型车备胎收放装置起始时刻速度较大,抖动较剧烈的现象,通过ADAMS将装置关键点位置参数化,对该机构进行参数化建模分析.将参数化模型某铰接点设置变量,以机构运动行程平稳为设计目标,在ADAMS中进行最优求解,得到了铰接点最优位置.通过验证,优化方案能较好地改善出现的问题.%To solve the problem that a spare tire release and retract device starts at a high speed and shakes violently, locations of key points of the device are parameterized to conduct parameterized modeling analysis on the mechanism based on ADAMS. A hinge point of the parameterized model is set as variable and steady running of the mechanism as design goal for optimal solution in ADAMS, obtaining optimal position of the hinge point. Tests demonstrate that the optimization plan is a good solution to the problem.【期刊名称】《起重运输机械》【年(卷),期】2017(000)010【总页数】3页(P75-77)【关键词】备胎收放装置;参数化建模;优化【作者】彭超;李立顺;李红勋【作者单位】陆军军事交通学院研究生管理大队天津 300161;国家应急交通运输工程中心天津 300161;国家应急交通运输工程中心天津 300161【正文语种】中文【中图分类】U463.32+6某型车在驾驶室后方安装有备胎收放装置,它利用常流式动力转向系统,在底盘的动力转向系统基础上增加一个回路,来实现备胎的收放[1]。