螺旋输送机计算
- 格式:doc
- 大小:499.50 KB
- 文档页数:12
1行星齿轮传动的符号在行星齿轮传动中较常用的符号如下。
n ——转速,以每分钟的转数来衡量的角速度,r /min 。
ω——角速度,以每秒弧度来衡量的角速度,rad /s 。
a n ——齿轮a 的转速,r /min 。
b n 一一内齿轮b 的转速,r /min 。
x n ——转臂x 的转速,r /min 。
c n ——行星轮c 的转速,r /min 。
ab i ——a 轮输入,b 轮输出的传动比,即 ab i =±baz z CABi ——在行星齿轮传动中,构件A 相对于构件c 的相对转速与构件B 相对构件C 的相对转速之比值,即C AB i =A CB Cn n n n --xabi ——在行星齿轮传动中,中心轮a 相对于转臂x 的相对转速与内齿轮b 相对于转臂x 的相对转速之比值,即x ab i =a xb xn n n n --根据原始条件可以确定所需用的输入功率为16.5 6.80.980.980.980.98P P KW ===⨯⨯入至此,可以确定所用的电动机的型号 Y160M-6 行星轮数3p n =。
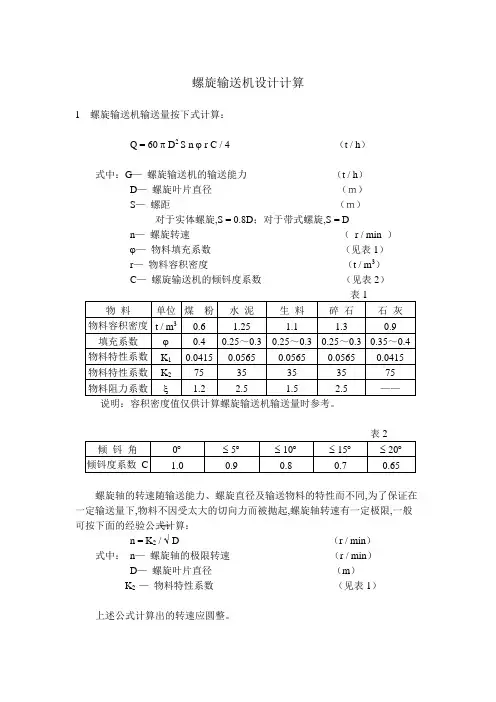
配齿计算2传动比条件在行星齿轮传动中,各轮齿数的选择必须确保实现所给定的传动比p i 的大小。
例如,2z —x(A)型行星传动,其各轮齿数与传动比p i 的关系式为b ax i =1-x ab i =1+baz z 可得b z =(bax i -1)a z若令 Y=a z p i ,则有b z =Y-a z式中 p i ——给定的传动比.且有p i =b ax i ;Y ——系数,必须是个正整数;a z ——中心轮a 的齿数,一般,a z ≥min Z 。
3邻接条件 4同心条件在此讨论的同心条件只适用丁渐开线圆柱齿轮的行星齿轮传动。
所谓同心条件就是出中心轮a 、b(或e)与行星轮c(或d)的所有啮合齿轮副的实际中心距必须相等。
对于2Z —X(A)型行星齿轮传动,其同心条件为accb a a ''= 在一般情况下,齿数a z 和b z 都不是p n 的倍数。
当齿轮a 和b 的轮齿对称线及行星轮1的华而Q1与直线O Ⅰ重合时,行星轮2的平面Q 2与直线O Ⅱ的夹角为C δ如果转臂x 固定,当中心轮a 按逆时方向转过C δ时,则行星轮2按顺时针方向转过C δ角,而内齿轮b 按顺时针方向转过C δ角。
当p n 个行星轮在中心轮周围均匀分布时,则两相邻行星轮间的中心角为2pn π。
现设已知中小轮a 和b 的节圆直径ad '和b d ',其齿距为a b p p p ==。
在中心角2p n π内,中心轮a 和b 具有的弧长分别为 a p d n π' 和 b pd n π'对于弧长a pd n π',一般应包含若干个整数倍的齿距p 和一个剩余弧段(a ap δγ'-)。
同理,对于弧长b pd n π',也应包含有若干个整数倍的齿距p 和一个剩余弧段b bδγ'。
可得 12()a ab b a b p p z z nc c pδγδγ''-++=++显然,等式左边等于整数。
要使等式右边也等于整数,其必要和充分的条件是a ab b δγδγ''= 公式表明:两中心轮a 和b 的齿数和(a b z z +)应为行星轮数p n 的倍数, 就是2Z —X(A)型行星传动的安装条件。
5 2Z-X(A)型行星传动据2Z-X(A)型行星齿轮传动的传动比公式1bp az i p z =-= 式中——P 是行星齿轮的特性参数。
应该指出:在对b 轮齿数b z 进行圆整后,此时实际的p 值与给定的p 值稍有变化,但必须控制在其传动比误差范围内。
一般其传动比误差p pi i i i -∆=≤4%。
据同心条件可求得行星轮c 的齿数为222p b a c a i z z z z --==显然,由上式所求得的c z 适用于非变位的或高度变位的行星齿轮传动。
如果采用角度变位的传动时,行星轮c 的齿数c z 应按如下公式计算,即2b ac c z z z z -'=+∆ 当(b a z z -)为偶数时,可取齿数修正量为a z ∆=-1。
此时,通过角度变位后,既不增 大该行星传动的径向尺寸,又可以改善传动性能。
综合上述公式.则可得2Z —X(A)型传功的配齿比例关系式为2:::::(1):2p p a b c a a p a a pi i z z z c z z i z z n -=-最后,再按公式(3—7)校核其邻接条件。
根据给定的行星齿轮传动的传动比p i 的大小和中心轮a 的齿数a z 及行星轮个数p n ,由表3—2可查得2Z —X(A)型行星齿轮传动的传动比p i 及其各轮齿数。
根据以上步骤可以确定其齿数及传动比如下:a z 17、c z 67、b z 151、bax i 9.88。
参数计算6标准直齿圆柱齿轮的基本参数模数——分度圆上的齿距p 与圆周率π(无理数)的比值,即 pm π=模数m 是齿轮的一个基本参数,其单位为mm(毫米)。
因齿距p m π=,若模数m 增大,则齿轮的齿距p 就增大;齿轮的轮齿及各部分尺寸均相应地增大。
为了齿轮的设计、制造和测量等工作的标准化,模数m 的数值已经标准化。
渐开线圆柱齿轮模数可参见GB1357-1987。
在此应该指出,由于在齿轮的不同圆周上,其齿距不相同,故其模数也是不同的;只有分度圆上的模数m 是标准值。
因齿轮分度圆的周长为 d zp π=,即可得pd z π= ;两式联立可得齿轮的分度圆直径d mz =齿项高系数*a h ——按GBl356—1988规定:正常齿*a h =1,短齿*a h =0.80。
顶隙系数*c ——按GBl357—1988规定:正常齿*c =0.25,短齿*c =0.3。
一对渐开线圆柱直齿轮的正确啮合条件是:两齿轮的模数m 相等,分度圆压力角α相等,即12m m m == 12ααα== 齿轮的模数的确定,由公式初算得12.1 1.71m K ===mm根据所设计的题目要求,选定模数 2.5m mm =。
表5-2受力分析及强度计算7行星齿轮传动的受力分析在已知原动机(电动机等)的名义功率P 和同步转速n 的条件下,其输入件所传递的转矩A T 可按下式计算,即119550A P T n = (N ·m ) 式中 1p ———输入件所传递的名义功率,kw ; 1n ———输入件的转速,r /min 。
在圆柱齿轮传动中,若忽略齿面间的摩擦力的影响,其法向作用力n F 可分解为如下的三个分力,即 切向力112000t T F d = (N) 径向力tan cos t nr F F αβ=(N)轴向力 tan a t F F β= (N) 法向力n F 与切向力t F 的关系式为 cos cos tn nF F βα=⨯(N )对于直齿圆柱齿轮传动,由于轮齿的螺旋角0β=,法面压力角n αα=,故其轴向力a F =0,则可得切向力 112000t T F d =(N) 径向力 tan r t F F α= (N) 法向力 cos tn F F α=(N)式中 1T ——啮合齿轮副中小齿轮传递的转矩,N ·m ; β——斜齿轮分度圆上的螺旋角,(°); 1d ——小齿轮分度圆直径,mm ; α——分度圆压力角,通常α=20°。
8行星齿轮传动首先应计算输入件中心轮a 在每一套中(即在每个功率分流上)所承受的输入转矩为1119550a p p T P T n n n == 式中 a T ——中心轮a 所传递的转矩,N ·m ;p n ——行星轮数目。
按照上述提示进行受力分析计算,则可得行星轮c 作用于中心轮a 的切向力为111 6.89550955022.329703a p p T P T N m n n n ====⋅⨯ 20001050.17aca p aT F N n d ==' 1050.17ac ca F F N =-=- 1050.17bc ac F F N ==- 22100.34xc ac F F N =-=-31052100.34661.607x p x cx T n r F N m ==⨯⨯=⋅ 1050.17cb bc F F N =-= 594.662000bb p cb d T n F N m '=⨯=⋅ 9 行星轮支承上和基本构件轴上的作用力。
圆柱中心轮与行星轮相啮合时,行星轮上的切向力ic F 可按如下公式计算,即2000iic p i T F n d ='(N ) 例如,在2Z —X(A)型行星齿轮传动中,中心轮a 作用于行星轮c 上的切向力ac F公式(6—10)计算,即 2000aac p aT F n d -=' (N ) 对于钢制行星轮c ,其材料密度637.810/kg mm ρ-=⨯;行星轮的相对体积 24xc cd V b πλ=将ρ和x c V 的关系式代入公式,则可得2Z —X(A)型传动行星轮的离心力LF 为11226.3710L c xx F d bn r λ-=⨯ 式中 c d ——行星轮c 的分度圆直径,mm ; b ——行星轮的宽度,mm ;λ——行星轮的折算系数.相对于转臂x 转动的行星轮及其轴承的质量直径为 c d 、宽度为b 的实心钢制圆柱体质量之比值的系数。
当滚动轴承安装在行星轮内时,0.5~0.7λ=;当滚动轴承安装转臂x 内时,1~1.3λ= 。
10箱体的结构及各个尺寸的计算数值如下:(1)箱体的材料为 HT200,采用铸造,机体的结构采用卧式不剖分机体(2)尺寸系数 334002171.4710001000D B K δ+⨯+===式中 D ——机体内壁直径 B ——机体宽度故 其K δ值在1.25~1.6之间,壁厚δ大于10~13。
根据实际情况取δ为12mm 。
机体壁厚 δ=12mm 前机盖厚度 110mm δ= 后机盖厚度 212mm δ=机体法兰凸缘厚度 311.2515d mm δ== 加强筋厚度 412mm δ= 加强筋斜度 2α=︒机体和机盖紧固螺栓直径 112d mm = 轴承端盖螺栓直径 210.810d d mm == 地脚螺栓直径1216d mm =≥= 机体底座凸缘厚度 (1~1.5)24h d mm == 地脚螺栓孔的位置12 1.2(5~8)26(5~8)22c d mm c d mm=+==+=11螺旋周长的计算螺旋外周长:1.318()L m === 螺旋内周长:10.47234()L m === 0.40.04()25252d D r m ====⨯⨯ 0.420.2()22D D R R m =⇒=== 0.20.040.16()R c r c R r m =+⇒=-=-= 12螺旋机的输送量根据所给的原始条件可以计算出螺旋机的输送量Q ; 因为是水平布置的H=0、β=0 。