基于IEEE标准的电脑鼠走迷宫的智能算法研究
- 格式:pdf
- 大小:407.81 KB
- 文档页数:4
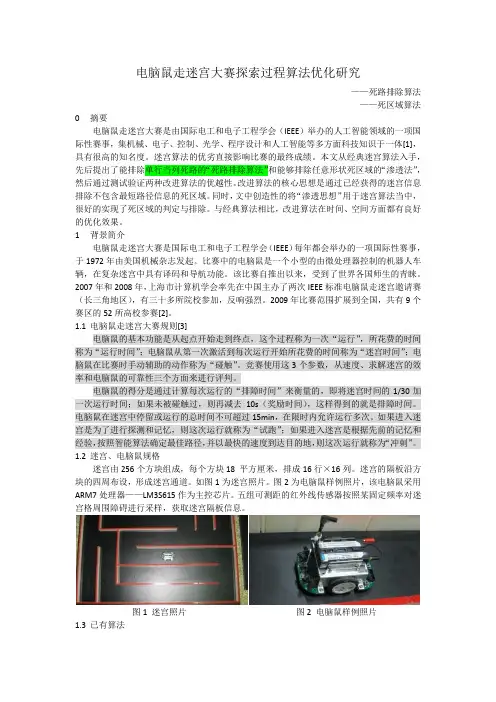
电脑鼠走迷宫大赛探索过程算法优化研究——死路排除算法——死区域算法0摘要电脑鼠走迷宫大赛是由国际电工和电子工程学会(IEEE)举办的人工智能领域的一项国际性赛事,集机械、电子、控制、光学、程序设计和人工智能等多方面科技知识于一体[1],具有很高的知名度。
迷宫算法的优劣直接影响比赛的最终成绩。
本文从经典迷宫算法入手,先后提出了能排除单行当列死路的“死路排除算法”和能够排除任意形状死区域的“渗透法”,然后通过测试验证两种改进算法的优越性。
改进算法的核心思想是通过已经获得的迷宫信息排除不包含最短路径信息的死区域。
同时,文中创造性的将“渗透思想”用于迷宫算法当中,很好的实现了死区域的判定与排除。
与经典算法相比,改进算法在时间、空间方面都有良好的优化效果。
1背景简介电脑鼠走迷宫大赛是国际电工和电子工程学会(IEEE)每年都会举办的一项国际性赛事,于1972年由美国机械杂志发起。
比赛中的电脑鼠是一个小型的由微处理器控制的机器人车辆,在复杂迷宫中具有译码和导航功能。
该比赛自推出以来,受到了世界各国师生的青睐。
2007年和2008年,上海市计算机学会率先在中国主办了两次IEEE标准电脑鼠走迷宫邀请赛(长三角地区),有三十多所院校参加,反响强烈。
2009年比赛范围扩展到全国,共有9个赛区的52所高校参赛[2]。
1.1电脑鼠走迷宫大赛规则[3]电脑鼠的基本功能是从起点开始走到终点,这个过程称为一次“运行”,所花费的时间称为“运行时间”;电脑鼠从第一次激活到每次运行开始所花费的时间称为“迷宫时间”;电脑鼠在比赛时手动辅助的动作称为“碰触”。
竞赛使用这3个参数,从速度、求解迷宫的效率和电脑鼠的可靠性三个方面来进行评判。
电脑鼠的得分是通过计算每次运行的“排障时间”来衡量的,即将迷宫时间的1/30加一次运行时间;如果未被碰触过,则再减去10s(奖励时间),这样得到的就是排障时间。
电脑鼠在迷宫中停留或运行的总时间不可超过15min,在限时内允许运行多次。
电脑鼠走迷宫作者:陈敬作者单位:省杭州市青少年科技活动中心1.期刊论文曾璐.周贤娟迷宫电脑鼠控制系统设计-自动化博览2009,26(7)电脑鼠实际上是集传感与控制于一体的,能够自动穿越迷宫的微型机器人.本课题结合模拟电路、数字电路知识以及传感器知识,制作出一个性能优良的电脑鼠,在迷宫中找到一条最优路径,走出迷宫.根据国际标准迷宫电脑鼠的比赛规则,通过各种方案的对比,确定在本文中采用NXP公司ARM7LPC2138作为控制核心,将新兴的群智能算法运用到迷宫电脑鼠中.2.期刊论文朱闻达IEEE迷宫电脑鼠的迷宫搜索算法研究-中国科技博览2009,""(27)迷宫电脑鼠的概念最早由IEEE Spectrum杂志在七十年代提出,随后这项比赛先后在英国、美国、日本、新加坡等国家开展,现在已成为世界级的电子机器人竞赛.电脑鼠是一个能够自主搜索一个16×16单元格的迷宫中心机器人小车.本文总结了常见的搜索算法,吸收现有算法的思想,提出一个适用于电脑鼠竞赛的实用算法.为了测试所设计的算法的性能,用Visual Studio制作测试环境,编程实现上述算法,设置了数个正式比赛使用的迷宫来进行算法测试,并且借助图形界面展示算法仿真的效果,测试结果表明算法具有较好的实时性和鲁棒性.3.期刊论文吴曼晨迷宫电脑鼠的硬件设计简介-中国科技博览2009,""(27)人工智能技术是一门融合了众多学科的新星科学,它被广泛地应用于勘探、侦察、医疗救援、抢险以及日常生活的各个方面.智能机器人竞赛则是一项旨在开发人工智能技术而举行的比赛,它集科学、娱乐和比赛于一体,在各国引起了广泛关注和极大兴趣.目前国际上有很多针对机器人技术的比赛,而IEEE迷宫鼠竞赛则是其中的一个典型代表.本文首先对近年来在国际上迅速开展的迷宫机器人竞赛作了简要介绍,简要说明了迷宫鼠竞赛的竞赛规则以及发展历史,同时也分析了国内外关于此课题的研究现状.其次,本文对迷宫鼠的硬件设计作了一个整体规划,将迷宫鼠的设计分为微控制器模块、马达驱动模块、传感器模块、人工智能模块和数据存储及传输模块.最后还对参加IEEE迷宫鼠竞赛的智能机器人作了一些测试.4.期刊论文朱姗.傅或哲.吴忠丽.王伟.仇润鹤一种走迷宫电脑鼠的设计与实现-微型电脑应用2008,24(9)该文介绍了一种基于ARM嵌入式的电脑鼠,主要由电源、传感子系统、电机控制子系统、微控制器单元等功能模块组成,文中对各个模块的工作原理,分别从硬件结构、软件流程二个主要环节对走迷宫的电脑鼠实现过程进行深入的说明,并在算法方面对传统的中左法则进行了改进,基于泛洪算法的思想,结合向心法则,提出了一种简单的电脑鼠走迷宫的算法,仅用一个一维数组就可以记录迷宫的全部信息,具有较低的复杂度,易于实现编程,本设计有较广泛的发展应用前景.5.期刊论文屈传坤.徐国政.崔建伟.宋爱国.QU Chuan-kun.XU Guo-zheng.CUIJian-wei.SONG Ai-guo基于DSP的电脑鼠系统设计-电气电子教学学报2008,30(4)本文设计了一种基于DSP的微型机器人一电脑鼠系统.通过对车体速度和方向进行控制,使电脑鼠顺利穿越迷宫到达终点并顺利返回起点.实践证明,该系统能完全实现自主控制,抗干扰能力强,稳定性好.6.会议论文张晋嵌入式电脑鼠运行算法的研究2009本文阐述了电脑鼠设计的构思和实现的过程,主要从算法上分析如何使电脑鼠寻找最佳路径快速的找到迷宫终点。
计算机迷宫搜索算法仿真研究摘要:在电脑鼠的设计过程中,往往需要耗费大量的时间在迷宫搜索算法的调试上。
通过研究迷宫地图,采用模块化的设计方法,模拟实现了对迷宫搜索算法的仿真,还设计了迷宫地图的编辑和迷宫搜索算法的导入等功能。
仿真试验结果表明,仿真迷宫搜索算法可提高迷宫搜索算法设计和调试的效率。
关键词:电脑鼠;迷宫搜索算法;仿真;多线程电脑鼠[1](Micromouse)是一个由微控制器、探测器、驱动电机组成的一种集感知、判断、行走功能于一体,能够在迷宫中自动寻找到达终点最佳路径的微型机器人。
电脑鼠走迷宫比赛集竞赛和趣味性于一体,吸引了大量青年科技人员参加,文献[1]给出了有关迷宫电脑鼠的比赛规则和要求。
在迷宫电脑鼠的设计中,迷宫搜索算法的设计和调试最困难[3-7]。
主要因为迷宫搜索算法的设计和调试过程容易受到周围环境以及电脑鼠底层软硬件的影响而出现运行错误,从而使得调试经常被打断,完成一次完整的调试非常麻烦[8],需耗费大量时间。
本文针对电脑鼠设计者在迷宫搜索算法设计和调试上所面临的问题,设计了迷宫搜索算法仿真程序,提高迷宫搜索算法设计和调试的效率,减轻设计者的负担。
该算法仿真程序及其实现思路不仅可以推广到电脑鼠走迷宫竞赛中,而且还可以作为电脑鼠迷宫搜索算法研究者的一个理想研究平台。
1仿真模块设计迷宫搜索算法仿真程序的主要功能模块包含动态仿真器、迷宫搜索算法接口、人机交互界面和迷宫地图编辑器。
动态仿真器是整个程序的核心,迷宫搜索算法接口用于连接动态仿真器和迷宫搜索算法,人机交互界面和迷宫地图编辑器,分别负责响应用户的鼠标动作和迷宫地图的设置。
地图编辑器需要接受用户的动作来完成地图的编辑工作,所以将迷宫地图编辑器作为人机交互界面的一个子功能来实现。
图1是迷宫搜索算法仿真程序的系统模块框图。
动态仿真器实现了三个功能,为迷宫搜索算法获取迷宫信息,根据迷宫搜索算法的指令控制模拟电脑鼠运动,显示运行中产生的过程数据。
一种电脑鼠走迷宫的算法电脑鼠走迷宫的算法1探测策略电脑鼠走迷宫可以采用全迷宫探索策略,即将迷宫的所有单元均搜索一次,从中找出最佳的行走路径。
这种策略需要有足够的时间或探测次数,但在IEEE竞赛规则中每场竞赛只有15分钟的时间,因此是不可能的。
另一种方法是部分迷宫探索策略,即在有限的时间或探测次数下,只探测迷宫的一部分,从中找出次最佳的路径,显然只能采用这种策略。
电脑鼠在一巷道内行走,如果最后无路可走,则该巷为死巷。
电脑鼠在任一单元内,可能的行走方向最多只有三个(前、左、右),如果有二个或二个以上的可能行走方向,称为交叉,遇有交叉时,由于有多个可以行走的方向,在行走方向的选择上,可有下面的几种选择法则:•右手法则:遇有交叉时,以右边为优先的前进方向,然后是直线方向、左边方向。
•左手法则:遇有交叉时,以左边为优先的前进方向,然后是直线方向、右边方向。
•中左法则:遇有交叉时,以直线为优先的前进方向,然后是左边方向、右边方向。
与此类似的还有中右法则。
•乱数法则:遇有交叉时,取随机值作为前进方向。
•向心法则:由于终点在迷宫的中心,遇有交叉时,以向迷宫中心的方向为优先的前进方向。
2标记为了记忆迷宫的详细信息,需要对迷宫单元的位置进行线路标记。
全迷宫共有16×16个单元组成,可采用二维坐标方式标记,即用每个单元的XY坐标表示,如起点可标记为(0,0),终点为(7,7)。
此外,还需要对迷宫单元的可行进方向进行标记,可采用绝对方位或相对方位二种方式。
绝对方位:这是一种与电脑鼠行进方向无关的标记方式,以一个四位的二进制数,分别表示“东”﹑“西”﹑“南”和“北”四个方向。
以1表示允许行进(无墙壁),0表示不允许行进(有墙壁)。
相对方位:这是一种与电脑鼠行进方向有关的标记方式,以一个三位的二进制数即可实现标记,分别表示“前”“左”“右”,以1表示允许(无墙壁),0表示不允许(有墙壁)。
3阻断在电脑鼠试跑过程中或在最后冲刺时,需要对部分路径进行“阻断”,即在发现某条路径是死路(只有入口而无出口)时,在该路径的入口处(一般是交叉点)设置标记,即将入口的线路标记由1改为0。
走迷宫电脑鼠的算法分析与研究收稿日期:2010-03-30;修订日期:2010-11-08作者简介:夏炎(1984-),男,南京人,硕士研究生,研究方向:基于ARM 的嵌入式系统的设计与开发。
夏炎(南京工业大学电子与信息工程学院,南京210013)摘要:电脑鼠的灵活性和智能程度不但取决于硬件的结构和性能,还取决于软件设计的好坏,越是智能的电脑鼠,其软件设计就越不简单。
对走迷宫电脑鼠的算法做了总结和比较,并对各算法的优缺点进行了阐述。
关键词:电脑鼠;迷宫;算法中图分类号:TP18文献标识码:A 文章编号:1008-8725(2011)01-0194-03Analyzing and Researching on Maze-runningMicromouse AlgorithmXIA Yan(School of Electronics and Information Engineering,Nanjing University of Technology,Nanjing 210013,China )Abstract:The flexibility and intelligence degree of Micromouse depended on not only structure and properties of hardware,but also whether software design was good or bad.The more intelligent the Micromouse was,the more difficult software design was.This paper concluded and compared the algorithms of maze -running micromouse,and discribed advantages and disadvantages of different algorithms.Key words:Micromouse;maze;algorithm0引言人类在科技的发展史上,一直在尝试着想要创造出一个具有肢体、感官、脑力等综合一体的智能机器人,而电脑鼠就是一个能够用来诠释肢体、感官及脑力综合工作的基本实例,这也是当初电脑鼠被发明的理由,希望能够借助电脑鼠的创作来进而研究与发明更加复杂的机械。

“IEEE标准电脑鼠走迷宫”竞赛套件简介及竞赛规则为降低电脑鼠走迷宫竞赛难度,方便在校学生和电脑鼠新手快速入门,广州致远电子有限公司开发了一款IEEE国际标准电脑鼠走迷宫竞赛套件。
该套件包含电脑鼠Micromouse615(电脑鼠)、IEEE标准迷宫及丰富的配套资料。
1.Micromouse615Micromouse615采用铝制车架,重量轻,散热性能好。
采用双步进电机,车轮直接安装在电机轴上,机械结构简单安装方便。
Micromouse615车身长12cm,宽9cm,短小精悍,可灵活的在迷宫格中完成90度和180度转弯,如图0.1所示。
图0.1 Micromouse615Micromouse615微处理器采用LM3S615。
LM3S615是美国Luminay公司开发的32位单片机,基于ARM Cortex-M3内核。
LM3S615具有运算速度快,中断响应快,外设丰富等优点,保证了Micromouse615可以具有很高的智商。
另外Luminay公司提供了丰富的函数库,只要懂C就能开发,大大降低了Micromouse615的使用难度。
Micromouse615使用5组红外传感器用于检测迷宫墙壁信息,分别用于检测左、左前、前、右前和右五个方向的墙壁信息。
左前和右前传感器用于调整电脑鼠姿态,使电脑鼠走时行走在迷宫格中心。
使用5组可调电阻控制红外信号发射强度,调整可见距离。
信号采用载波调制,增强抗干扰性。
Micromouse615采用双步进电机驱动。
使用步进电机不需要减速装置等,可简化机械结构。
步进电机控制简单,运行平稳。
Micromouse615板上一个按键,一个复位按键和一个10针JTAG调试接口,并预留了一个6个JPIO、一个串口和一个SPI接口,方便扩展。
在配套光盘中配有一个能够用于参赛的程序,可稳定而快速的完成竞赛。
Micromouse615具有高度可扩展性,领用预留的接口可根据需要扩展其他部件,进行硬件升级。
电脑鼠走迷宫智能算法的研究与优化
王艺宁;蒋涵;王博;于娜
【期刊名称】《科技创新导报》
【年(卷),期】2015(000)032
【摘要】电脑鼠(Micromouse)是智能机电鼠的简称,实际上是一个由微处理器控制的,集感知、判断、行走功能于一体,能够自动寻找最佳路径到达目的地的微型机器人.该文简要分析了电脑鼠的硬件组成和工作原理,在此基础上重点对电脑鼠软件部分的探测策略模块、等高图制作模块、冲刺模块进行了分析研究与优化,并通过大量实验进行了验证.实验结果表明优化后的算法能够在一定程度上有效地提高电脑鼠走迷宫的运行速度、减少电脑鼠的搜索时间.
【总页数】3页(P129-130,132)
【作者】王艺宁;蒋涵;王博;于娜
【作者单位】天津农学院计算机与信息工程学院天津 300384;天津农学院计算机与信息工程学院天津 300384;天津农学院计算机与信息工程学院天津 300384;天津农学院计算机与信息工程学院天津 300384
【正文语种】中文
【中图分类】TP36
【相关文献】
1.基于IEEE标准电脑鼠走迷宫控制算法研究与优化 [J], 郑伟;张永飞
2.基于IEEE标准的电脑鼠走迷宫的智能算法研究 [J], 王斌;张卫钢
3.基于ARM的电脑鼠走迷宫的研究 [J], 蒋雄;任化龙;马忠丽
4.基于向心法则的电脑鼠走迷宫算法设计与优化 [J], 贺少波;孙克辉
5.基于概率距离的电脑鼠走迷宫融合算法研究 [J], 袁臣虎;路亮;王岁;李海杰;刘奇因版权原因,仅展示原文概要,查看原文内容请购买。
电脑⿏⾛迷宫电脑⿏⾛迷宫算法改进及仿真测试(部分)2.3.5 迷宫算法改进迷宫最优路径是指从迷宫的⼊⼝到达迷宫出⼝的最短通路。
传统求解迷宫路径问题的算法⼤多采⽤⼴度优先搜索(BFS)或深度优先搜索(DFS)。
由于需要全迷宫搜索,随着迷宫规模的增⼤和复杂性的增加,上述两种算法的空间和时间复杂性将呈指数增加。
针对以上问题,本论⽂对传统算法进⾏优化改进讨论,核⼼思想是利⽤已经探索得知的迷宫信息排除不包含最短路径信息的迷宫格,不予探索。
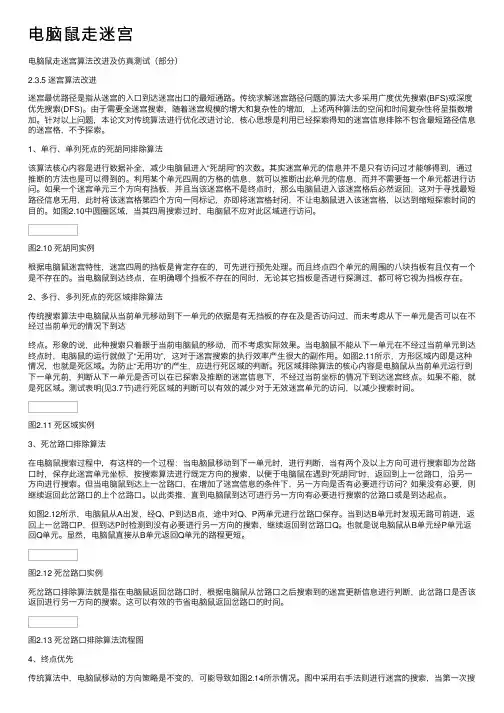
1、单⾏、单列死点的死胡同排除算法该算法核⼼内容是进⾏数据补全,减少电脑⿏进⼊“死胡同”的次数。
其实迷宫单元的信息并不是只有访问过才能够得到,通过推断的⽅法也是可以得到的。
利⽤某个单元四周的⽅格的信息,就可以推断出此单元的信息,⽽并不需要每⼀个单元都进⾏访问。
如果⼀个迷宫单元三个⽅向有挡板,并且当该迷宫格不是终点时,那么电脑⿏进⼊该迷宫格后必然返回,这对于寻找最短路径信息⽆⽤,此时将该迷宫格第四个⽅向⼀同标记,亦即将迷宫格封闭,不让电脑⿏进⼊该迷宫格,以达到缩短探索时间的⽬的。
如图2.10中圆圈区域,当其四周搜索过时,电脑⿏不应对此区域进⾏访问。
图2.10 死胡同实例根据电脑⿏迷宫特性,迷宫四周的挡板是肯定存在的,可先进⾏预先处理。
⽽且终点四个单元的周围的⼋块挡板有且仅有⼀个是不存在的。
当电脑⿏到达终点,在明确哪个挡板不存在的同时,⽆论其它挡板是否进⾏探测过,都可将它视为挡板存在。
2、多⾏、多列死点的死区域排除算法传统搜索算法中电脑⿏从当前单元移动到下⼀单元的依据是有⽆挡板的存在及是否访问过,⽽未考虑从下⼀单元是否可以在不经过当前单元的情况下到达终点。
形象的说,此种搜索只着眼于当前电脑⿏的移动,⽽不考虑实际效果。
当电脑⿏不能从下⼀单元在不经过当前单元到达终点时,电脑⿏的运⾏就做了“⽆⽤功”,这对于迷宫搜索的执⾏效率产⽣很⼤的副作⽤。
如图2.11所⽰,⽅形区域内即是这种情况,也就是死区域。
东南大学第二届IEEE标准电脑鼠走迷宫竞赛电脑鼠原理及其应用机电动力试验平台第二届IEEE标准电脑鼠走迷宫竞赛论文东南大学第二届IEEE标准电脑鼠走迷宫竞赛电脑鼠原理及其应用机电动力试验平台目录一.软件程序框图 (3)二.参赛软件研发过程 (4)三.软硬件调试过程 (4)四.各组员分工 (4)五.体会心得 (5)附录 (6)参考书目 (9)软件程序框图东南大学第二届IEEE标准电脑鼠走迷宫竞赛电脑鼠原理及其应用机电动力试验平台参赛软件研发过程在void main()函数中,采用压栈的方式进行电脑鼠搜索,数组uint8 GmcCrossway[MAZETYPE*MAZETYPE]用于暂存未走过支路坐标。
数组uint8 GucMapBlock[MAZETYPE][MAZETYPE]记录每个点的地图信息,初始化为0x00。
函数void mouseGoahead(int8 cNBlock)、void mazeSearch(void)、void mouseTurnleft(void)、东南大学第二届IEEE标准电脑鼠走迷宫竞赛电脑鼠原理及其应用机电动力试验平台void mouseTurnright(void)、void mouseTurnback(void)和void objectGoTo(int8 cXdst, int8 cYdst)控制电脑鼠的运动状态。
void mapStepEdit(int8 cX, int8 cY)为制作等高图函数,它把记录等高值的数组uint8 GucMapStep[MAZETYPE][MAZETYPE](初始化为0xff)赋值。
当电脑鼠搜索时无方向可走时就按照这个等高图的信息退回上个点,冲刺时也是一样的道理。
另外,为了缩短转弯时间,并且保证电脑鼠的稳定性,采取转弯时整步,直走时半步。
我们在Mouse_Drive.c文件中,加入全局变量int8 maincheck,初始化为0(其中0为不转弯,1为转弯)。
项目编号:070402苏州市职业大学研究性课题教学项目学生研究论文项目名称: IEEE标准电脑鼠走迷宫研究论文题目:Micromouse615电脑鼠项目报告学生班级:07嵌入式应用技术学生姓名:陆文敏范明洋阙爱兵蔡益所在系(部):计算机工程系指导教师:徐丽华目录第一章概述............................................................................................. 错误!未定义书签。
1.1 引言.................................................................................................. 错误!未定义书签。
1.2 电脑鼠的起源与发展 (5)1.2.1电脑鼠的起源 (5)1.2.2国际电脑鼠的发展 (5)1.2.3我国电脑鼠的发展情况 (7)1.3 电脑鼠比赛 (9)1.4参赛意义........................................................................................... 错误!未定义书签。
第二章电脑鼠硬件设计.. (5)2.1电脑鼠走迷宫标准套件 (7)2.1.1 Micromouse615 (7)2.1.2 Micromouse Maze (8)2.1.3 配套的开发工具 (10)2.2电脑鼠硬件设计原理 (10)2.2.1 电脑鼠硬件 (10)2.2.2实现的功能 (12)第三章电脑鼠软件设计与实现 (13)3.1迷宫地图相对方向与绝对方向的建立 (13)3.2墙壁资料存储 (15)3.3电脑鼠搜索策略 (16)3.4寻找最优路径的方法 (16)3.4.1 等高图的概念 (16)3.4.2等高图的制作原理 (17)3.4.3 等高图制作范例 (17)3.5电脑鼠转弯算法 (18)3.6主函数程序设计 (13)第四章遇到的问题及解决方法 (19)第五章总结 (21)参考文献 (22)附录IEEE电脑鼠走迷宫竞赛规则 (23)第一章前言所谓“电脑鼠”,英文名叫做MicroMouse,是使用嵌入式微控制器、传感器和机电运动部件构成的一种智能行走装置的俗称。
基于STM32的IEEE标准电脑鼠设计与实现伯恩;于媛媛【摘要】针对IEEE标准电脑鼠走迷宫的竞赛要求,介绍了一种基于STM32的电脑鼠系统的设计与实现方法.文章对硬件构成和软件算法都做了详细的介绍.该电脑鼠实现了在迷宫内快速稳定的行走及对迷宫最优路径的搜索.%According to Micromouse maze solving competition damands of IEEE criterion, the design and implementation of Micromouse based on STM32 is introduced.This paper has made a description of hardware architecture and software algorithm in detail.The Micromouse has achieved walking rapidly and stably in the maze and the optimal path of a maze search.【期刊名称】《价值工程》【年(卷),期】2011(030)020【总页数】2页(P136-137)【关键词】电脑鼠;STM32;红外传感器;陀螺仪【作者】伯恩;于媛媛【作者单位】四川大学制造科学与工程学院,成都,610065;四川大学制造科学与工程学院,成都,610065【正文语种】中文【中图分类】TP300 引言电脑鼠(Micromouse)走迷宫竞赛是一项综合性十分强的竞赛,涉及学科包括人工智能、传感器、运动控制、软件工程、电工学以及嵌入式系统等。
电脑鼠是多学科交叉结合的产物,诠释了肢体、感官、脑的协调工作。
它不仅拥有灵活的“双腿”——电机,敏锐的“眼睛”——传感器,还有智能的“大脑”——微控制器。
电脑鼠在IEEE标准迷宫中按一定规则行走,必须具备以下三种能力:①拥有稳定且快速的行走能力;②能正确判断能力;③记忆路径的能力。
基于STM32的IEEE标准电脑鼠设计与实现作者:伯恩于媛媛来源:《价值工程》2011年第20期Design and Implementation of Micromouse Based on STM32Bo En;Yu Yuanyuan(四川大学制造科学与工程学院,成都 610065)(School of Manufacturering Science and Engineering,Sichuan University,Chengdu 610065,China)摘要:针对IEEE标准电脑鼠走迷宫的竞赛要求,介绍了一种基于STM32的电脑鼠系统的设计与实现方法。
文章对硬件构成和软件算法都做了详细的介绍。
该电脑鼠实现了在迷宫内快速稳定的行走及对迷宫最优路径的搜索。
Abstract: According to Micromouse maze solving competition damands of IEEE criterion, the design and implementation of Micromouse based on STM32 is introduced. This paper has made a description of hardware architecture and software algorithm in detail. The Micromouse has achieved walking rapidly and stably in the maze and the optimal path of a maze search.关键词:电脑鼠 STM32 红外传感器陀螺仪Key words: micromouse;STM32;infrared sensors;gyroscope中图分类号:TP30文献标识码:A文章编号:1006-4311(2011)20-0136-020引言电脑鼠(Micromouse)走迷宫竞赛是一项综合性十分强的竞赛,涉及学科包括人工智能、传感器、运动控制、软件工程、电工学以及嵌入式系统等。
天津职业技术师范大学Tianjin University of Technology and Education课程设计专业班级:应电0814学生姓名:乔伟 09 李月 19 华焱建 43指导教师:刘新月系别:电子工程学院目录1 电脑鼠走迷宫 (1)1.1电脑鼠技术指标 (1)1.2电脑鼠方案论证及选择 (1)1.2.1核心控制器 (1)1.2.2传感器 (1)1.2.3电动机 (1)1.2.4电源 (1)1.3电脑鼠总体电路图 (2)1.4电脑鼠系统组成框图 (2)1.5电脑鼠单元电路设计 (2)1.5.1传感器单元 (2)1.5.2步进电机驱动单元 (3)1.5.3电源单元 (4)1.6运动算法设计 (5)1.7迷宫坐标信息采集算法 (5)1.8迷宫算法 (7)1.9测试结果分析及改进 (8)1.10总结 (8)2 智能电梯控制系统 (9)2.1主要技术指标 (9)2.2方案论证及选择 (9)2.3系统组成框图 (9)2.4单元电路设计 (10)2.4.1单片机最小系统模块 (10)2.4.2开关控制模块 (11)2.4.3电机驱动模块 (11)2.4.4液晶显示模块 (11)2.4.5报警模块 (12)2.4.6 电路总图 (13)2.5软件流程图以及任务描述 (13)2.6元件清单 (14)2.7 调试过程 (15)2.8总结 (15)参考文献 (16)附录1 电梯代码 (17)附录2 个人总结 (28)1电脑鼠走迷宫1.1电脑鼠技术指标依据IEEE标准迷宫构建相应数据结构,结合数据结构进行迷宫搜索算法的设计;分析电脑鼠硬件需求进行产品选型,构建硬件平台;实现电脑鼠自动搜索迷宫,从中选出最佳路径进行冲刺的功能。
1.2电脑鼠方案论证及选择1.2.1核心控制器基于所需完成任务要求我们知道,电脑鼠核心控制器需要有很快的信息处理速度。
那么,普通的8位单片机不能满足快速处理的条件,不能胜任任务。
为了实现高速信息处理,采用由Liminary公司生产的LM3S615控制器,该控制器是以ARM-Cortex-M3为内核的32位SOC系统,拥有50-MHz工作频率,可以胜任任务所要求的高速信息处理能力。
用于迷宫电脑鼠的一种迷宫补全算法于佳维;潘志雄;马忠梅【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2013(13)2【摘要】在IEEE电脑鼠走迷宫竞赛规则的基础上,介绍了一种基于对迷宫分析补全思想的路径规划算法.详细阐述了算法流程和实现过程,对搜索过程中的算法提出一种改进思想.实验表明,该算法可以提高电脑鼠的搜索效率,有效地减少迷宫搜索时间,提高竞赛成绩.%On the basis of the IEEE MicroMouse maze contest rules, this paper introduces a kind of path planning algorithm based on the analysis and complemented thought of the maze. This paper expounds the details about the algorithm and implementation processes, proposes a kind of improvement ideas to the algorithm during the search procedure. The experimental results show that this algorithm can improve the searching efficiency of MicroMouse, reduce maze searching time and increase competition results.【总页数】4页(P9-12)【作者】于佳维;潘志雄;马忠梅【作者单位】北京理工大学计算机学院,北京100081【正文语种】中文【中图分类】TP399;TP242【相关文献】1.基于IEEE标准电脑鼠走迷宫控制算法研究与优化 [J], 郑伟;张永飞2.一种电脑鼠走迷宫算法 [J], 周杰3.一种电脑鼠走迷宫的算法 [J], 张新谊4.一种电脑鼠走迷宫算法的设计与实现 [J], 王凤林;王宜怀5.基于概率距离的电脑鼠走迷宫融合算法研究 [J], 袁臣虎;路亮;王岁;李海杰;刘奇因版权原因,仅展示原文概要,查看原文内容请购买。