基于行为的机器人
- 格式:pptx
- 大小:188.28 KB
- 文档页数:27
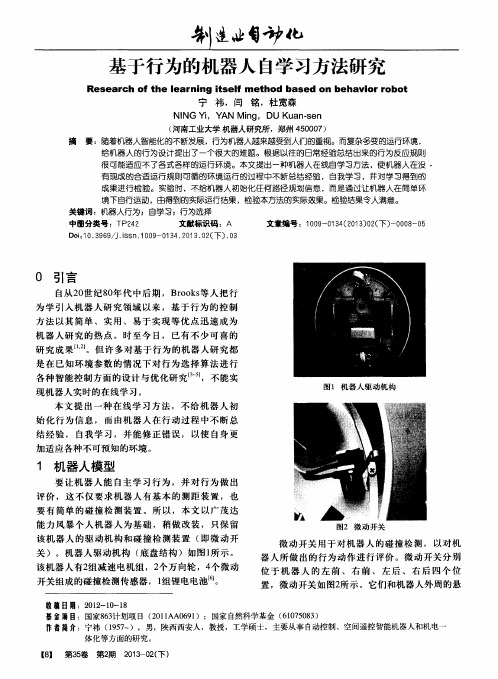

机械狗机器人原理
机械狗机器人是一种基于机器人技术的智能玩具,它能够模拟真实狗的行为,比如走路、摇尾巴、跳跃等等。
这种机器狗的原理是基于机器人控制系统和传感器技术。
它通常由电机、伺服电机、传感器、控制芯片和电源等组件构成。
机器狗机器人最关键的部分是控制芯片和传感器。
控制芯片是机器狗的智能核心,它能够处理输入的控制信号,并根据信号控制机器狗的动作。
传感器则能够感知外部环境的变化,比如测量机器狗的加速度、姿态、距离等等,从而控制机器狗的运动。
机器狗机器人的运动是通过电机和伺服电机来实现的。
电机负责驱动机器狗的运动,比如前进、后退、左转、右转等等。
而伺服电机则负责控制机器狗的头部和尾巴的运动,以实现摇头、摇尾巴等动作。
机器狗机器人的能力还可以通过添加其他功能模块来扩展,比如增加声音传感器和扬声器,可以让机器狗发出不同的声音,增强互动性。
还可以添加摄像头和图像处理芯片,实现机器狗的视觉功能,从而更好地感知外部环境。
总之,机器狗机器人的原理是基于机器人控制系统和传感器技术,通过控制芯片、传感器、电机和伺服电机等组件实现动作控制和运动。
随着技术的不断进步,机器狗机器人的功能将会越来越强大,将成为越来越多人们的智能玩具。
- 1 -。

机器人的行为决策在科技的高速发展下,机器人在日常生活中扮演着越来越重要的角色。
然而,机器人与人类的行为决策存在着本质的差异。
本文将探讨机器人的行为决策及其影响。
一、机器人的决策模式机器人的行为决策是通过程序和算法进行的。
与人类相比,机器人在决策时更依赖于事先设定的规则和指令。
机器人可以通过感知和识别环境中的数据,然后基于预设的程序进行决策操作。
机器人的决策模式通常包括以下几个方面:规则式决策、学习式决策和演化式决策。
1. 规则式决策:机器人通过事先设定的规则和逻辑进行决策。
这种决策模式在操作中具有可控性和精确性,但对于复杂的环境和情况适应性较低。
2. 学习式决策:机器人通过学习算法和数据分析来改进自身的行为决策能力。
通过与环境的交互,机器人能够不断调整和改进自身的决策模式。
3. 演化式决策:机器人通过进化算法和遗传算法进行行为决策。
这种决策模式类似于生物进化过程,机器人通过不断演化和优胜劣汰来提高自身的决策能力。
二、机器人行为决策的影响1. 精确性和效率:机器人的行为决策基于事先设定的规则和算法,具有精确性和效率的优势。
机器人可以根据环境和任务要求进行快速准确的决策操作,提高工作效率和执行能力。
2. 缺乏灵活性:机器人的决策是基于固定的规则和算法进行的,对于复杂和多变的情况缺乏灵活性。
机器人在未经过充分训练和预测的情况下难以做出适应性较强的决策。
3. 难以处理道德和伦理问题:机器人的决策是基于程序和算法,对于道德和伦理问题缺乏主观判断能力。
在一些特定情况下,机器人可能无法做出符合伦理标准的决策,引发一系列争议和讨论。
三、机器人行为决策的前景与挑战1. 前景:随着人工智能和机器学习技术的不断发展,机器人的行为决策能力将不断提高。
未来的机器人可能通过实时学习和强化学习算法,逐渐具备适应性和灵活性,更好地融入人类社会。
2. 挑战:机器人行为决策带来的挑战包括算法的优化、数据的收集和处理、法律和道德规范等方面。
智能机器人的原理与应用智能机器人的原理智能机器人是一种能够模拟或仿真人类思维和行为的机器设备。
它的原理基于人工智能(Artificial Intelligence,AI)技术以及机器学习(Machine Learning)算法。
智能机器人的原理可以归纳为以下几个方面:1.感知与感知处理:智能机器人具备各种感知能力,可以通过传感器获取外部环境的信息,如视觉、听觉和触觉等。
感知处理是对这些信息进行处理和分析,以便机器人能够理解所处环境。
2.人工智能算法:智能机器人使用多种人工智能算法,如机器学习、深度学习和神经网络等。
这些算法可以让机器人通过数据学习和模式识别,从而能够做出智能的决策和行动。
3.知识表示与推理:智能机器人需要具备知识表示和推理的能力。
它可以通过知识库和逻辑推理等方法,根据先前获得的经验和知识做出合理的决策和行动。
4.交互与自然语言处理:智能机器人可以与人类进行交互,并能够理解和处理自然语言。
它能够通过语音识别和自然语言处理技术,与人类进行对话和交流。
智能机器人的应用智能机器人已经在各个领域得到广泛应用,以下是一些典型的应用场景:1.工业制造:智能机器人在工业制造中扮演着重要角色。
它们可以代替人类完成重复性、危险或高精度的工作。
例如,装配线上的机器人可以快速、准确地组装产品,提高生产效率和质量。
2.医疗护理:智能机器人在医疗护理领域有广泛应用。
它们可以协助医生进行手术、药物分配和患者监护等工作。
智能机器人还可以提供定制化的医疗服务,如康复训练和老人照护等。
3.服务行业:智能机器人在服务行业中能够提供各种便利和支持。
例如,酒店和餐馆可以使用智能机器人进行服务和接待,大大减少人力成本。
智能机器人还可以在家庭中提供家政服务,如打扫卫生、搬运物品和做饭等。
4.教育和娱乐:智能机器人在教育和娱乐领域有着广泛应用。
它们可以作为教育辅助工具,帮助教师进行教学和批改作业。
智能机器人还可以作为娱乐设备,为用户提供娱乐活动,如语音助手、智能玩具和虚拟现实游戏等。
包 装 工 程 第43卷 第2期90 PACKAGING ENGINEERING 2022年1月收稿日期:2021-11-01基金项目:教育部人文社会科学研究规划基金(19YJC760075)作者简介:于入洋(1996—),男,河南人,湖南大学硕士生,主攻智能产品设计,用户体验。
通信作者:何人可(1958—),男,湖南人,硕士,湖南大学教授,主要研究方向为工业设计史,设计管理。
基于用户行为的扫地机器人APP 体验优化方法研究于入洋,王江涛,何人可,马超民(湖南大学,长沙 410082)摘要:目的 通过对家用情境下用户使用扫地机器人的行为分析获取用户各项需求被满足情况,从而有针对性地制定扫地机器人交互体验优化策略,提升用户交互体验。
方法 首先,基于桌面研究、清洁行为观察分析等方法得到家用扫地机器人APP 现有功能与用户潜在需求功能,通过KANO 模型对功能集进行优先层级排序;然后,对现有功能中优先级较高的进行可用性水平测试,并针对可用性不足的功能进行情境下交互行为分析,挖掘扫地机器人APP 现有功能中影响交互体验的具体问题。
从而形成交互体验优化策略并通过设计实践案例进行有效性验证。
结果 优化后的扫地机器人APP 可用性因子有不同程度的提高,证明了方法的有效性。
结论 该方法可以帮助开发者科学、高效、准确地选择产品功能优化对象,并系统地获取用户在与扫地机器人交互中的不足,辅助扫地机器人交互迭代设计,提升用户体验。
关键词:行为分析;扫地机器人;交互体验;需求分析;可用性量化中图分类号:TB472 文献标识码:A 文章编号:1001-3563(2022)02-0090-08 DOI :10.19554/ki.1001-3563.2022.02.012Application Experience Optimization of Sweeping Robot Based on User BehaviorYU Ru-yang , WANG Jiang-tao , HE Ren-ke , MA Chao-min(Hunan University, Changsha 410082, China)ABSTRACT: To obtain the satisfaction of the user's various needs through the analysis and research on the behavior of the user using the sweeping robot in the home situation,, so as to formulate the interactive experience optimization strat-egy of the sweeping robot and improve the user's APP interactive experience. First, based on methods such as desktop re-search, cleaning behavior observation, etc., the existing functions of the household sweeping robot APP and the potential user requirements were obtained, and the function set was prioritized through the KANO model; then, the higher priority of the existing functions was performed Usability level test, and conduct contextual interaction behavior analysis for functions with insufficient usability, and explore specific issued affecting the interactive experience in the existing func-tions of the sweeping robot APP. So as to form an interactive experience optimization strategy and verify its effectiveness through design practice cases. The availability factor of the optimized sweeping robot APP had been improved to varying degrees, which proved the effectiveness of the method. This method can help developers to scientifically, efficiently and accurately select product function optimization objects, and systematically obtain users' shortcomings in the interaction with the sweeping robot, assisting the iterative design of sweeping robot interaction, and improving user experience. KEY WORDS: behavior analysis; sweeping robot; interactive experience; demand analysis; usability quantification扫地机器人是集多种功能于一体的智能时代产物,旨在解决用户多样化清洁需求,产品每项功能都是用户在使用该产品时的需求解决方案。
机器人的主动感知与行为学习随着技术的不断进步和人们对机器人的需求增加,机器人逐渐成为人们生活中不可或缺的一部分。
机器人的主动感知和行为学习成为机器人能够与人类交互、服务人类、完成任务的关键。
本文将对机器人的主动感知和行为学习进行探讨,并分析其在未来的应用前景。
一、机器人的主动感知机器人的主动感知是指机器人通过内部或外部传感器感知周围环境,进而主动采取行动。
机器人的主动感知可以基于视觉、听觉、触觉、射频识别等多种方式。
通过传感器获取的信息包括环境中的物体、人、气味、声音、温度、亮度等等。
机器人通过主动感知,可以提高它对环境的认知能力,使其可以更加准确地进行工作和任务。
机器人的主动感知在各行各业都有应用。
在医疗领域,机器人可以通过射频识别技术,感知病人的脉搏和体温,及时报告护士站。
在制造业中,机器人可以通过视觉传感器,实现零件的精确组装,提高生产效率。
通过主动感知,机器人可以更好地完成任务,并为人们节约时间和精力。
二、机器人的行为学习机器人的行为学习是指机器人能够通过不断地学习不同的行为和任务,以适应不同的环境和任务需求。
机器人的行为学习可以通过监督学习、无监督学习、强化学习等多种方法实现。
机器人的行为学习可以进一步提高机器人的智能化水平,使其能够更好的应对新环境和任务。
机器人的行为学习在各行各业都有广泛应用。
在教育领域中,机器人可用于学生行为的监测和数据收集,为教师提供更好的学生指导方案。
在金融领域中,机器人可以通过学习客户喜好和需求,为客户提供更个性化的投资服务。
机器人的行为学习可以让机器人逐渐适应不同领域的应用需求,为人们带来更多便利。
三、机器人的主动感知与行为学习的未来机器人的主动感知与行为学习是机器人智能化的重要组成部分。
未来,随着技术的不断进步和人们对机器人需求的增加,机器人的主动感知和行为学习将会得到更广泛的应用。
在医疗领域中,机器人将会变得更加智能和自主,在协助医生进行手术和监控病情等方面会变得更加精准和高效。
基于模糊逻辑的机器人行为控制研究一、引言随着科技的飞速发展,机器人在各个领域的应用日益广泛,从工业生产到医疗服务,从太空探索到家庭生活。
机器人的行为控制成为了关键的研究课题,如何使机器人能够更加智能、灵活地适应复杂多变的环境和任务需求,是摆在研究者面前的重要挑战。
模糊逻辑作为一种处理不确定性和模糊性的有效工具,为机器人行为控制提供了新的思路和方法。
二、模糊逻辑的基本概念模糊逻辑是一种基于模糊集合理论的逻辑系统,与传统的布尔逻辑不同,它允许变量具有模糊的取值范围和隶属度。
在模糊逻辑中,一个概念不再是绝对的“是”或“否”,而是可以用一定程度的隶属度来表示。
例如,“速度快”这个概念可以用 0 到 1 之间的数值来表示不同的速度对“速度快”的隶属程度。
模糊逻辑的核心概念包括模糊集合、隶属函数和模糊推理。
模糊集合是对传统集合的扩展,它的元素具有不同的隶属度。
隶属函数用于定义元素对模糊集合的隶属程度,常见的隶属函数有三角形、梯形、高斯型等。
模糊推理则是根据已知的模糊规则和输入的模糊信息,得出模糊的输出结果。
三、机器人行为控制的需求与挑战机器人在实际应用中面临着各种各样的环境和任务,这些环境和任务往往具有不确定性和复杂性。
例如,在家庭服务机器人中,机器人需要根据不同的房间布局、家具摆放和人的行为来进行合理的移动和操作;在工业生产中,机器人需要适应不同的产品规格和生产流程的变化。
传统的机器人行为控制方法通常基于精确的数学模型和预设的规则,但这些方法在处理不确定性和模糊性时往往显得力不从心。
机器人可能会因为环境的微小变化或者传感器的误差而出现错误的行为,导致任务失败或者造成安全隐患。
因此,需要一种更加灵活和智能的控制方法,能够处理不确定性和模糊性,适应复杂多变的环境和任务。
四、模糊逻辑在机器人行为控制中的应用(一)传感器数据融合机器人通常配备了多种传感器,如视觉传感器、距离传感器、力传感器等。
这些传感器提供的信息往往存在噪声和不确定性。