交流伺服电机接线原理图
- 格式:ppt
- 大小:21.50 KB
- 文档页数:1

创作编号:BG7531400019813488897SX创作者:别如克*伺服电机内部结构伺服电机工作原理伺服电机原理一、交流伺服电动机交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。
目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。
当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
2、运行范围较广3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。

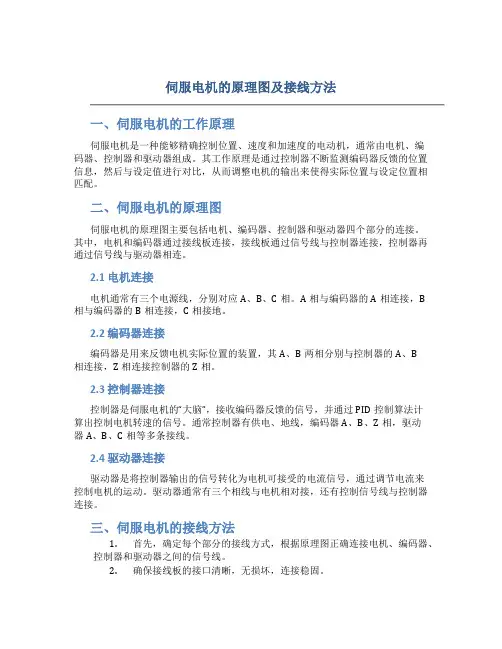
伺服电机的原理图及接线方法一、伺服电机的工作原理伺服电机是一种能够精确控制位置、速度和加速度的电动机,通常由电机、编码器、控制器和驱动器组成。
其工作原理是通过控制器不断监测编码器反馈的位置信息,然后与设定值进行对比,从而调整电机的输出来使得实际位置与设定位置相匹配。
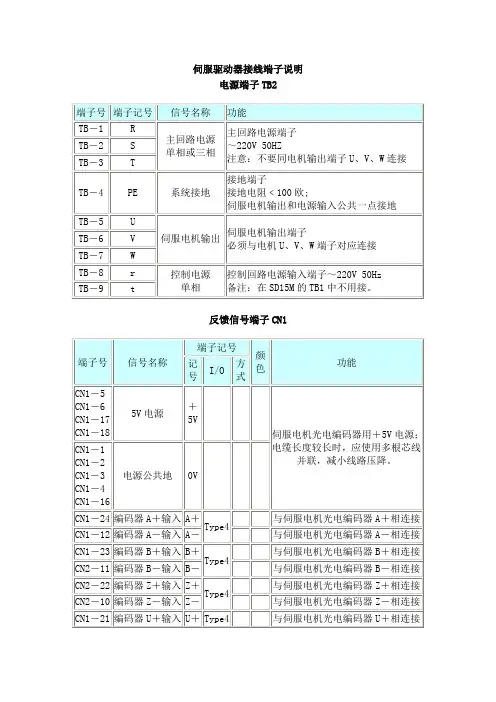
二、伺服电机的原理图伺服电机的原理图主要包括电机、编码器、控制器和驱动器四个部分的连接。
其中,电机和编码器通过接线板连接,接线板通过信号线与控制器连接,控制器再通过信号线与驱动器相连。
2.1 电机连接电机通常有三个电源线,分别对应A、B、C相。
A相与编码器的A相连接,B相与编码器的B相连接,C相接地。
2.2 编码器连接编码器是用来反馈电机实际位置的装置,其A、B两相分别与控制器的A、B相连接,Z相连接控制器的Z相。
2.3 控制器连接控制器是伺服电机的“大脑”,接收编码器反馈的信号,并通过PID控制算法计算出控制电机转速的信号。
通常控制器有供电、地线,编码器A、B、Z相,驱动器A、B、C相等多条接线。
2.4 驱动器连接驱动器是将控制器输出的信号转化为电机可接受的电流信号,通过调节电流来控制电机的运动。
驱动器通常有三个相线与电机相对接,还有控制信号线与控制器连接。
三、伺服电机的接线方法1.首先,确定每个部分的接线方式,根据原理图正确连接电机、编码器、控制器和驱动器之间的信号线。
2.确保接线板的接口清晰,无损坏,连接稳固。
3.接线完成后,检查每个部分的接口是否牢固,信号线是否接错。
4.打开控制器电源,按照调试程序进行测试,观察电机的运动是否符合设定值。
四、总结伺服电机通过精确的控制算法实现了高精度的位置控制,其原理图及接线方法是确保电机正常运行的关键环节。
正确理解和掌握伺服电机的工作原理,能够帮助工程师更好地设计和维护伺服系统。


深圳市雷地 址:深邮 编:5电 话:0传 真:0Email :in 网 址:w上海办事地 址:上7电 话:0传 真:0美国雷赛Address :RochesterTel :1-24雷赛智能控制股份有深圳市南山区登良路25518052 0755-********(20线) 0755-******** nfo@ 事处 上海市淞江区九亭镇九76号嘉和阳光大厦9021-64327322/64853687021-64327323 赛科技公司 630Parkland Dive r Hills , Mi48307 USA48-608-6388有限公司 5号天安南油工业区二 九新公路楼7A二幢三楼北京办事处地 址:北京市优士阁 电 话:010-58传 真:010-58香港雷赛科技 地 址:沙田火华乐工电 话:852-29852-29市朝阳门广渠门外大街阁B 座308室8614491 8614490技公司火炭山尾街 31-41号 工业中心 E 座 9 字楼952 9114952 93958号 3 室【使i 一体伺使用版权所用前请仔细阅读深圳市雷SV57服驱动用说明书有 不得翻印本手册,以免损雷赛智能控制电机书坏驱动器】制股份有限公公司一、1、2、3、二、1.2.3.4.三、1. 2.3.4.5.四、五、六.七、 iSV52电、产品简介 ..........概述 ....................技术特点 ............ 应用领域 ..........、电气、机械和环电气指标 ............使用环境及参数机械安装尺寸图加强散热方式 ....、驱动器接口与接接口定义 .............控制信号接口电控制信号时序图控制信号模式设串口接线 ............、拨码开关设定 ..、驱动器参数设置.典型接线图 ......、雷赛产品保修条7一体伺服驱动电机电话:0755-********目录........................................................................................................................环境指标 .....................................................................................................................................接线介绍 .............................................路图 ..................................................置 .....................................................................................置 .........................................................条款 .......................机用户手册Version 1.(20线) 录........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................0A 网址:www.leiSai ....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... .com (2)...... 2 ...... 2 ...... 3 ...... 3 ...... 3 ...... 3 ...... 3 ...... 4 ...... 4 ...... 4 ...... 5 ...... 6 ...... 6 ...... 6 ...... 6 ...... 7 ...... 7 (8)一1流了一器采一术2 iSV 电话:0一、 产品简介 、概述基于多年低压流伺服电机与驱动了最新专用电机控一种高性价比的伺器与电机集成一体采用了更优抗震动一款更适合中国国术思路和方向。
交流伺服电动机原理?伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度(线数)。
伺服电动机在伺服系统中控制机械元件运转的发动机.是一种补助马达间接变速装置。
又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,作用:伺服电机,可使控制速度,位置精度非常准确。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快速降低。
因而适合做低速平稳运行的应用。
伺服电动机基本知识讲解伺服电动机伺服电动机又叫执行电动机,或叫控制电动机。
在自动控制系统中,伺服电动机是一个执行元件,它的作用是把信号(控制电压或相位)变换成机械位移,也就是把接收到的电信号变为电机的一定转速或角位移。
其容量一般在0.1-100W,常用的是30W以下。
伺服电动机有直流和交流之分。
一、交流伺服电动机交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似,如图1所示。
其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。