现代控制理论 线性时变系统的解PDF版
- 格式:pdf
- 大小:478.59 KB
- 文档页数:9


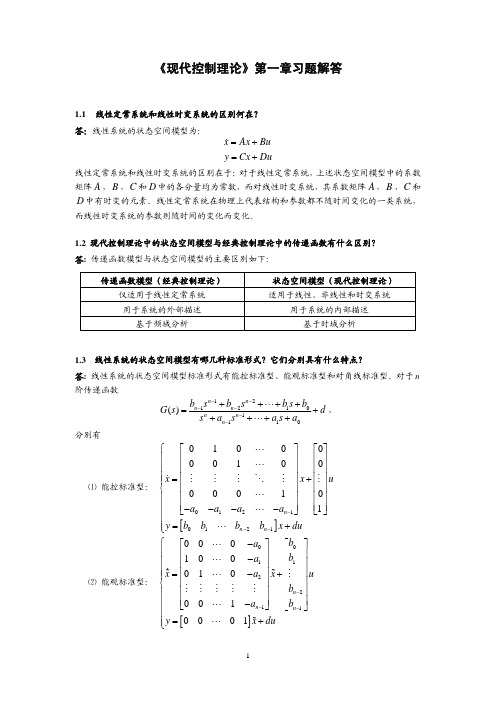
《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。

现代控制理论试题B 卷及答案一、1 系统[]210,01021x x u y x ⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦能控的状态变量个数是cvcvx ,能观测的状态变量个数是。
2试从高阶微分方程385y y y u ++=求得系统的状态方程和输出方程(4分/个)解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。
状态变量个数是2。
…..(4分)2.选取状态变量1x y =,2x y =,3x y =,可得 …..….…….(1分)12233131835x x x x x x x u y x ===--+= …..….…….(1分)写成010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦…..….…….(1分)[]100y x = …..….…….(1分)二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。
(3分)2已知系统[]210 020,011003x x y x ⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?(5分)解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。
若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
…..….…….(3分) 2.[][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分)[][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=940320110 2CA CA C U O ………………..……….(1分) rank 2O U n =<,所以该系统不完全能观……..….…….(2分)三、已知系统1、2的传递函数分别为2122211(),()3232s s g s g s s s s s -+==++-+求两系统串联后系统的最小实现。

第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
用矩阵指数法解状态方程的MATLAB函数vslovel:函数vslovel:求解线性定常连续系统状态方程的解function [Phit z PhitBu]=vsolvesl(A,B,ut)%vsolvesl求线性连续系统状态方程X^AX+Bu的解%[Phit,phitBu]=vsolvesl(A,B,ut)%A,B系数矩阵%ut控制输入,必须为时域信号的符号表达式,符号变量为t%Phit——输出Phi(t)%P hitBu ------ 输出phi (t-tao)*B*u(tao)在区间(0, t)的积分syms t ta o %定义符号变量t,taoPhit=expm(A*t);%求矩阵指数exp(At)if (B==0)B=zeros(size(A J)J);%重构系数矩阵Bendphi=s ub(Phit/t7t-tao z);%求e xp[A(t-tao)]PhitBu=int(p hi*B*ut/tao 求exp[A(t -tao)]*B*u(t ao)在0~t 区间的积分用拉氏变换法解状态方程的MATLAB函数vslo ve2:函数vslove 2:求解线性定常连续系统状态方程的解functi on [sl_A,sl_ABu]=vsolves l(A,B,us)%vs olves2求线性连续系统状态方程X^AX+B u的解%[sl_A,sl _ABu]=vsolve sl(A,B,ut)%A,B系数矩阵%us控制输入,必须为拉氏变换后的符号表达式,符号变量为s%sl_A——输出矩阵(s l-A)A(-l)拉式反变换的结果%sl_ABu——输出(sl-A)"-l)*B*u(s)拉式反变换后的结果syms s %定义符号变量t,taoAA=s*eye(siz e(A))-A;%求sl-AinvAA=inv(AA );%求(sl-A )矩阵的逆intAAtA A=ilaplace(i ntAA) ;%求intA A 的拉氏反变换sl_A=simplify;%简化拉式反变换的结果if (B==0)B=zeros(siz e(A,l)J);%重构系数矩阵BendtAB=ilaplace(int AA*B*us) ;%求intAA *B*us 的拉氏反变换s l_ABu=simpli fy(tAB);%化简拉式反变换的结果求解时变系统状态方程的MATLAB函数tslove:函数ts love:求解线性时变连续系统状态方程的解fun ction [Phi,P hiBu]=tsolve s(A z B,u,x z a,n)%tsolves求吋变系统状态方程%[Phi ,phiBu]=vsol vesl(A,B,u z x ,a,n)%A,B时变系数矩阵%Phi——状态转移矩阵计算结果%PhiB u——受控解分量%u——控制输入向量,吋域形式%x一一符号变量,指明矩阵A中的时变参数,通常为时间t%a一一积分下限%n ——时变状态转移矩阵屮计算重积分的最大项数,n=0时无重积分项% n=l时包含二重积分项,.....Phi=trans mtx(A,x,a,n);%计算状态转移矩阵P hitao=subs(P hi,x,'tao');%求Phi(tao)讦(B==0)Bt ao=zeros(siz e(AJ),l);%求B(tao)endutao=subs(u,x/ta o');%求u(ta o)PhiBu=simp le(int(Phita o*Btao*utao/taoSa,x));%计算受控分量求解时变系统转移矩阵的MA TLAB函数transm tx:函数transmt x:求解线性时变系统状态转移矩阵function Phi=transmt x(A,x,a,n)%t ransmtx计算时变系统状态转移矩阵%Phi=transmtx(A,x ,a z n)%Phi一一状态转移矩阵计算结果%A时变系数矩阵%x——符号变量,指明矩阵A屮的时变参数,通常为时间t%a ——积分下限%n——吋变状态转移矩阵中计算重积分的最大项数,n=0吋无重积分项 % 时包含二重积分项,••…P hi=eye(size(A));%初始化Phi=lfor Io p=0:nAA=A;for i=l:lop讦(AA==0)break;endAtemp=subs(A A,x,'taoi');AA=sim plify(A*int(Atemp/tao\a,x));endif (AA==O)break;endAte mp=subs(AA,x /taoi');AA=simplif y(A*int(Atem p,'tao',a,x)); %计算重积分Phi=sim plify(Phi+AA );%修正Phiend求解线性定常离散系统状态方程的MA TLAB函数disolv e:函数disolve:求解线性定常离散系统状态方程的解function [Ak,AkBu]=d isolve(A,B,u z)%disolve求线性离散系统状态方程x(k+l)=Ax(k)+B u(k)的解%[Ak,A kBu]=disolve (A,B,uz)%A,B系数矩阵%uz控制输入,必须为Z变换后的符号表达式,符号变量为z%A k——输出矩阵[((zl -A)A(-l)z]Z反变换后的结果%AkBu——输出矩阵[((zl-A )A(_I)*B*U(Z )]Z反变换后的结果sy ms z %定义符号变量zA A=z*eye(size (A))-A;%求zl-Ai nvAA=inv(AA);%求(zl-A)矩阵的逆intAAtAA =iztrans(int AA*z) ;%求intAA *z 的Z 反变换Ak=si mple(tAA);%简化Z反变换的结果if (B==0)B二zeros⑸ze(AJ)J);%重构系数矩阵BendtAB=izt rans(intAA*B *uz) ;%求intAA*B*u z 的Z 反变换AkBu=s imple(tAB);%化简Z反变换的结果求解线性时变离散系统状态方程的MATLAB函数tds olve:函数tdsol ve:求解线性时变离散系统状态方程的解funct ion xk=tsol ve(Ak,Bk,uk,xO,kstart,ke nd)%tdsolve求线性时变离散系统状态方程x(k+l)=A(k)x(k)+B(k)u(k啲解%xk=tsolv e(Ak,Bk,uk,x O,kstart,ken d)%Ak,Bk系数矩阵%uk控制输入,必须为时域符号表达式,符号变量为k%x0初始状态%kstart——初始时刻%kend——终止吋刻%xk一一输出结果,矩阵每一列分别对应x(k 0+l),x(k0+2)….syms k %定义符号变量kif (B k==0)Bk=z eros(size(AJ)J);%重构系数矩阵Bendxk=[];for kk=kst art+1: kendAA=ey e(size(k));for i=kstart:kk-1 %计算A (k-l)A(k-2)....A(kO+l)A(kO)A=subs (Ak/k'J);AA=A*AA;en dAAB=eye(siz e(Ak));BB=ze ros(size(Bk));for i=kk-l :-l:kk+l %计算A(k-l)A(k-2)....A(j+l)B(j)u(j)的累加和A=subs(Ak,‘k;i);AAB=AAB*A;B =subs(Bk/k\kk-l+i+ksta rt);u=subs (uk/k^kk-l +i+kstart);BB=BB+AAB*B *u;endB=subs(Bk/k\kk-l);u=su bs(uk,'k:kk -1);BB=BB+B*u;xk=[xk AA*xO+BB];%计算x(k)end连续系统状态方程离散化的MAT LAB符号函数sc2d:函数sc2d:线性连续系统状态方程的离散化f unction [Ak,Bk]=sc2d(A,B )%sc2d离散化线性连续系统状态方程X^AX+Bu%sysd=s c2d(A,B)%A,B——连续系统的系数矩阵%Ak,Bk ——离散系统系数符号矩阵%离散状态方程为:x(k+l)=Ak*x(k)+Bk*u(k)%Ak,Bk中变量T为采样周期syms t T %定义符号变量tTPhit=expm(A*t);%求矩阵指数exp(At)if (B==0)B=zeros(s ize(AJ)J);%重构系数矩阵BendPhi tB=int(Phit*B;t:O,T); %求e xp(At)*B 在0~T 区间的积分Ak=si mple(subs(Ph it,'t:T));Bk=simple(P hitB);线性时变系统离散化的MATLAB函数tc2d:函数tc2d :线性吋变系统的离散化function [Ak ,Bk]=tc2d(A,B,x,n)%tc2d线性时变系统的离散化%[Ak,Bk]=tc2d (A z B z x,n)%A,B——连续系统的系数矩阵%Ak ——离散化后的系数矩阵A(kt)%B k 一一离散化后的系数矩阵B(kt)%x 一一符号变量,指明矩阵A \B中的时变参数,通常为时间t%n ——时变状态转移矩阵中计算重积分的最大项数,n=0时无重积分项, %n=l时包含二重积分项,.....syms t TPhit=tra nsmtx(A,x,k*T,n);%计算时变系统的状态转移矩阵Ak=simpli fy(subs(Phi,x,(k+l)*T));%计算离散化后的系数矩阵A(kT)Phitao =subs(Phi,x/tao,);%求Phi(t ao)if (B==0)Btao=zero s(size(AJ),l);elseBtao =subs(B,x/t ao');%求B(tao)e ndPhitB=simp le(int(Phita o*Btao/tao,k*7;x,));%计算受控分量Bk=simplify (subs(PhiB,x ,(k+l)*T));%计算离散化后的系数矩阵B(kT)定常系统可控规范I型变换函数ccano nl:函数ccanonl :求线性定常系统的町控规范I型形式functi on [Abar.Bba r,Cbar,T]=cc anonl(A,B,C)%ccanonl求系统X^AX+Bu, y=Cx的可控规范I型系数矩阵%Abar/Bbar,Cbar/——变换后的可控规范I型系数矩阵%T 一一相似变换矩阵n=len gth(A);Co=ct rb(A,B);if (rank(Co)~=n),%判断系统可控性errorC系统不可控!J;endR s=sym(polymt x(A));%计算R矩阵并转变为符号矩阵Rs形式As=sym(A);%讲矩阵A 转变为符号矩阵AsBs=s ym⑻;%讲矩阵B转变为符号矩阵BsTs=Bs;fo r i=l:n-l zTs=[As A i*BsTs];endTs =Ts*Rs;%计算相似变换符号矩阵TsAbar=n umeric(inv(T s)*As*Ts);%实现矩阵A的相似变换并转变为数值形式Bbar=numeric(i nv(Ts)*Bs);%实现矩阵B的相似变换并转变为数值形式Cbar=numer ic(inv(C)*Ts ); %实现矩阵C的相似变换并转变为数值形式T=nume ric(Tc);%相似变换矩阵T转变为数值形式求系统相似变换的R矩阵函数polymt x:函数polymtx:求系统相似矩阵变换的R矩阵function R =polymtx(A)%R=polymtx(A) ------- A 须为方针%[10 0 0]% [a(n-l) 10 0]% R= [a(n-2) a(n-l) 0 0][•・♦••••.. •••]% [a (2) a(3)l 0]% [a(l ) a(2)a(n-l) 1]%英中a(i)(i=l z...n-l)^J矩阵A的特征多项式%|s*l-A|=s A n+a(n-1 )*s A(n-l)+...+a(l)*s+a(0)%的各项系数d=siz e(A);if (len gth(d)~=2),%判断系统可控性errorf错误:非二维矩阵!9;endif (d(l)-=d (2)),%判断系统可控性error (,错误:A非方针!endn=d(l);A s=sym(A);p=s ym2poly(poly (As));R=[];f or i=l:nR=[R P(l:nH;P=[o p(l:n)[;en dR二numeric(R );线性定常系统可控分解函数cdecomp:函数cdecomp:线性定常系统的可控性分解fun ction [Abar/Bbar z Cbar,P]=cdecomp(A,B ,C)%cdecomp可控性分解%[Abar,Bbar/Cbar,P]=cdecomp(A z B ,C)%若系统不完全可控,则存在相似变换矩阵P,使得% -1 ・:!%Abar=P*A*P/Bbar=P*B, Cb ar=C*P%其中%Ab ar=|Ac A121 ,Bbar= | Be |z Cbar= |Cc Cu c||0 Auc| |0|%(Ac,Bc)构成系统的可控子空间As =sym(A); %转变为符号矩阵求解Bs=sym(B);Cs=sym(C);nA=size(A s,l);Ms=sym(ctrb(As,Bs));%求可控性矩阵Mn二nume ric(rank(IVIs));P二[];%系统不可控,计算变换矩阵Pi=l;while nume ric (rank(P)%取M的n个线性无关列矢量至P矩阵P=[P Ms (:J)]; if (numeric(e(P,2)),P (:,size (P,2))=[];endi=i+l;endE=s ym(eye(size(A)));i=l;w hile numeric A,%収某一单位向量至P阵使P满秩P=[P E(:,i)];if (n umeric(rank()),P (:,size(P,2))=[];e ndi=i+l;endelseP =ey&size(A));%若系统可控,取P=1endAbar=num enc(inv(P)*A*P);%转变为数值矩阵输岀Bbar =numeric(inv (P)*B);Cbar二nume ric(inv(C*P));P 二numeric(P);线性定常系统可观分解函数odecomp:函数odecomp:线性定常系统的可观性分解f unction [Aba r,Bbar,Cbar/P]=odecomp(A ,B,C)%odecom p可控性分解%[Abar,Bbar,Cbar,P ]=odecomp(A,B,C)%若系统不完全可观,则存在相似变换矩阵P,使得%-1 J%Abar=P*A*P,Bbar=P*B z C bar=C*P%其中%A bar=|Ao 0| /Bbar=|B o |,Cbar=|Co 0|| A 21 Ano||Bno|%(A o,Bo)构成系统的可观子空间%根据对偶原理,应用可控性分解函数cdec omp实现可观性分解[a bar,bbar,cba r,P]二cdecomp (A:B'C);A bar=abar,;B bar=cbar';C bar=bbar z;。
《现代控制理论》MOOC课程
2.4 线性时变系统的解
2.3 线性时变系统的解
一. 时变系统状态方程解的特点
对于线性时变系统的状态空间表达式可以表示为:
x =A (t )x +B (t )u ,x t 0=x 0,t ∈[t 0,t ∝]y =C (t )x +D (t )u
为了求解时变系统的状态方程,先讨论一个时变的标量方程:
x =a (t )x
解:
dx x
=a (t )dt
lnx t −lnx(t 0)=නt 0
t
a (τ)dτ
对上式两边从到积分:t 0t x t =e
t 0
t a (τ)d τ
x(t 0)
可得:ln
x t
x(t 0)
=නt 0
t
a (τ)dτ
2.3 线性时变系统的解
一. 时变系统状态方程解的特点
左边=x =
d dt
(e t 0
t A τ
dτx(t 0))=d dt
(e t 0
t A τdτ
)x(t 0)
=d dt (I +නt 0
t
A τdτ+1
2!
නt 0
t A τdτනt 0
t
A τdτ+⋯)x(t 0)=(A t +12A t නt 0
t A τdτ+1
2
(නt 0
t
A τdτ)A t +⋯)x(t 0)
=A (t )x 右边=A (t )e
t 0
t A τdτ
x(t 0)
=A (t )(I +
t 0
t
A τdτ
+12!t 0
t
A τ
dτt 0
t
A τdτ+⋯)x(t 0)
齐次方程解为成立的条件。
x(t)=e t 0
t
A τdτ
x(t 0)x =A t x
2.3 线性时变系统的解
一. 时变系统状态方程解的特点
左边=(A t +12A t නt 0
t A τdτ+1
2
(නt 0
t
A τdτ)A t +⋯)x(t 0)
右边=(A t +A t නt 0
t
A τdτ+1
2!
A t නt 0
t
A τdτනt 0
t
A τdτ+⋯)x(t 0)
仅当A t නt 0
t
A τdτ=(නt 0
t
A τdτ)A t
时x =A t x
即方程解为:x(t)=e
t 0
t
A τdτ
x(t 0)成立的条件为:A t නt 0
t
A τdτ=(නt 0
t
A τdτ)A t
这个条件通常是不成立的。
因此,时变系统的自由解通常不能写成封闭形式。
2.3 线性时变系统的解
二. 线性时变系统的零输入响应
线性时变系统在零输入情况下,状态方程
x =A t x
ȁx(t)t=t 0=x(t 0)
的解可表示为x t =Φ(t,t 0)x(t 0)
其中,称为线性时变系统的状态转移矩阵,是如下矩阵方程的解:
Φ(t,t 0)Φ(t,
t 0)=A (t)Φt,t 0,Φt 0,t 0=I ,t ≥t 0证明:将代入方程可得:
x t =Φ(t,t 0)x(t 0)x =A t x Φ(t,
t 0)x(t 0)=A (t)Φt,t 0x(t 0)故
Φ(t,
t 0)=A (t)Φt,t 0由可得。
x t =Φ(t,t 0)x(t 0)x t 0=Φ(t 0,t 0)x(t 0)得证
Φt 0,t 0=I
故Φ(t
−t 0)=A Φt −t 0,Φt 0=I ,t ≥t 0
2.3 线性时变系统的解
三. 状态转移矩阵的性质
1. 传递性Φt2,t1Φt1,t0=Φt2,t0
2.可逆性Φ−1t,t0=Φt0,t
3. 初始时刻的状态转移矩阵Φt0,t0=I
4. 微分性Φ(t,t0)=A(t)Φt,t0
系统矩阵和状态转移矩阵通常不满足可交换条件。
5. 唯一性
当A(t)确定以后,是唯一的。
Φt,t0
2.3 线性时变系统的解
四.线性时变系统非齐次状态方程的解
证明:应用叠加定理,状态方程的解可以看作是初始状态的转移与控制激励状态的转移之
和,即设其解具有如下形式:
x t =Φ(t,t 0)x(t 0)+Φt,t 0x u t =Φ(t,t 0)(x(t 0)+x u t )且A(t)和B(t)的元素在时分段连续,则其解为:
t ∈[t 0,t α]x t =Φ(t,t 0)x(t 0)+
t 0
t
Φt,τB τu τdτ
结论:线性时变系统的状态方程为
x(t)=A (t )x (t )+B (t )u (t ),x t 0=x 0,t ∈[t 0,t α]
x =Φ(t,t 0)(x(t 0)+x u t )+Φ(t,t 0)x u t 左边==A (t)Φt,t 0(x(t 0)+x u t )+Φ(t,t 0)x u t
=A t x t +Φ(t,t 0)x
u t 右边=A (t )x (t )+B (t )u (t )
将代入系统的状态方程
x t
2.3 线性时变系统的解
因此,有Φt,t 0x u t =B (t )u (t )
x u t =Φ−1t,t 0B (t )u (t )
对方程两边在区间积分有[t 0,t ]x u t =නt 0
t
Φt 0,τB (τ)u (τ)d τ+x u t 0
于是有x t =Φ(t,t 0)x(t 0)+Φt,t 0x u t
=Φ(t,t 0)x(t 0)+Φt,t 0t 0
t
Φt 0,τB (τ)u (τ)d τ+Φt,t 0x u t 0
=Φ(t,t 0)
x(t 0)+t 0
t
Φt,τB (τ)u (τ)d τ+Φt,t 0x u t 0
由于通常情况下,封闭形式的状态转移矩阵很难求得,上式的意义不在于计算的应用,
令t =t 0
可得x u t 0=0x t =Φ(t,t 0)x(t 0)+
t 0
t
Φt,τB τu τdτ
故有
得证
而在于系统理论研究中的应用。
第二章控制系统状态空间表达式的解
第二章小结
推导建立了线性定常系统和线性时变系统状态方程的解析表达式:
x t =Φt −t 0x(t 0)+නt 0
t
Φt −τBu τdτ,
t ≥t 0x t =Φ(t,t 0)x(t 0)+
t 0
t Φt ,τB τu τdτ,
t ∈[t 0,t α]
状态转移矩阵的定义、性质和计算方法。
建立系统状态在状态空间中运动的基本概念。