科氏力推导
- 格式:pdf
- 大小:251.09 KB
- 文档页数:2

科氏力效应
摘要:
1.科氏力效应的定义
2.科氏力效应的产生原因
3.科氏力效应在现实生活中的应用
4.科氏力效应对人类生活的影响
5.科氏力效应的未来研究方向
正文:
科氏力效应,是指在旋转体系中,系统中的物体受到的一种惯性力。
这个力与物体的质量、旋转速度以及旋转半径有关。
科氏力效应在许多领域中都有应用,例如气象学、天文学、地球物理学等。
科氏力效应的产生原因主要来自于旋转体系对物体运动的影响。
当一个物体在一个旋转体系中运动时,旋转体系会对物体施加一个惯性力,这个力就是科氏力。
科氏力的方向垂直于物体的运动方向和旋转体系的旋转轴,大小与物体的质量、旋转速度以及旋转半径成正比。
在现实生活中,科氏力效应有许多应用。
例如,在气象学中,科氏力是大气环流和天气系统形成的重要原因之一。
在天文学中,科氏力是影响行星运动和星系结构的重要因素。
在地球物理学中,科氏力是地壳运动和地震产生的原因之一。
科氏力效应对人类生活也产生了重要影响。
例如,大气环流的形成和变化导致了天气的变化,影响了人类的农业生产和生活。
地球的自转和科氏力影响
了地球的形状,进而影响了地球的内部结构和地表形态。
未来,科氏力效应的研究方向将更加深入和广泛。




基于三角函数求导的科里奥利力表达式推导①杨照锐,何尚文*(郑州大学力学与安全工程学院,河南郑州450001)[摘要]理论力学中,科里奥利力是非常重要且相对抽象不容易理解的教学内容。
利用旋转坐标中做匀速直线运动物体的相对运动,通过向量在直角坐标系下的描述以及三角函数求导,用数学的概念描述了科里奥利力的产生,并根据向量方向的特征解释了科里奥利力方向的判断。
能够使学生更加清晰地认识科里奥利力的同时深度理解高等数学在实际力学中的应用,培养学生更加严密的数理逻辑能力。
[关键词]科里奥利力;动参考系;三角函数求导[中图分类号]G642[文献标志码]A[文章编号]2096-0603(2021)28-0068-02科里奥利力(下文简称科氏力)是当动参考系发生旋转的同时质点相对于动系有相对运动而产生的惯性力,它是大学物理和力学专业课程中的重要组成部分[1]。
在点的运动合成中,动系的转动且质点有相对速度的运动状态比动系平移的情况要复杂而抽象,学生往往难以理解。
同时科氏力方向的判断给很多学生造成很大的困扰[2]。
尽管对于科氏力在生活和工程中应用的探讨和研究有很多,但是用较为严密的数学理论对科氏力的产生进行推导的讨论尚不多见[3][4]。
基于此,本文通过使用大学数学中最基本的坐标变换和三角函数求导对科氏力的产生进行数学描述。
采用该方法的讲解能够加深学生对低年级阶段学习的高等数学在实际力学问题中应用的理解,更深入地理解科氏力。
一、旋转坐标系中匀速运动的物体运动方程图1中圆盘以匀角速度ω沿逆时针方向旋转,xy坐标系为惯性系,XY系为随圆盘一起转动的随体坐标系。
质量为m的物体不受任何外力的情况下在圆盘上做匀速直线运动,速度为v。
当物体的运动方向沿惯性系的y轴时,在xy坐标下该物体的位置向量r→和速度v→分别表示为r→=(0,y)(1)v→=(0,v y)=(0,dy dt)(2)同时,该物体的运动在随体坐标XY下的描述为R→=(X,Y)=(y sinθ,y cosθ)(3)xyvmωθy sinθy cosθOXY图1旋转坐标下物体的运动V→=(V X,V Y)=(dX dt,dY dt)(4)转角θ为圆盘转动角速度关于时间的函数(ωt),则V X=dX dt=d dt(y sinωt)由复合函数求导可得V X=v·sinωt+y·ωcosωt(5)同理V Y=v·cosωt+y·(-ωsinωt)(6)式(5)和式(6)整理可得V→=(V X,V Y)=(v sinωt+yωcosωt,v cosωt-yωsinωt)物体在旋转坐标系XY下的加速度能够通过对速度V→求导得到。
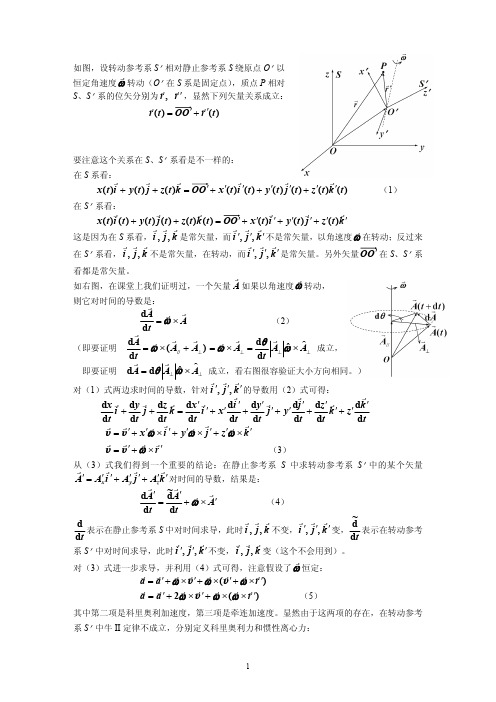
如图,设转动参考系S ′ 相对静止参考系S 绕原点O ′ 以 恒定角速度ωr 转动(O ′ 在S 系是固定点),质点P 相对 S 、S ′ 系的位矢分别为r r ′rr ,,显然下列矢量关系成立: )( )(t r O O t r ′+′=r r要注意这个关系在S 、S ′ 系看是不一样的:在S 系看: )()()()()()( )()()(t k t z t j t y t i t x O O k t z j t y i t x ′′+′′+′′+′=++r r r r r r (1) 在S ′ 系看: k t z j t y i t x O O t k t z t j t y t i t x ′′+′′+′′+′=++r r r r r r )()()( )()()()()()( 这是因为在S 系看,k j i r r r , ,是常矢量,而k j i ′′′r r r , ,不是常矢量,以角速度ωr 在转动;反过来在S ′ 系看,k j i r r r , ,不是常矢量,在转动,而k j i ′′′r r r , ,是常矢量。
另外矢量O O ′在S 、S ′ 系看都是常矢量。
如右图,在课堂上我们证明过,一个矢量A r 如果以角速度ωr 转动,则它对时间的导数是: A tA r r r ×=ωd d (2)(即要证明 )(d d //⊥+×=A A t A r r r r ω⊥⊥⊥×=×=A A t A )r r r ωθωˆd d 成立,对(1从(3)式我们得到一个重要的结论:在静止参考系S 中求转动参考系S ′ 中的某个矢量k A j A i A A z y x ′′+′′+′′=′r r r r 对时间的导数,结果是: A t A t A ′×+′=′r r r r ωd d ~d d (4) t d d 表示在静止参考系S 中对时间求导,此时k j i r r r , ,不变,k j i ′′′r r r , ,变,t d d ~表示在转动参考系S ′ 中对时间求导,此时k j i ′′′r r r , ,不变,k j i r r r , ,变(这个不会用到)。
机械原理科氏力存在的判定科氏力是一种在旋转体系中产生的力。
它是根据机械原理中的科氏定理而得出的。
在本文中,我们将深入探讨机械原理以及科氏力的存在判定。
一、机械原理的概述机械原理是研究力的作用和物体运动的规律的科学理论。
它提供了一种解释物体运动的框架,并通过力的平衡和作用原理进行分析。
机械原理可以帮助我们理解各种物理现象,包括力的产生和作用,运动的轨迹以及各种机械装置的工作原理。
二、科氏力的存在判定科氏力存在的判定是一个重要的问题,在科学界引起了广泛的讨论。
科氏力是旋转体系中的一种惯性力,它的作用是使运动的物体在相对旋转体系中产生向心力。
科氏力的存在对于理解和解释旋转体系中的物体运动非常重要。
科氏力的存在判定可以通过以下几个方面进行评估:1. 旋转体系:我们需要明确讨论的是一个旋转的体系。
这可以是一个旋转的圆盘、车轮或其他旋转物体。
在这个旋转体系中存在着一个固定的坐标系,我们需要在此基础上进行分析。
2. 陀螺仪实验:陀螺仪实验是判断科氏力存在的重要实验之一。
在实验中,通过将陀螺仪置于水平旋转的平台上,我们可以观察到陀螺仪的运动会出现偏转。
这种偏转是由科氏力引起的。
通过这个实验可以验证科氏力的存在。
3. 矢量分析:利用矢量分析的方法,我们可以通过分析速度和加速度的矢量关系来判断科氏力是否存在。
在一个旋转体系中,物体的速度和加速度与非旋转体系中的运动存在一定的关系。
通过对这些矢量关系的分析,我们可以得出科氏力的存在与否。
4. 数学推导:科氏力的存在也可以通过数学推导来证明。
利用旋转坐标系下的运动方程和科氏定理,可以得出科氏力与物体的质量、速度和旋转角度等因素有关的数学表达式。
这个数学推导的过程可以进一步证明科氏力的存在。
三、个人观点和理解对于机械原理和科氏力的存在判定,我持支持的观点。
机械原理是一个重要的学科,它帮助我们理解物体运动的本质和规律。
科氏力作为机械原理的一部分,对于解释旋转体系中的物体运动非常有帮助。
如图,设转动参考系S ′ 相对静止参考系S 绕原点O ′ 以 恒定角速度ωr 转动(O ′ 在S 系是固定点)
,质点P 相对 S 、S ′ 系的位矢分别为r r ′r
r ,,显然下列矢量关系成立: )( )(t r O O t r ′+′=r r
要注意这个关系在S 、S ′ 系看是不一样的:
在S 系看: )()()()()()( )()()(t k t z t j t y t i t x O O k t z j t y i t x ′′+′′+′′+′=++r r r r r r (1) 在S ′ 系看: k t z j t y i t x O O t k t z t j t y t i t x ′′+′′+′′+′=++r r r r r r )()()( )()()()()()( 这是因为在S 系看,k j i r r r , ,是常矢量,而k j i ′′′r r r , ,不是常矢量,以角速度ωr 在转动;反过来在S ′ 系看,k j i r r r , ,不是常矢量,在转动,而k j i ′′′r r r , ,是常矢量。
另外矢量O O ′在S 、S ′ 系看都是常矢量。
如右图,在课堂上我们证明过,一个矢量A r 如果以角速度ωr 转动,
则它对时间的导数是: A t
A r r r ×=ωd d (2)
(即要证明 )(d d //⊥+×=A A t A r r r r ω⊥⊥⊥×=×=A A t A )r r r ωθωˆd d 成立,
对(1从(3)式我们得到一个重要的结论:在静止参考系S 中求转动参考系S ′ 中的某个矢量k A j A i A A z y x ′′+′′+′′=′r r r r 对时间的导数,结果是: A t A t A ′×+′=′r r r r ωd d ~d d (4) t d d 表示在静止参考系S 中对时间求导,此时k j i r r r , ,不变,k j i ′′′r r r , ,变,t d d ~表示在转动参考系S ′ 中对时间求导,此时k j i ′′′r r r , ,不变,k j i r r r , ,变(这个不会用到)。
对(3)式进一步求导,并利用(4)式可得,注意假设了ωr 恒定: )(r a a ′×+′×+′×+′=r r r r r r r r ωωωv v )(2r a a ′××+′×+′=r r r r r r r ωωωv (5)
其中第二项是科里奥利加速度,第三项是牵连加速度。
显然由于这两项的存在,在转动参考系S ′ 中牛II 定律不成立,分别定义科里奥利力和惯性离心力:
)( ,2r m F m F C ′××−=×′=r r r r r r r ωωω离v 则在转动参考系S ′ 中考虑了这两个力之后,牛II 定律成立: a m F F F C ′=++r r r r 离 或 a m r m m a m ′=′××−×′+r r r r r r r )(2ωωωv。