基于COSMOSMotion的3-PRRU并联机器人运动仿真
- 格式:pdf
- 大小:259.40 KB
- 文档页数:5
3-PRR并联机器人机构运动学建模与分析
陈修龙;陈天祥;李跃文;蒙昭如
【期刊名称】《山东科技大学学报(自然科学版)》
【年(卷),期】2018(037)005
【摘要】对3-PRR并联机器人机构的运动学建模和运动特性进行分析研究.建立了机构的位置、速度、加速度运动学正解及反解的数学模型,得出特定轨迹下驱动杆的杆长、速度和加速度的变化曲线,利用ADAMS仿真验证了运动学建模的正确性;分析了机构在不同姿态下的工作空间;推导出机构的雅克比矩阵,据此分析了不同姿态下机构的条件数、最小奇异值、可操作性等特性.
【总页数】9页(P79-87)
【作者】陈修龙;陈天祥;李跃文;蒙昭如
【作者单位】山东科技大学机械电子工程学院,山东青岛266590;山东科技大学机械电子工程学院,山东青岛266590;山东科技大学机械电子工程学院,山东青岛266590;青岛大学数据科学与软件工程学院,山东青岛266071
【正文语种】中文
【相关文献】
1.新型3-PRRS 并联机构的位置正反解分析 [J], 郭宗和;杜晴晴;杨启志
2.新型3-PRRS并联机构动力学分析与控制策略 [J], 李瑞先;杜晴晴
3.平面3-RRR和3-PRR柔性并联机器人弹性动力学分析 [J], 张清华;张宪民
4.3-PPRR并联分拣机器人机构的运动学建模与仿真 [J], 王锦煜;马雪梅;陈安军
5.新型3-PRRS 农业并联机器人运动学及工作空间分析 [J], 杜晴晴;郭宗和;牛桂平
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SolidWorks下cosmosmotion六自由度焊接机器人
三维运动模拟
侯祥明;张立祥
【期刊名称】《煤矿机械》
【年(卷),期】2007(28)9
【摘要】以六自由度机器人三维运动仿真为背景,介绍了利用SolidWorks下cosmosmotion实现机械手运动模拟的有效实体方法,重点分析了六自由度机器人的三维建模和建模后运动轨迹规划的实现。
对于一般的机械运动模拟系统,该实例具有一般普遍性。
【总页数】3页(P95-97)
【关键词】SolidWorks;cosmosmotion;三维运动模拟:轨迹规划
【作者】侯祥明;张立祥
【作者单位】安徽理工大学
【正文语种】中文
【中图分类】TP39
【相关文献】
1.基于ADAMS的六自由度焊接机器人运动学分析及仿真 [J], 余晓流;刘进福;汪丽芳;王伟;王殿君;孙丹
2.MATLAB环境下六自由度焊接机器人运动学逆解及优化 [J], 王战中;杨长建;刘超颖;赵赛;杜启鑫;熊蒙
3.基于虚拟样机的六自由度弧焊接串联机器人的运动仿真 [J], 曲令晋;王兴举;刘伟
4.基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划 [J], 邢红辉;王保升;洪磊;左健民;石朗春
5.基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计 [J], 袁安富;陈成
因版权原因,仅展示原文概要,查看原文内容请购买。
3-RRRT并联机器人的动力学建模与仿真
李海刚;赵新华;徐鹏
【期刊名称】《天津理工大学学报》
【年(卷),期】2009(25)1
【摘要】本文简要介绍了一般并联机器人的特点,分析了3-RRRT并联机器人的构造,运用UG和ADAMS软件,建立了3-RRRT并联机器人的实体模型、运动学与动力学模型.并进行了仿真,最终得到机器人运动中各关节的角速度与力矩值.
【总页数】2页(P20-21)
【作者】李海刚;赵新华;徐鹏
【作者单位】天津理工大学机械工程学院,天津300384;天津理工大学机械工程学院,天津300384;天津理工大学机械工程学院,天津300384
【正文语种】中文
【中图分类】TP24
【相关文献】
1.3-RRRT并联机器人正向动力学仿真 [J], 刘延斌;韩秀英;薛玉君;贾现召
2.3-RRRT并联机器人运动仿真的SimMechanics实现 [J], 汪汇
3.基于牛顿-欧拉递推法的3-RRRT并联机器人动力学建模及仿真 [J], 姜园;赵新华;杨玉维;秦帅华
4.3-RRRT并联机器人动力学建模及其正向求解 [J], 刘延斌;贾现召;赵新华
5.3-RRRT并联机器人传动性能分析及运动仿真 [J], 徐鹏;赵新华;李海刚
因版权原因,仅展示原文概要,查看原文内容请购买。
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://uimg.taocdn.com/3ad4a49648d7c1c709a145a5.webp)
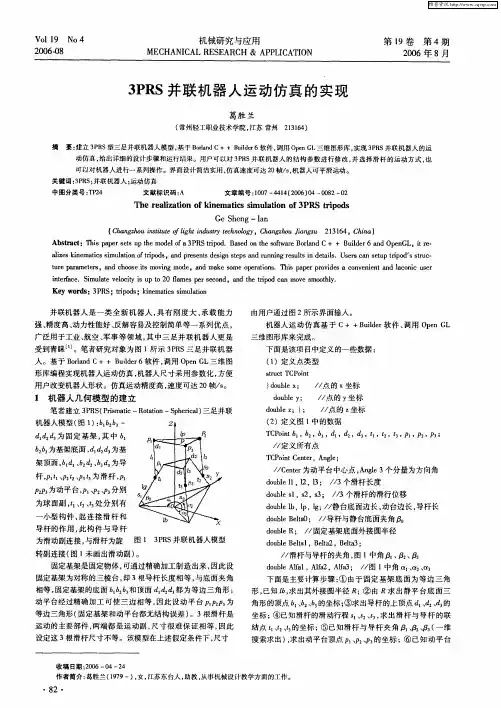
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
基于符号运算的3-PRS并联机器人速度运动学分析康件丽;陈国强;赵俊伟【期刊名称】《机床与液压》【年(卷),期】2014(000)021【摘要】在3-PRS并联机器人设计与控制过程中,求解其输入与末端位姿之间速度及加速度的传递关系是工作重点,但该解析表达式比较复杂。
通过直接采用对时间求导数的方法,得到3-PRS并联机器人速度运动学的解析表达式。
针对推导复杂的问题,利用MATLAB提供的符号推导函数,直接求得输入输出间速度与加速度关系表达式中矩阵的解析表达式;用替换函数将变量替换为具体的数值得到最终的数值解。
给出了具体计算程序,最后用算例验证了该方法的可行性及程序的有效性。
结果表明:采用MATLAB的符号推导功能,可以方便地用解析法及数值法对3-PRS的速度运动学进行研究。
%The transmission relationship of velocities and accelerations between the input parameter and end orientation of manip-ulator is one key task in design and control process of 3-PRS parallel robot,but the analytic expression is rather complex. The velocity kinematics analytic expression of 3-PRS parallel robot was gotten through directly using the method of differentiating with respect to time. Aiming at complexity problem of derivation,the analytic expression of matrixes in the expression of transmission relationship of velocities and accelerations between input and output was gotten directly using the symbolic derivation function provided in MATLAB. The final numerical solution was gotten by replacing all the variables with actual values by using replacingfunction. The detailed calcu-lation program was presented,and the feasibility of the method and the effectiveness of the program were verified through computing ex-amples finally. The result shows that using the symbolic derivation computation functions of MATLAB can facilitate study on velocity ki-nematics of 3-PRS parallel robot using analytic and numerical method.【总页数】5页(P28-32)【作者】康件丽;陈国强;赵俊伟【作者单位】河南理工大学,河南焦作454003;河南理工大学,河南焦作454003;河南理工大学,河南焦作454003【正文语种】中文【中图分类】TP242.2【相关文献】1.基于虚拟样机的倾斜导轨式3-PRS并联机器人的设计与分析 [J], 黄秀琴;潘晨2.基于蒙特卡洛方法的3-PRS并联机器人误差分析 [J], 康件丽;陈国强;赵俊伟3.3-PRS并联机器人惯量耦合特性研究 [J], 王冬;吴军;王立平;刘辛军4.3-PRS并联机构运动学分析 [J], 夏广岚;胡晓平;赵国福;李兵5.3-PRS并联机器人概念设计与运动特性研究 [J], 汤腾飞;张俊因版权原因,仅展示原文概要,查看原文内容请购买。
基于拓扑优化的3-PRPR全柔性并联机构设计及分析董博;王雪【摘要】全柔性并联机构具有分辨率高、运动灵活、动态特性好等优点,但其构型设计往往不能满足微定位和精密加工制造领域的需求.基于并联机构原型,以几何约束为条件,设计出与并联机构原型空间运动特性一致的3-PRPR全柔性并联机构.利用Hyperworks软件行拓扑优化,设计出优化后的3-PRPR全柔性并联机构.分别对这两种3-PRPR全柔性并联机构进行有限元及模态分析,仿真结果表明:在实现相同运动特性的前提下,优化后的3-PRPR全柔性并联机构不仅节省材料,而且在刚度和抗振性方面更优于优化前的机构.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)010【总页数】4页(P170-173)【关键词】全柔性并联机构;拓扑优化;Hyperworks;有限元分析;模态分析【作者】董博;王雪【作者单位】辽宁大学计算中心,辽宁沈阳110036;辽宁大学信息化中心,辽宁沈阳110036【正文语种】中文【中图分类】TH16;TH112基于全柔性并联机构的微操作平台可以实现毫米级甚至微米级的微定位,在生物工程、集成电路制造、光学微处理、航空航天等微领域得到了广泛地应用。
随着微观领域技术的不断拓展,人们进入了“亚微米-纳米”时代,对微操作平台的性能提出了更高的要求,因此设计出一种新型的操作行程大、动态响应速度快和运动精度高的微操作平台具有重要意义[1]。
机构的“型”是微操作平台构型分析与研究的理论基础,也是提高其刚度和定位精度的重要途径[2]。
构型分析的主要目的是机构在某种特定条件下实现运动特性时最合理的应力分布情况,从而设计出精密定位最优的机构构型。
为克服空间全柔性并联机构构型设计的缺陷,将柔性铰链和机构构型集成在一块整体材料上,采用线切割加工方式得到全柔性并联机构支链及其构型,但该方法仍未解决柔性铰链在整体材料上的配置问题[3]。
拓扑优化方法[4]能够在保持机构原有特性的基础上,在一定的约束条件下删除一些不必要的单元,该方法只需规定好原始的设计区域,明确机构的约束位置以及驱动力的加载位置,其会根据受力情况在设计空间内自动寻找出最佳的应力应变分布形式,避免了设计全柔性机构铰链的随机性。
3-PRRU并联机器人运动学设计的开题报告1.研究背景随着制造业的发展和高科技产品的普及,机器人技术的应用越来越广泛,机器人技术作为一种先进的工业自动化技术得到了广泛的关注和研究,机器人已经成为现代制造业中不可或缺的核心技术之一。
机器人的运动学设计是机器人的重要组成部分,对于机器人的性能和精度提高有着重要的影响。
2.研究目的本次研究旨在设计一种PRRU并联机器人的运动学模型,实现机器人的运动规划和运动控制,提高机器人的运动精度和工作效率,提高机器人的应用范围。
3.研究方法本次研究采用了以下方法:(1)PRRU并联机器人结构设计:根据机器人的使用需求和应用场景,设计并实现PRRU并联机器人的结构,包括机器人各个零部件的设计和生产。
(2)运动学建模:对PRRU并联机器人进行运动学建模,建立机器人的运动学方程和控制算法,实现机器人的运动规划和控制。
(3)仿真模拟:采用MATLAB/Simulink等计算机辅助设计软件,对PRRU并联机器人的运动学模型进行仿真模拟,验证机器人的运动规划和控制算法的有效性和可行性。
4.研究内容本次研究的主要内容包括:(1)PRRU并联机器人的结构设计:根据机器人的使用需求和应用场景,设计并实现PRRU并联机器人的结构,包括机器人各个零部件的设计和生产,并完成机器人的组装和调试。
(2)运动学建模:对PRRU并联机器人进行运动学建模,建立机器人的运动学方程和控制算法,实现机器人的运动规划和控制。
(3)仿真模拟:采用MATLAB/Simulink等计算机辅助设计软件,对PRRU并联机器人的运动学模型进行仿真模拟,验证机器人的运动规划和控制算法的有效性和可行性,优化运动控制算法,提高机器人的运动精度和工作效率。
5.研究意义本次研究的主要意义在于:(1)实现PRRU并联机器人的运动规划和控制,提高机器人的运动精度和工作效率,扩大机器人的应用范围和市场需求。
(2)提高我国制造业的发展水平和技术水平,加速机器人产业的发展,推动我国制造业向智能化、高端化的方向发展。
3-PRRU并联机器人的运动学分析的开题报告一、选题背景机器人技术在现代制造业中发挥了重要作用,它不仅提高了生产效率和品质,还减少了劳动力的使用,这对于企业来说是非常有利的。
机器人在制造业中的应用已经相当广泛,特别是在汽车、电子、医疗等行业。
然而,机器人的运动学问题一直是机器人控制的核心问题之一,因此,对机器人的运动学进行深入研究对于机器人技术的发展具有重要意义。
二、选题意义PRRU并联机器人是一种新型的运动机器人,它采用了高刚度和高精度的并联结构,可以在工业生产中完成复杂的运动控制任务,提高了生产线的灵活性和可操作性。
因此,对该类机器人的运动学问题进行深入研究,不仅有助于提高运动控制精度,还可以优化运动路径和提高运动速度,从而满足生产过程中的工业需求。
三、研究内容本文将主要研究PRRU并联机器人的运动学问题,包括机器人工具末端的运动学模型、逆运动学解法、基座标系和工具末端坐标系之间的转换,以及运动学仿真和控制方法等方面。
具体研究内容如下:1. PRRU并联机器人的结构和运动学模型分析;2. 建立PRRU机器人的逆运动学模型,解决机器人复杂控制问题;3. 确定机器人基座标系和工具末端坐标系之间的变换关系;4. 进行PRRU机器人的运动学仿真,并开展控制方法研究;5. 对研究结果进行总结,提出未来的发展方向。
四、研究方法本文主要采用理论分析和仿真方法,通过对机器人结构和运动学模型的分析,建立机器人的逆运动学模型,进而探究机器人的运动规律和控制方法。
仿真是为实验而进行的一种外部方法,利用计算机模拟机器人的运动过程,分析机器人的工作性能和控制策略。
五、预期成果1. 建立起PRRU机器人的逆运动学模型,实现机器人的动态控制;2. 确定机器人基座标系和工具末端坐标系之间的变换关系,实现机器人在不同坐标系中的运动控制;3. 实现机器人的运动规划和路径优化,提高机器人的工作效率和精度;4. 对研究结果进行总结,提出未来的发展方向,促进机器人技术的发展和应用。
一种新型3-PRP并联机器人的运动学分析与仿真于振中;孙强;宁金【期刊名称】《河北工业科技》【年(卷),期】2017(034)003【摘要】针对传统三自由度并联机器人结构分析困难的问题,通过对传统并联机器人结构与性能的分析,提出一种新型3-PRP并联机器人.为有效地降低机器人结构分析的难度,采用直线模组构成2个对称移动副,配合1个转动副,代替传统三自由度并联机器人的3个转动副,并根据该新型机器人的结构特点,建立了运动学模型;应用空间解析几何和向量代数法,推导出机器人的运动学正解与逆解方程;应用MATLAB 仿真软件编程验证运动学正解与逆解的正确性,确立机器人的工作空间.仿真结果表明,该机器人具有工作空间大、运动学模型精度高、制造成本低等特点,具有广泛的工业应用前景.【总页数】6页(P183-188)【作者】于振中;孙强;宁金【作者单位】江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122;江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122;江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122【正文语种】中文【中图分类】TH122【相关文献】1.一种新型3 T1 R并联机器人的拓扑结构设计及运动学分析 [J], 徐乃昊;刘安心;赵明;沈惠平;杨廷力2.一种新型弱耦合三平移并联机器人机构及其运动学分析 [J], 朱伟;戴志明;刘晓飞;沈惠平;朱小蓉;何宝祥3.一种新型欠驱动型并联机器人的运动学分析与仿真 [J], 颜文旭;宁金;孙强;于振中4.一种6自由度冗余驱动并联机器人运动学分析及仿真 [J], 张彦斐;宫金良;李为民;高峰5.一种新型3T1R并联机器人机构运动学分析与参数优化 [J], 徐化娟;李宏伟;张春燕因版权原因,仅展示原文概要,查看原文内容请购买。