以重力势能驱动的具有方向控制功能的自行小车
- 格式:doc
- 大小:434.00 KB
- 文档页数:12

以重力势能驱动的具有方向控制功能小车的设计摘要:本文根据竞赛命题“无碳小车”,即给定一重力势能,根据能量转换原理,设计一种可将该重力势能转换为动能来驱动小车行走的装置。
该小车要求采用三轮结构(1个转向轮,2个驱动轮),并且小车在前行时能够自动避开赛道上设置的障碍物(每间隔1米,放置一个直径20mm、高200mm的弹性障碍圆棒)。
本小车最大的亮点是采用两边对称的永久磁铁固定车的车把,周期性使车把左右固定,使小车一直走的路线是相切的圆弧,从而实现绕过障碍物。
本文将对小车的设计过程和亮点进行阐述。
关键词:无碳小车自动转弯圆弧路线重力1引言随着资源越来越少,而需求量越来越大的发展趋势,研究无碳能源越来越受到关注,本文设计的无碳小车就是一次小的创新。
本研究就是来自第二届全国大学生工程训练综合能力竞赛赛题,通过设计研究,即围绕命题“无碳小车”,不利用有碳能源,即根据能量转换原理,将重力势能转换为小车的动能,并能实现自动转弯绕障碍的功能。
2小车的相关参数选择和分析图1:小车示意图图2为小车的三维图1)上图为小车的主要结构图A 转向把B 永久磁铁C 打片(对称的两个)D 驱动转向把的装置E 重物F 前后皮带轮G 转向轮H 驱动轮 I支架 J直铁丝2)工作原理:利用重物的重力势能转化为小车前行的动能,同时带动皮带轮实现前轮转向 以下是工作示意图3)理论计算小车参数:重物1Kg小车总重: m=2.5kg(带重物与载荷)小车后轮直径Ø=110 绳索缠绕的直径为Ø=7启动前直径大于10,这样便于小车启动。
受力如图所示列平衡方程ΣFx=0 Pcos α-Fs=0Σfy=0 Fn + Psin α- mg=0ΣM(F)=0 Mf – Pcos α·h -Psin α·d =0DB F 1CEF 2AHGIJ有上方程解得Fs=Pcosα,Fn =mg- Psinα,Mf = Pcosα·h + Psinα·d小车不滑动即Fs<Fmax,即小车不滑动的条件是Pcosα<fsFn=fs(mg-Psinα)代入数据重物P=10N, α取85°,fs取0.1,(其中α为绳索和水平线的夹角,fs为地板摩擦系数)。
题目三:设计“无碳小车”
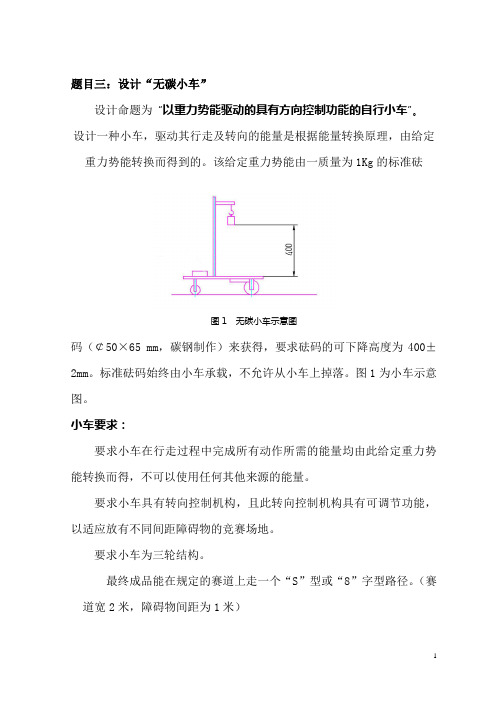
设计命题为“以重力势能驱动的具有方向控制功能的自行小车”。
设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换而得到的。
该给定重力势能由一质量为1Kg的标准砝
图1 无碳小车示意图
码(¢50×65 mm,碳钢制作)来获得,要求砝码的可下降高度为400±2mm。
标准砝码始终由小车承载,不允许从小车上掉落。
图1为小车示意图。
小车要求:
要求小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,不可以使用任何其他来源的能量。
要求小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地。
要求小车为三轮结构。
最终成品能在规定的赛道上走一个“S”型或“8”字型路径。
(赛道宽2米,障碍物间距为1米)
图2 无碳小车在重力势能作用下自动行走示意图
图3 “8”字型赛道竞赛所用乒乓球台及障碍设置图
具体要求:
1.确定机构运动方案-每组提出三个方案,并画在说明书中。
2.针对最优方案,绘制机构运动简图(A3图纸上)。
3.绘制机构运动循环图(A3图纸上)。
4.图解法(连杆机构)或解析法(凸轮机构)设计所选方案中其中一个机构,要求具体的结构尺寸,对方案中其它机构只需要能求出传动比及总体安装尺寸即可。
5.就上述机构用解析法进行运动分析(要求上机调试,对结果进行分析,并打印出程序及结果)。
6.编写设计计算说明书。

小车功能设计要求无碳小车走“8”字形越障的设计1.1设计布置方案无碳小车示意图1.2功能设计要求以重力势能驱动的具有方向控制功能的自行小车。
给定一重力势能,根据能量转换原理,设计一种可将该重力势能转换为机械能并可用来驱动小车行走的装置。
小车在半张标准乒乓球台(长1525mm、宽1370mm)上,绕相距400mm距离的两个障碍沿8字形轨迹绕行,绕行时不可以撞倒障碍物,不可以掉下球台。
障碍物为直径20mm、长200mm的2个圆棒,以小车完成8字绕行圈数的多少来综合评定成绩。
见下图二:图二小车绕行所用乒乓球台及障碍设置图给定重力势能为4焦耳(取g=10m/s2),用质量为1Kg的重块( 50×65 mm,普通碳钢)铅垂下降来获得,落差400±2mm,重块落下后,重物须被小车承载,并同小车一起运动,不允许掉落。
要求小车在前行过程中完成的一切动作所需的能量均由重力势能转换获得,不可用任何其他的能量形式。
小车要求采用三轮结构,具体结构以及材料选用均由学生自主设计完成。
二方案设计通过对小车的功能分析小车需要完成重力势能的转换、驱动自身行走、自动避开障碍物。
为了方便设计这里根据小车所要完成的功能将小车划分为五个部分进行模块化设计(五部分分别为:车架、原动机构、传动机构、转向机构、行走机构)。
2.1车架车架由于不需要承受太大的重力势能,所以其对强度要求不高。
在考虑到整理成本和加工的难易程度后,由于铝板密度小,强度对于整理小车也足够,同时易于加工,所以车架采用铝条焊接铝板加工整理成底板,即方便也经济。
2.2原动机构原动机构的作用是将重块的重力势能转化为小车的驱动力。
我们设想使用飞轮作为储能机构,小车对原动机构应有这些要求。
1.驱动力适中,不会使小车拐弯时因速度过大而是离心力增大导致小车倾翻,或重块晃动厉害影响行走。
2.小车在到达终点前重物竖直方向上的速度要尽可能小,避免对小车过大的冲量。
同时使重物的动能尽可能的转化为驱动小车前进的驱动力,假如重块竖直方向的速度较大,重物本身还有较多动能未释放出来,能量利用率不高,将减小小车的行程。

关于参与第五届全国大学生工程训练综合能力竞赛的通知各学院:由全国大学生工程训练综合能力竞赛两委会(组委会、专家委员会)负责并报请教育部批准,第五届全国大学生工程训练综合能力竞赛国赛段将在沈阳航空航天大学和合肥工业大学两所高校各举办一场。
在沈阳航空航天大学举办的是“无碳小车越障竞赛”,命题及竞赛内容与第四届全国大学生工程训练综合能力竞赛国赛段相同。
在合肥工业大学举办的是“重力势能驱动的自控行走小车越障竞赛”。
学校决定在全校范围内选拔参赛队员,欢迎同学们积极参与。
本次参赛选手初选、复选及参赛指导等工作由工程训练中心负责组织实施。
现将有关事项通知如下:一、沈阳赛区的比赛命题与竞赛内容1.竞赛主题竞赛主题为“无碳小车越障竞赛”。
要求经过一定的前期准备后,在比赛现场完成一台符合本命题要求的可运行的机械装置,并进行现场竞争性运行考核。
每个参赛作品需要提交相关的设计、工艺、成本分析和工程管理4个文件及长度为3分钟的关于参赛作品设计及制作过程的汇报视频。
2.竞赛命题本届竞赛命题为“以重力势能驱动的具有方向控制功能的自行小车”。
设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换而得到的。
该给定重力势能由竞赛时统一使用质量为1Kg的标准砝码(¢50×65 mm,碳钢制作)来获得,要求砝码的可下降高度为400±2mm。
标准砝码始终由小车承载,不允许从小车上掉落。
图1为小车示意图。
图1 无碳小车示意图要求小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,不可以使用任何其他来源的能量。
要求小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地。
要求小车为三轮结构。
具体设计、材料选用及加工制作均由参赛学生自主完成。
3.竞赛安排每个参赛队由3名在校本科大学生和1名指导教师及1名领队组成,参加校、省及全国竞赛。
3.1 本校制作参赛队按本竞赛命题的要求,在各自所在的学校内,自主设计,独立制作出一台参赛小车。
8字形轨迹无碳小车的创新性设计摘要:针对第三届全国大学生工程训练综合竞赛“无碳小车”主题,设计一种以重力势能驱动具有方向控制功能8字形轨迹自行小车,提出了一种创新设计,设计出一种结构简单,制作容易的无碳小车,该小车特点是:小车为边三轮结构,采用共轭凸轮滚子直动推杆转向机构,采用了动滑轮组、锥形滚筒及约束导轨,提高了能量利用率及行驶稳定性,使得行驶轨迹更精确,行驶路程更远。
本设计为日常生活、工业生产、儿童玩具车中需要“8”字形轨迹控制的小车机构设计提供了借鉴,有较好应用价值。
关键词:无碳小车、8字形轨迹、方向控制、共轭凸轮、机构设计1 引言当今世界,科学技术飞速发展,人们生活水平不断提高,然而环境污染也日益严重,可持续发展已成时代潮流,“低碳生活”观念已成共识。
坚持科学发展观,走可持续发展道路是社会发展必然趋势,现在许多发达国家都把无碳技术运用到工农业及日常生活各领域,我国也在加大无碳生产技术的研究。
鉴于此,设计无碳小车模型具有重要意义。
小车设计要求:全部能量由重力势能提供,能绕一定间距两障碍物走8字形轨迹,能自动转向。
2 运动轨迹分析及设计小车在行驶时能绕一定间距两障碍物沿8字形循环绕行,要求转向机构能周期转向,在速度一定下,必须保证小车运动轨迹曲率是连续的,否则曲率突然改变,小车容易晃动甚至倾覆。
因此,可将小车轨迹设计成由两个相切的圆组成的8字形,使小车在每走完半个8字时转向机构换向一次,即实现8字绕行。
3 驱动及转向原理重物下降过程中,重力势能通过绳轮式原动机构传递给后轮轴,轴带动后轮转动,带轮传动机构将能量传递给共轭凸轮滚子直动推杆转向机构,控制小车前轮自动转向,在行走机构驱动下使小车前行,根据小车行驶8字形轨迹大小来设计带轮传动机构传动比及转向机构凸轮形状,同时在微调机构调节下对前轮摆角进行微调,使前轮在每走完半个8字时转向一次,即实现小车走8字形轨迹。
图4:驱动转向原理图(2. 驱动轴4.滚筒 6.带轮8.定滑轮12.凸轮18.前轮20.边轮23.后轮24.小带轮)4 机构设计根据功能要求把小车分为原动机构、传动机构、转向机构、行走机构四个模块,进行模块化设计。
无碳小车设计说明书班级:过控09-2班姓名:候朋远团队成员:候朋远曾金石2012.10目录一竞赛命题及参赛项目 (3)二设计思想 (4)三传动机构方案拟定 (5)四工作过程 (11)2一竞赛命题及参赛项目竞赛命题I:以重力势能驱动的具有方向控制功能的自行小车。
设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。
给定重力势能为4焦耳(取g=10m/s2),竞赛时统一用质量为1Kg的重块(¢50×65 mm,普通碳钢)铅垂下降来获得,落差400±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。
图1为小车示意图。
具体要求:(1)小车前行过程中完成的所有动作所需的能量均由此能量转换获得,不可使用任何其他的能量形式;(2)小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地;(3)小车为三轮结构,具体设计、材料选用及加工制作均由参赛学生自主完成。
小车示意图无碳小车在重力势能作用下自动行走示意图参赛项目:竞赛命题II:第一阶段:小车在半张标准乒乓球台(长1525mm、宽1370mm)上,绕放置在中线上相距不小于300mm距离(具体距离自定)的2个障碍物沿8字形轨迹绕行,出发点自定,绕行时不可以撞倒障碍物,不可以掉下球台。
障碍物为直径20mm、长200mm的2个圆棒,以小车完成8字绕行圈数的多共12 页少来综合评定成绩。
第二阶段:经比赛现场公开抽签,在300-500mm范围内产生一个新的障碍物间距。
本组各队根据调整后的障碍间距,对自己的小车进行调整装配或修配。
组委会在现场提供普通车床、钳工台及调试场地。
在规定的时间内,各队应完成调整修配内容。
本组各队携带调整修配后小车,在调整障碍间距后的竞赛场地上,进行比赛。
二设计思想1、传递主动力的机构越多,传递效率越低;2、单周期路径越短,能量损失越少;3、物块下落的最终速度越慢,小车获得的能量越多;4、车身越轻,阻力越小,有效功越多;5、整车重心越低,车子越稳定;4三传动机构方案的拟定原理分析:三轮车绕杆和实际车体转向过程原理相同,车体转向时方向控制轮(此处为前轮)与车体轴线产生夹角a,此时后轮轴线与前轮轴线相交于远处一点,当夹角a不变时,实际汽车后轮为差动连接,所以车体绕该点做转动。
0引言无碳小车是一种通过滑轮机构将重物下落的重力势能转化为小车前进的动能以实现小车行走,并采用合理的机构,来实现行走过程中正确转向并绕过障碍的装置。
小车设计注重能量利用的有效性,车体结构的合理性,行走的稳定性、匀速性,调试的可靠性等。
应用了诸多数学理论进行验证,最终采用了万向节连杆机构作为转向机构,使小车控制转弯更省力、对小车躲避障碍物的周期控制更容易实现,亦降低了整车重量。
再者小车整体构造简洁,组合零件不多,摩擦损耗小,效率高,较容易安装制造。
另外,通过对小车的设计、制作和调试,提高了提出问题、分析问题、解决问题的能力,并总结了从中获得的经验和教训。
1无碳小车的制作原理1.1命题简介该竞赛其中的一个命题为,要求设计一种以重力势能驱动的具有方向控制功能的自行小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。
给定重力势能为4焦耳(取g=10m/s2),竞赛时统一用质量为1kg的重块(50×65mm,普通碳钢)铅垂下降来获得,落差400±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。
在比赛中,小车出发后,小车从赛道一侧越过一个障碍后,整体穿过赛道中线且障碍物不被撞倒(擦碰障碍,但没碰倒者,视为通过);重复上述动作,直至小车停止(障碍物初始间距为1m,后期在1m±100mm范围内产生一个新的障碍物间距,需调整小车以适应新距离),最终绕过障碍物多者获胜。
1.2无碳小车设计原理由命题得知,关键在于利用重力势能获得相当长距离的具有稳定正弦特征的轨迹。
由此,来设计小车以使其满足要求。
重力势能大多通过挂在绳子上的重物拖动小车的轴进而驱使小车前进,这便对绳子提出较高的要求,一般选取弹性较小,耐磨的绳子为佳。
在传动方面,根据往届赛事经验,有齿轮传动,皮带传动等。
由于小车在前行较长距离(一般为20m以上),同时需要保证精确的行走轨迹,因此,皮带由于打滑等原因不如齿轮传动。
附件1命题1:以重力势能驱动的具有方向控制功能的自行小车1.功能设计要求给定一重力势能,根据能量转换原理,设计一种可将该重力势能转换为机械能并可用来驱动小车行走的装置。
该自行小车在前行时能够自动避开赛道上设置的障碍物(每间隔1米,放置一个直径20mm、高200mm的弹性障碍圆棒)。
以小车前行距离的远近、以及避开障碍的多少来综合评定成绩。
给定重力势能为5焦耳(取g=10m/s2),竞赛时统一用质量为1Kg的重块(¢50×65 mm,普通碳钢)铅垂下降来获得,落差500±2mm,重块落下后,须被小车承载并同小车一起运动,不允许掉落(见图1和图2)。
要求小车前行过程中完成的所有动作所需的能量均由此能量转换获得,不可使用任何其他的能量形式。
小车要求采用三轮结构(1个转向轮,2个驱动轮),具体结构造型以及材料选用均由参赛者自主设计完成。
要求满足:①小车上面要装载一件外形尺寸为¢60×20 mm的实心圆柱型钢制质量块作为载荷,其质量应不小于750克;在小车行走过程中,载荷不允许掉落。
②转向轮最大外径应不小于¢30mm。
参赛者需要提交关于作品的设计说明书和工程管理方案、加工工艺方案及成本分析方案报告。
要求参赛者在自制的载荷质量块上自主设计并加工出反映本届竞赛主题的徽标。
参赛队参赛时同时提交徽标设计说明(篇幅限制为A4纸一张,文字部分的字数不超过300字,内容包括创意、材料、制作说明),作为评分点之一。
2.本校制作:以参赛小组为单位,每组不多于3人。
按照预赛阶段的要求,在各自所在的学校内,自主设计相关结构,图片和动画。
通过学校选拔比赛,决定1-2项参加省级分区赛的项目,并制作出全部零件。
3.省分区赛内容:加载符合本命题规定的比赛载荷质量块,在硬质水平地面(例如光滑的水泥地面、水磨石地面或室内标准球赛地板等)的指定赛道上进行比赛,小车需按规定绕过各个障碍。
行走绕过的障碍越多,得分越高。
无碳小车设计说明书
班级:过控09-2班
姓名:候朋远
团队成员:候朋远曾金石
2012.10
目录
一竞赛命题及参赛项目 (3)
二设计思想 (4)
三传动机构方案拟定 (5)
四工作过程 (11)
一竞赛命题及参赛项目
竞赛命题I:以重力势能驱动的具有方向控制功能的自行小车。
设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。
给定重力势能为4焦耳(取g=10m/s2),竞赛时统一用质量为1Kg的重块(¢50×65 mm,普通碳钢)铅垂下降来获得,落差400±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。
图1为小车示意图。
具体要求:(1)小车前行过程中完成的所有动作所需的能量均由此能量转换获得,不可使用任何其他的能量形式;(2)小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地;(3)小车为三轮结构,具体设计、材料选用及加工制作均由参赛学生自主完成。
小车示意图无碳小车在重力势能作用下自动行走示意图
参赛项目:
竞赛命题II:
第一阶段:小车在半张标准乒乓球台(长1525mm、宽1370mm)上,绕放置在中线上相距不小于300mm距离(具体距离自定)的2个障碍物沿8字形轨迹绕行,出发点自定,绕行时不可以撞倒障碍物,不可以掉下球台。
障碍物为直径20mm、长200mm的2个圆棒,以小车完成8字绕行圈数的多
少来综合评定成绩。
第二阶段:经比赛现场公开抽签,在300-500mm范围内产生一个新的障碍物间距。
本组各队根据调整后的障碍间距,对自己的小车进行调整装配或修配。
组委会在现场提供普通车床、钳工台及调试场地。
在规定的时间内,各队应完成调整修配内容。
本组各队携带调整修配后小车,在调整障碍间距后的竞赛场地上,进行比赛。
二设计思想
1、传递主动力的机构越多,传递效率越低;
2、单周期路径越短,能量损失越少;
3、物块下落的最终速度越慢,小车获得的能量越多;
4、车身越轻,阻力越小,有效功越多;
5、整车重心越低,车子越稳定;
三传动机构方案的拟定
原理分析:三轮车绕杆和实际车体转向过程原理相同,车体转向时方向控制轮(此处为前轮)与车体轴线产生夹角a,此时后轮轴线与前轮轴线相交于远处一点,当夹角a不变时,实际汽车后轮为差动连接,所以车体绕该点做转动。
转向过程中夹角a逐渐增大,达到一定程度时开始逐渐减小,直至与前轮轴线与车体轴线重合,车子完成转向过程做直线运动。
主动力传动过程中只通过一个定滑轮,让传动效率最大化;
根据能量守恒,最初的总能量为物块的重力势能,随着物块下落,通过细绳拉动车子前进,物块部分能量转换为车子的动能及车体摩擦损失,其余部分使物块获得前进和下落的速度。
车E =车E +2x MV 21+2y MV 2
1
确定较大传动比,使小车初始运动时的动力略大于其静摩擦阻力,这样使小车获得最小初速度和较小的加速度,重物落下时速度较慢,转化为车子前进的有用功越多。
实际汽车转向的实现,由于两轮速度相同直径相同但路程不同,要依赖于后轮之间的差动连接,本设计中的小车后轮没有差动连接,存在一个轮滚动和滑动同时出现的情况,考虑到物块开始运动时重心较高,小车转向过程中需要较大的力矩平衡物块受到的向心力,此时处在行进曲线外侧
的轮支撑力F
1远大于内侧轮支撑力F
2
,则内侧轮滚动和滑动同时存在,外
轮做纯滚动,所以以外轮路径为计算基准。
(上图)
图中凸轮顶杆通过车身两处支撑使其保持水平且不能产生水平方向的摆动,用弹簧拉紧使其一段时刻与凸轮轮廓曲线接触,另一端设置一拐头,放置在前轮轴伸出部分的槽内,前轮与车身轴线夹角的正切值与凸轮轮廓到凸轮转动中心的距离成正比,这样就可以通过改变凸轮轮廓曲线实现对车前轮与车身轴线夹角的控制。
机构简图
依照三轮车的转向原理:设定小车后轮中心点的行进路线(如下图)在两杆之间的较长的距离内车子路径为直线,绕杆可设置为曲线,这样直线与曲线段相切,转向过程过渡平稳。
根据上述转向原理,小车实际的尺寸以及设定的后轮曲线,可以求出前轮的运行曲线,之后求出后轮中心处切线斜率与前轮曲线切线斜率之差,即可得到前轮与车身轴线的夹角的变化规律,确定凸轮轮廓曲线,由于小车进入曲线和走出曲线时φ角是突变量,为了到过渡的平稳性,在轮廓曲线加工时适当的将开槽提前,并进行过渡处理,使得转向更平稳,后轮中心轨迹更精确。
为简便轮廓曲线的加工,将后轮中心轨迹曲线设定为圆弧,这样凸轮轮廓对应段距离旋转中心距离不变,则曲线段也为圆弧。
结构实现:计算设定路线的总路程和后轮周长,它们的比值即为后轮与凸轮的带传动传动比,这样车子行进一个周期(完整8字形)时凸轮刚好转过一圈,计算绕杆曲线段在一个周期路段中所占的比例,即可确定圆盘凸出和下凹的部分对应的圆周角,设定的圆弧段的半径可以确定凸轮凸出和下凹部分的深度,图中虚线部分为车子直行时凸轮对应位置,车子从“8”字形两圆弧相交点O释放(对应位置为虚线与凸轮轮廓左侧相交位置),通过过渡段OC(对应位置为凸轮凸出和下凹连接段)之后,车子开始绕A 杆运动,轨迹为圆弧CD(对应位置为凸轮下凹部分),绕行至过渡段DO(下凹部分结束),小车前轮开始向另一侧偏转,小车经过过渡段OE进入另一侧圆弧EF(凸轮对应位置为凸出部分),完成绕杆(凸出段结束)经过过渡段FO回到起点,一次绕行结束,之后重复上述动作。
四工作过程
由于小车计算路径以后轮为基准,因此开始运动的位置要与凸轮的相应位置对应,对应之后将物块提升至要求高度,将细线通过车架顶部的滑轮然后逆时针缠绕在固定于后轮轴的绕线轴上,释放物块,物块由于重力作用通过细线拉动后轮使其转动,从而带动车体前进,通过带轮传动将运动传递到凸轮,带动凸轮转动,通过凸轮顶杆实现对前轮与车身轴线夹角的控制,即实现绕杆过程。
当两杆之间的距离变动时,设定好车子行进轨迹,改变带传动传动比,使小车行进一个周期时圆盘同样刚好转动一周,换一块满足新轨迹要求的凸轮即可。
效果图:
主要传动机构
整体视图。