39-SIMULINK在水轮机调节系统仿真中的应用
- 格式:pdf
- 大小:140.53 KB
- 文档页数:3
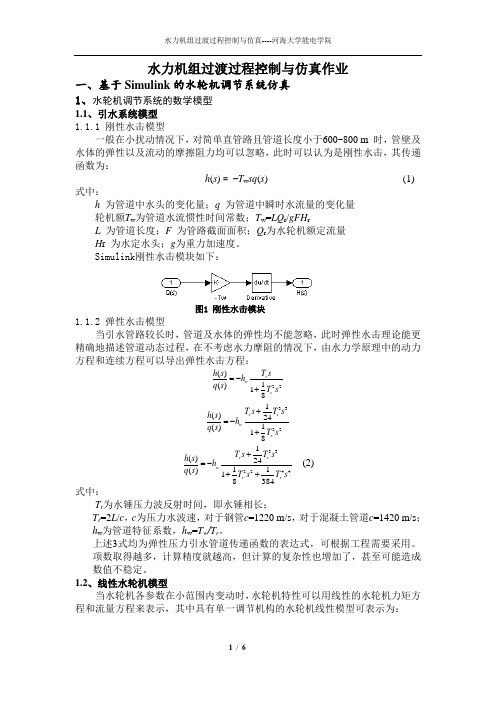
水力机组过渡过程控制与仿真作业一、基于Simulink的水轮机调节系统仿真1、水轮机调节系统的数学模型1.1、引水系统模型1.1.1 刚性水击模型一般在小扰动情况下,对简单直管路且管道长度小于600~800 m 时,管壁及水体的弹性以及流动的摩擦阻力均可以忽略,此时可以认为是刚性水击,其传递函数为:h(s) = −T w sq(s) (1)式中:h 为管道中水头的变化量;q 为管道中瞬时水流量的变化量轮机额T w为管道水流惯性时间常数;T w=LQ r/gFH rL 为管道长度;F 为管路截面面积;Q r为水轮机额定流量H r 为水定水头;g为重力加速度。
Simulink刚性水击模块如下:图1 刚性水击模块1.1.2 弹性水击模型当引水管路较长时,管道及水体的弹性均不能忽略,此时弹性水击理论能更精确地描述管道动态过程,在不考虑水力摩阻的情况下,由水力学原理中的动力方程和连续方程可以导出弹性水击方程:22()1()18rwrT sh shq s T s=-+33221()241()18r rwrT s T sh shq s T s+=-+3322441()2411()18384r rwr rT s T sh shq s T s T s+=-++(2)式中:T r为水锤压力波反射时间,即水锤相长;T r=2L/c,c为压力水波速,对于钢管c=1220 m/s,对于混凝土管道c=1420 m/s;h w为管道特征系数,h w=T w/T r。
上述3式均为弹性压力引水管道传递函数的表达式,可根据工程需要采用。
项数取得越多,计算精度就越高,但计算的复杂性也增加了,甚至可能造成数值不稳定。
1.2、线性水轮机模型当水轮机各参数在小范围内变动时,水轮机特性可以用线性的水轮机力矩方程和流量方程来表示,其中具有单一调节机构的水轮机线性模型可表示为:t y x hqy qx qhm e y e x e hq e y e x e h=++=++(3)式中:1, 1.5, 1.0,0.5,0y h qy qh qxe e e e e=====为水轮机力矩对导叶开度传递系数xe水轮机力矩对转速传递系数;he水轮机力矩对水头传递系数;qye水轮机流量对导叶开度传递系数;qxe水轮机流量对转速传递系数;qhe水轮机流量对水头传递系数。
![水资源供需过程平衡应用Simulink建模仿真的研究[教材]](https://img.taocdn.com/s1/m/b44c160bc381e53a580216fc700abb68a982ad65.png)
水资源供需过程平衡应用 Matlab/Simulink建模仿真的研究朱光华(福建省水利水电勘测设计研究院,福建福州 350001)摘要:目前国内外对水资源供需过程平衡通常是建立基于数据库系统的仿真模型,本文另辟蹊径,提出利用Matlab /Simulink仿真软件建模,可提高建模的速度和降低费用,文中阐述了基于Matlab /Simulink建立水资源供需仿真模型的关键技术问题。
关键词:Matlab /Simulink;水资源供需平衡;建模仿真1 引言水资源供需平衡分析计算是做好水资源规划、开发利用和管理的重要基础工作,以往经常采取供需总量平衡的方法,由于精度较粗,已越来越不适应今后工作的要求,今后水资源供需平衡不仅要分析计算总量平衡情况,更要分析计算长系列逐月(或旬)的供需平衡过程情况。
针对水资源供需过程平衡,目前国内外通常的做法是针对具体流域或区域,建立基于数据库系统的水资源仿真模型,再进行水资源供需过程平衡分析计算,这是一种有效的办法,但建立模型的过程费时费力,费用也不菲,移植性和扩充性较不便,另外虽说是仿真模型,但用户看不见模型内部的结构、逻辑关系等,只能看到输出的结果,这也不能不算是一个缺憾。
如能在水资源供需平衡中引入成熟仿真软件平台,则可大大提高建模的速度,降低建模的费用。
经过笔者初探,利用Matlab /Simulink软件可以实现这一设想。
Matlab /Simulink软件是目前国内外功能最强大的仿真软件之一,由Mathworks公司出品。
Matlab是一种科学计算软件,它将高性能的数值计算和可视化集成在一起,并提供了大量的内置函数,具有开放式结构,很容易进行功能扩充; Simulink 是基于 Matlab 的框图设计环境,可以用来对各种动态系统进行建模、分析和仿真。
Matlab /Simulink广泛应用于科学计算、控制系统、信息处理等领域的分析、仿真和设计工作,在航空航天动力学系统、制导系统、通讯系统、电力系统、建筑业等领域均有大量应用,但目前为止,笔者还没发现国内外有应用于水资源仿真的先例。
基于PSD-BPA和Simulink的水轮机调节系统建模与仿真校核摘要:水轮机调节系统模型是电力系统稳定分析的基础数据,以某水电厂2号机组为研究对象,对其调速器系统模型参数进行辨识。
本文采用基于PSD-BPA的模型参数辨识方法,并利用Matlab及其Simulink工具箱予以实现。
结果表明,该方法较为适用于水轮机调速系统模型参数的辨识,辨识所得到的模型也达到了较高的仿真精度。
关键词:调速系统;参数辨识;Simulink 工具箱;PSD-BPA引言近年来,我国电网发展迅速,电网的装机容量与规模越来越大,而随着全球能源互联网的提出,全球电网互联成为了可能。
电网的大规模互联既可以优化全国的资源能源互联,但同时又给电网的坚强性带来了更大的挑战。
因此,保证电网的稳定性是近年来重点关注的课题[1-2]。
水轮机调速系统在水轮机实际运行控制中起着非常重要的作用,其特性直接影响机组的稳定性。
对水轮机组的调速系统进行试验及辨识研究是十分必要的。
传统方法在对水轮机调速系统进行试验时往往不能提供全部有效的参数,在进行参数辨识时对其中的非线性问题也很难做出有效的处理。
针对此种情况,本文利用Matlab/simulink工具箱及电力系统潮流及暂态稳定程序PSD-BPA的联合仿真建模方法,实现了对具有复杂协调控制系统的水轮机调节系统的建模和仿真校核[3-4]。
1 模型确定某水电站3×30MW机组2号机采用了北京中水科水电科技开发有限公司生产的CV-80-6.3型并联PID微机调速器。
厂家提供的CV-80-6.3型水轮机调节系统传递函数框图如图1所示。
该模型中有自动方式和手动方式两种控制方式。
调速器正常运行在自动方式下。
图2 调节系统模型框图2 稳定计算用模型参数及仿真校核2.1 现场试验肯斯瓦特水利枢纽工程电站3×30MW机组2号水轮机额定容量30MW。
水轮发电机为哈尔滨电机厂有限责任公司制造,水轮机型号为HLJF-LJ-252,发电机型号为SF30-22/5000。


水轮机调节系统的仿真与优化设计者:闫艳伟、夏春杰、刘博文、房全国、郭朋飞指导老师:周俊杰(郑州大学化工与能源学院,郑州,450001)摘要水能一种可再生能源,是清洁能源,是绿色能源。
我国水资源的蕴藏总量是比较丰富的,占世界第五位,随着科技的进步我国的水利工程也得到迅速发展。
而水轮机在水利工程中起着至关重要的作用。
随着科学技术的发展和新学科边缘学科交叉学科的诞生,计算机的应用、水轮机技术得到了进一步的完善发展,并取得了卓著绩效。
改善水力性能提高效率,特别在近年来,水轮机制造业都在不断提高水轮机效率上下功夫,无论是其最高效率和平均效率都有了新的突破。
利用matlab simulink对水轮机进行系统仿真主要内容有:(1)水轮机装置系统的数学模型的建立,包括:引水系统、液压随动系统、发电机系统、水轮机线性和非线性系统。
(2)在simulink下建立水轮机的线性和非线性发电系统的仿真模型。
(3)对甩15%载荷和甩60%载荷进行了仿真分析,并得出水轮机线性化模型优于非线性化模型稳定性。
【关键字】:水轮机;数值模拟;水轮机仿真模拟;线性化;非线性化目录1.前言 (3)1.1水轮机的发展历史 (3)1.2水轮机国内外研究现状 (3)1.3本文的主要工作 (4)2 水轮机发电系统仿真 (4)2.1 水轮机发电原理 (4)2.2 水轮机装置的数学模型 (5)2.2.1引水系统数学模型 (5)2.2.2液压随动系统模型 (5)2.2.3发电机系统数学模型 (5)2.3 水轮机系统仿真建模 (5)2.3.1线性化水轮机的数学模型 (5)2.3.2线性化水轮机的仿真建模 (6)2.3.3非线性水轮机的数学模型 (6)2.3.4非线性水轮机的仿真建模 (8)2.4水轮机调节系统的仿真建模 (9)2.5结果分析 (10)2.6 本章小节 (11)1前言1.1水轮机的发展历史水轮机是把水流的能量转换为旋转机械能的动力机械,它属于流体机械中的透平机械。

54 1基于Simulink的水轮发电机组动态过程仿真研究摘要:本文实现了基于MATLAB/Simulink的水轮机组动态过程的仿真,建立了包括水轮机,计及阻尼绕组水轮发电机,调速器,励磁系统和输电线路的全系统的数学模型,用隐式梯形法将描述全系统动态特性的微分方程转化成差分方程,采用牛拉法对相应的差分方程和网络代数方程进行联立求解,采用适合于数值计算且易与仿真平台接口的高级语言Matlab进行编程计算,并在Simulink平台上建立了相关模型,实现了同步发电机突然短路暂态过程的仿真,并在单机无穷大系统上实现了功率调节和励磁调节的动态过程的仿真。
关键词:隐式梯形法;牛拉法;单机无穷大系统;功率调节;励磁调节。
Dynamic Process Simulation of Hydro-generatorsBased on SimulinkAbstract:Dynamic process simulation of generators is carried out in this paper, based on Matlab/Simulink. Accurate mathematical models of hydro generation system, which includes the water turbine, hydro-generator model with damp winding model, speed governor, exciter and power transmission line, are built. The ordinary differential equations describing the dynamic characteristics of the hydro-generators are transformed into difference equations by use of the implicit trapezoidal rule. The Newton method is applied to find the solution of corresponding simultaneous difference equations and algebraic network equations. Digital simulative software was mainly programmed with Matlab for its fitness to numerical calculation and easiness to interface with simulation platform. It is also built in Simulink. The simulation of three-phase sudden short-circuit is made. The main dynamic process simulations for single-machine-infinite system are done, which include active power adjustment and excitation regulating for the control of the terminal voltage of generator.Keywords:implicit trapezoidal rule;Newton method;Single-machine-infinite System;Power Aadjustment ;Eexcitation Rregulating54 2前言随着电力工业的日益发展,现代电力系统向着大容量机组,超高压线路和大范围远距离网络互联的方向发展,这种大规模联合电力系统无论是在电网运行优化、电气操作还是事故处理方面,都对运行人员的技术水平、管理能力提出了越来越高的要求。
同步电机这个演示说明了同步电机与水轮机和调速器(HTG)和励磁系统模块使用,和使用潮流分析模块来初始化发电机电流相关。
电路介绍:三相发电机额定200MV A,13.8kV,112.5RPM是通过一个△-Y210MV A变压器连接至230千伏容量为10000 MV A的电网。
在t=0.1秒,三相接地故障发生在230 kV母线上。
经过6周期(t=0.2秒)后,故障被清除。
在本演示中,您将初始化系统,为了使电路启动在发电机提供150MW的有功功率的稳态,并观察其电压和速度调节器的发电机和动态响应。
示范:1、开始仿真并在示波器上观察ABC三相电流。
如果同步发电机定义的9个参数的初始条件被设置为零或者未被正确设置,仿真将无法在稳定状态启动。
2、为了在稳定状态下开始仿真,你必须初始化为所需的负载潮流的同步电机块。
打开PowerGUI的选择潮流和机器初始化工具。
设备母线类型应该是已经初始化为PV发电机,表明负载潮流可进行发电机有功功率和它的端电压的控制。
通过输入以下参数指定所需的值:端电压:U AB=13800V(rms)、有功功率:150MW 然后单击更新潮流按钮。
一旦负载潮流已经解决,该发电机线电压和相电流流出发电机。
发电机无功功率,机械功率,并要求供应电功率励磁电压也应显示:无功功率= 3.4 Mvar、机械功率= 150.32 MW (0.7516 pu)、励磁电压Vf = 1.291 pu3、为了在稳定状态下开始仿真,发电机与HTG和励磁系统连接,这两个的Simulink®模块还必须根据由负载潮流计算的值进行初始化。
当您执行潮流分析这个初始化是自动进行的,只要你用常量模块或来自电机库的调节块HTG,STG,或励磁系统连接发电机Pm和Vf输入端连接。
打开HTG块菜单并注意初始的机械功率通过负载潮流自动被设置为0.7516 PU(150.32万千瓦)。
然后,打开励磁系统块菜单并注意初始的端电压和励磁电压已设置分别为1.0和1.1291 PU。
收稿日期:2002 08 28; 修订日期:2003 01 22作者简介:张晓英(1973 ),女,四川仁寿人,甘肃工业大学电信学院讲师,主要从事电力系统自动化研究.文章编号:1001 5485(2003)03 0059 03SIM U LINK 在水轮机调节系统仿真中的应用张晓英1,张明光1,杨新华1,雷践仁2(1.甘肃工业大学电信学院,甘肃兰州 730050;2.西安启元自控技术研究所,陕西西安 710048)摘要:在小波动范围内,建立了水轮机调节系统各部分的数学模型,采用SI M UL IN K 仿真软件对水轮机调节系统在1%频率扰动和机组突减30%负荷情况下的动态特性进行了仿真分析。
通过仿真,整定了水轮机调节系统空载频率扰动过程中,暂态转差系数b t =0.4,暂态反馈时间常数T d =2.95和负荷扰动过程中b t =0.5,T d =2.95的最佳调节参数,获得水轮机调节系统良好的快速性和稳定性。
结果表明,利用SIM U L INK 仿真软件对水轮机调节系统进行仿真研究,方便、灵活。
关 键 词:水轮机调节系统;SIM U LI NK ;仿真;动态特性;参数整定中图分类号:T P391.9 文献标识码:A水轮机调节系统是一个包含有引水泄水系统、水轮机、发电机、电网、调速器等环节的闭环调节系统,通常由水轮机、发电机,调速器3大部分组成[1]。
在研究和设计水轮机调节系统时,除了进行理论分析和计算外,常常还需要进行实验研究。
由于水轮机调节系统调节对象的参数和形式随电站条件不同而不同,在实验室内建立调节对象的物理模型进行试验,既费时又费钱,另外,现场原型试验更是受许多客观条件的限制。
因此,目前广泛采用计算机仿真来进行先期研究,这种方法具有经济、安全、快速的特点。
以往人们对水轮机调节系统进行仿真,大多采用Basic,Fortran,C,C ++等算法语言来编制仿真程序,编程复杂,而且受上述算法语言的绘图功能的限制,要绘出仿真曲线就得调用相应的软件包来作进一步的处理,使得编制、调试程序更复杂[2]。
另外,过去建立仿真模型往往是以系统的状态方程为基础的,在仿真前需要手工求出系统的状态方程。
而水轮机调节系统是一个比较复杂的系统,求取状态方程有一定的难度,若系统结构发生变化,则需要重写状态方程,仿真程序的修改工作量很大,仿真模型的利用率低。
采用当今国际上流行的SIM ULINK 仿真软件进行水轮机调节系统的仿真,上述问题便迎刃而解。
1 SIM U L IN K 仿真软件简介SIM ULINK 是一个用来对动态系统进行建模、仿真和分析的软件包,它支持连续、离散及两者混合的线性和非线性系统。
最突出的特点是实现了可视化建模,即在Window s 界面下,直接用鼠标 画 出所需要的控制系统模型。
它有着丰富的模型库,一般在控制系统的分析与设计中遇到的模块几乎都可以从模型库中找到。
采用Scope 模块和其他的画图模块,在仿真进行的同时就可观看到仿真结果,模型和参数的修改都很方便。
2 水轮机调节系统的数学模型水轮机调节系统通常由水轮机、发电机和调速器3大部分组成,其系统方块图如图1所示。
图1 水轮机调节系统方块图Fig.1 T he hydr o turbine governing system block diag ram建立各部分的数学模型:(1)水轮机当把水击作为刚性水击考虑时,水轮机的传递函数为G s (s)=E y1-ET w s1+E qh T w s,式中:E y 为水轮机力矩对导叶开度传递系数;E qh 为水轮机流量对水头的传递系数;T w为水流惯性时间常数。
第20卷第3期长 江 科 学 院 院 报Vol.20N o.32003年6月Journal of Yangtze River Scientific Research Institute Jun.2003(2)发电机在水轮机调节系统分析计算中,常把发电机模型简化为一阶模型。
此时发电机仅作为具有一定惯量的旋转刚体来考虑,其传递函数为G f (s)=1T a s +E n,式中:T a 为机组的转动惯量;E n 为发电机综合自调节系数。
(3)调速器文中调节系统所采用的是缓冲PI 型调速器,其简化的方块图如图2所示。
图2 缓冲P I 型调速器简化方块图F ig.2 Simplified block diagr am of the P I governor其中:T y 为接力器反应时间常数;b p 为永态转差系数;b t 为暂态转差系数;T d 为暂态反馈时间常数。
3 仿真研究根据以上所建数学模型,现用SIMU LINK 模型库来建立水轮机调节系统的仿真模型,如图3所示。
图3 水轮机调节系统的SIM U L INK 仿真模型Fig.3 SIM U LI NK mo del of the hydroturbine governing system3.1 频率扰动仿真研究对水轮机调节系统频率扰动过程进行仿真,主要是为了研究水轮机调节系统的动态特性,求得机组在空载运行时的最佳调节参数,从而使机组在调节过程中满足快速性和稳定性的要求。
为研究频率扰动过程中,暂态转差系数b t 和暂态反馈时间常数T d 对整个调节系统动态性能的影响,并确定最佳调节参数,现对某一电站频扰过程进行了计算机仿真。
由电站设计资料提供:T y =0.1s,b p =0.04,T w =1s,E y =0.7,E =1.1,E qh =0.45,T a =5s,E n =1.5。
当频率扰动值f c =1%时,反复修改调节参数b t 和T d ,多次进行仿真,得出4组较典型的转速响应曲线,如图4所示,其过渡过程特征值,列于表1中。
图4 不同b t 和T d 值下的转速响应曲线Fig.4 Speed r esponses under different b t and T d表1 系统转速响应过程特征值T able 1 Characteristic v alues of rotationalspeed r esponse process图号b t Td调节时间T s /s 超调量Y p /%振荡次数Na 0.21 1.83463.33b 0.21 2.952658.52c 0.40 2.95600.5d0.703.1120.5由仿真结果可知:在其他参数相同的情况下,当频率扰动值f c =1%时,适当加大b t 和T d ,调节系统的稳定性和快速性有所增强。
然而,当b t 和T d 增大到一定值(b t =0.4,T d =2.95)后,再增加b t 和T d 的值,稳定性变化不大,但调节时间明显延长。
经过多次仿真,得出该电站在1%频率扰动下的最佳调节参数为b t =0.4,T d =2.95。
3.2 负荷扰动仿真研究通过对调节系统负荷扰动过程的仿真研究,找出可能达到的最佳调节过程,从而选择在带负荷时的最佳调节参数,以满足在带负荷过程中对调节快速性和稳定性的要求。
图5给出了机组突减30%负荷时,不同调节参数下的接力器行程响应曲线,其过渡过程特征值列于表2。
60长江科学院院报2003年图5 甩30%负荷接力器响应曲线F ig.5 Responses of servo positioner for 30%load rejectio n表2 接力器行程响应过程特征值T able 2 Charactaristic v alues of response precess of servo positioner图号b t T d 调节时间T s /s 超调量Y p /%振荡次数Na 0.50 2.51137.50.5b 0.50 2.95600c 0.39 2.95938.20.5d0.802.9512比较图5中(a)和(b)可得,机组突甩30%负荷时,在其他参数都相同的条件下,使T d 由2.5增大到2.95,调节时间由11s 减小到6s,超调量和振荡次数分别由原来的37.5%和0.5次均减小为0,即调节系统的快速性和稳定性都有所增强;比较图5中(b)和(c)可得,在其他参数都相同的条件下,增大b t ,调节系统的快速性和稳定性也有所增强。
由图5(b)和(d)比较可得,当b t 和T d 增大到一定程度后再增加,系统的动态特性变差。
因此,由仿真结果可知:当机组突甩30%负荷,b t =0.5,T d =2.95时,调节系统的稳定性和快速性最佳。
4 结 语仿真结果表明,SIM ULINK 仿真软件具有可视化建模和图形输出的能力,用它进行仿真,可以大大减小编程量,而且仿真结果与现场试验所得结论基本吻合,因此非常适合水轮机调节系统的仿真研究,并对复杂水轮机调节系统的研究和设计具有重要的指导意义。
参考文献:[1] 沈祖诒.水轮机调节[M ].北京:水力电力出版社,1988.[2] 陈嘉谋.水轮机调节系统计算机仿真[M ].北京:水力电力出版社,1993.[3] 施 阳,严卫生.MA T LA B 语言精要及动态仿真工具SIM U L IN K[M ].西安:西北工业大学出版社,1999.(编辑:陈绍选)Application of SIMULINK in simulation ofhydro turbine governing systemZHANG Xiao ying 1,ZHANG Ming guang 1,YANG Xin hua 1,LEI Jian ren 2(1.College of Electrical and Information Engineering,Gansu University of Technology ,Lanzhou 730050,China;2.Xi an Qiyuan Automation Technical Research Institute,Xi an 710048,China)Abstract :The m athem atic model of the hydro turbine governing system is established in a small disturbed motionrange.A research using SIMULINK to analyze the dynamic characteristic of the hydro turbine governing system w ith 1%frequency disturbance and 30%load rejection is carried out.The optimal governing parameters in the processes of frequency disturbance in w hich the transient rotational difference coefficient b t is equal to 0.4and the transient feedback time constant T d , 2.95and of load disturbance in w hich b t equals 0.5and T d ,2.95are all adjusted and the favorable dynamic characteristics in aspects of fastness and stability of the governing system are obtained by sim ulation.The results indicate that the model is convenient and flexible to simulate the hydro turbine g overning system using the SIMU LINK softw are.Key words:hydro turbine governing system;SIM ULINK;simulation;dynamic characteristics;parameters adjusting61第3期张晓英等 SIM U L IN K 在水轮机调节系统仿真中的应用。