减速器英语文献
- 格式:doc
- 大小:93.50 KB
- 文档页数:2

The Narrative Style of the GearboxIn the intricate machinery of life, the gearbox stands as a silent yet indispensable component. Its narrative style is one that is both calculated and harmonious, a symphony of precision and adaptability. The gearbox does not speak in words, but rather in the language of gears and shafts, transmitting power while adjusting speed and torque.At first glance, the gearbox appears to be a rigid structure, its exterior unyielding and fixed. But upon closer inspection, one discovers a world of intricate movements and interactions. Each gear, whether large or small, plays a crucial role in the overall functionality of the system. They mesh together, sometimes smoothly, sometimes with a groan of effort, but always with the singular purpose of converting and distributing power.The narrative of the gearbox is one of cooperation and compromise. It tells a story of how different parts, each with its own unique shape and size, can work together to achieve a common goal. There are no heroes or villains in this narrative;each gear is equally important, and none can be dispensed with. The larger gears, though powerful, rely on the smaller ones to complete the circuit of power. And the smaller gears, though seemingly insignificant, are essential for the smooth operation of the entire system.But the narrative of the gearbox is not just about cooperation; it is also about adaptability. The gearbox is designed to respond to changing conditions, adjusting the ratio of input to output as needed. Whether the load increases or decreases, the gearbox finds a way to maintain a balance, ensuring that power is always delivered efficiently.This adaptability is reflected in the gearbox's narrative style. It is a story of flexibility and resilience, of how a system can adjust to external forces and still maintain its integrity. The gears may shift and grind against each other, but they never break. Instead, they find a new equilibrium, a new way to work together.In the end, the narrative style of the gearbox is a powerful metaphor for life itself. It teaches us about the importance ofcooperation and compromise, of working together to achieve common goals. It reminds us that even in the face of change and challenge, we can find a way to adapt and persevere.And so, as we navigate the complexities of our own lives, we can learn from the silent wisdom of the gearbox. We can emulate its narrative style, finding harmony in diversity, strength in cooperation, and resilience in adaptability. For in the end, it is not the individual parts that matter most, but the way they work together to create a beautiful and functional whole.**减速器的叙事风格**在生活的复杂机械中,减速器作为一个沉默但不可或缺的部分而存在。
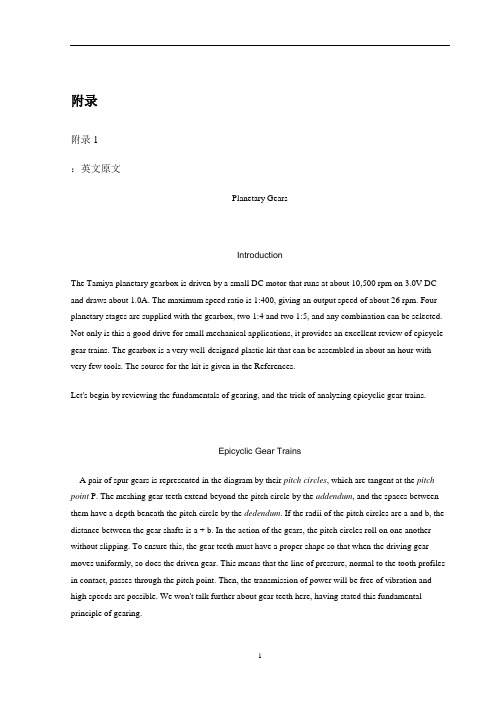
附录附录1:英文原文Planetary GearsIntroductionThe Tamiya planetary gearbox is driven by a small DC motor that runs at about 10,500 rpm on 3.0V DC and draws about 1.0A. The maximum speed ratio is 1:400, giving an output speed of about 26 rpm. Four planetary stages are supplied with the gearbox, two 1:4 and two 1:5, and any combination can be selected. Not only is this a good drive for small mechanical applications, it provides an excellent review of epicycle gear trains. The gearbox is a very well-designed plastic kit that can be assembled in about an hour with very few tools. The source for the kit is given in the References.Let's begin by reviewing the fundamentals of gearing, and the trick of analyzing epicyclic gear trains.Epicyclic Gear TrainsA pair of spur gears is represented in the diagram by their pitch circles, which are tangent at the pitch point P. The meshing gear teeth extend beyond the pitch circle by the addendum, and the spaces between them have a depth beneath the pitch circle by the dedendum. If the radii of the pitch circles are a and b, the distance between the gear shafts is a + b. In the action of the gears, the pitch circles roll on one another without slipping. To ensure this, the gear teeth must have a proper shape so that when the driving gear moves uniformly, so does the driven gear. This means that the line of pressure, normal to the tooth profiles in contact, passes through the pitch point. Then, the transmission of power will be free of vibration and high speeds are possible. We won't talk further about gear teeth here, having stated this fundamental principle of gearing.If a gear of pitch radius a has N teeth, then the distance between corresponding points on successive teeth will be 2πa/N, a quantity called the circular pitch. If two gears are to mate, the circular pitches must be the same. The pitch is usually stated as the ration 2a/N, called the diametral pitch. If you count the number of teeth on a gear, then the pitch diameter is the number of teeth times the diametral pitch. If you know the pitch diameters of two gears, then you can specify the distance between the shafts.The velocity ratio r of a pair of gears is the ratio of the angular velocity of the driven gear to the angular velocity of the driving gear. By the condition of rolling of pitch circles, r = -a/b = -N1/N2, since pitch radii are proportional to the number of teeth. The angular velocity n of the gears may be given in radians/sec, revolutions per minute (rpm), or any similar units. If we take one direction of rotation as positive, then the other direction is negative. This is the reason for the (-) sign in the above expression. If one of the gears is internal (having teeth on its inner rim), then the velocity ratio is positive, since the gears will rotate in the same direction.The usual involute gears have a tooth shape that is tolerant of variations in the distance between the axes, so the gears will run smoothly if this distance is not quite correct. The velocity ratio of the gears does not depend on the exact spacing of the axes, but is fixed by the number of teeth, or what is the same thing, by the pitch diameters. Slightly increasing the distance above its theoretical value makes the gears run easier, since the clearances are larger. On the other hand, backlash is also increased, which may not be desired in some applications.An epicyclic gear train has gear shafts mounted on a moving arm or carrier that can rotate about the axis, as well as the gears themselves. The arm can be an input element, or an output element, and can be held fixed or allowed to rotate. The outer gear is the ring gear or annulus. A simple but very common epicyclic train is the sun-and-planet epicyclic train, shown in the figure at the left. Three planetary gears are used for mechanical reasons; they may be considered as one in describing the action of the gearing. The sun gear, the arm, or the ring gear may be input or output links.If the arm is fixed, so that it cannot rotate, we have a simple train of three gears. Then, n2/n1 = -N1/N2, n3/n2 = +N2/N3, and n3/n1 = -N1/N3. This is very simple, and should not be confusing. If the arm is allowed to move, figuring out the velocity ratios taxes the human intellect. Attempting this will show the truth of the statement; if you can manage it, you deserve praise and fame. It is by no means impossible, just invoved. However, there is a very easy way to get the desired result. First, just consider the gear train locked, so it moves as a rigid body, arm and all. All three gears and the arm then have a unity velocity ratio.The trick is that any motion of the gear train can carried out by first holding the arm fixed and rotating the gears relative to one another, and then locking the train and rotating it about the fixed axis. The net motion is the sum or difference of multiples of the two separate motions that satisfies the conditions of the problem (usually that one element is held fixed). To carry out this program, construct a table in which the angular velocities of the gears and arm are listed for each, for each of the two cases. The locked train gives 1, 1, 1, 1 for arm, gear 1, gear 2 and gear 3. Arm fixed gives 0, 1, -N1/N2, -N1/N3. Suppose we want the velocity ration between the arm and gear 1, when gear 3 is fixed. Multiply the first row by a constant so that when it is added to the second row, the velocity of gear 3 will be zero. This constant is N1/N3. Now, doing one displacement and then the other corresponds to adding the two rows. We find N1/N3, 1 + N1/N3, N1/N3 -N1/N2.The first number is the arm velocity, the second the velocity of gear 1, so the velocity ratio between them is N1/(N1 + N3), after multiplying through by N3. This is the velocity ratio we need for the Tamiya gearbox, where the ring gear does not rotate, the sun gear is the input, and the arm is the output. The procedure is general, however, and will work for any epicyclic train.One of the Tamiya planetary gear assemblies has N1 = N2 = 16, N3 = 48, while the other has N1 = 12,N2 = 18, N3 = 48. Because the planetary gears must fit between the sun and ring gears, the condition N3 = N1 + 2N2 must be satisfied. It is indeed satisfied for the numbers of teeth given. The velocity ratio of the first set will be 16/(48 + 16) = 1/4. The velocity ratio of the second set will be 12/(48 + 12) = 1/5. Both ratios are as advertised. Note that the sun gear and arm will rotate in the same direction.The best general method for solving epicyclic gear trains is the tabular method, since it does not contain hidden assumptions like formulas, nor require the work of the vector method. The first step is to isolate the epicyclic train, separating the gear trains for inputs and outputs from it. Find the input speeds or turns, using the input gear trains. There are, in general, two inputs, one of which may be zero in simple problems. Now prepare two rows of the table of turns or angular velocities. The first row corresponds to rotating around the epicyclic axis once, and consists of all 1's. Write down the second row assuming that the arm velocity is zero, using the known gear ratios. The row that you want is a linear combination of these two rows, with unknown multipliers x and y. Summing the entries for the input gears gives two simultaneous linear equations for x and y in terms of the known input velocities. Now the sum of the two rows multiplied by their respective multipliers gives the speeds of all the gears of interest. Finally, find the output speed with the aid of the output gear train. Be careful to get the directions of rotation correct, with respect to a direction taken as positive.The Tamiya Gearbox KitThe parts are best cut from the sprues with a flush-cutter of the type used in electronics. The very small bits of plastic remaining can then be removed with a sharp X-acto knife. Carefully remove all excess plastic, as the instructions say.Read the instructions carefully and make sure that things are the right way up and in the correct relative positons. The gearbox units go together easily with light pressure. Note that the brown ones must go together in the correct relative orientation. The 4mm washers are the ones of which two are supplied, and there is also a full-size drawing of one in the instructions. The smaller washers will not fit over the shaft, anyway. The output shaft is metal. Use larger long-nose pliers to press the E-ring into position in its groove in front of the washer. There is a picture showing how to do this. There was an extra E-ring in my kit. The three prongs fit into the carriers for the planetary gears, and are driven by them.Now stack up the gearbox units as desired. I used all four, being sure to put a 1:5 unit on the end next to the motor. Therefore, I needed the long screws. Press the orange sun gear for the last 1:5 unit firmly on the motor shaft as far as it will go. If it is not well-seated, the motor clip will not close. It might be a good idea to put some lubricant on this gear from the tube included with the kit. If you use a different lubricant, test it first on a piece of plastic from the kit to make sure that it is compatible. A dry graphite lubricant would also work quite well. This should spread lubricant on all parts of the last unit, which is the one subject to the highest speeds. Put the motor in place, gently but firmly, wiggling it so that the sun gear meshes. If the sun gear is not meshed, the motor clip will not close. Now put the motor terminals in a vertical column, and press on the motor clamp.The reverse of the instructions show how to attach the drive arm and gives some hints on use of the gearbox. I got an extra spring pin, and two extra 3 mm washers. If you have some small washers, they can be used on the machine screws holding the gearbox together. Enough torque is produced at the output to damage things (up to 6 kg-cm), so make sure the output arm can rotate freely. I used a standard laboratory DC supply with variable voltage and current limiting, but dry cells could be used as well. The current drain of 1 A is high even for D cells, so a power supply is indicated for serious use. The instructions say not to exceed 4.5V, which is good advice. With 400:1 reduction, the motor should run freely whatever the output load.My gearbox ran well the first time it was tested. I timed the output revolutions with a stopwatch, and found 47s for 20 revolutions, or 25.5 rpm. This corresponds to 10,200 rpm at the motor, which is close tospecifications. It would be easy to connect another gearbox in series with this one (parts are included to make this possible), and get about 4 revolutions per hour. Still another gearbox would produce about one revolution in four days. This is an excellent kit, and I recommend it highly.Other Epicyclic TrainsA very famous epicyclic chain is the Watt sun-and-planet gear, patented in 1781 as an alternative to the crank for converting the reciprocating motion of a steam engine into rotary motion. It was invented by William Murdoch. The crank, at that time, had been patented and Watt did not want to pay royalties. An incidental advantage was a 1:2 increase in the rotative speed of the output. However, it was more expensive than a crank, and was seldom used after the crank patent expired. Watch the animation on Wikipedia.The input is the arm, which carries the planet gear wheel mating with the sun gear wheel of equal size. The planet wheel is prevented from rotating by being fastened to the connecting rod. It oscillates a little, but always returns to the same place on every revolution. Using the tabular method explained above, the first line is 1, 1, 1 where the first number refers to the arm, the second to the planet gear, and the third to the sun gear. The second line is 0, -1, 1, where we have rotated the planet one turn anticlockwise. Adding, we get 1, 0, 2, which means that one revolution of the arm (one double stroke of the engine) gives two revolutions of the sun gear.We can use the sun-and-planet gear to illustrate another method for analyzing epicyclical trains in which we use velocities. This method may be more satisfying than the tabular method and show more clearly how the train works. In the diagram at the right, A and O are the centres of the planet and sun gears, respectively. A rotates about O with angular velocity ω1, which we assume clockwise. At the position shown, this gives A a velocity 2ω1 upward, as shown. Now the planet gear does not rotate, so all points in it move with the same velocity as A. This includes the pitch point P, which is also a point in the sun gear, which rotates about the fixed axis O with angular velocity ω2. Therefore, ω2= 2ω1, the same result as with the tabular method.The diagram at the left shows how the velocity method is applied to the planetary gear set treated above. The sun and planet gears are assumed to be the same diameter (2 units). The ring gear is then of diameter 6. Let us assume the sun gear is fixed, so that the pitch point P is also fixed. The velocity of point A is twice the angular velocity of the arm. Since P is fixed, P' must move at twice the velocity of A, or four times the velocity of the arm. However, the velocity of P' is three times the angular velocity of the ring gearas well, so that 3ωr= 4ωa. If the arm is the input, the velocity ratio is then 3:4, while if the ring is the input, the velocity ratio is 4:3.A three-speed bicycle hub may contain two of these epicyclical trains, with the ring gears connected (actually, common to the two trains). The input from the rear sprocket is to the arm of one train, while the output to the hub is from the arm of the second train. It is possible to lock one or both of the sun gears to the axle, or else to lock the sun gear to the arm and free of the axle, so that the train gives a 1:1 ratio. The three gears are: high, 3:4, output train locked; middle, 1:1, both trains locked, and low, 4:3 input train locked. Of course, this is just one possibility, and many different variable hubs have been manufactured. The planetary variable hub was introduced by Sturmey-Archer in 1903. The popular AW hub had the ratios mentioned here.Chain hoists may use epicyclical trains. The ring gear is stationary, part of the main housing. The input is to the sun gear, the output from the planet carrier. The sun and planet gears have very different diameters, to obtain a large reduction ratio.The Model T Ford (1908-1927) used a reverted epicyclic transmission in which brake bands applied to the shafts carrying sun gears selected the gear ratio. The low gear ratio was 11:4 forward, while the reverse gear ratio was -4:1. The high gear was 1:1. Reverted means that the gears on the planet carrier shaft drove other gears on shafts concentric with the main shaft, where the brake bands were applied. The floor controls were three pedals: low-neutral-high, reverse, transmission brake. The hand brake applied stopped theleft-hand pedal at neutral. The spark advance and throttle were on the steering column.The automotive differential, illustrated at the right, is a bevel-gear epicyclic train. The pinion drives the ring gear (crown wheel) which rotates freely, carrying the idler gears. Only one idler is necessary, but more than one gives better symmetry. The ring gear corresponds to the planet carrier, and the idler gears to the planet gears, of the usual epicyclic chain. The idler gears drive the side gears on the half-axles, which correspond to the sun and ring gears, and are the output gears. When the two half-axles revolve at the same speed, the idlers do not revolve. When the half-axles move at different speeds, the idlers revolve. The differential applies equal torque to the side gears (they are driven at equal distances by the idlers) while allowing them to rotate at different speeds. If one wheel slips, it rotates at double speed while the other wheel does not rotate. The same (small) torque is, nevertheless, applied to both wheels.The tabular method is easily used to analyze the angular velocities. Rotating the chain as a whole gives 1, 0, 1, 1 for ring, idler, left and right side gears. Holding the ring fixed gives 0, 1, 1, -1. If the right side gear isheld fixed and the ring makes one rotation, we simply add to get 1, 1, 2, 0, which says that the left side gear makes two revolutions. The velocity method can also be used, of course. Considering the (equal) forces exerted on the side gears by the idler gears shows that the torques will be equal.ReferencesTamiya Planetary Gearbox Set, Item 72001-1400. Edmund Scientific, Catalog No. C029D, itemD30524-08 ($19.95).C. Carmichael, ed., Kent's Mechanical Engineer's Handbook, 12th ed. (New York: John Wiley and Sons, 1950). Design and Production Volume, p.14-49 to 14-43.V. L. Doughtie, Elements of Mechanism, 6th ed. (New York: John Wiley and Sons, 1947). pp. 299-311.Epicyclic gear. Wikipedia article on epicyclic trains.Sun and planet gear. Includes an animation.英文译文介绍Tamiya行星轮变速箱由一个约 10500 r/min,3.0V,1.0A的直流电机运行。

减速器论文中英文对照资料外文翻译文献What is a Gearbox?A XXX.1.The n of a Gearbox1) The gearbox ces the speed while increasing the output torque。
The torque output。
is the motor output multiplied by the n。
but it should not exceed the XXX.2) The gearbox also ces the inertia of the load。
which decreases by the square of the n。
Most motors have an inertia value that can be XXX.2.Types of GearboxesCommon gearboxes include bevel gear cers (including parallel-axis bevel gear cers。
worm gear cers。
and cone gear cers)。
ary gear cers。
cycloid cers。
worm gear cers。
XXX.mon Gearboxes1) The main feature of the worm gear cer is its reverse self-locking n。
which can achieve a large n。
The input and output shafts are not on the same axis or in the same plane。
However。
it generally has a large volume。
low n efficiency。
and low n.2) XXX and power。
It has a small size and high n。
Mitigation of loss within a molecular Stark deceleratorEric R. Hudson Department of Physics, Yale University, New Haven, CT 06520, USA (Dated: February3,2008)The transverse motion inside a Stark decelerator plays a large role in the total e fficiency of deceleration. We di fferentiate between two separate regimes of molecule loss during the slowing process. The first mechanismin volves distributedloss due to coupling of transverseand longitudinal motion,while the second is a resul to futher apiddecrease of themolecularvelocity within the final fewstages. Inthiswork,wedescribethesee ffectsandpresentmeansforovercomingthem. Solutions based on modi fied switching time sequences with the existing decelerator geometry lead to a large gainofstablemoleculesintheintermediatevelocityregime,butfailtoaddressthelossatverylow final velocities. We propose a new decelerator design, the quadrupole-guiding decelerator, which eliminatesdistributedlossduetotransverse/longitudinalcouplingsthroughouttheslowingprocess andalsoexhibitsgainovernormaldecelerationtothelowestvelocities.PACSnumbers: 33.55.Be,39.10.+j,39.90.+dI. INTRODUCTIONstatepolarmolecules(∼109cm −3),albeitathighpacket velocities. One limitation of this technique for trapping of decelerated molecules is an observed drastic loss of slowedmoleculesatverylowmeanvelocitiesinbothour owngroup’sworkandtheBerlingroupofG.Meijer[13]. WeaddressthisprobleminthisArticle. Recent development of cold polar-molecule sources promises to reveal many interesting, and hitherto unex- plored,molecularinteractiondynamics. Thepermanent electricdipolemomentpossessedbypolarmoleculespro- videsanewtypeofinteractionintheultracoldenviron- ment. Thiselectricdipole-dipoleinteraction(andcontrol overit)shouldgiverisetouniquephysicsandchemistry including novel cold-collision dynamics [1, 2] and quan- tuminformationprocessing[3]. As the leading method for producing cold samples of chemicallyinterestingpolarmolecules,Starkdeceleration hasgeneratedcoldsamplesofCO[9],ND [14],OH[15– 3 18], YbF [19], H CO [2], NH [20], and SO [21], lead- 2 2 ing to the trapping of both ND [14] and OH [18, 22]. 3 GiventheimportanceofStarkdecelerationtothestudy of cold molecules, it is crucial that the technique be re- finedtoachievemaximumdeceleratione fficiency. Inthis work,weprovideadetaileddescriptionofprocessesthat limit the e fficiency of current decelerators and propose methodsforovercomingthem. Weproposepossiblesolu- tionstotheparametrictransverse/longitudinalcoupling loss originally highlighted in Ref. [23], as well as elu- cidate a new loss mechanism unique to producing the slowestmolecules. Werestrictthedescribedsimulations and theory to Stark decelerated, ground-state OH radi- cals,asthesupportingexperimentaldatawastakenwith this molecular species. However, the loss mechanisms described herein are not speci fic to OH, and represent a general limitation of current Stark decelerators. This reduces the e fficiency of Stark decelerators for trapping coldpolarmolecules. To date, cold polar-molecule samples have been produced most successfully via three different mecha- nisms: bu ffer gas cooling [4, 10]; photo- and magneto- association [5–8]; and Stark deceleration [9]. Bu ffer gas cooling achieves temperatures below 1 K through ther- malizationofmoleculeswithaHebu ffer. Thistechnique produces relatively large densities (108 cm −3) of polar ground-state molecules. However, cooling below ∼ 100 mK has not yet been achieved because the He bu ffer gas has not been removed quickly enough for evapora- tive cooling [10]. Photoassociation achieves the lowest molecular temperatures of these techniques (∼100 µK), but is limited to molecules whose atomic constituents are amenable to laser-cooling. Furthermore, molecules in their ground vibrational state are not readily pro- duced,yieldingspecieswithrelativelysmalle ffectiveelec- tricdipoles,althoughthisproblemcanbeovercomewith moresophisticatedlasercontroltechniques[6,11]. Stark deceleration exists as an alternative to these methods as the technique employs well-characterized supersonic beam methods [12] to produce large densities of ground This Article is organized as follows. Section II de- scribes the mechanisms responsible for molecular loss at low velocities. Sections III, IV, and V present methods of producing molecular packets at intermedi- atevelocities(>100m/s)withoutthedistributedtrans- verse/longitudinalcouplinglossesofRef.[23]. However, these methods exacerbate the problem of low-velocity loss. Therefore, we propose a new decelerator design in ∗*********************2SectionVIthatexhibitsgainoverconventionalStarkde- celerationtovelocitiesaslowas14m/s.II. LOSS AT LOW VELOCITIESInmuchofthepreviousworkonStarkdeceleration,it isassumedthatallmotionparallelandtransversetothe decelerator axis is stable up to some maximum excur- sionvelocityandpositionfromthebeamcenter[17,24], enabling the derivation of an analytical solution to pre- dict stable-molecule phase-space area. However, there are several important instances where the assumptions of this model become invalid. In the case of very slow molecules (<50 m/s) [31], we observe two distinct phe- nomena leading to reduced decelerator e fficiency at the finaldecelerationstages: transverseoverfocusingandlon- gitudinalre flection. Transverseoverfocusingoccurswhen thedeceleratedmolecules’speedbecomessolowthatthe decelerating electrodes focus the molecules too tightly (transversely)andtheyeithermakecontactwiththeelec- trodes or are strongly dispersed upon exiting the decel- erator. Longerdeceleratorstendtoexacerbatethise ffect duetothefactthatmoleculescantravelatlowspeedsfor many stages. Nonetheless, there are several motivating factorsforconstructingalongerdecelerator. First,longer decelerators allow less energy per stage to be removed andconsequentlyleadtolargerlongitudinalphase-space acceptance. Second, a longer decelerator may allow de- celeration of molecules possessing an unfavorable Stark shifttomassratio. Wewilldiscusscriticalissuesforuse ofsuchlongdeceleratorsforslowmoleculeproduction. A second low-velocity e ffect, which we have denoted “longitudinalre flection,”isadirectresultofthespatial inhomogeneity of the electric field at the final decelera- tion stage. As highlighted in the context of transverse guidanceinRef.[23],thelongitudinalpotentialislargest forthosemoleculespassing –inthetransversedimension – nearest to the decelerator rods. However, the decelera- tor switching sequence is generally only synchronous to a molecule on-axis traveling at the mean speed of the packet. Asaresult, whenthemeanlongitudinalkinetic energy of the slowed packet becomes comparable to the Stark potential barrier at the last stage, molecules o ff- axis can be stopped or re flected, resulting in a spatial filtering e ffect. Furthermore, the longitudinal velocity spreadofthemolecularpacketatthe finalstage,iflarger thanthe finalmeanvelocity,canleadtore flectionofthe slowest portion of the packet. It is important that the phenomenaofoverfocusingandlongitudinalre flectionbe addressedsincemoleculetrapsfedbyStarkdecelerators requireslowpacketsfore fficientloading. FIG. 1: (color online) (a) Simulations of the phase-stable molecule number as a function of stage number in our 142- stage decelerator. Note the dramatic decrease in number in the last several stages for φo =30.43◦. This decrease is due totransverseoverfocusingandlongitudinalre flectionofthese slow (14 m/s) molecules. (b) Simulated transverse (trace 1) andlongitudinal(trace2)fractionallossratesasafunctionof timewithinthe finalthreestagesat φo =30.43◦. Thevertical dashedlinesdenotethetimesofthegivenstageswitches. versus increasing phase angle. In Fig. 3, the dark lines repre- senttheseparatrix,partitioningstabledecelerationphase spacefromthatofunstablemotionascalculatedfromEq. 2inRef.[17]. Eachdotrepresentsthepositioninphase space of a simulated molecule. In the absence of cou- pling between the longitudinal and transverse motions, onewouldexpecttheentireareainsidetheseparatrixto be occupied. Therefore, thestructureinthesegraphsis evidenceoftheimportanceofthetransversemotion. In the left column of Fig. 3, the coupling of longi- tudinal and transverse motions is responsible for two e ffects [33]: First, in the center of the stable area at = 0◦–near the synchronous molecule –the density of φ 0 stable molecules is less than in the surrounding area. This is because molecules that oscillate very near the synchronous molecule experience little transverse guid- ing. Thise ffectisnotdramaticandisonlydiscernablefor anexceedinglylargenumberofstages. Furthermore,this e ffectisevenlessimportantfortheincreasedphaseangles typically used for deceleration, since for these switching sequencesthesynchronousmoleculeexperiencesmoreof thetransverseguidingforcesthanitdoesduringbunch- ing. The second e ffect, which is much more evident, is the absence of molecules at intermediate distances from the synchronous molecule as shown in the left column of Fig 3. This so-called ‘halo’ is due to parametric am - pli ficationofthetransversemotionandissimilartothe e ffectsseenincoldmoleculestoragerings[24]aswellas chargedparticleaccelerators[26]. Essentially,thelongi- tudinaloscillationfrequencyofamoleculeinthisregion is matched to the transverse oscillation frequency, lead- ing to ampli fication of the transverse and longitudinal motionandconsequentloss. leads to loss of 20% of the decelerated molecule num- ber between φ = 30◦ (50 m/s) and φ = 30.43◦ (14 o o m/s). Such a dramatic loss is not predicted by analyt- ical theory, as the stable phase-space area decreases by only <1% over this range of φ . This number is calcu- 0 lateddirectlyafterthedeceleratorisswitched-o ffandis thusanupperbound,sinceexperimentsemployingthese coldmoleculesrequirethemtotraveloutofthedeceler- atorwheretransversespreadcanleadtodramaticlossof moleculenumber. Experimental evidence of this sudden decrease in moleculenumberatverylowvelocitiesisgiveninFig.2, which displays time-of-flight (ToF) spectra along with corresponding Monte Carlo simulation results at vari- ous phase angles. The decelerated OH molecules are in the weak-field seeking |F = 2,m = ±2,−i state. F The first two quantum numbers of the state denote its hyper finecomponents, whilethethirdnumberindicates the parity of the state in the absence of electric fields. Figures 2(b) and (c) illustrate progressive time delays oftheslowedmolecularpacketsfromthebackgroundof non-synchronous molecules. Figures 2(d) and (e) dis- play only the decelerated packets, and the vertical axes oftheseplotsaremagni fiedbyafactorof100. Thedual peaks correspond to molecular packets loaded into two successive stages, and the later peaks represent the in- tended finalvelocities. Thetotaldetectedandsimulated molecule numbers are plotted in Fig. 2(f) as a function of final velocity, along with the theoretically expected decelerator e fficiency (dashed line) [17]. Note that the sudden population decrease in both simulation and ex- perimentalresultsisnotre flectedintheone-dimensional theoreticalmodel,whichdoesnotaccountforthetrans- verse dynamics or field inhomogeneities that cause such behavior. Thise ffectisdetrimentaltotheproductionof densesamplesofcoldmolecules. Toremovetheoverfocusinge ffectatlowvelocities,the transversefocusing ofthelastseveraldeceleratorstages needstobereduced. Di fferenttypesoftransversefocus- ingelementsmaybeinsertedintothedecelerationbeam linetocompensateforthisphenomenon. Thisideaisdis- Thereisacompromisebetweendecreasinglongitudinal phase-space area and increasing transverse guidance for increasing φ . To demonstrate this e ffect, we decelerate 0 moleculestoa fixedv andvarythephaseangleused final to reach this velocity. This is done either by changing。
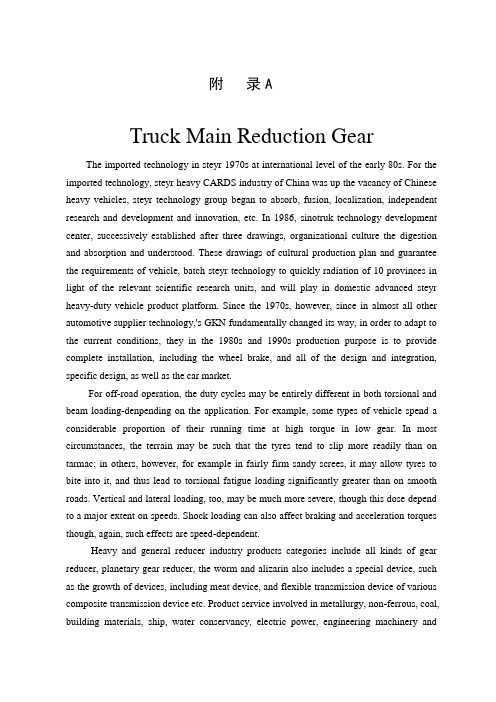
附录ATruck Main Reduction Gear The imported technology in steyr 1970s at international level of the early 80s. For the imported technology, steyr heavy CARDS industry of China was up the vacancy of Chinese heavy vehicles, steyr technology group began to absorb, fusion, localization, independent research and development and innovation, etc. In 1986, sinotruk technology development center, successively established after three drawings, organizational culture the digestion and absorption and understood. These drawings of cultural production plan and guarantee the requirements of vehicle, batch steyr technology to quickly radiation of 10 provinces in light of the relevant scientific research units, and will play in domestic advanced steyr heavy-duty vehicle product platform. Since the 1970s, however, since in almost all other automotive supplier technology,'s GKN fundamentally changed its way, in order to adapt to the current conditions, they in the 1980s and 1990s production purpose is to provide complete installation, including the wheel brake, and all of the design and integration, specific design, as well as the car market.For off-road operation, the duty cycles may be entirely different in both torsional and beam loading-denpending on the application. For example, some types of vehicle spend a considerable proportion of their running time at high torque in low gear. In most circumstances, the terrain may be such that the tyres tend to slip more readily than on tarmac; in others, however, for example in fairly firm sandy screes, it may allow tyres to bite into it, and thus lead to torsional fatigue loading significantly greater than on smooth roads. Vertical and lateral loading, too, may be much more severe, though this dose depend to a major extent on speeds. Shock loading can also affect braking and acceleration torques though, again, such effects are speed-dependent.Heavy and general reducer industry products categories include all kinds of gear reducer, planetary gear reducer, the worm and alizarin also includes a special device, such as the growth of devices, including meat device, and flexible transmission device of various composite transmission device etc. Product service involved in metallurgy, non-ferrous, coal, building materials, ship, water conservancy, electric power, engineering machinery andpetrochemical industries. Heavy and general reducer industry manufacturers also coexist in various forms, such as foreign enterprises, sino-foreign joint ventures, state-owned enterprises, share-holding enterprise and individual enterprise, has large scale to hundreds of millions of yuan, annual small to millions of dollars. Good living conditions, and the product quality control system, perfect the enterprise has more than 100, and the whole industry 2005 sales of approximately 200 million yuan, the sales of foreign-funded enterprises accounted for about one fourth.Domestic reducer of key enterprises industry products, specifications and parameters are covered in recent years, the product quality has reached international advanced level, industrial countries similar products can undertake for national economic sectors provides complete responsibility of transmission device, part of our products are exported to Europe and southeast Asia. The speed reducer is used to reduce the speed increases from transmission torque, and rotating torque changes direction, the differential transmission to half axle. The main reducer is mainly based on structure form, reducer gear types and different forms. The main gear reducer of spiral bevel gears and hypoid gear, cylindrical gears and worm and worm wheel etc .Pair of level host reduction gear is compared with single stage , the gap may be 7 ~12 transmission ratio , i0 each other at the same time in swear to be away from a field 12. But the dimension , mass are without exception bigger , cost is higher. It applies to middle, heavy type freight train , go-anywhere vehicle and motor bus mainly go ahead.Dyadic overall pair of level host reduction gear has the various structure scheme: First order is a cone gear wheel , the second stage is a column gear wheel; First order is a cone gear wheel , the second stage is epicyclic gear; First order is epicyclic gear , the second stage is a cone gear wheel; First order is a column gear wheel , the second stage is a cone gear wheel.Horizontal , askew, face and droop over to the three kinds to first order for the cone gear wheel , the second stage are that pair of column gear wheel level betokens reduction gear, but has direction arrangement scheme.Direction level arrangement can use the assembly drooping over to outline dimension diminution , reducing the automobile quality heart altitude thereby, makes the direction dimension increase by but , that the use on long distance between shafts automobile but appropriate diminution transmission shaft length, is harmful for short distance betweenshafts automobile's to put arrangement together but, may make a transmission shaft short , leads to a universal transmission shaft intersection angle enlarge. Droop over to arranging a messenger to drive the bridge direction dimension diminution, may diminish a universal transmission shaft intersection angle, since but host reduction gear shell fixes superjacent in bridge shell , make not only droop over enhance to outline dimension, and have reduced bridge shell stiffness , have been harmful for gear wheel to work. This arrangement but easy to be versed in style driving a bridge arrangement. Arranging bridge shell stiffness and improving to the transmission shaft is slanting to arrangement advantageous.When assigning a transmission ratio in pair of level host reduction gear having the cone gear wheel and the column gear wheel, the column gear wheel is 1.4 ~ like the ratio auxiliary and boring subsidiary gear wheel transmission ratio 2.0, and the cone gear wheel is 1.7 ~ like subsidiary transmission ratio 3.3, such axial loading may diminish a cone when the gear wheel is engaged and effect loading on the driven cone gear wheel and the column gear wheel, may make the active cone gear wheel tooth number appropriate increasing by at the same time , make whose supporting axis neck dimension appropriate enlarge, To improve whose supporting stiffness, improve falling-in stationarity and the job reliability.For modern axles, choice of gear lubricant can be critical. In cars operating at high speeds on motorways, axle oil temperature can ultimately rise even higher than 130℃,so venting of the casing is important. In principle, the oil in the base of the casting is swept around over the crownwheel and then forwards through the two bearings that carry the pinion. Consequently, both the shapes and dimensions of the clearances between the crownwheel and casing can be critical, and adequate drainage has to be provided for the oil to flow, through channels cored in the pinion bearing housings, back to the base of the casing.Within the gear carrier unit, taper roller bearings are employed almost universally for carrying the input pinion. They have a large load capacity within a small envelope, and can be preloaded for accurate and stable positioning of the gears. For pinion flange seals where resistance to high temperatures at relatively high speeds is essential, polyarcylate may be specified, but the abrasive conditions Viton is generally preferred.That the cone gear wheel tooth goes over width face to face can not enhance gear wheel intensity and life-span , is able to lead to tooth ditch unexpected turn of events small end because of cone gear wheel gear teeth on the contrary narrow the cutting knife the topof the head face width arousing is too narrow and the point of a knife round angle is too small. Like this , not only, have diminished the tooth radical circle radius , have enlarged strain all together, life time having reduced a cutter. Besides , when assembling, have location deviation or wait for cause since fabrication , heat treatment are deformable, loading concentrates minor in gear teeth end when making a gear wheel work , is able to arouse gear teeth holding untimely damage and weary loss for a short time. That besides, the tooth goes over width face to face also is able to arouse assembling space diminution. The flank of a tooth is too narrow but , the gear teeth outside abrasion resistance meeting reduces.For the running-in improving the new gear wheel, prevent the person from dying in working to Model T wear appear on initial stage , bruising , gluing together or barking, cone gear wheel bonderizing being 0.005 ~ 0.020 mm in heat treatment and finish machining aftercrop, thickness handles or the copper facing , the tin plating handle. The ball carrying out strain on the flank of a tooth gushing is sold at reduced prices , may improve 25%'s gear wheel life-span. To the high speed gear wheel sliding, may be in progress a sulfur oozing handling to improve abrasion resistance. Rub a factor but notable sulfur queen lessening oozes, even if lubricating condition is relatively poor , also, can prevent the flank of a tooth bruise from facing , barks to die and glue together.附录B重型车主减速器我国引进的斯太尔技术在当时处于国际20世纪70年代末80年代初的水平。
英文原文:MICRO PLANETARY REDUCTION GEAR USINGSURFACE-MICROMACHININGAbstractA micro planetary gear mechanism featuring a high gear reduction ratio with compactness in size ispresented in this paper. SUMMiT V is employed for the fabrication method so that the redundancy of assembling parts is eliminated. The design rules of which has also been checked. To make full use of the benefits of the surface- micro - machining, the planetary reduction gear is designed toward using the on-chip micro- engine. The expected gearreduction ratio is calculated and compared with the conventional chain gear mechanism. The microplanetary gear mechanism presented in this paper is expected to have 162:1 reduction ratio utilizing less space consumption. This is an order of magnitude higher than the previously reported design in a single reduction gear train.Keywords: MEMS, planetary gear, reduction gear surface-micromachining, SUMMiT V processNomenclaturea sun gearb planet gearsc internal gear (fixed)d internal gear (rotary)n the number of units of gear trainD diameter of the pitch circleN number of teethP number of planetsangular velocityIntroductionThe gear mechanisms in microelectro mechanical systems(MEMS) are commonly expected to generate high torque in the confined micro-size systems. However, it is generally difficult for the micro-scale systems to have such a high torque without having multiple reduction systems.The design of the reduction gear drive based on a planetary paradox gearmechanism can increase the torque within a compact area, since the microplanetary gear system has an advantage of high reduction ratio per unit volume [1]. However its mechanism is so complicated that relatively few attempts have been made to miniaturize the gear systems [2-3]. Suzumori et al. [2] used the mechanical paradox planetary gear mechanism to drive a robot for 1-in pipes forward or backward. They employed a single motor to drive the gear mechanisms with high reduction ratio. Precise gear fabrication was enabled by micro wire electrical discharge machining (micro-EDM). These parts, however, should be assembled before the drive motor is attached to the gearbox. Takeuchi et. al. [3] also used micro-EDM to fabricate the micro planetary gears. They suggested special cermets or High Carbon Steel for possible materials. While the design can achieve a reduction ratio of 200, the gears should also be assembled and motor driven.To enable the driving of the planetary gear by onchip means, Sandia Ultra- planar Multi-level MEMS Technology (SUMMiT-V) process [4] for planetary gear fabrication is adopted in this study. The SUMMiT-V process is the only foundry process available which utilizes four layers of releasable polysilicon, for a total of five layers (including a ground plane) [5]. Due to this fact, it is frequently used in complicated gear mechanisms being driven by on-chip electrostatic actuators [5].However, in many cases, the microengines may not produce enough torque to drive the desired mechanical load, since their electrostatic comb drives typically only generate a few tens of micronewtons of force. Fortunately, these engines can easily be driven at tens of thousands of revolutions per minutes. This makes it very feasible to trade speed for torque [7].Rodgers et al. [7] proposed two dual level gears with an overall gear reduction ratio of 12:1. Thus six of these modular transmission assemblies can have a 2,985,984:1 reduction ratio at the cost of the huge space.With the desire for size compactness and at the same time, high reduction ratios, the planetary gear system is presented in this paper. It will be the first planetary gear mechanism using surface micromachining,to the authors knowledge. The principles of operations of the planetary gear mechanism, fabrication, and the expected performance of the planetary gear systems are described in this paper.Principles of operationAn alternative way of using gears to transmit torque is to make one or moregears, i.e., planetary gears, rotate outside of one gear, i.e. sun gear. Most planetary reduction gears, at conventional size, are used as well-known compact mechanical power transmission systems [1]. The schematic of the planetary gear system employed is shown in FigureSince SUMMiT V designs are laid out using AutoCAD 2000, the Figure 1 is generated automatically from the lay out masks (Appendix [1]). One unit of the planetary gear system is composed of six gears: one sun gear, a, three planetary gears, b, one fixed ring gear, c, one rotating ring gear, d, and one output gear. The number of teeth for each gear is different from one another except among the planetary gears. An input gear is the sun gear, a, driven by the arm connected to the micro-engine. The rotating ring gear, d, is served as an output gear. For example, if the arm drives the sun gear in the clockwise direction, the planetary gears, b, will rotate counter-clockwise at their own axis and at the same time, those will rotate about the sun gear in clockwise direction resulting in planetary motion. Due to the relative motion between the planetary gears, b, and the fixed ring gear, c, the rotating ring gear, d, will rotate counterclockwise direction. This is so called a 3K mechanical paradox planetary gear [1].Fabrication procedure and test structuresThe features of the SUMMiT V process offer four levels of structural polysilicon layers and an electrical poly level, and also employ traditional integrated circuit processing techniques [4]. The SUMMiT V technology is especially suitable for the gear mechanism. The planetary gear mechanism can be driven by the on-chip engine and thus is another reason of using the SUMMiT V process.Since the Sandia process is such a well-known procedure [5-7], only brief explanation is presented. Figure 2 represents the cross-sectional view of Figure 1, and also was generated from the AutoCAD layout masks (Appendix [1]). The discontinuity in the cross-section is for the etch holes. The poly1 (gray) is used for the hubs and also patterned to make the fixed ring gear, i.e., c, the sun gear, i.e., a, the rotating ring gear, i.e., c, and the output gear is patterned in the poly2. Since the planetary gear needs to contact both the fixed ring and rotating ring gear, poly2 is added to poly3, where the gear teeth are actually formed. The poly4 layer is used for the arm that drives the sun gear. After the releaseetch, the planetary gears will fall down so that those will engage both the ring gears.The figures for the test structures are presented in Appendix [2]. Since the aim of this paper is to suggest a gear reduction mechanism, the planetary gear system is decomposed to several gear units to verify its performance. The first test structure is about the arm, which rotates the sun gear, connected to the on-chip engine. The angular velocity of the arm depends on the engine output speed. The second test structure describes the point at which the sun gear and planetary gears are engaged to the fixed ring gear. Because of the fact that the ring gear is fixed, the planetary gear is just transmitting the torque from the sun gear to the fixed ring gear without planet motion, e.g., rotating its own axis not around the sun gear. When the rotating ring gear is mounted on top of the fixed ring gear, i.e., the third test structure, the planetary gears begin to rotate around the sun gear so that the planet motion are enabled. Therefore, once one output gear is attached to the rotating ring gear, i.e., the final test structure, the whole reduction unit is completed. Dismantling thePlanetary gear into three test structures allows the pinpointing of possible errors in the gear system.Solutions procedure and expected performanceThe reduction ratio is defined as the ratio between the angular velocity of the driver gear and that of the driven gear. High reduction ratios indicate trading speed for torque. For example, a 10:1 gear reduction unit could increase torque an order of magnitude. Since the gears in the planetary system should be meshed to one another , the design of gear module should follow a restriction. For example, the number of teeth for the sun gear plus either that of the fixed ring gear or that of the rotating ring gear should be the multiple of the number of planets, P (equation 1). Equation 2, which represent the reduction ratio, should observe the equation 1 first. The N is the number of the teeth for corresponding gear. Gears, a, b, c, d in the planetary gear system have a tooth module of 4 m, which is a comparable size of the current gear reduction units[5], and the tooth numbers are 12, 29, 69, and 72 respectively. Therefore the overall reduction ratio is 162:1 from equation (2). Rodgers et al. [7] reported a 12:1 reduction unit using surface micromachining, which is less than order of magnitude for the gear reduction ratio of the planetary gear system. Although the reduction from Rodgers et al. [7] needs to be occupied in approximately 0.093 mm2, the planetary gear system only utilizes an area of approximately 0.076 mm2. Thus,this planetary reduction design can achieve an order of magnitude higher reduction ratio with less space. Since thereduction module is composed of several reduction units, the advantage of using a planetary gear system is self evident in Figure 3.Figure 3 shows the comparison of reduction ratios between the proposed planetary gear mechanism i.e. 162n, and the Sandia gear system [7], i.e. 12n, as a function of the number of units, i.e., n. The ordinate is drawn in log scale so that the orders of magnitude differences between two modules are evident. For example, in a module with five numbers of units, the reduction ratio difference between two is approximately six orders of magnitudes. Furthermore, the planetary gear system can save 8500 m2 in such a five unit reduction system. Conclusion and discussionsThe planetary gear reduction system using surface-micromachining, driven by an on-chip engine, first appears in this paper within the authors’ knowledge. The single reduction unit can achieve an order of magnitude higher reduction ratio than that of the previous design. However, due to the surface friction, and the backlash, which is inevitable for the gear manufacturing process, the overall reduction ratio may be less than 162:1 in the real situation. Even though some loss might be expected in the real application, the overall reduction ratio should be order of magnitude higher and the space consumption is less than the previous design [7].The authors learned a lot about the surfacemicromachining process during the project grant, and realized that a lot of the design needed to be revisited and corrected. This became prevalent when drawing the cross-sectional views of the design. Since the authors utilized the SUMMit V Advanced design Tools Software package and verified the design rules, the planetary gear layout is ready for fabrication. The authors hope that this planetary reduction unit will continue to be updated by successive researchers.AcknowledgementThe authors would acknowledge that discussions with Prof. Kris Pister, Prof. Arun Majumdar, Ms. Karen Cheung, and Mr. Elliot Hui contributed to this work tremendously.References1. Hori, K., and Sato, A., “Micro-planetary reduction gear” Proc. IEEE 2nd Int.Symp. Micro Machine and Human Sciences, pp. 53- 60 (1991).2. Suzumori, K., Miyagawa, T., Kimura, M., and Hasegawa, Y., “Micro Inspection Robot for 1-in Pipes”, IEEE/ASME Trans. On Mechatronics, Vol. 4., No. 3, pp. 286-292 (1999).3. Takeuchi, H., Nakamura, K., Shimizu, N., and Shibaike, N., “Optimization of Mechanical Interface for a Practical Micro-Reducer”, Proc. IEEE 13th Int. Symp. Micro Electro Mechanical Systems, pp. 170-175 (2000).4. Sandia National Laboratories, “Design Rules Design Rules”, Microelectronics Development Laboratory, Version 0.8, (2000)5. Krygowask, T. W., Sniegowask, J. J., Rodgers, M. S., Montague, S., and Allen, J. J., “Infrastructure, Technology and Applications of Micro-Electro-Mechanical Systems (MEMS)”, Sensor Expo 1999 (1999).6. Sniegowski, J. J., Miller, S. L., LaVigne, G. F., Rodgers, M. S., and McWhorter, P. J., “Monolithic G eared-Mechanisms Driven by aPolysilicon Surface-Micromachined On-Chip Electrostatic Microengine”, Solid-State Sensor and Actuator Workshop, pp. 178-182, (1996).7. Rogers, M. S., Sniegowski, S. S., Miller, S., and LaVigne, G. F., “Designing and Operating E lectrostatically Driven Microengines”, Proceedings of the 44th International Instrumentation Symposium, Reno, NV, May 3-7, pp. 56-65 (1998).Figure 1.The schematic of the planetarygear mechanism generated from SUMMiT VDesign layout softwareFigure2. A schematic cross-section of the planetary gear system generated bySUMMiT-V technologyFigure3. The comparison of reduction ratios as a function of the number of units中文翻译采用表面微加工技术制造微型行星齿轮减速器摘要这篇文章论述了一种结构紧凑、传动比高的微型行星齿轮减速机构。
Eddy current retarder developmentTen years ago, in China's passenger car industry to bring "retarder" seems to be a relatively new term, but 10 years later, "retarder" the term has become a passenger car industry have repeatedly mentioned on various occasions The popular term, retarder to be able to bring the advantages of passenger cars has been the perception. China's vast, complex terrain, especially in some parts of the landscape hills, which caused the bus to run in the need to brake downhill, resulting from defective brake caused serious casualties on the rise. In the urban transportation system, as a result of China's urbanization process to speed up urban congestion is an increasingly serious problem. Start-up of vehicles, frequent braking, the number of the brake, causing the bus to speed up the aging vehicle braking system, public transportation vehicles and brake transmission of serious cost.Retarder is entirely targeted solutions to these problems. In the city in vehicles, to extend the retarder braking system 4 to 8 times the life and effectively reduce vehicle maintenance, and operation costs. Passenger in the vehicle, the steep terrain, retarder can effectively alleviate the wheel hub burning heat generated by braking performance led to recession, as well as easy to tire burst early stratification caused by the defects, so that more traffic safety and reduce traffic The accident took place. Electricity, the liquid leading positionCurrently in China retarder on the market, retarder, there are two main types. For an eddy current retarder, for a hydraulic retarder. Eddy current retarder of the main suppliers for the Lok Ma France and Thailand, China, and other good-CSF, hydraulic retarder of the main suppliers in accordance with the special blessing for Germany, ZF and so on."Eddy current retarder installation, maintenance, maintenance costs are lower, more suitable for the Chinese market, especially the public transport market. Eddy current retarder in particular, low-speed range of 30 km / h when the output torque is better, and city buses During the operation an average of 60% in the speed of 30 km below the "Shanghai Lok Ma Thai retarder of the relevant staff for this reporter. "Hydraulic retarder to adapt to the long slope, very steep terrain big advantage, especially in the heat, the long run will not have a high temperature and therefore will not have a braking effect of decay. Hydraulic and relief The quality of the light-speed, eddy current retarder use of copper, aluminum alloy hydraulic retarder material used to generate the hydraulic torque 2000Nm brake retarder, for example, only one-third of the weight of eddy current non - That for passenger cars to reduce fuel consumption is very good. And there is no additional external facilities, no electromagnetic interference. Although the price higher, the durability, reliability. "Blessing in accordance with special technology-driven system (Shanghai) Co., Ltd. to introduce hydraulic engineer such a retarder.Two Retarder about the advantages and disadvantages, the bus industry experts believe that a different operating principle is bound to be different, but for passenger cars, different vehicles for the purpose of the request does not retarder, therefore,choose products To improve the performance of the product is helpful.In the domestic passenger car market retarder on the merits of a gradual recognition and regulations to improve passenger safety, passenger car retarder of the market have also taken place in the rapid expansion of high-end only in the past from the bus before it can function to the current urban public transport buses to install ; From the last 10 meters above the bus to the installation of the current 8 to 10 meters, 6 to 8 meters or even passenger cars have burst into a strong market demand.As a result, in a highly competitive market, the retarder manufacturers are constantly adjusting their product's design, marketing, production strategies, such as hydraulic retarder according to the leading-fu will be part of the special types of products The localization of production, has been developed exclusively for the Chinese market, "Maxima" retarder product, greatly reducing the cost of products, enhanced the competitiveness of their products; Lok Ma Thailand has increased the reliability of their products and product weight , With its more market share.。
附录附录1:英文原文Planetary GearsIntroductionThe Tamiya planetary gearbox is driven by a small DC motor that runs at about 10,500 rpm on 3.0V DC and draws about 1.0A. The maximum speed ratio is 1:400, giving an output speed of about 26 rpm. Four planetary stages are supplied with the gearbox, two 1:4 and two 1:5, and any combination can be selected. Not only is this a good drive for small mechanical applications, it provides an excellent review of epicycle gear trains. The gearbox is a very well-designed plastic kit that can be assembled in about an hour with very few tools. The source for the kit is given in the References.Let's begin by reviewing the fundamentals of gearing, and the trick of analyzing epicyclic gear trains.Epicyclic Gear TrainsA pair of spur gears is represented in the diagram by their pitch circles, which are tangent at the pitch point P. The meshing gear teeth extend beyond the pitch circle by the addendum, and the spaces between them have a depth beneath the pitch circle by the dedendum. If the radii of the pitch circles are a and b, the distance between the gear shafts is a + b. In the action of the gears, the pitch circles roll on one another without slipping. To ensure this, the gear teeth must have a proper shape so that when the driving gear moves uniformly, so does the driven gear. This means that the line of pressure, normal to the tooth profiles in contact, passes through the pitch point. Then, the transmission of power will be free of vibration and high speeds are possible. We won't talk further about gear teeth here, having stated this fundamental principle of gearing.If a gear of pitch radius a has N teeth, then the distance between corresponding points on successive teeth will be 2πa/N, a quantity called the circular pitch. If two gears are to mate, the circular pitches must be the same. The pitch is usually stated as the ration 2a/N, called the diametral pitch. If you count the number of teeth on a gear, then the pitch diameter is the number of teeth times the diametral pitch. If you know the pitch diameters of two gears, then you can specify the distance between the shafts.The velocity ratio r of a pair of gears is the ratio of the angular velocity of the driven gear to the angular velocity of the driving gear. By the condition of rolling of pitch circles, r = -a/b = -N1/N2, since pitch radii are proportional to the number of teeth. The angular velocity n of the gears may be given in radians/sec, revolutions per minute (rpm), or any similar units. If we take one direction of rotation as positive, then the other direction is negative. This is the reason for the (-) sign in the above expression. If one of the gears is internal (having teeth on its inner rim), then the velocity ratio is positive, since the gears will rotate in the same direction.The usual involute gears have a tooth shape that is tolerant of variations in the distance between the axes, so the gears will run smoothly if this distance is not quite correct. The velocity ratio of the gears does not depend on the exact spacing of the axes, but is fixed by the number of teeth, or what is the same thing, by the pitch diameters. Slightly increasing the distance above its theoretical value makes the gears run easier, since the clearances are larger. On the other hand, backlash is also increased, which may not be desired in some applications.An epicyclic gear train has gear shafts mounted on a moving arm or carrier that can rotate about the axis, as well as the gears themselves. The arm can be an input element, or an output element, and can be held fixed or allowed to rotate. The outer gear is the ring gear or annulus. A simple but very common epicyclic train is the sun-and-planet epicyclic train, shown in the figure at the left. Three planetary gears are used for mechanical reasons; they may be considered as one in describing the action of the gearing. The sun gear, the arm, or the ring gear may be input or output links.If the arm is fixed, so that it cannot rotate, we have a simple train of three gears. Then, n2/n1 = -N1/N2, n3/n2 = +N2/N3, and n3/n1 = -N1/N3. This is very simple, and should not be confusing. If the arm is allowed to move, figuring out the velocity ratios taxes the human intellect. Attempting this will show the truth of the statement; if you can manage it, you deserve praise and fame. It is by no means impossible, just invoved. However, there is a very easy way to get the desired result. First, just consider the gear train locked, so it moves as a rigid body, arm and all. All three gears and the arm then have a unity velocity ratio.The trick is that any motion of the gear train can carried out by first holding the arm fixed and rotating the gears relative to one another, and then locking the train and rotating it about the fixed axis. The net motion is the sum or difference of multiples of the two separate motions that satisfies the conditions of the problem (usually that one element is held fixed). To carry out this program, construct a table in which the angular velocities of the gears and arm are listed for each, for each of the two cases. The locked train gives 1, 1, 1, 1 for arm, gear 1, gear 2 and gear 3. Arm fixed gives 0, 1, -N1/N2, -N1/N3. Suppose we want the velocity ration between the arm and gear 1, when gear 3 is fixed. Multiply the first row by a constant so that when it is added to the second row, the velocity of gear 3 will be zero. This constant is N1/N3. Now, doing one displacement and then the other corresponds to adding the two rows. We find N1/N3, 1 + N1/N3, N1/N3 -N1/N2.The first number is the arm velocity, the second the velocity of gear 1, so the velocity ratio between them is N1/(N1 + N3), after multiplying through by N3. This is the velocity ratio we need for the Tamiya gearbox, where the ring gear does not rotate, the sun gear is the input, and the arm is the output. The procedure is general, however, and will work for any epicyclic train.One of the Tamiya planetary gear assemblies has N1 = N2 = 16, N3 = 48, while the other has N1 = 12,N2 = 18, N3 = 48. Because the planetary gears must fit between the sun and ring gears, the condition N3 = N1 + 2N2 must be satisfied. It is indeed satisfied for the numbers of teeth given. The velocity ratio of the first set will be 16/(48 + 16) = 1/4. The velocity ratio of the second set will be 12/(48 + 12) = 1/5. Both ratios are as advertised. Note that the sun gear and arm will rotate in the same direction.The best general method for solving epicyclic gear trains is the tabular method, since it does not contain hidden assumptions like formulas, nor require the work of the vector method. The first step is to isolate the epicyclic train, separating the gear trains for inputs and outputs from it. Find the input speeds or turns, using the input gear trains. There are, in general, two inputs, one of which may be zero in simple problems. Now prepare two rows of the table of turns or angular velocities. The first row corresponds to rotating around the epicyclic axis once, and consists of all 1's. Write down the second row assuming that the arm velocity is zero, using the known gear ratios. The row that you want is a linear combination of these two rows, with unknown multipliers x and y. Summing the entries for the input gears gives two simultaneous linear equations for x and y in terms of the known input velocities. Now the sum of the two rows multiplied by their respective multipliers gives the speeds of all the gears of interest. Finally, find the output speed with the aid of the output gear train. Be careful to get the directions of rotation correct, with respect to a direction taken as positive.The Tamiya Gearbox KitThe parts are best cut from the sprues with a flush-cutter of the type used in electronics. The very small bits of plastic remaining can then be removed with a sharp X-acto knife. Carefully remove all excess plastic, as the instructions say.Read the instructions carefully and make sure that things are the right way up and in the correct relative positons. The gearbox units go together easily with light pressure. Note that the brown ones must go together in the correct relative orientation. The 4mm washers are the ones of which two are supplied, and there is also a full-size drawing of one in the instructions. The smaller washers will not fit over the shaft, anyway. The output shaft is metal. Use larger long-nose pliers to press the E-ring into position in its groove in front of the washer. There is a picture showing how to do this. There was an extra E-ring in my kit. The three prongs fit into the carriers for the planetary gears, and are driven by them.Now stack up the gearbox units as desired. I used all four, being sure to put a 1:5 unit on the end next to the motor. Therefore, I needed the long screws. Press the orange sun gear for the last 1:5 unit firmly on the motor shaft as far as it will go. If it is not well-seated, the motor clip will not close. It might be a good idea to put some lubricant on this gear from the tube included with the kit. If you use a different lubricant, test it first on a piece of plastic from the kit to make sure that it is compatible. A dry graphite lubricant would also work quite well. This should spread lubricant on all parts of the last unit, which is the one subject to the highest speeds. Put the motor in place, gently but firmly, wiggling it so that the sun gear meshes. If the sun gear is not meshed, the motor clip will not close. Now put the motor terminals in a vertical column, and press on the motor clamp.The reverse of the instructions show how to attach the drive arm and gives some hints on use of the gearbox. I got an extra spring pin, and two extra 3 mm washers. If you have some small washers, they can be used on the machine screws holding the gearbox together. Enough torque is produced at the output to damage things (up to 6 kg-cm), so make sure the output arm can rotate freely. I used a standard laboratory DC supply with variable voltage and current limiting, but dry cells could be used as well. The current drain of 1 A is high even for D cells, so a power supply is indicated for serious use. The instructions say not to exceed 4.5V, which is good advice. With 400:1 reduction, the motor should run freely whatever the output load.My gearbox ran well the first time it was tested. I timed the output revolutions with a stopwatch, and found 47s for 20 revolutions, or 25.5 rpm. This corresponds to 10,200 rpm at the motor, which is close tospecifications. It would be easy to connect another gearbox in series with this one (parts are included to make this possible), and get about 4 revolutions per hour. Still another gearbox would produce about one revolution in four days. This is an excellent kit, and I recommend it highly.Other Epicyclic TrainsA very famous epicyclic chain is the Watt sun-and-planet gear, patented in 1781 as an alternative to the crank for converting the reciprocating motion of a steam engine into rotary motion. It was invented by William Murdoch. The crank, at that time, had been patented and Watt did not want to pay royalties. An incidental advantage was a 1:2 increase in the rotative speed of the output. However, it was more expensive than a crank, and was seldom used after the crank patent expired. Watch the animation on Wikipedia.The input is the arm, which carries the planet gear wheel mating with the sun gear wheel of equal size. The planet wheel is prevented from rotating by being fastened to the connecting rod. It oscillates a little, but always returns to the same place on every revolution. Using the tabular method explained above, the first line is 1, 1, 1 where the first number refers to the arm, the second to the planet gear, and the third to the sun gear. The second line is 0, -1, 1, where we have rotated the planet one turn anticlockwise. Adding, we get 1, 0, 2, which means that one revolution of the arm (one double stroke of the engine) gives two revolutions of the sun gear.We can use the sun-and-planet gear to illustrate another method for analyzing epicyclical trains in which we use velocities. This method may be more satisfying than the tabular method and show more clearly how the train works. In the diagram at the right, A and O are the centres of the planet and sun gears, respectively. A rotates about O with angular velocity ω1, which we assume clockwise. At the position shown, this gives A a velocity 2ω1 upward, as shown. Now the planet gear does not rotate, so all points in it move with the same velocity as A. This includes the pitch point P, which is also a point in the sun gear, which rotates about the fixed axis O with angular velocity ω2. Therefore, ω2= 2ω1, the same result as with the tabular method.The diagram at the left shows how the velocity method is applied to the planetary gear set treated above. The sun and planet gears are assumed to be the same diameter (2 units). The ring gear is then of diameter 6. Let us assume the sun gear is fixed, so that the pitch point P is also fixed. The velocity of point A is twice the angular velocity of the arm. Since P is fixed, P' must move at twice the velocity of A, or four times the velocity of the arm. However, the velocity of P' is three times the angular velocity of the ring gearas well, so that 3ωr= 4ωa. If the arm is the input, the velocity ratio is then 3:4, while if the ring is the input, the velocity ratio is 4:3.A three-speed bicycle hub may contain two of these epicyclical trains, with the ring gears connected (actually, common to the two trains). The input from the rear sprocket is to the arm of one train, while the output to the hub is from the arm of the second train. It is possible to lock one or both of the sun gears to the axle, or else to lock the sun gear to the arm and free of the axle, so that the train gives a 1:1 ratio. The three gears are: high, 3:4, output train locked; middle, 1:1, both trains locked, and low, 4:3 input train locked. Of course, this is just one possibility, and many different variable hubs have been manufactured. The planetary variable hub was introduced by Sturmey-Archer in 1903. The popular AW hub had the ratios mentioned here.Chain hoists may use epicyclical trains. The ring gear is stationary, part of the main housing. The input is to the sun gear, the output from the planet carrier. The sun and planet gears have very different diameters, to obtain a large reduction ratio.The Model T Ford (1908-1927) used a reverted epicyclic transmission in which brake bands applied to the shafts carrying sun gears selected the gear ratio. The low gear ratio was 11:4 forward, while the reverse gear ratio was -4:1. The high gear was 1:1. Reverted means that the gears on the planet carrier shaft drove other gears on shafts concentric with the main shaft, where the brake bands were applied. The floor controls were three pedals: low-neutral-high, reverse, transmission brake. The hand brake applied stopped theleft-hand pedal at neutral. The spark advance and throttle were on the steering column.The automotive differential, illustrated at the right, is a bevel-gear epicyclic train. The pinion drives the ring gear (crown wheel) which rotates freely, carrying the idler gears. Only one idler is necessary, but more than one gives better symmetry. The ring gear corresponds to the planet carrier, and the idler gears to the planet gears, of the usual epicyclic chain. The idler gears drive the side gears on the half-axles, which correspond to the sun and ring gears, and are the output gears. When the two half-axles revolve at the same speed, the idlers do not revolve. When the half-axles move at different speeds, the idlers revolve. The differential applies equal torque to the side gears (they are driven at equal distances by the idlers) while allowing them to rotate at different speeds. If one wheel slips, it rotates at double speed while the other wheel does not rotate. The same (small) torque is, nevertheless, applied to both wheels.The tabular method is easily used to analyze the angular velocities. Rotating the chain as a whole gives 1, 0, 1, 1 for ring, idler, left and right side gears. Holding the ring fixed gives 0, 1, 1, -1. If the right side gear isheld fixed and the ring makes one rotation, we simply add to get 1, 1, 2, 0, which says that the left side gear makes two revolutions. The velocity method can also be used, of course. Considering the (equal) forces exerted on the side gears by the idler gears shows that the torques will be equal.ReferencesTamiya Planetary Gearbox Set, Item 72001-1400. Edmund Scientific, Catalog No. C029D, itemD30524-08 ($19.95).C. Carmichael, ed., Kent's Mechanical Engineer's Handbook, 12th ed. (New York: John Wiley and Sons, 1950). Design and Production Volume, p.14-49 to 14-43.V. L. Doughtie, Elements of Mechanism, 6th ed. (New York: John Wiley and Sons, 1947). pp. 299-311.Epicyclic gear. Wikipedia article on epicyclic trains.Sun and planet gear. Includes an animation.英文译文介绍Tamiya行星轮变速箱由一个约 10500 r/min,3.0V,1.0A的直流电机运行。
Mitigation of loss within a molecular Stark deceleratorEric R. Hudson Department of Physics, Yale University, New Haven, CT 06520, USA (Dated: February3,2008)The transverse motion inside a Stark decelerator plays a large role in the total e fficiency of deceleration. We di fferentiate between two separate regimes of molecule loss during the slowing process. The first mechanismin volves distributedloss due to coupling of transverseand longitudinal motion,while the second is a resul to futher apiddecrease of themolecularvelocity within the final fewstages. Inthiswork,wedescribethesee ffectsandpresentmeansforovercomingthem. Solutions based on modi fied switching time sequences with the existing decelerator geometry lead to a large gainofstablemoleculesintheintermediatevelocityregime,butfailtoaddressthelossatverylow final velocities. We propose a new decelerator design, the quadrupole-guiding decelerator, which eliminatesdistributedlossduetotransverse/longitudinalcouplingsthroughouttheslowingprocess andalsoexhibitsgainovernormaldecelerationtothelowestvelocities.PACSnumbers: 33.55.Be,39.10.+j,39.90.+dI. INTRODUCTIONstatepolarmolecules(∼109cm −3),albeitathighpacket velocities. One limitation of this technique for trapping of decelerated molecules is an observed drastic loss of slowedmoleculesatverylowmeanvelocitiesinbothour owngroup’sworkandtheBerlingroupofG.Meijer[13]. WeaddressthisprobleminthisArticle. Recent development of cold polar-molecule sources promises to reveal many interesting, and hitherto unex- plored,molecularinteractiondynamics. Thepermanent electricdipolemomentpossessedbypolarmoleculespro- videsanewtypeofinteractionintheultracoldenviron- ment. Thiselectricdipole-dipoleinteraction(andcontrol overit)shouldgiverisetouniquephysicsandchemistry including novel cold-collision dynamics [1, 2] and quan- tuminformationprocessing[3]. As the leading method for producing cold samples of chemicallyinterestingpolarmolecules,Starkdeceleration hasgeneratedcoldsamplesofCO[9],ND [14],OH[15– 3 18], YbF [19], H CO [2], NH [20], and SO [21], lead- 2 2 ing to the trapping of both ND [14] and OH [18, 22]. 3 GiventheimportanceofStarkdecelerationtothestudy of cold molecules, it is crucial that the technique be re- finedtoachievemaximumdeceleratione fficiency. Inthis work,weprovideadetaileddescriptionofprocessesthat limit the e fficiency of current decelerators and propose methodsforovercomingthem. Weproposepossiblesolu- tionstotheparametrictransverse/longitudinalcoupling loss originally highlighted in Ref. [23], as well as elu- cidate a new loss mechanism unique to producing the slowestmolecules. Werestrictthedescribedsimulations and theory to Stark decelerated, ground-state OH radi- cals,asthesupportingexperimentaldatawastakenwith this molecular species. However, the loss mechanisms described herein are not speci fic to OH, and represent a general limitation of current Stark decelerators. This reduces the e fficiency of Stark decelerators for trapping coldpolarmolecules. To date, cold polar-molecule samples have been produced most successfully via three different mecha- nisms: bu ffer gas cooling [4, 10]; photo- and magneto- association [5–8]; and Stark deceleration [9]. Bu ffer gas cooling achieves temperatures below 1 K through ther- malizationofmoleculeswithaHebu ffer. Thistechnique produces relatively large densities (108 cm −3) of polar ground-state molecules. However, cooling below ∼ 100 mK has not yet been achieved because the He bu ffer gas has not been removed quickly enough for evapora- tive cooling [10]. Photoassociation achieves the lowest molecular temperatures of these techniques (∼100 µK), but is limited to molecules whose atomic constituents are amenable to laser-cooling. Furthermore, molecules in their ground vibrational state are not readily pro- duced,yieldingspecieswithrelativelysmalle ffectiveelec- tricdipoles,althoughthisproblemcanbeovercomewith moresophisticatedlasercontroltechniques[6,11]. Stark deceleration exists as an alternative to these methods as the technique employs well-characterized supersonic beam methods [12] to produce large densities of ground This Article is organized as follows. Section II de- scribes the mechanisms responsible for molecular loss at low velocities. Sections III, IV, and V present methods of producing molecular packets at intermedi- atevelocities(>100m/s)withoutthedistributedtrans- verse/longitudinalcouplinglossesofRef.[23]. However, these methods exacerbate the problem of low-velocity loss. Therefore, we propose a new decelerator design in ∗*********************2SectionVIthatexhibitsgainoverconventionalStarkde- celerationtovelocitiesaslowas14m/s.II. LOSS AT LOW VELOCITIESInmuchofthepreviousworkonStarkdeceleration,it isassumedthatallmotionparallelandtransversetothe decelerator axis is stable up to some maximum excur- sionvelocityandpositionfromthebeamcenter[17,24], enabling the derivation of an analytical solution to pre- dict stable-molecule phase-space area. However, there are several important instances where the assumptions of this model become invalid. In the case of very slow molecules (<50 m/s) [31], we observe two distinct phe- nomena leading to reduced decelerator e fficiency at the finaldecelerationstages: transverseoverfocusingandlon- gitudinalre flection. Transverseoverfocusingoccurswhen thedeceleratedmolecules’speedbecomessolowthatthe decelerating electrodes focus the molecules too tightly (transversely)andtheyeithermakecontactwiththeelec- trodes or are strongly dispersed upon exiting the decel- erator. Longerdeceleratorstendtoexacerbatethise ffect duetothefactthatmoleculescantravelatlowspeedsfor many stages. Nonetheless, there are several motivating factorsforconstructingalongerdecelerator. First,longer decelerators allow less energy per stage to be removed andconsequentlyleadtolargerlongitudinalphase-space acceptance. Second, a longer decelerator may allow de- celeration of molecules possessing an unfavorable Stark shifttomassratio. Wewilldiscusscriticalissuesforuse ofsuchlongdeceleratorsforslowmoleculeproduction. A second low-velocity e ffect, which we have denoted “longitudinalre flection,”isadirectresultofthespatial inhomogeneity of the electric field at the final decelera- tion stage. As highlighted in the context of transverse guidanceinRef.[23],thelongitudinalpotentialislargest forthosemoleculespassing –inthetransversedimension – nearest to the decelerator rods. However, the decelera- tor switching sequence is generally only synchronous to a molecule on-axis traveling at the mean speed of the packet. Asaresult, whenthemeanlongitudinalkinetic energy of the slowed packet becomes comparable to the Stark potential barrier at the last stage, molecules o ff- axis can be stopped or re flected, resulting in a spatial filtering e ffect. Furthermore, the longitudinal velocity spreadofthemolecularpacketatthe finalstage,iflarger thanthe finalmeanvelocity,canleadtore flectionofthe slowest portion of the packet. It is important that the phenomenaofoverfocusingandlongitudinalre flectionbe addressedsincemoleculetrapsfedbyStarkdecelerators requireslowpacketsfore fficientloading. FIG. 1: (color online) (a) Simulations of the phase-stable molecule number as a function of stage number in our 142- stage decelerator. Note the dramatic decrease in number in the last several stages for φo =30.43◦. This decrease is due totransverseoverfocusingandlongitudinalre flectionofthese slow (14 m/s) molecules. (b) Simulated transverse (trace 1) andlongitudinal(trace2)fractionallossratesasafunctionof timewithinthe finalthreestagesat φo =30.43◦. Thevertical dashedlinesdenotethetimesofthegivenstageswitches. versus increasing phase angle. In Fig. 3, the dark lines repre- senttheseparatrix,partitioningstabledecelerationphase spacefromthatofunstablemotionascalculatedfromEq. 2inRef.[17]. Eachdotrepresentsthepositioninphase space of a simulated molecule. In the absence of cou- pling between the longitudinal and transverse motions, onewouldexpecttheentireareainsidetheseparatrixto be occupied. Therefore, thestructureinthesegraphsis evidenceoftheimportanceofthetransversemotion. In the left column of Fig. 3, the coupling of longi- tudinal and transverse motions is responsible for two e ffects [33]: First, in the center of the stable area at = 0◦–near the synchronous molecule –the density of φ 0 stable molecules is less than in the surrounding area. This is because molecules that oscillate very near the synchronous molecule experience little transverse guid- ing. Thise ffectisnotdramaticandisonlydiscernablefor anexceedinglylargenumberofstages. Furthermore,this e ffectisevenlessimportantfortheincreasedphaseangles typically used for deceleration, since for these switching sequencesthesynchronousmoleculeexperiencesmoreof thetransverseguidingforcesthanitdoesduringbunch- ing. The second e ffect, which is much more evident, is the absence of molecules at intermediate distances from the synchronous molecule as shown in the left column of Fig 3. This so-called ‘halo’ is due to parametric am - pli ficationofthetransversemotionandissimilartothe e ffectsseenincoldmoleculestoragerings[24]aswellas chargedparticleaccelerators[26]. Essentially,thelongi- tudinaloscillationfrequencyofamoleculeinthisregion is matched to the transverse oscillation frequency, lead- ing to ampli fication of the transverse and longitudinal motionandconsequentloss. leads to loss of 20% of the decelerated molecule num- ber between φ = 30◦ (50 m/s) and φ = 30.43◦ (14 o o m/s). Such a dramatic loss is not predicted by analyt- ical theory, as the stable phase-space area decreases by only <1% over this range of φ . This number is calcu- 0 lateddirectlyafterthedeceleratorisswitched-o ffandis thusanupperbound,sinceexperimentsemployingthese coldmoleculesrequirethemtotraveloutofthedeceler- atorwheretransversespreadcanleadtodramaticlossof moleculenumber. Experimental evidence of this sudden decrease in moleculenumberatverylowvelocitiesisgiveninFig.2, which displays time-of-flight (ToF) spectra along with corresponding Monte Carlo simulation results at vari- ous phase angles. The decelerated OH molecules are in the weak-field seeking |F = 2,m = ±2,−i state. F The first two quantum numbers of the state denote its hyper finecomponents, whilethethirdnumberindicates the parity of the state in the absence of electric fields. Figures 2(b) and (c) illustrate progressive time delays oftheslowedmolecularpacketsfromthebackgroundof non-synchronous molecules. Figures 2(d) and (e) dis- play only the decelerated packets, and the vertical axes oftheseplotsaremagni fiedbyafactorof100. Thedual peaks correspond to molecular packets loaded into two successive stages, and the later peaks represent the in- tended finalvelocities. Thetotaldetectedandsimulated molecule numbers are plotted in Fig. 2(f) as a function of final velocity, along with the theoretically expected decelerator e fficiency (dashed line) [17]. Note that the sudden population decrease in both simulation and ex- perimentalresultsisnotre flectedintheone-dimensional theoreticalmodel,whichdoesnotaccountforthetrans- verse dynamics or field inhomogeneities that cause such behavior. Thise ffectisdetrimentaltotheproductionof densesamplesofcoldmolecules. Toremovetheoverfocusinge ffectatlowvelocities,the transversefocusing ofthelastseveraldeceleratorstages needstobereduced. Di fferenttypesoftransversefocus- ingelementsmaybeinsertedintothedecelerationbeam linetocompensateforthisphenomenon. Thisideaisdis- Thereisacompromisebetweendecreasinglongitudinal phase-space area and increasing transverse guidance for increasing φ . To demonstrate this e ffect, we decelerate 0 moleculestoa fixedv andvarythephaseangleused final to reach this velocity. This is done either by changing。