武汉大学机械工程图学第二版第二章习题参考答案
- 格式:ppt
- 大小:411.50 KB
- 文档页数:12
第二章作业2-1常见的金属晶体结构有哪几种? 它们的原子排列和晶格常数有什么特点? -Fe、-Fe、Al、 Cu、 Ni、 Cr、 V、 Mg、 Zn各属何种结构?答: 常见晶体结构有3种:⑴体心立方: -Fe、 Cr、 V⑵面心立方: -Fe、 Al、 Cu、 Ni⑶密排六方: Mg、 Zn2---7为何单晶体具有各向异性, 而多晶体在一般情况下不显示出各向异性?答: 因为单晶体内各个方向上原子排列密度不同, 造成原子间结合力不同, 因而表现出各向异性;而多晶体是由很多个单晶体所组成, 它在各个方向上的力相互抵消平衡, 因而表现各向同性。
第三章作业3-2 如果其它条件相同, 试比较在下列铸造条件下, 所得铸件晶粒的大小; ⑴金属模浇注与砂模浇注; ⑵高温浇注与低温浇注; ⑶铸成薄壁件与铸成厚壁件; ⑷浇注时采用振动与不采用振动; ⑸厚大铸件的表面部分与中心部分。
答: 晶粒大小: ⑴金属模浇注的晶粒小⑵低温浇注的晶粒小⑶铸成薄壁件的晶粒小⑷采用振动的晶粒小⑸厚大铸件表面部分的晶粒小第四章作业4-4 在常温下为什么细晶粒金属强度高, 且塑性、韧性也好? 试用多晶体塑性变形的特点予以解释。
答: 晶粒细小而均匀, 不但常温下强度较高, 而且塑性和韧性也较好, 即强韧性好。
原因是:( 1) 强度高: Hall-Petch公式。
晶界越多, 越难滑移。
( 2) 塑性好: 晶粒越多, 变形均匀而分散, 减少应力集中。
( 3) 韧性好: 晶粒越细, 晶界越曲折, 裂纹越不易传播。
4-6 生产中加工长的精密细杠( 或轴) 时, 常在半精加工后, 将将丝杠吊挂起来并用木锤沿全长轻击几遍在吊挂7~15天, 然后再精加工。
试解释这样做的目的及其原因?答: 这叫时效处理一般是在工件热处理之后进行原因用木锤轻击是为了尽快消除工件内部应力减少成品形变应力吊起来, 是细长工件的一种存放形式吊个7天, 让工件释放应力的时间, 轴越粗放的时间越长。
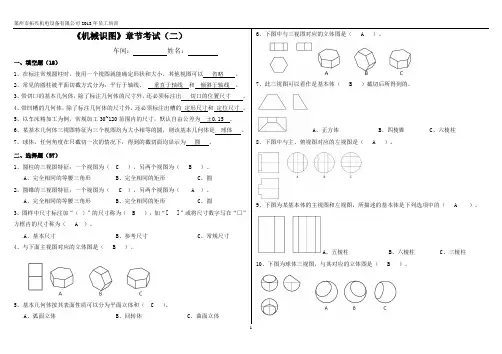
《机械识图》章节考试(二)车间:姓名:一、填空题(18)1、在标注常规圆柱时,使用一个视图就能确定形状和大小,其他视图可以省略。
2、常见的圆柱被平面切截方式分为:平行于轴线、垂直于轴线和倾斜于轴线。
3、带切口的基本几何体,除了标注几何体的尺寸外,还必须标注出切口的位置尺寸。
4、带凹糟的几何体,除了标注几何体的尺寸外,还必须标注出槽的定形尺寸和定位尺寸。
5、以车床精加工为例,常规加工30~120范围内的尺寸,默认自由公差为±0.15 。
6、某基本几何体三视图特征为三个视图均为大小相等的圆,则该基本几何体是球体。
7、球体,任何角度在只截切一次的情况下,得到的截切面均显示为圆。
二、选择题(57)1、圆柱的三视图特征:一个视图为( C ),另两个视图为( B )。
A、完全相同的等腰三角形B、完全相同的矩形C、圆2、圆锥的三视图特征:一个视图为( C ),另两个视图为( A )。
A、完全相同的等腰三角形B、完全相同的矩形C、圆3、图样中尺寸标注加“()”的尺寸称为( B ),加“[ ]”或将尺寸数字写在“□”方框内的尺寸称为( A )。
A、基本尺寸B、参考尺寸C、常规尺寸4、与下面主视图对应的立体图是( B )。
5、基本几何体按其表面性质可以分为平面立体和( C )。
A、弧面立体B、回转体C、曲面立体6、下图中与三视图对应的立体图是( A )。
7、此三视图可以看作是基本体( B )截切后所得到的。
A、正方体B、四棱锥C、六棱柱8、下图中与主、俯视图对应的左视图是( A )。
9、下图为某基本体的主视图和左视图,所描述的基本体是下列选项中的( A )。
A、五棱柱B、六棱柱C、三棱柱10、下图为球体三视图,与其对应的立体图是( B )。
11、下列图形中,尺寸标注不能完全确定工件形状和大小的是( B )。
12、与立体图对应的主视图是( A )。
13、与三视图对应的立体图是( A )。
14、与立体图对应的标准三视图是( C )。
第一章绪论思考下列问题:1.机械制造工业的发展历史和现状。
2.机械制造工业在国民经济中的地位作用。
3.本课程的主要任务和要求。
第二章金属切削加工的基础知识一、填空题1. 在加工中,刀具和工件之间的相对运动称为切削运动,按其功用可分为主运动和进给运动。
其中主运动消耗功率最大。
2. 切削用量三要素是指切削速度、进给量和背吃刀量。
*3. 刀具静止角度参考系的假定条件是假定安装条件和假定运动条件。
4. 常用的切削刃剖切平面有正交平面、法平面、背平面和假定工作平面,它们可分别与基面和切削平面组成相应的参考系。
5. 在正交平面内度量的前刀面与基面之间的夹角称为前角,后刀面与切削平面之间的夹角称为后角。
6. 正交平面与法平面重合的条件是刃倾角为0 。
7. 基准平面确定后,前刀面由前角和刃倾角两个角确定;后刀面由后角和主偏角两个角确定;前、后刀面确定了一条切削刃,所以一条切削刃由前角、后角、刃倾角、主偏角四个角度确定。
8. 用以确定刀具几何角度的两类参考坐标系为刀具标注角度参考系和刀具工作角度参考系。
二、判断题(正确的打√,错误的打×)1. 在切削加工中,进给运动只能有一个。
(×)2. 背平面是指通过切削刃上选定点,平行于假定进给运动方向,并垂直于基面的平面。
(×)3. 其它参数不变,主偏角减少,切削层厚度增加。
(×)4. 其它参数不变,背吃刀量增加,切削层宽度增加。
(√)5. 主切削刃与进给运动方向间的夹角为主偏角K。
(×)r*6. 车削外圆时,若刀尖高于工件中心,则实际前角增大。
(√)7. 对于切断刀的切削工作而言,若考虑进给运动的影响,其工作前角减少,工作后角增大。
(×)*8. 当主偏角为90时,正交平面与假定工作平面重合。
(√)9. 切削铸铁类等脆性材料时,应选择K类(YG类)硬质合金。
(√)10. 粗加工时,应选择含钴量较低的硬质合金。
(×)三、名词解释1. 基面过切削刃上选定点垂直于主运动方向的平面。
机械制造工艺考试救星该文档由1200110224提供,仅供参考(以下为要考的题目)l-11 在图l—30中,注有加工符号的表面为待加工表面,试分别确定应限制的自由度。
l—12 根据六点定位原理,试用总体分析法和分件分析分析法,分别分析图1–31中6种定位方案所限制的自由度,并分析是否有欠定位和过定位,其过定位是否允许?2—4 在车床上用两顶尖装夹工件车削细长轴时,出现图2—80a、b、c所示误差是什么原因,分别可采用什么办法来减少或消除?答:a)主要原因是工件在切削力作用下弯曲变形,产生鼓形圆柱度误差。
主要采用提高工件刚度的方法减小这类误差,例如采用中心架或者跟刀架,减小切削力的作用点到支承之间的距离,以增大工件在切削时的刚度.b)主要原因是机床在切削力作用下变形,产生马鞍形的圆柱度误差.主要采用提高机床部件刚度的方法减小这类误差,例如加工中采用支撑套,增大机床的刚度.c)主要原因是机床导轨与主轴回转轴线不平行造成的误差。
主要采用减小导轨对主轴回转轴线的平行度误差来减小这类误差,或者采用校正装置补偿该误差产生的影响。
2-5 试分析在转塔车床上将车刀垂直安装加工外圆时,影响直径误差的因素中,导轨在垂直面内和水平面内的弯曲,哪个影响大?与卧式车床比较有什么不同?为什么?答:D:工件直径;ΔDy,ΔDz工件直径误差;Δy:导轨在水平面内的弯曲;Δz:导轨在垂直面内的弯曲;车刀垂直安装时误差的敏感方向在垂直方向。
因此导轨在垂直面内的弯曲对工件直径误差的影响较大车刀垂直安装:z方向为误差敏感方向在卧式车床中:y方向为误差敏感方向2-8 设已知一工艺系统的误差复映系数为0。
25,工件在本工序前有圆度误差0。
45mm,若本工序形状精度规定允差0。
01mm,问至少进给几次方能使形状精度合格?解:已知,为保证工序形状精度规定允差0。
01mm,则:由于每进给一次,误差复映系数为:时,因此至少进给3次方能使形状精度合格.3-10横磨工件时(图3-83),设横向磨削力Fy=100N,主轴箱刚度K tj=5000N/mm,尾座刚度K wz=4000N /mm,加工工件尺寸如图示,求加工后工件的锥度。
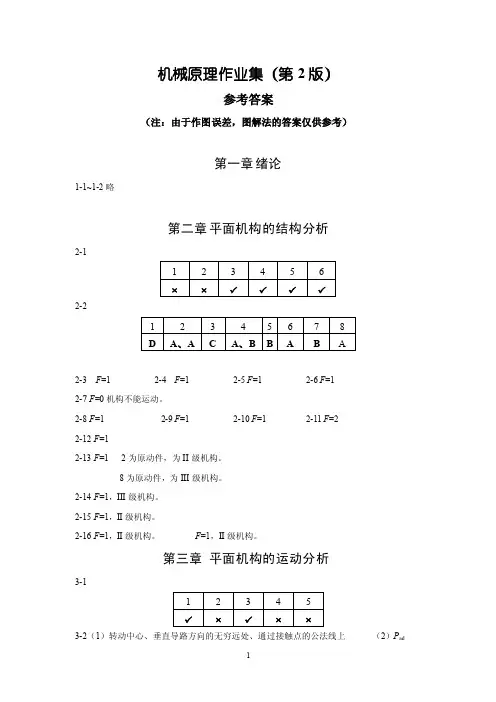
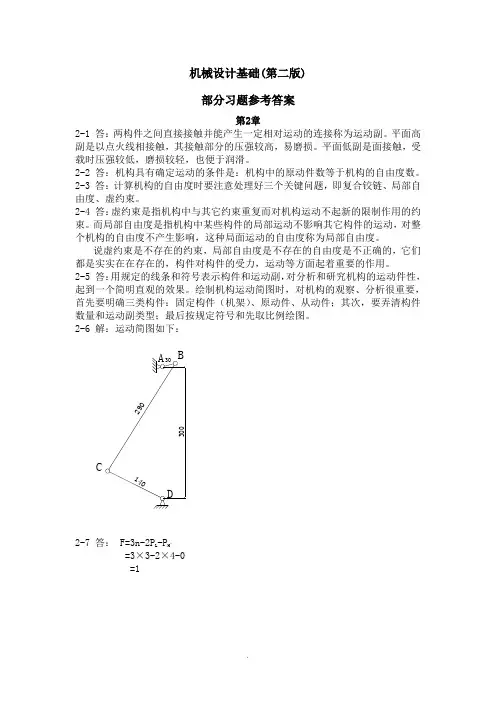
机械原理作业集(第2版)参考答案(注:由于作图误差,图解法的答案仅供参考)第一章绪论1-1~1-2略第二章平面机构的结构分析2-12-22-3 F=1 2-4 F=1 2-5 F=1 2-6 F=12-7 F=0机构不能运动。
2-8 F=1 2-9 F=1 2-10 F=1 2-11 F=22-12 F=12-13 F=1 2为原动件,为II级机构。
8为原动件,为III级机构。
2-14 F=1,III级机构。
2-15 F=1,II级机构。
2-16 F=1,II级机构。
F=1,II级机构。
第三章平面机构的运动分析3-13-2(1)转动中心、垂直导路方向的无穷远处、通过接触点的公法线上(2)P ad(3)铰链,矢量方程可解;作组成组成移动副的两活动构件上重合点的运动分析时,如果铰链点不在导路上(4) 、 (5)相等(6) 同一构件上任意三点构成的图形与速度图(或加速度图)中代表该三点绝对速度(或加速度)的矢量端点构成的图形, 一致 ;已知某构件上两点的速度,可方便求出第三点的速度。
(7)由于牵连构件的运动为转动,使得相对速度的方向不断变化。
3-31613361331P P P P=ωω 3-4 略3-5(1)080m /s C v .=(2)0.72m /s E v = (3) =26°、227° 3-6~3-9 略3-10(a )、(b )存在, (c )、(d )不存在。
3-11~3-16 略 3-17第四章 平面机构的力分析、摩擦及机械的效率4-14-24-3 )sin )((211212l l ll l l f f V +++=θ4-4 F =1430N 4-5~4-9略232/95.110s m v -==ωB v JI v4-10)2()2(ρρη+-=b a a b4-115667.0 31.110==≤ηϕα4-12 59.0=η 4-13 59.0=η4-14 2185.0=η N Q 3.10297= 4-15 7848.0113.637==ηN F4-16 KW P 026.88224.0==η 4-17KW P 53.96296.0==η4-18 ϕα2≤ 4-19 F =140N 4-20 ϕαϕ-<<O 90第五章 平面连杆机构及其设计5-15-2(1) 摇杆(尺寸),曲柄(曲柄与连杆组成的转动副尺寸),机架(连杆作为机架) (2) 有,AB ,曲柄摇杆机构 ;AB ;CD 为机架(3) 曲柄 与 机架 (4) 曲柄摇杆机构、偏置曲柄滑块机构、摆动导杆机构 (5) 曲柄摇杆机构、摆动导杆机构;曲柄滑块机构 (6) 等速,为主动件 (7) 7 (8) 往复 ,且 连杆与从动件 (9) 选取新机架、刚化搬移、作垂直平分线;包含待求铰链 且 位置已知 (10) 9 ; 5 5-3 70 < l AD <670 5-4~5-18 略5-19 l AC =150mm l CD =3000mm h =279.9 mm5-20 a =63.923mm b =101.197mm c =101.094mm d =80mm第六章 凸轮机构及其设计6-16-26-3(1)等加速等减速、余弦加速度、等速、正弦加速度、五次多项式 (2)刚性、柔性(3)理论廓线(4)互为法向等距曲线(5)增大基圆半径、采用正偏置(6)增大基圆半径、减小滚子半径(7)提高凸轮机构运动的轻巧性和效率、避免加速度过大造成冲击 6-4略 6-56-6 ~ 6-13略 6-146-15 6-16略第七章 齿轮机构及其设计7-1︒==6858.70822rad πδ︒='=︒≡====1803064.3432.1700min max 0δδαααmmh mm r 6332.343776.51240-='='-=δy x6395.185947.4060='-='=δy x7-27-3(1) (2)7-4 z = 41.45 7-5略7-6 (1) (2) 7-7 7-8略 7-9 7-10 7-11略7-12 (1) (2)(3) 7-13(1) (2) (3) 7-14略7-15 7-16略7-17 共有7种方案 7-18~7-19 略302021==z z 6.931517.5617115.377a b a s mm s mm r mm===634.1=εαmmj mmc mm a t 77.269.494.15523.23='='='=α' s mm v mm L /490==刀294-==x z 8.04.88==x z 9899.482234117229.1142444153.44='''=='==K K Kρθα mmr K K 3433.702444='= α8879.22α='mmr mm r 2.618.4021='='mmd z mmm 120304===5.0-=x mm s 827.4=1.04711x =-7-207-21 7-22 略7-23正传动, 7-24~7-25 略 7-26(1)正传动(2) 7-27 略 7-287-29 略第八章 齿轮系及其设计8—18—28—3(1)从动轮齿数的连乘积除以主动轮齿数的连乘积、数外啮合次数或用画箭头的 (2)用画箭头的(3)有无使行星轮产生复合运动的转臂(系杆) (4)相对运动原理(5)一个或几个中心轮、一个转臂(系杆)、一个或几个行星轮(6)转化轮系中A 轮到B 轮的传动比、周转轮系中A 轮到B 轮的传动比、AB i 可以通过H ABi 求解(7)找出周转轮系中的行星轮、转臂及其中心轮 (8)传动比条件、同心条件、均布装配条件、邻接条件(9)传动比很大结构紧凑效率较低、要求传动比大的传递运动的场合、传动比较小效率较0399.02='x mm a 5892.90='mm r a 93.581=13.7291β=116.36v z = 2.6934γε=2222(1)175(2)185163(3) 5.7106(4)112.5a f d mm d mm d mma mmβ=====高、传递动力和要求效率较高的场合 (10)差动轮系 8-4 8-58-6 8-7 8-8 8-98-10 8-11 8-12(a ) (b ) 8-13(1) (2) 8-14 z 2≈68 8-15 8-168-17 (1) (2) 8-188-19 8-20 min /28.154r n B -=8-21只行星轮满足邻接条件件,只行星轮不满足邻接条34144803mml z H ==8-22 162/108/5463/42/2136/24/12321===z z z第九章 其他常用机构9-1 9-2 9-3 9-4mms 075.0=232==n k mm l B 3=8.658=ϕmin/84r n =mm R 975.23=32143211''-=z z z z z z i H min/3r n H =NF 64.308=5.141-=i 072.016-=i min /600r n H -=min/385.15r n H =31=H i 8.11=H i 0=H n min /667.653197min /2min /340042r n r n r n A ≈===min /47.26r n c =min /1350r n c -=min /6349.063407r n ≈=4286.0731-≈-=Hi .1533.433=i第十章 机械的运转及其速度波动的调节10-110-210-3 2 05.050kgm J Nm M e er =-=10-4222212334111()()e e z z J J J J m m e M M Qe z z =++++=- 10-520.14.20J kg m M Nm ==-10-6 2334.()cos cos ABr G l h J M F G gφφ==- 10-7332.18221857e e J kgm MNm ==10-811100/50/rad s rad s αω== 10-9maxmax minmin 30.048140.962/2 39.038/0,2rad s rad sδωφπωφπ=====10-102280.4730.388F FJ kgm J kgm '== 10-1102max max 623.1/min104.1654 2.11329F n r J kgm φ===10-12max max minmin 0.06381031.916/min 968.08/mine bn r nr δφφφφ=====10-1326max min 302F e b f Nm J kgm ωφωφ==→→第十一章 机械的平衡11-111-211-3 2.109252.66ob b r cm θ==11-412.31068.5227bA bB m kg m kg==11-511-611-711-8)(2)(2 , )b )( )( , )a ⅡⅡ ⅠⅠ ⅡⅡ ⅠⅠ 上下动不平衡静平衡上下动不平衡静平衡mrr m mr r m mr r m mr r m b b b b b b b b ====oⅡb Ⅱob Ⅰgm W W W 90 84.08419 gm 0628.1Ⅱb 3Ⅰb ==='==θθ0B 0A 120 285.0 8584.260 285.0 8584.2======bA bB bA bAkg m kgmm W kg m kgmm W θθb b 819.15 2.048 267.3512.98 1.283 118.44b b b b W kgmm m kg W kgmm m kg I I I II II II ==θ===θ=---------------------------------------------------------------范文最新推荐------------------------------------------------------ 工作总结-财务处长个人工作总结[工作总结-财务处长个人工作总结]工作总结-财务处长个人工作总结(范文)工作总结-财务处长个人工作总结2009-07-06 11:52财务处长个人工作总结光阴似箭、岁月如梭,转眼之间一年过去了,新的一年已经开始,工作总结-财务处长个人工作总结。
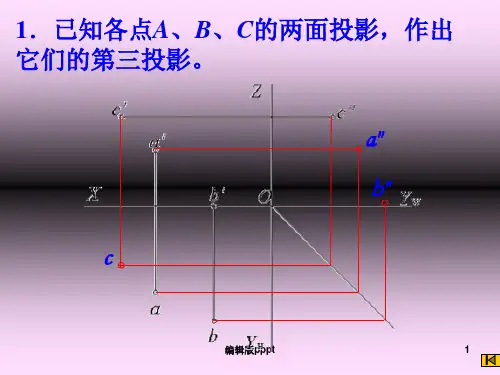
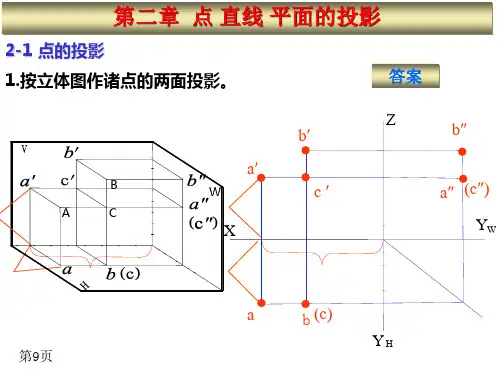
工程制图第二章习题答案(总33页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第二章点、直线、平面的投影————点的投影班级学号姓名2-1、求各点的第三投影,并填上各点到投影面的距离。
2-2、已知点K(10,15,20)、M(20,15,8)、N(10,15,8)三点的坐标,作出三面投影和在直观图中的位置,并判别可见性。
不可见点用括号括起。
2A点距V面( 5 )、距H面(6)、距W面( 8 )B点距V面( 4 )、距H面( 3 )、距W面( 2 )C点距V面( 2 )、距H面( 2 )、距W面( 2)D点距V面( 0)、距H面( 3 )、距W面( 6 )E点距V面( 2 )、距H面(0 )、距W面( 3 )F点距V面(6 )、距H面( 5 )、距W面( 0 )2-3、比较A、B、C三点的相对位置。
(下) mmB点在A点(左) mm(前) mm(上) mmB点在C点(左) mm(后) mm(下) mmC点在A点(右) mm(前) mm第二章点、直线、平面的投影————点的投影班级学号姓名32-4 已知E(22,30,20),F点在E点之左10mm,之下10mm,之后 10mm;G点在E点的正右方12mm,作出点E 、F 、G的三面投影。
2-5已知A(24,18,20),B点(24,18,0),以及点C在点A之右10mm,之上16mm,之前 12mm,作出点A 、B 、C的三面投影。
2-6 作出点D(30,0,20)、点E(0,0,20),以及点F在点D的正前方25mm,作出这三个点的三面投影。
1 3第二章点、直线、平面的投影————点的投影班级学号姓名52-7已知物体的立体图和投影图,试把A、B、C、D、E各点标注到投影图上的对应位置,并把重影点处不可见点加上括号。
2-8已知A、B两点是一对V面重影点,相距10mm;A、C两点是一对H面的重影点,C在H面上;D点在H面上,且在C后15mm,右15mm,求B、C、D三点的三面投影,并判别重影点的可见性。