文献翻译—四轮转向汽车的转向特性及控制技术
- 格式:doc
- 大小:78.00 KB
- 文档页数:11
四轮转向汽车的动特性及其鲁棒控制研究的开题报告一、研究背景和意义随着汽车工业的不断发展,四轮转向技术已逐渐成为汽车控制技术领域的研究热点。
四轮转向技术是一种能够增加汽车操控性和行驶稳定性的新技术,广泛应用于高端汽车中,如豪华轿车、跑车等。
四轮转向技术能够改善汽车的动态特性,提高车辆的灵活性、操控性和稳定性,因而对于提升汽车性能、提高驾驶舒适性和增加行驶安全具有重要意义。
在四轮转向汽车的动特性方面,目前的研究主要集中在仿真和实验两个方面。
在实验方面,通过搭建四轮转向汽车并进行实际测试,获取汽车运动学参数和控制系统数据,从而研究四轮转向汽车的行驶特性及其控制问题。
在仿真方面,应用虚拟仿真技术模拟不同环境下的车辆行驶情况,并进行控制算法的仿真验证,以提高四轮转向汽车控制算法的鲁棒性和性能。
基于此,本文将主要从四轮转向汽车的动特性及其鲁棒控制两个方面进行研究。
二、研究内容和方法(一)四轮转向汽车的动特性研究1、四轮转向汽车运动学模型的建立2、四轮转向汽车的行驶稳定性分析3、四轮转向汽车的操控性能评价(二)四轮转向汽车的鲁棒控制研究1、四轮转向汽车的控制系统设计2、四轮转向汽车控制策略的设计3、四轮转向汽车控制算法的仿真和实验验证研究方法主要包括理论分析和仿真验证。
通过搭建四轮转向汽车并进行测试实验,获取实际数据以验证理论分析的正确性。
运用MATLAB/Simulink等仿真软件,完成四轮转向汽车动力学仿真分析,优化控制策略,提高控制性能。
三、研究预期成果本文预期实现以下研究成果:1、建立四轮转向汽车的动力学模型,分析四轮转向汽车的动特性。
2、分析四轮转向汽车的行驶稳定性和操控性能,并进行评价。
3、设计四轮转向汽车的控制系统,并优化控制策略,提高车辆控制性能。
4、通过仿真和实验验证四轮转向汽车控制算法的鲁棒性和性能。
四、研究进度安排本文研究预计工作时间为一年。
研究进度安排如下:第1-2个月:文献综述,熟悉四轮转向汽车的相关技术和研究成果。
四轮转向系统简介四轮转向系统是一种汽车驾驶辅助技术,通过对车辆四个轮子的转向进行控制,改善车辆的操控性能和稳定性。
传统的汽车转向系统只控制前两个轮子的转向,而四轮转向系统可以同时控制前后轮的转向,使车辆转弯更加灵活,减少转向半径,提高车辆的稳定性和安全性。
工作原理四轮转向系统的工作原理主要在于对车辆四个轮子的转向进行独立控制。
传统的汽车转向系统是由转向柱、转向机构、转向杆等组成的,而四轮转向系统在此基础上增加了一个后轮转向系统。
后轮转向系统是通过电子控制单元(ECU)对车辆后轮进行转向控制。
具体的工作原理是,ECU通过收集车辆的各种传感器数据,包括车速、转向角度、转向力等,来判断车辆的行驶状态和转向需求。
根据这些信息,ECU会对车辆后轮进行相应的转向控制,使车辆在转弯时更加灵活和稳定。
四轮转向系统相比传统的转向系统具有以下几个优点:1.提高操控性能:四轮转向系统可以使车辆在转弯时更加敏捷和稳定。
通过控制后轮的转向角度,可以减小转弯半径,使车辆更容易进入弯道并保持稳定的操控。
2.增加安全性:四轮转向系统可以提高车辆的稳定性和抓地力。
在快速转弯或避让障碍物时,后轮转向系统可以提供额外的转向力,使车辆更容易保持控制并减少侧滑的风险。
3.提升驾乘舒适性:四轮转向系统可以在低速行驶时提供更小的转弯半径,使车辆更容易进入狭窄的空间。
此外,它还可以提供更好的转向反馈和悬挂调校,提高驾乘的舒适性和驾驶乐趣。
应用场景四轮转向系统通常应用于高性能汽车和豪华车型,以提升车辆的操控性能和安全性。
此外,四轮转向系统还可以应用于货车和工程车等特殊用途车辆,以提高车辆的转弯半径和机动性能。
四轮转向系统是一种提升汽车操控性能和安全性的重要技术。
它通过控制车辆前后轮的转向,使车辆在转弯时更加灵活、稳定和安全。
四轮转向系统在高性能汽车和豪华车型中得到广泛应用,同时也逐渐在特殊用途车辆上得到应用。
随着汽车技术的不断进步和发展,四轮转向系统将会成为未来汽车行业的重要发展方向之一。
四轮转向控制四轮转向系统(4WS)把后轮与前轮一起转向,是一种提高车辆反应性和稳定性的关键技术。
把后轮与前轮同相位转向,可以减小车辆转向时的旋转运动(横摆),改善高速行驶的稳定性。
把后轮与前轮逆相位转向,能够改善车辆中低速行驶的操纵性,提高快速转向性。
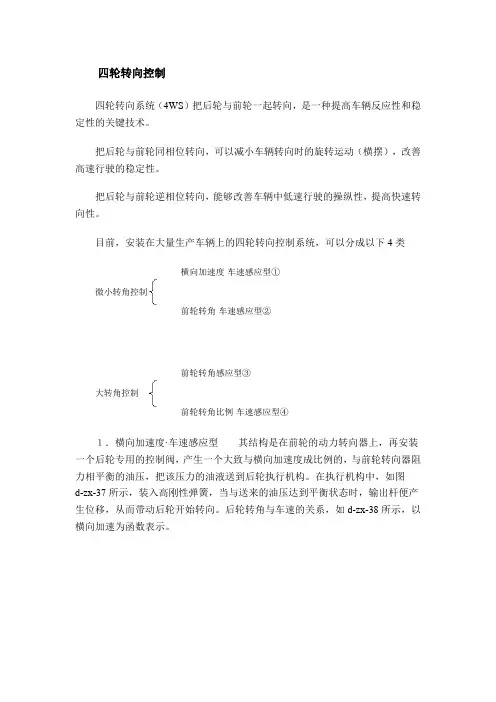
目前,安装在大量生产车辆上的四轮转向控制系统,可以分成以下4类横向加速度·车速感应型①微小转角控制前轮转角·车速感应型②前轮转角感应型③大转角控制前轮转角比例·车速感应型④1.横向加速度·车速感应型其结构是在前轮的动力转向器上,再安装一个后轮专用的控制阀,产生一个大致与横向加速度成比例的,与前轮转向器阻力相平衡的油压,把该压力的油液送到后轮执行机构。
在执行机构中,如图d-zx-37所示,装入高刚性弹簧,当与送来的油压达到平衡状态时,输出杆便产生位移,从而带动后轮开始转向。
后轮转角与车速的关系,如d-zx-38所示,以横向加速为函数表示。
1.储油罐2.泵3.前动力缸4.分配阀5.后动力缸6.弹簧7.控制器8.电磁阀图d-zx-372.前轮转角,车速感应型在该系统中,从油泵出来的油液直接流入图d-zx-39的电磁阀,车速传感器10,转角传感器11分别将车速和前轮转角信号输入计算机。
按计算机指令,控制油液流入后轮执行机构。
其后轮转角特性见图d-zx-401.储油罐2.泵3.前动力缸4.分配阀5.后动力缸6.弹簧7.控制器8.电磁阀9.切断阀10.车速传感器11.转角传感器。
图d-zx-39图d-zx-403.前轮转角感应型为了把前轮转角传给后轮,在前轮齿轮齿条式转向器的齿条轴上,安装了后轮转向齿轮,其角位移,通过中间传动轴,传给后轮转向器。
后轮具有小转角同相转向,大转角逆相转向的功能。
在微小转向的高速行驶时,形成了同相转向,获得了行驶稳定性,在大转角转向的极低速行驶时,变成逆相转向,获得了小半径转向性能。
4.前轮转角比例车速感应型在动力传至后轮转向轴之前,与前者基本相同,但后轮的执行机构由相位控制部分和动力补助部分构成。
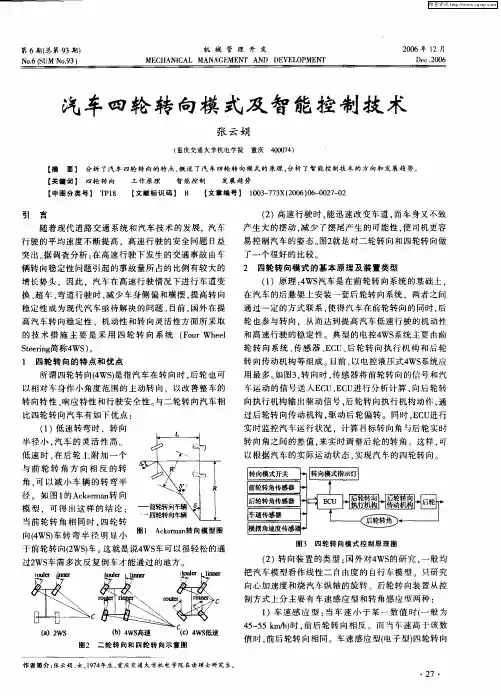
四轮转向汽车的转向特性及控制技术东南大学机械工程系汪东明摘要:本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理,介绍了四轮转向系统的控制策略,指出了四轮转向系统控制技术所面临的困难,并展望其发展趋势。
关键词:四轮转向;转向特点;工作原理;控制;发展。
1、引言随着现代道路交通系统和现代汽车技术的发展,人们对汽车的转向操纵性能和行驶稳定性的要求日益提高。
作为改善汽车操纵性能最有效的一种主动底盘控制技术——四轮转向技术,于二十世纪80年代中期开始在汽车上得到应用,并伴随着现代汽车工业的发展而不断发展。
汽车的四轮转向(Four-wheel Steering ——4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。
以改善汽车的转向机动性、操纵稳定性和行驶安全性。
2、四轮转向汽车的转向特性2·14WS汽车与2WS汽车转向过程分析普通两轮转向汽车(2WS汽车)的前轮既可绕自身的轮轴自转又可绕主销相对于车身偏转,而后轮只能自转而不偏转。
当驾驶员转动方向盘后,前轮转向,改变了行驶方向,地面对前轮胎产生一个横向力,通过前轮作用于车身,使车身横摆,产生离心力,使后轮产生侧偏,改变前进方向,参与汽车的转向运动。
而4WS汽车的后轮与前轮一样,既可自转也能偏转。
当驾驶员转动方向盘后,前、后轮几乎同时转向,使汽车改变前进方向,实现转向运动。
2WS汽车在转向时,前轮作主动转向,后轮只是作被动转向。
显然,2WS汽车在转向过程中,从方向盘转动到后轮参与转向运动之间存在一定的滞后时间。
2WS汽车的这种相位滞后特性使汽车转向的随动性变差,并使汽车的转向半径增大。
另外,2WS汽车在高速行驶时,相对于一定的方向盘转角增量、车身的横摆角速度和横向加速度的增量增大,使汽车在高速行驶时的操纵性和稳定性变差。
而4WS汽车在转向时,前、后轮都作主动转向,在转向过程中,灵敏度高,响应快,有效地克服了上述缺点。
现代汽车新技术——四轮转向技术(4WS)四轮转向技术(4WS)一、概述1、什么是4WS4 Wheel Steering 即除传统的前两轮转向外,后两轮也是转向轮。
提高高速行驶或侧向风作用下的操纵稳定性,改善低速行驶的操纵轻便性,减小转弯半径1980年代中期开始在轿车上应用2、四轮转向的几何运动关系2WS:后轮不转向,转向中心在后轴的延长线上4WS:后轮逆相转向,转中心比2WS车更靠近车辆,亦即转弯半径小四轮转向技术(4WS)u对于4WS 车,主要控制后轮的转向角u当后轮转向与前轮转向相同时称同相位转向u 当后轮转向与前轮转向相反时称逆相位转向3、后轮的两种转向方式四轮转向技术(4WS)u4、四轮转向的作用u四轮转向的主要目的是提高汽车在高速行驶或在侧向风力作用时的操纵稳定性u在汽车高速行驶时还易于由一个车道向另一个车道调整u改善在低速下的操纵轻便性,以及减小在停车场调车时的转弯半径u(1)4WS在高速行驶时的稳定性分析u4WS车高速行驶时,当受到侧向风或侧向路面干扰力时,车身姿态变化小,便于修正方向盘u在高速行驶时,后轮与前轮同相位转向,且转角较小u从转向盘到后轮转向的时间很短,转弯时车身姿态变化小,即目标行驶路线的跟踪性好u车身方向与实际行进方向没有很大差别,在高速行驶时具有稳定感u(2)4WS车在改变行车路线时的性能u后轮和前轮同一方向转动,在后轮也同样产生侧向力,于是车身的侧偏角小,甚至可以为零u汽车可以平顺地换道行使,从而提高了汽车的操纵稳定性u平动:纵向(surge)、横向(sway)、上下(heave)u转动:横摆(yaw)、侧倾(roll)、俯仰/点头(pitch)u在2WS车中,只有前轮转向,转角α,产生离心力,路面的侧向力(侧偏力)产生围绕重心的力矩u前轮转向初期,后轮直线行驶,无离心力,路面无侧向力u前轮路面的侧向力产生的围绕重心的力矩,使得车身围绕重心横向摆动(车身蛇形运动),操纵稳定性下降u理想的高速行驶转向,应该使车身方向与行进方向尽量一致,以抑制横向摆动u在4WS车中,前后轮同相转向,前后轮的同时产生离心力,路面的侧向力围绕重心的力矩互相平衡,抑制了横向摆动,保证了操纵稳定性四轮转向技术(4WS)(3)低速下的小转弯半径行驶当汽车在狭窄的停车场地转弯时,停车是否容易主要取决于转弯半径大小,4WS比2WS车转弯半径要小得多。

附录附录ASteering Behavior and Control Technology0f Four—wheel Steering AutomobiIeABSTRACTThis paper analyses the characteristics of car four-wheel steering control to, summarizes the principle of construction four-wheel steering cars. Introduced the four-wheel steering system control strategy. Points out the four-wheel steering system control technology faces difficulties, and prospects the trend of its development.Keywords: four-wheel steering; Steering characteristics; Working principle; Control; Development;1. IntroductionWith modern road traffic system and the development of modern automobile technology, people on the car's steering control performance and driving stability requirement is increasing day by day. As the most effective improve vehicle handling performance of a kind of active chassis control technology - four-wheel steering technology. In the 1980s began in cars get application, and as the modern automobile industry and continuous development. Car four-wheel steering means in turn, the rear car can be relative to body active steering, that the car can be up to four wheels role. To improve the car turned to maneuverability, handling stability and driving safety.2. The car's steering four-wheel steering2.1 4ws cars and 2ws steering process analysisOrdinary two wheel steering can not only the front car around its own wheel rotation and relative to body deflection around the precision, then wheel rotation and not only deflection. When the driver turned the steering wheel, front wheel steering, changed directions face front tyre, produced a transverse force, through the front wheel effect on body, make the body yawing and produce centrifugal force, the rear wheels cornering, produced change direction, participate in the sports car to. And the rear and front car 4ws as,can rotation can also deflection. When the driver turned the steering wheel, front and rear wheels, that car almost at the same time to change direction, realize steering movement.In turn, the 2ws car before active steering wheel rotation just makes passive steering. Obviously, 2ws cars in steering process from the steering wheel rotation to rear wheel steering movement in between the existence of certain lag time. This phase lag 2ws automobile steering characteristics make the servo sex becomes poor, and that the car steering radius increased. In addition, 2ws car at a high speed, the steering wheel Angle relative to certain incremental, body yaw-rate and lateral acceleration incremental increases, made the car at a high speed handling and stability becomes poor. And in turn, the car 4ws has done before, rear wheel steering, active in the process of steering, high sensitivity, fast response, effectively overcome the shortcomings.2.2 4ws automobile steering wayAccording to the theory analysis and road test showed that a four-wheel steering can improve the maneuverability and steering control stability of high speed, modern 4ws car is developed according to the guiding ideology. Generally speaking, in the process of steering cars in 4ws, according to different driving conditions, front and rear wheel steering Angle should follow certain rules between. At present, the front, rear typical 4ws deflection rules generally are described below:(a) inverse phase steeringAs shown in figure A1 (a) shows, steering wheel Angle at low speeds or larger, front and rear inverse phase shift, realize that the rear wheels with the front deflect deflect instead, and with the steering wheel Angle deflection Angle increases and increases in a certain range. This redirection speed way can improve the manipulation of the car, reduce automobile portability turning radius, making cars maneuverability. Easy car turned turn, obstacle avoidance and driving, garage and parking. As for cars, if rear inverse phase 5 °, then turned can reduce minimum steering radius was about 0.5.(b) phase with steeringAs shown in figure A1 (b) shows, in a high-speed or steering wheel Angle is lesser, front and rear wheels with phase shift, realize that the rear wheels deflect the deflection direction with front wheel. Make the car body yaw-rate greatly reduce automobile body, can reduce the tendency of cornering undergo dynamic, guarantee the overtaking the highway, elevated highway, in and out, in the approach and flyovers insufficient steering state. Now, there are many 4ws cars take improving vehicle handling performance focuses on making cars on high-speed steering stability, without excessive demands in low-speed driving car course-altering maneuvers flexibility. The features is low by front wheel steering car only when only in car speeds, after up to a certain value, rear, only participate in steering phase with four-wheel steering.(a)Reverse a steering (b)Coincidental a steeringFigure A1 four-wheel steering the front of the car, rear deflection rule3. Four-wheel steering car components and working characteristics4ws car is in front wheel steering system, and on the basis of suspension in cars on install a set of rear wheel steering system, both through certain questions of contact, making cars in front wheel steering also participate in the meanwhile, rear wheel steering. After decades of research and development, have molding 4ws car type has a variety of, composition, structure is different, working principle and control methods vary. The typical electric 4ws system mainly by the front wheel steering system, sensors, ECU, rear wheel steering actuators and rear wheel steering transmission mechanism etc. the sensor will front wheel steering motor sports the signal and the signal into ECU were analyzed and calculated, will process after the drive signal to rear wheel steering actuators, rear wheel steering actuators action, through the rear wheel steering transmission mechanism, rear wheel deflection. Meanwhile, ECU when carried out monitoring car operation condition, calculate target steering Angle and rear real-time steering Angle, the difference in value between real-time adjustment to rear wheels corner. Such, can according to the actual sports car, to realize the state car four-wheel steering. General 4ws cars equipped with two turning mode, can enter 4ws state, also can keep the traditional 2ws state, drivers can pass the driving indoor steering mode switch selection. When 4ws car in the course of driving the electronic control system malfunction, rear wheel automatic back into the middle, the automatic into the front wheel steering state, ensure like ordinary front wheel steering car driving safely as automobiles. Meanwhile, dashboard "4ws" indicator, warning drivers, stored on ECU fault condition of warranty, so that by yards.4. Four-wheel steering control of the car4ws system not only to realize the need for automotive steering movement, and guarantee the vehicle steering traveling stability. At present, in the research and development of automobile 4ws centered on improving car, the transient manipulation stability as a starting point, explore due to rear brought car in response to changes, and adopts various rear wheel control strategy and produce different effect. Auto four-wheelsteering control depends on tires were lateral force, four-wheel steering can make cars in turn, the rear directly involved in for car yawing movement and lateralizing control. Through timely, accurate control of the rear wheel steering Angle, not only can shorten the process of steering the transient response, and can actively control cars the trajectory and attitude. In turn, that the car during its longitudinal direction centerline of the direction, even with the direction of the car horn decreases overlap, attitude Angle of steering bodywork cornering, improves the lateral stability car.4.1 control goalsThat car in turn to basic keep PianJiao zero gravity side car. So can greatly improve the car to the steering wheel input dynamic response characteristics, largely improved yaw-rate and lateral acceleration of transient performance indicators, lower the body posture change. From the PianJiao zero target start. According to certain control program is to realize the rear wheels to function is derived based four-wheel steering. Of course, the modern 4ws cars also have some other control goal request.4.2 control strategy model basedThe general situation of the studies are 4ws system based on a simple dof vehicle model of linear. This is just a kind of utopian mathematical model, when modeling overlooked in some of the dynamic parameters of the car without considering changes, automobile driving produces in the process of many of the random uncertainties and not very accurate. Early 4ws controller design are based on linear dynamic equation with the hypothesis, but due to the above reasons, make the design of control system doesn't meet practical needs, there is no guarantee that the vehicle steering control stability.4.3 control methodDifferent cars driving performance requirements of steering and different models of the car wheels deflection 4ws law is not the same. Thus, different 4ws vehicle USES control method is endless and same, various control method has its emphases respectively. At present, in some molding 4ws with car on the control method basically has:(a). The set than simply steering system 4ws.(b). Than before, rear wheel steering front-wheel corner function 4ws system.(c).Than before, rear wheel steering j speed function 4ws system is.(d). The 4ws with first-order lagging system.(e).With reversed-phase characteristics 4ws system(f). With optimal control characteristics of 4ws system.(g). Has since learning, white the ability to adjust the 4ws system.Former five kinds of control system belong to classical control theory category, only to satisfy car under certain conditions, but also can't adapt to the need of motor sports of random changes, along with the computer technology and some advanced control theory ofdevelopment, 4ws system will towards adaptive, intelligent direction.4.4 4ws system control technology developmentAt present, for research and development of car 4ws remains constant developing and perfecting stage. Although researchers from structure to control principle of four-wheel steering on have done a lot of research, 4ws technology have made many progress. But, in the use of modern control theory of automotive steering control strategy choice of methods of determination and control, mainly depend on experience, the corresponding theoretical basis is still very lack, 4ws technology not really into wide use in commercial car on stage, no widely used.In the technology in relatively mature 4ws cars, most use electric hydraulic power 4ws system. With the rapid development of electronic technology, computer technology in cars, the wide application of electronic electric 4ws system will be the trend of the development of automobile 4ws. Although in 4ws system research and development has made great development, however, as the core technical problems 4ws system - 4ws system controller design, what on earth as the best control objectives? Adopt what kind of control method? Still no in this field is the same view. Already, early before of the 4ws and the system based on a simple dof vehicle model, linear controller design are based on 4ws with linear dynamic equation hypothesis, PID control strategy. We know, 4ws system control mainly dependent on tires were transverse force. Early studies is the automobile tires as linear model, general 4ws control is based on the transverse force by tire wheel in proportion to the side PianJiao assumptions, this assumption just in the lateral acceleration smaller range effective. When in the lateral acceleration larger range, tire cornering characteristics of nonlinear area, will go to one side of the PianJiao tyres by transverse force in the response of the relationship of scale, and no longer the longitudinal force by tire vertical load, etc, have relations. In fact, car in turning down the street, tire basically all work in nonlinear area. At this time, garnish with linear control theory for research, appear reluctant to. 4ws vehicle handling dynamics problems is very complicated nonlinear multibody dynamics problems of the control system for 4ws research should be taken into account in the sports car, in-depth study of affecting its state response, establish simulation kinetic parameters of actual sports car mathematical model, adopt more effective control strategy. With the continuous development of control technology, some advanced modern control method has been applied in 4ws system control study, as optimal control and adaptive control, sliding mode control, robust control etc, in recent years, appeared again fuzzy control, based on artificial neural network theory, control method, etc. The study of 4ws control system from linear field gradually transition to nonlinear fields, some multi-degree-of-freedom car dynamics models have proposed 4ws, but mostly in infancy, is not mature. The future of the development of the system is studied 4ws trend for mainly concentrated :(a). Further research and development of new rear wheel steering actuators and rear wheel steering transmission mechanism, improve the manipulation of steering portability, flexibility and steering Angle of accuracy.(b). For 4ws system, further development, design high performance, high precision, high sensitivity sensor, in order to correctly detection car sports signal.(c). Deep study turning the tyre during transient characteristics as the main factors, to join in the mathematic model of the system 4ws.(d). The control theory and control into method is applied to the 4ws controller study.附录B四轮转向汽车的转向特性及控制技术摘要本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理。
四轮转向技术介绍四轮转向技术,也叫四轮转向系统,是一种车辆操控技术,通过控制车轮的转向角度和速度来改变车辆的行驶方向和半径。
相比传统的两轮转向系统,四轮转向技术可以提供更好的操控性能和稳定性,适用于各种道路和驾驶条件。
本文将介绍四轮转向技术的原理、类型和优势。
四轮转向技术的原理主要包括前轮转向和后轮转向。
前轮转向是指前轮和后轮通过机械、液压或电子装置来实现转向,并且可以根据车速和驾驶条件自动调整转向角度。
后轮转向是指后轮可以与前轮同时或单独转动,通过改变后轮的转向角度和速度来改变车辆的行驶方向和半径。
通过控制前、后轮的转向,四轮转向技术可以实现更小的转弯半径和更灵活的操控性能。
根据转向方式的不同,四轮转向技术可以分为主动四轮转向和被动四轮转向。
主动四轮转向技术是指通过电子控制系统主动控制前、后轮的转向,根据驾驶者的操作和驾驶条件来调整转向角度和速度。
主动四轮转向技术可以提供更好的操控性能和稳定性,特别在高速行驶和紧急躲避等情况下具有明显的优势。
例如,高速行驶时,后轮可以和前轮呈相反的转向角度,以提供更好的稳定性和操控性能;在紧急躲避行驶时,后轮可以和前轮呈相同的转向角度,以提供更小的转弯半径和更灵活的操控性能。
被动四轮转向技术是指通过机械或液压装置来实现前、后轮的转向,根据车辆的行驶速度和转弯半径自动调整转向角度和速度。
被动四轮转向技术可以提供更好的稳定性和操控性能,特别在低速行驶和转弯时具有明显的优势。
例如,在低速行驶时,后轮可以与前轮呈相同的转向角度,以提供更好的转弯稳定性和操控性能;在转弯时,后轮可以和前轮呈相反的转向角度,以提供更小的转弯半径和更灵活的操控性能。
首先,四轮转向技术可以提供更小的转弯半径和更灵活的操控性能。
无论是在城市道路还是山区弯道,四轮转向技术都可以使车辆更容易转弯,提高行驶的灵活性和安全性。
其次,四轮转向技术可以提供更好的稳定性和操控性能。
通过调整前、后轮的转向角度和速度,四轮转向技术可以使车辆更稳定地行驶,在高速行驶和紧急躲避等情况下保持良好的操控性能。
四轮转向汽车的转向特性及控制技术东南大学机械工程系汪东明摘要:本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理,介绍了四轮转向系统的控制策略,指出了四轮转向系统控制技术所面临的困难,并展望其发展趋势。
关键词:四轮转向;转向特点;工作原理;控制;发展。
1、引言随着现代道路交通系统和现代汽车技术的发展,人们对汽车的转向操纵性能和行驶稳定性的要求日益提高。
作为改善汽车操纵性能最有效的一种主动底盘控制技术——四轮转向技术,于二十世纪80年代中期开始在汽车上得到应用,并伴随着现代汽车工业的发展而不断发展。
汽车的四轮转向(Four-wheel Steering ——4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。
以改善汽车的转向机动性、操纵稳定性和行驶安全性。
2、四轮转向汽车的转向特性2·14WS汽车与2WS汽车转向过程分析普通两轮转向汽车(2WS汽车)的前轮既可绕自身的轮轴自转又可绕主销相对于车身偏转,而后轮只能自转而不偏转。
当驾驶员转动方向盘后,前轮转向,改变了行驶方向,地面对前轮胎产生一个横向力,通过前轮作用于车身,使车身横摆,产生离心力,使后轮产生侧偏,改变前进方向,参与汽车的转向运动。
而4WS汽车的后轮与前轮一样,既可自转也能偏转。
当驾驶员转动方向盘后,前、后轮几乎同时转向,使汽车改变前进方向,实现转向运动。
2WS汽车在转向时,前轮作主动转向,后轮只是作被动转向。
显然,2WS汽车在转向过程中,从方向盘转动到后轮参与转向运动之间存在一定的滞后时间。
2WS汽车的这种相位滞后特性使汽车转向的随动性变差,并使汽车的转向半径增大。
另外,2WS汽车在高速行驶时,相对于一定的方向盘转角增量、车身的横摆角速度和横向加速度的增量增大,使汽车在高速行驶时的操纵性和稳定性变差。
而4WS汽车在转向时,前、后轮都作主动转向,在转向过程中,灵敏度高,响应快,有效地克服了上述缺点。
汽车转向系统的历史汽车转向系统在车辆系统中是最基础的系统,驾驶员通过方向盘操纵和控制汽车的行驶方向,从而实现了他的行驶意图。
100多年里,汽车行业中机械和电子技术的发展。
如今,汽车已经不是纯粹的机械,它是机械、电子和其他材料等的综合产品。
汽车产业的转向系统的发展,经过了漫长的变革。
传统的转向系统是机械转向系统,汽车的方向盘通过试点,通过这样一系列的机械零件使方向盘实现偏转,从而实现转向的控制。
由于在20世纪50年代,液压助力转向系统在汽车上的应用,标志着转向系统又进入一个新的开始。
汽车转向系统的动力源从人力转变为液压助力转向。
转向系统增加了液压助力器,高压钠灯(液压助力转向)是基于机械和液压系统。
液压系统和发动机,发动机开始时一部分是汽车发动机的功率,另一部分的功率是液压系统的动能。
由于其工作可靠,成熟的技术已被广泛使用。
转向系统的主要特点是流体的压力,减少驾驶员在方向盘的支持,提高了转向灯和自动运行的稳定性。
但同时,也有一些液压动力系统的缺陷。
针对汽车设计和制造,完成后的车辆转向动态特性无法改变。
其直接后果是,在低功率时汽车的部分的动力特性可以得到很好的发挥,但在高速期间有良好的方式来检测,因为是不可调整的动力特性,没有更好的方式驱动,当动力学特征高功率时,而不是非常善于低段的效果好。
如果没有看准车辆的液压系统,还必须是发动机驱动。
因此,能源消耗提高燃油发动机,现有的液压油泄漏问题不仅污染环境,容易到其他组件,针对气温低,液压系统的性能较差。
近年来,随着电子技术的广泛应用,转向系统也越来越多地使用电子设备。
变成电子控制系统,因此,相应的出现了电动助力转向系统。
电液动力转向可以分为两大类:电动液压转向系统(电液压动力 - EHPS)和电动液压转向,电控ECHPS转向(液压助力转向)。
电动液压助力转向系统是在液压系统的液压助力系统的发展的基础上,不同的是,在液压系统动力源的电动液压动力系统,但不是由汽车发动机电机驱动液压系统,节约能源和减少发动机的燃料消耗。
X应用职业技术学院毕业设计(论文)精品合同,仅供参考,需要可下载使用!X应用职业技术学院毕业论文教务处制X应用职业技术学院毕业设计(论文)摘要四轮转向(4WS,4 Wheel Steering)除了传统的以前轮为转向轮,后两轮也是转向轮,即四轮转向。
在20世纪80年代中期开始发展,其主要目的是提高汽车在高速行驶或在侧向风力作用时的操作稳定性,改善在低速下的操纵轻便性,以及减小在停车场时的转弯半径。
四轮转向主要有两种方式:当后轮转向与前轮转向方向相同时称为同向位转向;当后轮转向与前轮转向方向相反时称为逆向位转向。
将横摆力矩控制(DYC)与四轮转向(4WS)系统相结合,建立侧偏角和横摆角速度具有最佳输出响应的车辆理想模型。
采用前馈和反馈控制相结合跟踪理想模型的控制策略,设计出最优控制器,并分别在低速和高速下进行仿真分析。
结果表明:四轮转向模型与横摆力矩控制相结合,采用跟踪理想模型的控制策略能够有效地同时控制汽车转向侧偏角和横摆角速度,得到较好的瞬态及稳态响应,有效地减轻驾驶员操纵负担,提高了车辆操纵稳定性。
尤其在高速行驶时,仍能获得较好的输出响应,利于提高行车安全性。
关键词:四轮转向;组成;构造;原理;优缺点;安全AbstractFour-wheel steering (4WS, 4 Wheel Steering) before addition to the traditional round of the steering wheel, steering wheel after two rounds is that the four-wheel steering. In the 20th century began to develop the mid-80s, its main purpose is to improve the car at high speeds or when the lateral wind loads, operational stability, improve the manipulation of light at low speed, as well as reduce the turning radius in the parking lot. Four-wheel steering mainly in two ways: when the rear wheel steering and front wheel steering in the same direction as the same shift to the position; when the rear wheel steering and front wheel steering in the opposite direction is called reverse position when turning.The yaw moment control (DYC) and four-wheel steering (4WS) system combined with the establishment slip angle and yaw rate vehicle response with the best output of the ideal model. Feedforward and feedback control by the combination of the ideal model tracking control strategy, design the optimal controller, respectively, under the low and high speed simulation. The results showed that: four-wheel steering and yaw moment control model combined with the ideal model tracking control strategy can effectively control both steering slip angle and yaw rate, get a better transient and steady-state response, effectively reduce the burden on the driver control to improve vehicle handling and stability. Especially in high speed, can still get a better output response, which will help improve traffic safety.Keywords: four-wheel steering; composition; structure; principle; advantages and disadvantages; Security目录摘要 (I)Abstract (II)第1章绪论 (1)第2章四轮转向 (2)2.1 四轮转向 (2)2.2 四轮转向的组成 (2)第3章四轮转向系统 (4)3.1 四轮转向系统的结构 (4)3.2 四轮转向系统的原理 (6)3.3 四轮转向系统的类型 (6)第4章 Quadrasteer四轮转向系统 (6)4.1 Quadrasteer四轮转向系统工作原理 (7)4.2 Quadrasteer四轮转向系统优点 (8)第5章安全 (9)第6章前轮转向与四轮转向比较 (10)第7章四轮转向系统的发展 (11)结论 (12)致谢 (13)参考文献 (14)第1章绪论随着现代电子科技突飞猛进的发展,很多先进的电子产品已经应用到汽车产业当中。
附录附录ASteering Behavior and Control Technology0f Four—wheel Steering AutomobiIeABSTRACTThis paper analyses the characteristics of car four-wheel steering control to, summarizes the principle of construction four-wheel steering cars. Introduced the four-wheel steering system control strategy. Points out the four-wheel steering system control technology faces difficulties, and prospects the trend of its development.Keywords: four-wheel steering; Steering characteristics; Working principle; Control; Development;1. IntroductionWith modern road traffic system and the development of modern automobile technology, people on the car's steering control performance and driving stability requirement is increasing day by day. As the most effective improve vehicle handling performance of a kind of active chassis control technology - four-wheel steering technology. In the 1980s began in cars get application, and as the modern automobile industry and continuous development. Car four-wheel steering means in turn, the rear car can be relative to body active steering, that the car can be up to four wheels role. To improve the car turned to maneuverability, handling stability and driving safety.2. The car's steering four-wheel steering2.1 4ws cars and 2ws steering process analysisOrdinary two wheel steering can not only the front car around its own wheel rotation and relative to body deflection around the precision, then wheel rotation and not only deflection. When the driver turned the steering wheel, front wheel steering, changed directions face front tyre, produced a transverse force, through the front wheel effect on body, make the body yawing and produce centrifugal force, the rear wheels cornering, produced change direction, participate in the sports car to. And the rear and front car 4ws as,can rotation can also deflection. When the driver turned the steering wheel, front and rear wheels, that car almost at the same time to change direction, realize steering movement.In turn, the 2ws car before active steering wheel rotation just makes passive steering. Obviously, 2ws cars in steering process from the steering wheel rotation to rear wheel steering movement in between the existence of certain lag time. This phase lag 2ws automobile steering characteristics make the servo sex becomes poor, and that the car steering radius increased. In addition, 2ws car at a high speed, the steering wheel Angle relative to certain incremental, body yaw-rate and lateral acceleration incremental increases, made the car at a high speed handling and stability becomes poor. And in turn, the car 4ws has done before, rear wheel steering, active in the process of steering, high sensitivity, fast response, effectively overcome the shortcomings.2.2 4ws automobile steering wayAccording to the theory analysis and road test showed that a four-wheel steering can improve the maneuverability and steering control stability of high speed, modern 4ws car is developed according to the guiding ideology. Generally speaking, in the process of steering cars in 4ws, according to different driving conditions, front and rear wheel steering Angle should follow certain rules between. At present, the front, rear typical 4ws deflection rules generally are described below:(a) inverse phase steeringAs shown in figure A1 (a) shows, steering wheel Angle at low speeds or larger, front and rear inverse phase shift, realize that the rear wheels with the front deflect deflect instead, and with the steering wheel Angle deflection Angle increases and increases in a certain range. This redirection speed way can improve the manipulation of the car, reduce automobile portability turning radius, making cars maneuverability. Easy car turned turn, obstacle avoidance and driving, garage and parking. As for cars, if rear inverse phase 5 °, then turned can reduce minimum steering radius was about 0.5.(b) phase with steeringAs shown in figure A1 (b) shows, in a high-speed or steering wheel Angle is lesser, front and rear wheels with phase shift, realize that the rear wheels deflect the deflection direction with front wheel. Make the car body yaw-rate greatly reduce automobile body, can reduce the tendency of cornering undergo dynamic, guarantee the overtaking the highway, elevated highway, in and out, in the approach and flyovers insufficient steering state. Now, there are many 4ws cars take improving vehicle handling performance focuses on making cars on high-speed steering stability, without excessive demands in low-speed driving car course-altering maneuvers flexibility. The features is low by front wheel steering car only when only in car speeds, after up to a certain value, rear, only participate in steering phase with four-wheel steering.(a)Reverse a steering (b)Coincidental a steeringFigure A1 four-wheel steering the front of the car, rear deflection rule3. Four-wheel steering car components and working characteristics4ws car is in front wheel steering system, and on the basis of suspension in cars on install a set of rear wheel steering system, both through certain questions of contact, making cars in front wheel steering also participate in the meanwhile, rear wheel steering. After decades of research and development, have molding 4ws car type has a variety of, composition, structure is different, working principle and control methods vary. The typical electric 4ws system mainly by the front wheel steering system, sensors, ECU, rear wheel steering actuators and rear wheel steering transmission mechanism etc. the sensor will front wheel steering motor sports the signal and the signal into ECU were analyzed and calculated, will process after the drive signal to rear wheel steering actuators, rear wheel steering actuators action, through the rear wheel steering transmission mechanism, rear wheel deflection. Meanwhile, ECU when carried out monitoring car operation condition, calculate target steering Angle and rear real-time steering Angle, the difference in value between real-time adjustment to rear wheels corner. Such, can according to the actual sports car, to realize the state car four-wheel steering. General 4ws cars equipped with two turning mode, can enter 4ws state, also can keep the traditional 2ws state, drivers can pass the driving indoor steering mode switch selection. When 4ws car in the course of driving the electronic control system malfunction, rear wheel automatic back into the middle, the automatic into the front wheel steering state, ensure like ordinary front wheel steering car driving safely as automobiles. Meanwhile, dashboard "4ws" indicator, warning drivers, stored on ECU fault condition of warranty, so that by yards.4. Four-wheel steering control of the car4ws system not only to realize the need for automotive steering movement, and guarantee the vehicle steering traveling stability. At present, in the research and development of automobile 4ws centered on improving car, the transient manipulation stability as a starting point, explore due to rear brought car in response to changes, and adopts various rear wheel control strategy and produce different effect. Auto four-wheelsteering control depends on tires were lateral force, four-wheel steering can make cars in turn, the rear directly involved in for car yawing movement and lateralizing control. Through timely, accurate control of the rear wheel steering Angle, not only can shorten the process of steering the transient response, and can actively control cars the trajectory and attitude. In turn, that the car during its longitudinal direction centerline of the direction, even with the direction of the car horn decreases overlap, attitude Angle of steering bodywork cornering, improves the lateral stability car.4.1 control goalsThat car in turn to basic keep PianJiao zero gravity side car. So can greatly improve the car to the steering wheel input dynamic response characteristics, largely improved yaw-rate and lateral acceleration of transient performance indicators, lower the body posture change. From the PianJiao zero target start. According to certain control program is to realize the rear wheels to function is derived based four-wheel steering. Of course, the modern 4ws cars also have some other control goal request.4.2 control strategy model basedThe general situation of the studies are 4ws system based on a simple dof vehicle model of linear. This is just a kind of utopian mathematical model, when modeling overlooked in some of the dynamic parameters of the car without considering changes, automobile driving produces in the process of many of the random uncertainties and not very accurate. Early 4ws controller design are based on linear dynamic equation with the hypothesis, but due to the above reasons, make the design of control system doesn't meet practical needs, there is no guarantee that the vehicle steering control stability.4.3 control methodDifferent cars driving performance requirements of steering and different models of the car wheels deflection 4ws law is not the same. Thus, different 4ws vehicle USES control method is endless and same, various control method has its emphases respectively. At present, in some molding 4ws with car on the control method basically has:(a). The set than simply steering system 4ws.(b). Than before, rear wheel steering front-wheel corner function 4ws system.(c).Than before, rear wheel steering j speed function 4ws system is.(d). The 4ws with first-order lagging system.(e).With reversed-phase characteristics 4ws system(f). With optimal control characteristics of 4ws system.(g). Has since learning, white the ability to adjust the 4ws system.Former five kinds of control system belong to classical control theory category, only to satisfy car under certain conditions, but also can't adapt to the need of motor sports of random changes, along with the computer technology and some advanced control theory ofdevelopment, 4ws system will towards adaptive, intelligent direction.4.4 4ws system control technology developmentAt present, for research and development of car 4ws remains constant developing and perfecting stage. Although researchers from structure to control principle of four-wheel steering on have done a lot of research, 4ws technology have made many progress. But, in the use of modern control theory of automotive steering control strategy choice of methods of determination and control, mainly depend on experience, the corresponding theoretical basis is still very lack, 4ws technology not really into wide use in commercial car on stage, no widely used.In the technology in relatively mature 4ws cars, most use electric hydraulic power 4ws system. With the rapid development of electronic technology, computer technology in cars, the wide application of electronic electric 4ws system will be the trend of the development of automobile 4ws. Although in 4ws system research and development has made great development, however, as the core technical problems 4ws system - 4ws system controller design, what on earth as the best control objectives? Adopt what kind of control method? Still no in this field is the same view. Already, early before of the 4ws and the system based on a simple dof vehicle model, linear controller design are based on 4ws with linear dynamic equation hypothesis, PID control strategy. We know, 4ws system control mainly dependent on tires were transverse force. Early studies is the automobile tires as linear model, general 4ws control is based on the transverse force by tire wheel in proportion to the side PianJiao assumptions, this assumption just in the lateral acceleration smaller range effective. When in the lateral acceleration larger range, tire cornering characteristics of nonlinear area, will go to one side of the PianJiao tyres by transverse force in the response of the relationship of scale, and no longer the longitudinal force by tire vertical load, etc, have relations. In fact, car in turning down the street, tire basically all work in nonlinear area. At this time, garnish with linear control theory for research, appear reluctant to. 4ws vehicle handling dynamics problems is very complicated nonlinear multibody dynamics problems of the control system for 4ws research should be taken into account in the sports car, in-depth study of affecting its state response, establish simulation kinetic parameters of actual sports car mathematical model, adopt more effective control strategy. With the continuous development of control technology, some advanced modern control method has been applied in 4ws system control study, as optimal control and adaptive control, sliding mode control, robust control etc, in recent years, appeared again fuzzy control, based on artificial neural network theory, control method, etc. The study of 4ws control system from linear field gradually transition to nonlinear fields, some multi-degree-of-freedom car dynamics models have proposed 4ws, but mostly in infancy, is not mature. The future of the development of the system is studied 4ws trend for mainly concentrated :(a). Further research and development of new rear wheel steering actuators and rear wheel steering transmission mechanism, improve the manipulation of steering portability, flexibility and steering Angle of accuracy.(b). For 4ws system, further development, design high performance, high precision, high sensitivity sensor, in order to correctly detection car sports signal.(c). Deep study turning the tyre during transient characteristics as the main factors, to join in the mathematic model of the system 4ws.(d). The control theory and control into method is applied to the 4ws controller study.附录B四轮转向汽车的转向特性及控制技术摘要本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理。