旋转电弧传感器机械结构设计毕业设计(论文)封面
- 格式:doc
- 大小:35.50 KB
- 文档页数:1
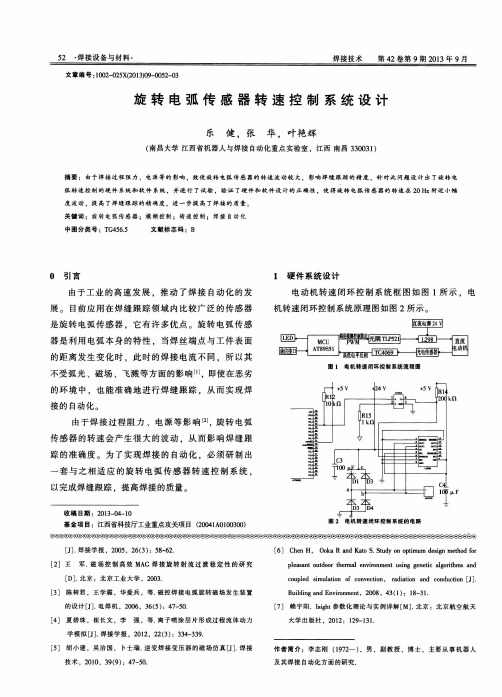
52焊接设备与材料焊接技术第42卷第9期2013年9月文章编号:1002一025x(2013)09—0052—03旋转电弧传感器转速控制系统设计乐健,张华,叶艳辉(南昌大学江西省机器人与焊接自动化重点实验室。
江西南昌330031)摘要:由于焊接过程阻力、电源等的影响,致使旋转电弧传感器的转速波动较大.影响焊缝跟踪的精度,针对此问题设计出了旋转电弧转速控制的硬件系统和软件系统。
并进行了试验,验证了硬件和软件设计的正确性,使得旋转电弧传感器的转速在20H z附近小幅度波动,提高了焊缝跟踪的精确度,进一步提高了焊接的质量。
关键词:旋转电弧传感器;模糊控制;转速控制;焊接自动化中图分类号:T G456.5文献标志码:B0引言由于工业的高速发展.推动了焊接自动化的发展。
目前应用在焊缝跟踪领域内比较广泛的传感器是旋转电弧传感器。
它有许多优点。
旋转电弧传感器是利用电弧本身的特性,当焊丝端点与工件表面的距离发生变化时,此时的焊接电流不同,所以其不受弧光、磁场、飞溅等方面的影响…,即使在恶劣的环境中,也能准确地进行焊缝跟踪,从而实现焊接的自动化。
由于焊接过程阻力、电源等影响[2],旋转电弧传感器的转速会产生很大的波动。
从而影响焊缝跟踪的准确度。
为了实现焊接的自动化,必须研制出一套与之相适应的旋转电弧传感器转速控制系统,以完成焊缝跟踪,提高焊接的质量。
收稿日期:2013一04一10基金项目:江西省科技厅工业重点攻关项目(20041A0100300)1硬件系统设计电动机转速闭环控制系统框图如图1所示.电机转速闭环控制系统原理图如图2所示。
图1电机转速闭环控制系统流程圈图2电机转速闭环控制系统的电路[J].焊接学报,2005,26(3):58—62.[2]王军.磁场控制高效M A G焊接旋转射流过渡稳定性的研究[D].北京:北京工业大学,2003.[3]陈树君,王学震,华爱兵,等.磁控焊接电弧旋转磁场发生装置的设计[J].电焊机,2006,36(5):47—50.[4]夏碧珠,崔长文。
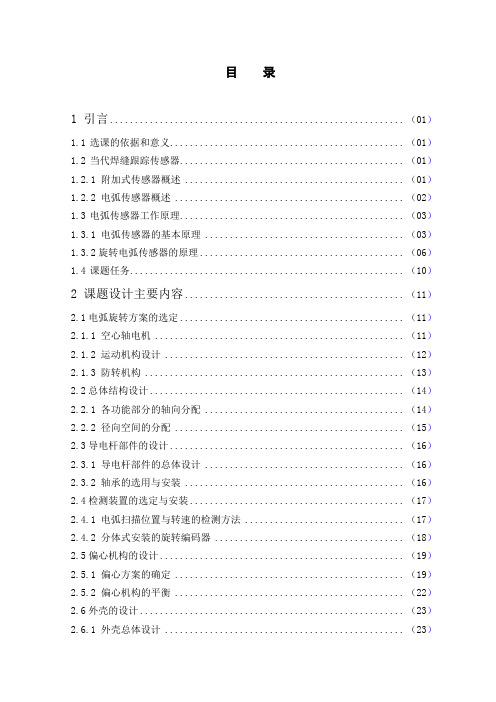
目录1 引言 (01)1.1选课的依据和意义 (01)1.2当代焊缝跟踪传感器 (01)1.2.1 附加式传感器概述 (01)1.2.2 电弧传感器概述 (02)1.3电弧传感器工作原理 (03)1.3.1 电弧传感器的基本原理 (03)1.3.2旋转电弧传感器的原理 (06)1.4课题任务 (10)2 课题设计主要内容 (11)2.1电弧旋转方案的选定 (11)2.1.1 空心轴电机 (11)2.1.2 运动机构设计 (12)2.1.3 防转机构 (13)2.2总体结构设计 (14)2.2.1 各功能部分的轴向分配 (14)2.2.2 径向空间的分配 (15)2.3导电杆部件的设计 (16)2.3.1 导电杆部件的总体设计 (16)2.3.2 轴承的选用与安装 (16)2.4检测装置的选定与安装 (17)2.4.1 电弧扫描位置与转速的检测方法 (17)2.4.2 分体式安装的旋转编码器 (18)2.5偏心机构的设计 (19)2.5.1 偏心方案的确定 (19)2.5.2 偏心机构的平衡 (22)2.6外壳的设计 (23)2.6.1 外壳总体设计 (23)2.6.2 通水方式 (24)2.6.3 通气方式 (25)2.7绝缘与密封设计 (26)2.7.1 绝缘设计 (26)2.7.2 密封设计 (27)2.8其它零部件的设计 (28)2.8.1 集线盖与接地装置 (28)2.8.2 安装设计 (30)2.8.3 修配方案设计 (30)2.9设计参数 (31)3结论 (32)3.1课题设计过程总结 (32)3.2课题设计的缺陷与后续工作 (32)参考文献 (34)致谢 (36)附录 (37)1 引言1.1 选课的依据和意义现代焊接诞生至今仅百余年,但已显示出生命力,焊接在近代工业的发展中发挥了不可替代的重要作用。
焊接不仅是一种重要的基础工艺,而且已发展成为一种新兴的综合工业技术。
它广泛应用于造船、压力容器制造,石油化工等钢结构制造领域。

旋转式电弧传感器技术的研究现状及发展趋势-工程论文旋转式电弧传感器技术的研究现状及发展趋势杜舜尧① DU Shun-yao;陈明和① CHEN Ming-he;吴诗语② WU Shi-yu(①南京航空航天大学机电学院,南京210016;②南京工业大学先进材料研究院,南京210009)(①College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;②Institute of Advanced Materials,Nanjing Tech University,Nanjing 210009,China)摘要:文章介绍了旋转式电弧传感器技术的研究背景,综述国内外旋转式电弧传感器技术的研究现状,并对旋转式电弧传感器技术的未来发展趋势作了展望。
Abstract:This paper describes the research background of rotating arc sensor technology. Domestic and foreign research situation of rotating arc sensor technology is reviewed. At the same time,the future development trends of rotating arc sensor technology are provided.关键词:旋转式电弧传感器技术;研究背景;研究现状;发展趋势Key words:rotating arc sensor technology;research background;research situation;development trends中图分类号:TG441.3文献标识码:A文章编号:1006-4311(2015)25-0127-04收稿日期:2015年7月12日。
![一种旋转电弧传感器[实用新型专利]](https://img.taocdn.com/s1/m/a36ae8c5b4daa58da1114a36.png)
专利名称:一种旋转电弧传感器专利类型:实用新型专利
发明人:闫国庆
申请号:CN201821519014.4申请日:20180917
公开号:CN208662888U
公开日:
20190329
专利内容由知识产权出版社提供
摘要:一种旋转电弧传感器,所述旋转电弧传感器包括安装座、驱动器、摆动组件,安装座的中心部设有连接组件,驱动器的上端设置在安装座的外围上,摆动组件设置在驱动器上,连接组件的下端穿过驱动器和摆动组件并与焊枪连接,摆动组件摆动连接组件的下端环形运动。
本实用新型实施例提供的一种旋转电弧传感器采用了由第一偏心圆筒和第二偏心圆筒组成的双偏心设计,实现了焊枪环形运动轨迹的效果。
另外由于第二偏心圆筒的圆心相对于空心转轴的圆心的偏移量可随意调节,针对不同要求的焊接情况,实现了可针对性调节焊枪的环形路径的直径大小的效果。
申请人:闫国庆
地址:063021 河北省唐山市开平区经济技术开发区电瓷道6号
国籍:CN
代理机构:北京知呱呱知识产权代理有限公司
更多信息请下载全文后查看。
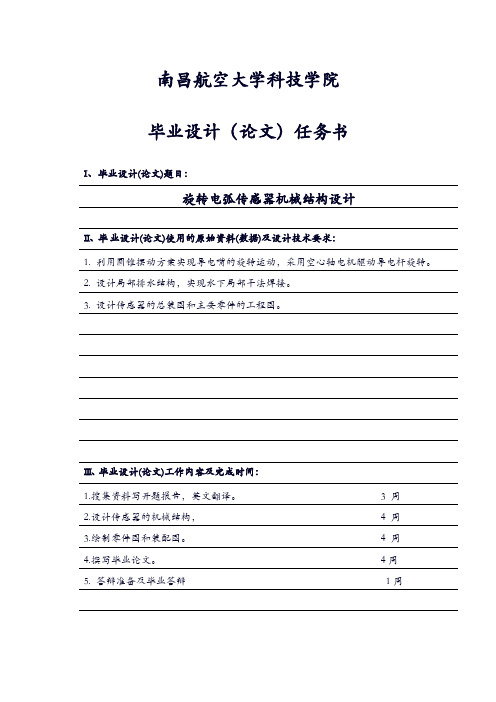
南昌航空大学科技学院毕业设计(论文)任务书I、毕业设计(论文)题目:旋转电弧传感器机械结构设计II、毕业设计(论文)使用的原始资料(数据)及设计技术要求:1. 利用圆锥摆动方案实现导电嘴的旋转运动,采用空心轴电机驱动导电杆旋转。
2. 设计局部排水结构,实现水下局部干法焊接。
3. 设计传感器的总装图和主要零件的工程图。
I I I、毕业设计(论文)工作内容及完成时间:1.搜集资料写开题报告,英文翻译。
3 周2.设计传感器的机械结构, 4 周3.绘制零件图和装配图。
4 周4.撰写毕业论文。
4周5. 答辩准备及毕业答辩1周Ⅳ、主要参考资料:[1].机械设计手册编委会.机械设计手册.北京:机械工业出版社,2004.[2].成大先.机械设计手册(机械传动).北京:化学工业出版社,2004.[3].潘际銮.现代弧焊控制.现代弧焊控制.北京:机械工业出版社,2000.6.[4].曾松盛等.基于电弧传感器的焊缝跟踪技术现状与展望.焊接技术,2008,37(2):1-6.[5].贾剑平,张华,潘际銮.用于弧焊机器人的新型高速旋转电弧传感器的研制[J].南昌大学学报(工科版),2000,22(3):1-4.[6]. Shi, Y.H, Yoo,W.S, Na, S.j. Mathematical modeling of rotational arc sensor in GMAW and its applications to seam tracking and endpoint detection[J]. Science and technology of welding and joining. 2006, 11(6):723~730.学院(系)专业类班学生(签名):日期:自年月日至年月日指导教师(签名):助理指导教师(并指出所负责的部分):机械制造工程系(室)主任(签名):附注:任务书应该附在已完成的毕业设计说明书首页。
知识不仅是指课本的内容,还包括社会经验、文明文化、时代精神等整体要素,才有竞争力,知识是新时代的资本,五六十年代人靠勤劳可以成事;今天的香港要抢知识,要以知识取胜本科毕业论文(设计)机械设计制造及其自动化***20**1*00**专业名称机械设计制造及其自动化申请学士学位所属学科工科指导教师姓名、职称(教授)20 年月日摘要多层热压机是生产胶合板、刨花板、中密度纤维板等人造板的主要设备目前设备制造厂生产的热压机已基本定型为了改进热压机的结构性能和降低制造成本本文主要对五层侧压式热压机结构进行了设计并对热压机的重要部件下托板的结构、强度和刚度进行了设计分析和计算使下托板在结构上更加合理降低了材料和能源消耗提高了生产率设计主要结合现有的设计理念在符合设计要求的前提下设计时热压机的机架整体上主要采用了钢板焊接闭式结构这种结构制造方便无需大型加工设备并且选材主要使用了工字钢、角钢等常用材料使用钢板焊接的加工工艺因而生产工艺性较好一般机械厂均能制造设计中主要使用了CAD、Pro\E等工程制图软件使用了Pro\E软件进行受力分析关键词:侧压式热压机结构设计受力分析AbstractThe multi-layered hot press is the production plywoodthe shaving boardbuilding board and so on density fiberboard major installations. At present the equipment factory production's hot press has finalized basicallyto improve hot press's structure performance and reduce the production costthis article mainly has carried on the design to five side thrust type hot press structureand to hot press's important part under carrier's structurethe intensity and the rigidity has carried on the project analysis and calculates causes the carrier to be more reasonable in the structurereduced the material and the energy consumptionraised the productivity. The design main union existing design ideain conforms to under the design requirements premisein the design in press's rack whole has mainly used the steel plate welding closed type rackthis kind of structure manufacture convenience does not need the large-scale processing equipmentandthe selection has mainly used the I-steelthe angle steel and so on commonly used materialuses processing craft which the steel plate weldsthusthe production technology capability is goodgenerally the machine shop can make. In the design has mainly used CADengineering drawing soft wares Pro \ E and so onused the software Pro \ E to carry on the stress analysis.窗体顶端Key words: lateral pressure typethermal-pressing machinestructural designstress analysis窗体底端目录1.引言 11.1五层侧压式热压机的发展概况及现状11.2热压机的特点21.3热压机的发展带来的机遇和挑战32.热压机的结构设计 42.1框架结构52.2柱塞结构62.3上托板结构 62.4下托板结构72.5平衡机构简要设计82.5.1工作原理82.5.2齿条的设计112.5.3键的选择112.6轴承的选取122.7侧压缸支架结构122.8侧压缸螺栓设计校核133.热压机主要部件的受力分析153.1立柱的设计校核153.2上托板的设计校核153.3下托板的结构设计213.4下横梁底板受力分析24附录26参考文献27致谢281.引言热压机是人造板生产线的主要设备之一热压机的生产能力决定了人造板生产线的产量而热压机的技术水平也在很大程度上决定了人造板产品的质量人造板生产的发展与热压机技术水平的进步息息相关人造板行业的发展对热压机生产提出了更高的要求而更先进水平的热压机的出现则又极大地促进了人造板行业的发展新的人造板国家标准对产品质量提出了更高的要求为保证产品质量就热压机而言一方面:要求工艺上采取最佳热压工艺曲线和工艺参数控制产品质量;另一方面:热压机设备本身在结构和性能上要满足诸如制品的厚度公差、传热的均匀度等要求确保压制品质量热压机的发展促进了人造板工业的繁荣而近年来我国人造板行业的超快速发展也为我国热压机技术的发展提供了广泛的发展空间遗憾的是目前我国还不具备连续压机的生产能力国内需要的连续压机还需要从国外进口这严重影响了我国人造板机械行业整体水平的提高国内的有关单位也在抓紧时间组织必要的人力、物力、技术力量进行连续压机的研制工作相关的产品也有望在未来几年问世本次设计在借鉴以往前人的实际设计经验和部分参数结构的前提下重点对其下托板的结构进行了可行改进设计使用了CAD、Pro/e等工程制图软件对该机器进行结构设计、绘制和分析在指导教师的指导下以及同组同学的共同研讨下基本达到了预期目标1.1五层侧压式热压机的发展概况及现状最早在人造板行业出现的热压机就是多层压机它主要是借鉴并根据纺织工业使用的压机改造而来用于以纸浆来生产最早的纤维板最初的多层热压机尽管还不完善但已经具有现代多层压机的雏形装卸板系统、加热装置、压机闭合开启装置等都为人们所了解这些多层压机的制造商则是来自人造板设备技术比较发达的德国如辛北尔康普公司和贝克一冯赫伦公司前者至今仍然在世界人造板设备供应领域占据重要的地位而后者却已于20世纪80年代退出了市场的竞争行列后来多层压机在刨花板生产中获得了极大的成功并推广开来多层压机的使用在促进刨花板工业的发展的同时推动了整个人造板工业的进步而刨花板行业的发展又为多层热压机的不断改进提供了生产依据最初人造板多层压机的主要制造商主要集中在欧洲包括比松公司、辛北尔康普公司、贝克-冯赫伦公司迪芬巴赫公司和顺智公司等之后随着多层热压机制造技术的推广美洲以及包括中国在内的一些亚洲国家也加入到多层热压机设备供应商之列近年来随着热压机技术的发展欧洲的主要热压机生产厂家已经将主要的生产力转移到连续热压机的生产上而我国的上海人造板机器厂、美国的华盛顿铁工厂则成为除欧洲厂商外的多层热压机市场上较为重要的供应商美国的华盛顿铁工厂一直致力于多层热压机的发展产品的层数、压机幅面也不断加大而我国的上海人造板机器厂则是多层热压机市场的后期之秀依靠国内强大的市场支持目前已向国内外市场提供了多套多层热压机设备为了提高单机生产能力多层热压机采用两种途径提高产能一是增加压机层数二是增大热压板的幅面目前通常使用的热压机层数为10-15层最多可达40层幅面主要有4英寸和8英尺1.2热压机的特点热压机除整个结构布局合理、紧凑、外形美观、精密度高外还具有以下特点:控制系统多样化此热压机的控制系统有光电管、无触点开关和行程开关这些控制电器元件灵敏、耐用而且大部分元件安装在热压机顶部使得热压机结构紧凑、整洁热压机主体部分是由一定厚度的钢板焊接成的框架式不易变形;梯形块上设置倒角便于找正热压机的低压泵、高压泵和电机全部安装在油箱架下边占地面积小该热压机由于装有蓄压器因此可起到缓冲作用以增加热压机的稳定性当液压系统达到一定压力时高、低压泵可自动停止工作;当压力不足时可自动开启高、低压泵补充到规定油压使液压系统总保持在规定的油压范围内1.3热压机的发展带来的机遇和挑战随着房地产业的飞速发展带动了装修业的快速发展从而带动了集成材业的发展集成材保留了天然木材的材质感外表美观材质均匀克服了木材易变形、开裂的缺点利用短小料可获得人造板和实木不能替代的方材板提高了木材的使用价值它是室内装饰、木质地板和中高档家具生产的理想材料集成材的生产主要由拼板机来完成使得拼板机的市场需求量越来越大随着板材生产厂家的需要的不断提高要求拼接出来的板材尽量平整木条之间的不平度较小拼接的整板变形量小没有弯曲、扭曲、翘曲现象为此保证设备上下工作面的平面度、刚性、上下平面的平行度比较关键另外必须改善拼接工艺减少板材拼接受力不均保证热拼板机承载面内受热均匀但我国的拼接设备与德国、意大利等发达国家比还相对比较落后主要表现在设备的自动化程度低配套使用的设备较少还存在很多单机使用现象全自动拼板生产线在国内尚还空白另外我国的拼接板精度不高后序加工量大余料浪费较多随着生产规模的不断扩大多层热压机的层数在不断增多幅面也在不断加大然而多层热压机的缺点也越来越显现出来:1)热压辅助时间长压机有效生产率低使用多层压机需要相应配置附属的装板、卸板系统这无形中增加了热压的辅助时间再加上压机自身所需要的闭合开启时间导致热压周期长生产效率低而且压机的层数越多辅助时间越长辅助系统也越复杂2)随着层数的增多多层压机对系统的同时闭合系统要求更高而且由于在热压过程中各层板坯受压不同造成成品板的产品厚度不均产品稳定性差3)由于装板以及热压板闭合后板坯在未加压的情况下受热使产品产生较厚的预固化层砂光余量大4)热压板在热压过程中直接受湿热蒸汽的作用热压板腐蚀严重影响使用寿命5)受压机开档和热压板的限制多层压机生产的产品规格具有一定的限制不能满足人们对产品多规格的要求尽管多层压机具有以上缺点但是到目前为止多层压机仍然占据热压机市场的大部分市场份额成为人造板生产的主要压机之一改善机架应力状态的措施:(1)在同样重量下减簿板厚增加宽度以提高机架抗弯刚度减少应力(2)避免在机架内侧钻孔、焊接零件以免引起应力集中可将零件布置在立柱的外侧(3)在机架上增加几块补板以提高上、下横梁的抗弯刚度和立柱的刚度(4)减小拐角处的应力集中可以采取圆弧过渡或斜角过渡(5)正确选择焊缝位置机架板一般都是拼焊而成的焊缝强度一般都低于母材而且有焊接应力所以焊缝要选在应力较小的位置而且要沿立柱方向不能沿横梁方向2.热压机的结构设计五层侧压式热压机的整机设计采用了框架式结构整体使用工字钢和钢板焊接而成根据热压板的具体的参数选择成品压板和侧压板整机结构见下图:图2-1 五层侧压式热压机的结构其中热压机的主要技术参数为:上下压力:90吨(将层层热压板向上顶起且保证压机工作时板坯不发生翘曲泄压时靠压机自重下降)侧向压力:10吨(将板坯侧向加紧)热压板尺寸:2550*1370*42mm两热压板之间的间距为100mm详细尺寸结构参考零件图:BYSJ-012.1框架结构最上部为上托板为加强强度上托板与第一个热压板间需焊接厚度为10 mm的钢板每个热压板间距离是100mm侧压缸在同一侧与侧压板连接止推板在另一侧厚度均为10mm热压板通过方形钢管和阶梯形挡块定位为了方便热压机在工作时热压板上升过程中位置的找正将梯形挡块开有45度倒角以便起到引导作用为了使两个侧压缸推力相同以及下托板在上升过程中的平稳使用齿轮齿条机构进行调节第六块热压板直接焊接于下托板上它与下托板之间同样有一厚度为10mm钢板加强其强度柱塞缸与焊接在底座上的法兰通过螺栓连接在一起使用厚度为14mm的钢板四个柱塞缸通过两组齿轮齿条控制同步压力立柱采用H钢型号为28a2.2柱塞结构该结构主要有两部分组成柱塞和柱塞缸两者的结构分别表示如下图示:图2.1柱塞结构柱塞缸主要采用14mm的钢板卷筒焊接而成其结构简单制造方便将该结构安装在下横梁上并通过一块14mm厚的钢板与之焊接为一体钢板上安装法兰以实现工作要求2.3上托板结构为了考虑材料和该结构的受力特点通过对不同结构形式的托板受力分析选择受力最小且受力最为合理的结构其结构设计为两边带有加强肋中部为正方形结构且加强肋在其对角线上结构示意图如下所示:图2.3 上托板结构详细尺寸结构参考零件图BYSJ-022.4下托板结构下托板是该机器的主要受力部件之一为了使受力均匀和节省材料从而降低生产成本在参考了以往的设计经验并通过对不同结构形式的托板进行受力分析最终选择了受力最小且受力最为合理的结构其结构设计为将托板均匀分成四部分每部分的加强肋设计在其对角线上连接柱塞法兰的结构设计在该肋板的几何中心上结构如下图所示:图2.4下托板结构详细尺寸结构参考零件图:BYSJ-032.5平衡机构简要设计2.5.1工作原理由于液压系统在工作时对柱塞缸的压力油供应不均匀而使下托板以及侧压板在工作时不平衡为了使液压缸柱塞将下托板顶起工作时下托板平衡的上升及侧压板工作时平衡的对板坯进行加紧而设计了该平衡机构它主要由齿轮齿条机构来保证将两个相同的齿轮安装在同一根轴上将齿条与下托板相连在侧压板上的平衡机构的结构于此相同在此仅以下托板处的平衡机构的结构为例加以说明具体结构如下图所示:图2.5平衡机构(齿轮齿条机构)参考了机械设计齿轮设计例题分析由于该压机的工作压力最大为90吨所以平衡机构中齿轮转速不高受力不是太大的特点可将齿轮精度等级确定为IT7(GB10095-88)选择其材料为40Cr()硬度为280HBS齿条的材料选为45钢(调质)硬度为240HBS两者材料硬度差为40HBS符合了设计的基本要求现将其主要的设计过程简要叙述如下:1)初选齿轮齿数为=24齿数比u=4;2)主要公式:接触疲劳许用应力分度圆直径:T=Fd/2=11250其中F为液压缸工作参数90t;d为平衡轴直径;有机械设计表10-6查得材料的弹性影响系数=189.8有图10-21d按齿面硬度查齿轮的接触疲劳强度极限=600;由图10-19去接触疲劳寿命系数=0.953)按齿根弯曲强度设计时=0.93mm由图10-20c查得齿轮的弯曲疲劳强度极限=500查图10-18取弯曲疲劳寿命系数=0.85取弯曲疲劳安全系数S=1.4故而 =303.6载荷系数查表10-5查得齿轮的接触疲劳强度决定了承载能它仅与齿轮的直径有关为同时考虑制造及安装方便可将该齿轮的模数适当放大取为m=2.5这样设计的齿轮齿条传动既能满足齿面接触疲劳强度又满足了齿根弯曲疲劳强度并做到了结构紧凑便于生产制造齿轮的主要设计参数:材料:40Cr(调质)精度等级:IT7模数:2.5压力角:20°齿槽宽:3.93 mm齿顶高:2.5 mm齿根高:68.76 mm齿高:5.62 mm齿厚:3.93 mm齿根圆半径:64.38 mm具体尺寸参阅零件图:BYSJ-042.5.2齿条的设计根据齿条的特性及该机构的特点其设计参数有:材料:45钢(调质)精度等级:IT7模数:2.5齿形角:20°齿槽宽:3.93 mm齿顶高:2.5 mm齿根高:3.12 mm齿高:5.62 mm齿厚:3.93 mm齿根圆半径:26.88 mm结构示意图如下:图2.5.2齿条结构参考零件图:BYSJ-052.5.3键的选择根据平衡轴径d=25mm查附表5.20普通平键(GB 1095、1096-2003摘录)选择普通A型平键主要参数:轴深 t=4.0毂深t=3.3根据齿轮宽选键长L=55mm;材料Q275A (GB/1096-2003)2.6轴承的选取根据前文中设计的轴的最小直径d=25mm查机械设计手册选取深沟球轴承代号为:6005 具体参数见下图:其中查机械设计课程设计附录4.2 深沟球轴承(GB/T 276-94摘录)得到主要的参数值有:d=25mmD=47mmB=12mm2.7侧压缸支架结构由于该支架主要对侧压缸起固定作用将其焊接在热压板上工作时随热压板一起上下运动经受力计算该结构主体部分可由14mm钢板焊接;加强肋部分由10mm钢板焊接组成这种结构在受力方面比较理想结构示意图如下:图2.7侧压钢支架三视图具体尺寸参阅零件图:BYSJ-062.8侧压缸螺栓设计校核根据热压机的侧压力10吨以及部件的连接需要初选公称直径为13mm的螺栓为保证其正常工作现对其进行校核受轴向载荷的紧螺栓(静载荷)连接的校核计算结果:工作载荷 Fc = 3.125 kN残余预紧力系数K = 1.6总载荷 F0 = 8.13 kN相对刚度λ = 0.25预紧力 Fp = 7.34 kN螺栓机械性能等级 = 6.8螺栓屈服强度σs = 480 MPa安全系数 Ss1 = 2螺栓许用应力 [σ] = 160.00 MPa选择材料为:45钢螺栓公称直径 Md = M13螺栓小径d1 = 10.106 mm螺栓计算应力σ = 132.1 MPa校核计算结果:σ≤[σ] 满足强度要求受轴向载荷的紧螺栓(动载荷)连接校核计算结果:工作载荷 Fc = 3.125 kN相对刚度λ = 0.25螺栓材料:Q235A螺栓抗拉强度 = 440 MPa螺栓屈服强度 = 240 MPa抗压疲劳强度= 140 MPa尺寸因数ε = 1制造工艺因数= 1受力不均匀因数 = 1缺口应力集中因数= 3.9安全系数= 2螺栓许用应力幅= 17.95 MPa螺栓公称直径= M12螺栓小径= 10.106 mm螺栓计算应力幅= 4.89 MPa校核计算结果:≤满足故选择公称直径为13的螺栓材料为Q235A处理3.热压机主要部件的受力分析3.1立柱的设计校核立柱采用工字钢根据热压机的对称结构立柱仅受拉力作用没有附加的弯矩和扭矩由计算公式:式中: --所选材料的弹性极限这里选取Q235A=210MPaA--工字钢的横截面积S--设计计算安全系数取S=2.F--工字钢受力将数据代入公式得:A=61.4c㎡据此选取型号:热轧工字钢28a(GB706-88)详细尺寸见零件图3.2上托板的设计校核上托板与热压板间附有10mm厚钢板来加强其强度上托板由厚度为14mm高为300mm的钢板焊接而成由于其复杂的交叉结构传统的材料力学分析解决问题的方法十分繁琐此处借用WildfirePro/E 5.0里面的有限元分析工具进行校核计算首先建立三维模型如图:图3.2.1上托板三维模型三维模型建成后进行受力分析的准备工作:先进行模型设置-材料选择-材料的分配-施加位移约束-定义位移约束-定义载荷性质(第一块热压板受到均匀的压力载荷将90t压力均匀分配到热压板上)-建立模型-分析定义-结果定义图3.2.2上托板受力模型系统开始运行随后便可运行出想要得到的结果如图所示:图3.2.2整体受力系统开始运行随后便可运行出想要得到的结果如图所示:图3.2.3运行结果图3.2.5受力结果从图3.2.5中看出该结构最大应力处应力为79.9Mpa该结构用45号钢其抗拉强度为353MP由于90t为该热压机极限压力热压机在工作是几乎不会达到该力此设计结构是偏安全的符合设计要求计算机运算过程如下:------------------------------------------------------------Mechanica Structure Version L-03-38:spg设计研究 "Analysis1" 的摘要Sat Jun 82011 22:46:54运行设置块求解器的内存分配: 128.0并行处理状态当前运行的并行任务限制: 2当前平台的并行任务限制: 64自动检测到的处理器数: 2创建元素前正在检查模型...这些检查考虑到了以下事实:AutoGEM 会自动在具有材料属性的体积块中、具有壳属性的曲面上和具有梁截面属性的曲线上创建元素自动生成元素创建元素后正在检查模型...未在模型中发现错误Mechanica 结构模型汇总主单位制: millimeter Newton Second (mmNs)长度: mm力: N时间: sec温度: C模型类型: 三维点: 2486边: 12685面: 18003弹簧: 0质量: 0梁: 0壳: 0实体: 7803元素: 7803标准设计研究静态分析 "Analysis1":收敛方法: 单通道自适应绘制栅格: 4收敛环日志: (22:47:32)>> 通道 1 <<计算元素方程 (22:47:33)方程总数: 129213最大边阶数: 3解方程 (22:47:40)后处理解 (22:48:04)检查收敛 (22:48:10)资源检查 (22:48:15) 过去的时间 (秒): 81.67CPU 时间 (秒): 79.34内存使用量 (kb): 339829工作目录磁盘使用量 (kb): 495616>> 通道 2 <<计算元素方程 (22:48:16)方程总数: 153891最大边阶数: 6解方程 (22:48:24)后处理解 (22:48:55)检查收敛 (22:49:01)计算位移和应力结果 (22:49:07)RMS 应力误差估计:载荷集应力误差占最大主应力的百分比---------------- ------------ -----------------LoadSet1 8.66e+00 8.2% of 1.06e+02 资源检查 (22:49:27) 过去的时间 (秒): 153.27CPU 时间 (秒): 138.64内存使用量 (kb): 355804工作目录磁盘使用量 (kb): 619520模型的总质量: 1.088271e+00模型的总成本: 0.000000e+00WCS 原点的质量惯性矩:Ixx: 7.44852e+05Ixy: -1.54093e+05 Iyy: 3.17051e+06Ixz: -9.50469e+05 Iyz: -8.27875e+04 Izz: 2.47457e+06 相对于 WCS 原点的主 MMOI 和主轴:最大主应力中间主应力最小主应力 3.18179e+06 2.89414e+06 3.14004e+05WCS X: -3.68288e-02 -4.06791e-01 9.12779e-01WCS Y: 9.97058e-01 4.64826e-02 6.09449e-02WCS Z: -6.72202e-02 9.12338e-01 4.03882e-01 相对于 WCS 原点的质心位置:( 1.27500e+031.11055e+026.85000e+02)质心的质量惯性矩:Ixx: 2.20786e+05Ixy: 9.89530e-10 Iyy: 8.90748e+05Ixz: 2.44472e-09 Iyz: 2.91038e-10 Izz: 6.92026e+05 相对于 COM 的主 MMOI 和主轴:最大主应力中间主应力最小主应力8.90748e+05 6.92026e+05 2.20786e+05 WCS X: 0.00000e+00 0.00000e+00 1.00000e+00 WCS Y: 1.00000e+00 0.00000e+00 0.00000e+00 WCS Z: 0.00000e+00 1.00000e+00 0.00000e+00 约束集: ConstraintSet1: PRT0001载荷集: LoadSet1: PRT0001模型上的合成载荷:在全局 X 方向: -7.205480e-08在全局 Y 方向: 8.803620e+05在全局 Z 方向: 6.876427e-09测量:max_beam_bending: 0.000000e+00max_beam_tensile: 0.000000e+00max_beam_torsion: 0.000000e+00max_beam_total: 0.000000e+00max_disp_mag: 3.651136e-01max_disp_x: -5.989933e-02max_disp_y: 3.651109e-01max_disp_z: 4.774524e-02max_prin_mag*: -1.058371e+02max_rot_mag: 0.000000e+00max_rot_x: 0.000000e+00max_rot_y: 0.000000e+00max_rot_z: 0.000000e+00max_stress_prin*: 8.868574e+01max_stress_vm*: 8.874455e+01max_stress_xx*: 7.934842e+01max_stress_xy*: 4.213737e+01max_stress_xz*: -2.307811e+01max_stress_yy*: -6.292490e+01max_stress_yz*: 2.411726e+01max_stress_zz*: 4.270502e+01min_stress_prin*: -1.058371e+02strain_energy: 2.373799e+04** 警告: 在结果奇点 (或接近位置) 计算由星号 (*) 标记的测量这些测量的值可能不准确在对它们进行解释时必须使用工程评价分析 "Analysis1" 已完成 (22:49:27)内存和磁盘使用情况:机器类型: Windows NT/x86求解器的 RAM 分配 (兆字节): 128.0总过去的时间 (秒): 154.09总 CPU 时间 (秒): 139.13最大内存使用量 (千字节): 355804工作目录磁盘使用量 (千字节): 619520结果目录大小 (kilobytes):71392 .\Analysis1最大数据库工作文件大小 (kilobytes):427008 .\Analysis1.tmp\kblk1.bas158720 .\Analysis1.tmp\kel1.bas33792 .\Analysis1.tmp\oel1.bas运行已完成Sat Jun 82011 22:49:283.3下托板的结构设计结合该部件的结构特点利用三维Pro\E建立立体模型如下图所示:图3.3.1加力后的三维立体模型按照以上方法进行加力、加约束、建立静态分析模型运行结果如图:图3.3.2运行结果图3.3.3运行结果图3.3.4运行结果从图中可以看出该结构受到的最大压应力为70Mpa材料为45号钢(抗压强度为353Mpa)的结构该压机的额定工作压力为90吨在工作压力极少达到所设压力的情况下这种设计是偏于安全的因而符合设计要求3.4下横梁底板受力分析由于该机械工作时推力最大只有90吨而在正常工作情况下是很少达到此压力的所以按照设计要求在比较了几种设计方案后确定了下横梁的结构考虑到其复杂的结构用传统的力学方法很难实现对它的受力分析为了便于受力校核此处使用了Pro/E 里的有限元分析工具对其进行受力分析和校核并根据该机械的工作特点以及其受力特点人为地模拟施加力建立如下三维模型:图3.4.1加力后的三维模型设定相应的约束后运行出结果如图:图3.4.2整体受力运行结果图3.4.3运行结果从图中可以看出该结构所受最大压强为25.7MPa对45号钢(抗压强度为353Mpa)来说是非常安全综上所述该设计在结构和受力方面都符合设计要求附录【1】型钢结构表:【2】调质:淬火后又高温回火的双重热处理其目的是:提高了强度又保持了材料的韧性还改善了材料的切削加工性【3】回火:淬硬后加热到AC1以下的某一温度保温一定时间然后冷却到室温的热处理工艺其目的是:(a)消除工件淬火时产生的残留应力防止变形和开裂;(b)调整工件的硬度、强度、塑性和韧性达到使用性能要求;(c)稳定组织与尺寸保证精度;(d)改善和提高加工性能【4】附零件图:轴承座图号BYSJ-07参考文献[1] 胡广斌.人造板热压机的发展历程.中图分类号:TS653 文献标识码:A 文章编号1001-5299(2005)01-0050 -04.[2] 秦少芳.框架热压机主要受力件设计的探讨.木材工业1996(3):16一20.[3] 多层热压机设计.沈阳重机厂吴新泉.中国学术期刊电子出版设1994-2001.[4] 袁东.世界人造板机械发展现状与趋势[J].世界林业研究2007 C 20 ) 60-67.[5] 李绍昆姜仁龙.中密度纤维板多层热压机的热压过程分析[[J].中国人造板 2008 . 6:20-23.[6] 种奇军熊键国种凤军.人造板热压机框架、油缸等的简易设计计算[[J].中国人造板2006 C 1)31-33.[7] 李沿海.日本KU一IHPD 1515型热压机设计特点[[J].林业机械与木工设备 2001 1: 33-34.[8] 路健张伟.国际人造板机械发展状况与技术特点.木材加工机械2003 (5) : 1-720.[9] 川哀华柯尊忠郭世英.热压机框板结构优化设计[[J].合肥工业大学学报怕然料学版1990 13(222-27.[10] 林秀安.大型多向模锻液压机关键技术的试验研究.中国机械工程学会第二次锻压学术年会论文1979.[11] 张剑峰杨一匕.我国人造板机械工业发展现状、存在问题及展望[J]2000 C 4 ) 27-32.[10] 苏阳崔学红邵林波.热压机框架板的受礼分析及其改进[[J].昆明冶金高等专科学校学报2003 19(2):18-21.[11] 穆国君.密排缸压机框式机架强度的简单计算[[J].木材加工机械 1990 } (4) : 5-8.[12] 东北重型机械学院.650吨板框式结构模锻液压机一试验研究.机械工业部8022235科研课题论文1981.致谢。
基于旋转电弧的机器人角焊缝跟踪建模及仿真李毅;陈佳洋;胡圣贤;邓鑫;张枫涛;谢晓雪【摘要】通过对现有旋转电弧传感器采集的焊缝偏差信息和六自由度焊接机器人运动学模型进行研究,结合曲线角焊缝的特点,推导出纠正焊缝偏差后的焊接机器人工具坐标系相对于原工具坐标系的变换矩阵.在此基础上,结合焊接机器人的运动学反解,建立了曲线角焊缝跟踪及焊枪姿态调整模型.输入给定左右偏差及高低偏差信号,利用MATLAB对模型进行仿真验证,结果证明了该模型的有效性与正确性,从而为旋转电弧传感应用于焊接机器人及设计其焊缝跟踪系统提供了理论参考.%The six degrees welding robot kinematics model,rotating arc sensor welding seam deviation information collection and curve characteristics of fillet weld were studied,the robot transformation matrix after rectifying flange coordinate system relative to the base coordinate system was deduced,and the robot reverse kinematics was calculated.Then,the complex fillet seam tracking and posture welding torch adjustment models were established.The given height and lateral deviation signals were input into the MATLAB platform,and the simulation tests of robot welding seam tracking model were carried out.The simulation results prove that this model is effective and accurate.This paper provides theoretical references for using the rotating arc sensors in the welding robots.The research fruits provide the theory basis for seam tracking system designs.【期刊名称】《中国机械工程》【年(卷),期】2018(029)003【总页数】5页(P348-352)【关键词】旋转电弧传感器;焊接机器人;角焊缝跟踪;建模与仿真【作者】李毅;陈佳洋;胡圣贤;邓鑫;张枫涛;谢晓雪【作者单位】湘潭大学机械工程学院,湘潭,411105;湘潭大学焊接机器人及应用技术湖南省重点实验室,湘潭,411105;湘潭大学复杂轨迹加工工艺及装备教育部工程研究中心,湘潭,411105;湘潭大学机械工程学院,湘潭,411105;湘潭大学机械工程学院,湘潭,411105;湘潭大学机械工程学院,湘潭,411105;湘潭大学机械工程学院,湘潭,411105;湘潭大学机械工程学院,湘潭,411105【正文语种】中文【中图分类】TP242.20 引言旋转电弧传感器具有实时性强、灵敏度高等优点[1],而焊接机器人灵活性高,可自由调整焊枪处于任意姿态[2],因此,将旋转电弧传感器应用于焊接机器人,建立焊缝跟踪模型并进行仿真分析,具有重要的工程实用价值。
旋转电弧传感器结构优化设计
叶艳辉;张华;覃庆文;高延峰
【期刊名称】《现代制造工程》
【年(卷),期】2014(000)011
【摘要】针对现有旋转电弧传感器转速高、振动大的缺点,运用三维软件和ADAMS软件建立圆锥摆式高速旋转电弧传感器虚拟样机,并对传感器进行振动分析。
通过增加平衡结构来减小传感器的振动,并在ADAMS中对平衡结构参数进行优化设计。
优化结果表明,优化后传感器的振幅是优化前的12.9%,有效地降低了旋转电弧传感器的振动,提高了焊接成形质量。
【总页数】4页(P14-17)
【作者】叶艳辉;张华;覃庆文;高延峰
【作者单位】南昌大学机电工程学院,南昌330031;南昌大学机电工程学院,南昌330031;南昌大学机电工程学院,南昌330031;南昌大学机电工程学院,南昌330031
【正文语种】中文
【中图分类】TH122
【相关文献】
1.基于旋转电弧传感器的水下焊接高压电弧仿真计算 [J], 李志刚;张华;贾剑平
2.气幕式旋转电弧传感器结构设计 [J], 陈海军;张华
3.基于旋转电弧传感器的水下电弧焊信号处理 [J], 杜健辉;石永华;王国荣;黄国兴
4.TIG焊旋转电弧传感器结构设计 [J], 贾剑平;李红利;孙鹏
5.旋转电弧传感器的结构优化 [J], 黄凌翔;张华;马国红;李晓波;王红波
因版权原因,仅展示原文概要,查看原文内容请购买。