乐高齿轮教学 PPT课件
- 格式:ppt
- 大小:2.66 MB
- 文档页数:22





乐高机器人---运动篇8.1简介灵活的思维造就出了许许多多的机器人,运动使创造物获得了生命,带来无限的乐趣,同时也对自己的创造力进行了挑战。
大多数运动机器人都属于轮子型与腿型机器人。
虽然轮子在光滑的表面很有效,但是在凹凸不平的地面上运动,腿提供了更有力的方式。
底盘结构是为了突出显示它们的传动系统和连接情况,因此,在实际搭建中还需对此结构加固。
8.2简单的差动装置机器人具有很多优点(尤其具有简单性),至少在乐高的可移动机器人中常用到此结构。
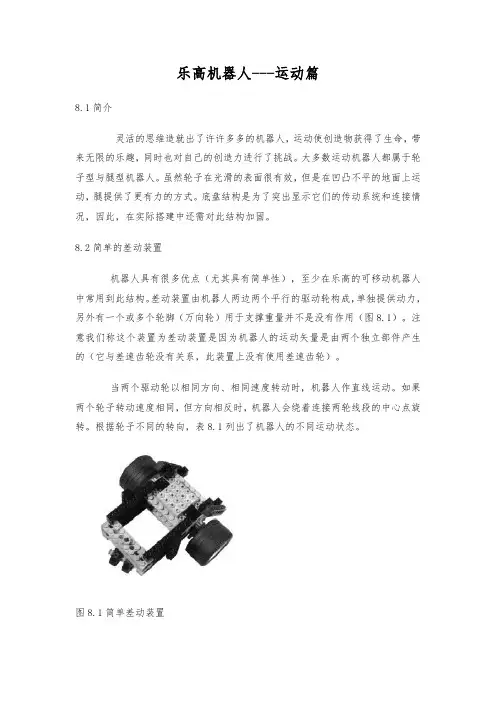
差动装置由机器人两边两个平行的驱动轮构成,单独提供动力,另外有一个或多个轮脚(万向轮)用于支撑重量并不是没有作用(图8.1)。
注意我们称这个装置为差动装置是因为机器人的运动矢量是由两个独立部件产生的(它与差速齿轮没有关系,此装置上没有使用差速齿轮)。
当两个驱动轮以相同方向、相同速度转动时,机器人作直线运动。
如果两个轮子转动速度相同,但方向相反时,机器人会绕着连接两轮线段的中心点旋转。
根据轮子不同的转向,表8.1列出了机器人的不同运动状态。
图8.1简单差动装置表8.1 轮子不同的旋转方向产生不同的运动状态组合不同方向和速度,机器人可以做任意半径的旋转。
因为它的灵活性、及原地旋转的功能成为许多工程的教学器具。
另外,由于它很容易实现,所以乐高有一半以上的运动机器人属于此结构。
假如你想跟踪机器人的位置,那差动装置又是比较好的选择,仅仅需要简单的数学知识。
这种结构只有一种弊端:它不能保证机器人笔直的运动,因为两个马达的功效总有差别,一个轮子会比另外一个轮子转动的快一点,因此使得机器人略微偏左或偏右。
在某些应用中这中情况不会有问题,可以通过编程来避免,比如使机器人沿线走或在迷宫中寻找路线行走,但是让机器人在空地上走直线恐怕不行。
8.2.1直线运动使用简单差动装置有许多方法可以保持直线行走,最简便的方式是选择两个速度相近的马达。
如果你有两个以上的马达,尽量找两个速度最匹配的马达,这种方式也不能确保机器人走直线,但至少能减小走偏的情况。