陆地钻机桅杆式钻杆自动排放系统研究
- 格式:pdf
- 大小:165.16 KB
- 文档页数:2
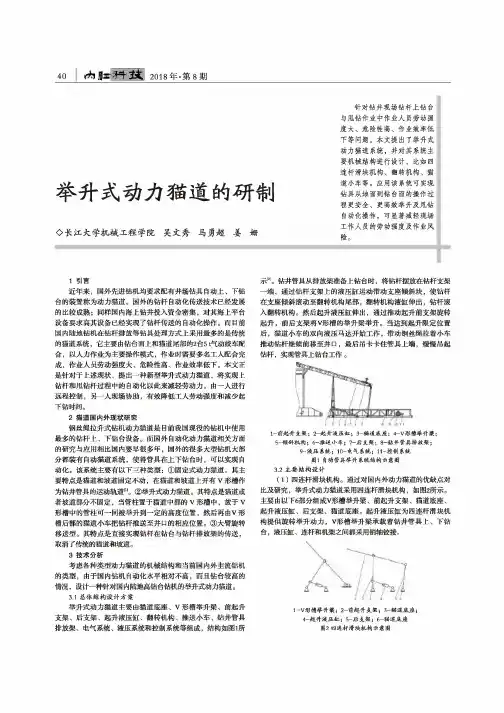
40科技2018年.第8期举升式动力猫道的研制◊长江大学机械工程学院吴文秀马勇超姜姗针对钻井现场钻杆上钻台 与甩钻作业中作业人员劳动强 度大、危险性高、作业效率低 下等问题,本文提出了举升式 动力猫道系统,并对其系统主 要机械结构进行设计,比如四 连杆滑块机构、翻转机构、猶 道小车等。
应用该系统可实现钻具从地面到钻台面的操作过程更安全、更高效举升及甩钻自动化操作,可显著减轻现场工作人员的劳动强度及作业风 险。
1引言近年来,国外先进钻机均要求配有井场钻具自动上、下钻台的装置称为动力猫道。
国外的钻杆自动化传送技术已经发展 的比较成熟;同样国内海上钻井投入资金密集,对其海上平台 设备要求高其设备已经实现了钻杆传送的自动化操作。
而目前 国内陆地钻机在钻杆排放等钻具处理方式上采用最多的是传统 的猫道系统,它主要由钻台面上和猫道尾部的2台5汽动绞车配 合,以人力作业为主要操作模式,作业时需要多名工人配合完 成,作业人员劳动强度大、危险性高、作业效率低下。
本文正 是针对于上述现状,提出一种新型举升式动力猫道,将实现上 钻杆和甩钻杆过程中的自动化以此来减轻劳动力。
由一人进行 远程控制,另一人现场协助,有效降低工人劳动强度和减少起 下钻时间。
2猫道国内外现状研究钢丝绳拉升式钻机动力猫道是目前我国现役的钻机中使用 最多的钻杆上、下钻台设备。
而国外自动化动力猫道相关方面 的研究与应用相比国内要早很多年,国外的很多大型钻机大部 分都装有自动猫道系统,使得管具在上下钻台时,可以实现自 动化。
该系统主要有以下三种类型:①固定式动力猫道。
其主 要特点是猫道和坡道固定不动,在猫道和坡道上开有V形槽作 为钻井管具的运动轨道。
②#升式动力猫道。
其特点是猫道或 者坡道部分不固定,当管柱置于猫道中部的V形槽中,放于V 形槽中的管柱可一同被举升到一定的高度位置,然后再由V形 槽后部的猫道小车把钻杆推送至井口的相应位置。
③大臂旋转移送型。


毕业论文(设计)题目学院学院专业学生姓名学号年级级指导教师教务处制表二〇一三年三月二十日机械自动化毕业论文选题本团队专业从事论文写作与论文发表服务,擅长案例分析、仿真编程、数据统计、图表绘制以及相关理论分析等。
机械自动化毕业论文选题:基于面向服务构架的机械自动化处理系统的设计与实现BP网络在机械自动化加工参数自动选择中的应用研究机械自动化控制系统中RS485—光-CAN通信模块设计与开发集装箱自动化堆场物流系统仿真与分析感应加热磁热耦合场数值模拟及温度回归分析HEV再生制动系统与ABS协调控制建模与仿真的研究舞台空间姿态控制系统的研究基于激光导航的果园拖拉机自动控制系统研究中国传统家具镶嵌艺术及现代化技术的研究新型修井作业油管移运自动化系统设计与仿真人工清扫街道的环卫工人作业疲劳研究D公司变频器在中国纺织业业务拓展策略研究耳机插头注塑自动化设备的开发新型修井作业起升系统设计及仿真研究智能化工程机械机群状态监测与故障诊断系统研究盘形滚刀破岩过程有限元数值模拟乳化液泵站变频恒压控制系统的研究陆地钻机立柱式钻杆排放系统设计ZJ50D型陆地钻机钻杆自动排放系统的方案设计研究碳纳米管改性聚甲醛的研究弧面分度凸轮机构参数优化设计和仿真远程控制井口作业装置的设计与仿真点焊构件焊点布置的优化设计镍氢动力电池正极极板生产线控制系统研究与开发我国煤矿安全管理体制研究基于Plug—in的苗木嫁接机切削机构的研究自动行走机器人视觉导航系统仿真及行走控制系统设计浪形轴承保持架正反面自动分离技术研究利用测试反拨效用提高独立学院英语教学质量的模式研究电机风机控制器测试系统温室穴盘苗移栽机的设计及试验研究基于多传感器分布式信息融合的AGV定位方法研究铝合金轮毂局部难加工表面砂带抛磨方法研究交流液压系统管道特性及流场分析交际性听力测试在高职高专英语听力测试中的应用丝网凸焊质量实时监测分析系统的研制基于全矢谱的旋转机械轴振与瓦振关系研究基于三菱FX2N的自动弯管机控制系统的设计与实现永磁同步电动机伺服驱动器产品化设计摆动式机械手机构运动与PLC控制的研究基于WCDMA的视频监控系统的设计与实现基于EDEM的垂直螺旋输送机性能参数仿真研究土壤快速采集装置研究棉花打顶机打顶高度自动控制系统基于机器视觉的番茄图像匹配算法研究玻璃钢缠绕机控制系统设计基于现场总线的多梳经编机集成控制系统研究干壳莲子螺杆分级机设计与主要参数试验研究基于图像处理的水稻成熟期密度检测焦炉机械设备控制系统的设计与研究。

钻修井作业中管柱处理系统的技术发展探讨发布时间:2021-10-29T15:00:03.614Z 来源:《论证与研究》2021年9期作者:李泽林[导读] 摘要:钻修井管柱处理是修行作业中重要的工艺环节之一,是施工技术及施工风险最为密集的施工环节,钻井修井机构操作的自动化控制一直是钻井修井工艺技术的发展的热门方向。
要想实现管柱排放的自动化,需要对实现管柱处理系统的自动化,课题基于我国管柱处理系统的发展现状结合国内外先进的处理技术和经验,探寻符合我国钻井工程现状的管柱处理技术发展方向。
钻修井作业中管柱处理系统的技术发展探讨李泽林(中国石油长城钻探工程有限公司 北京 100101)摘要:钻修井管柱处理是修行作业中重要的工艺环节之一,是施工技术及施工风险最为密集的施工环节,钻井修井机构操作的自动化控制一直是钻井修井工艺技术的发展的热门方向。
要想实现管柱排放的自动化,需要对实现管柱处理系统的自动化,课题基于我国管柱处理系统的发展现状结合国内外先进的处理技术和经验,探寻符合我国钻井工程现状的管柱处理技术发展方向。
关键词:钻修井作业;关键技术;发展建议钻修井作业过程汇中设计大量的钻杆、套管以及油管的起出及下方工作。
其中在下钻过程中需要进行多次钻柱的排放作业,劳动强度极高,存在较大的人员施工安全风险。
钻井系统自动化处理系统可以实现施工中管具在钻井或操平台上的管柱自动移送以及排放。
从而减少上述施工环节中人工参与的比例,最大限度降低对人力的依赖性,从而从根本上降低了人力操作中各种风险的产生,实现了安全、健康、高效率的钻井1管柱处理系统的发展历程及基本类型管柱处理系统最早在我国海上油田中广泛应用,与60年代初期逐步投入商业使用,并与80年代初步发展成熟。
在近60年的不断发展中,从最初的管柱单一处理系统,逐步发展成多种不同类型、多种用途的多功能管柱处理系统,具有高效、高自动化的特点。
1.1动力猫移送型动力猫移送型是在钻井猫道中安装对应的自动化装置以及自动化控制设备实现管柱上下台阶的自动化控制措施,这套装置也成为自动控制猫道输送装置。

二层台安全自动取排管系统优化升级技术研究是国外在21世纪发展起来的一项前沿钻井技术,是21世纪钻井技术的主要发展方向。
二层台安全自动取排管系统优化升级技术研究就是指通过自动化装备,对二层台管柱进行取、排作业,使用计算机获取数据并进行解释和发出指令,最后由自动化设备去执行,实现二层台无人操作的自动化控制系统。
1 技术目标针对现有二层台取排管技术存在的问题,研制一套稳定、可靠的钻机二层台管柱安全自动取排管系统,最大限度地保障现场二层台管柱取排管作业的安全、可靠,减轻井架工的劳动强度,实现最终的本质安全。
基本参数二层台工作高度(二层台面至钻台面) 24.5m、25.5m、26.5m;二层台容量:5 1/2 钻杆:408 柱,11628(28.5m/柱)9 1/2 钻铤:14 柱,399m(28.5m/柱)PRS工作角度: ±90°;PRS最大处理半径:3100mm;PRS处理管具规格: 钻杆:31/2’-51/2’ 钻铤:≤9 1/2'额定系统压力:18MPa;额定流量:30L/min气控系统压力: 0.7MPa 总重:11.5t2 技术内容(1)全自动钻机二层台管柱安全取排管系统设计与研究;全自动排管系统主要配备在较新含有顶驱的钻机上,可实现二层台无人工取排管作业,设备单元涉及顶驱、液压吊卡、二层台管柱自动取排管装置及钻台机械手等单元组件。
司钻在司钻房内通过远程控制系统即可完成取排管作业。
二层台管具排放系统,替代原有二层台装置,对二层台作业进行自动化控制和处理。
(2)半自动钻机二层台管柱安全取排管系统设计与研究;半自动排管系统主要配备在未有顶驱的钻机上,涉及常规吊卡、二层台管柱自动取排管装置及钻台机械手等单元组件,在作业施工时需由井架工开启吊卡,再通过安全取排管装置进行排管作业。
井架工开启吊卡后,司钻通过远程操作系统完成作业,无需人工排放管柱。
本地与远程控制与全自动排管系统相同。
2) 可平滑无级调节泵速,在油井供液不足时能保持井下液位基本不变。
一方面避免了电潜泵空抽,提高了泵效;另一方面提高了潜油电机的负载率,避免了抽油机 大马拉小车 的状况,使电潜泵功效和功率因数都得到提高,大幅度降低了电能消耗,增产节能效果显著。
3) 提高了电潜泵的网侧功率因数。
4) 负载动态跟踪优化控制和线路压降自动补偿功能的节电效果显著。
针对电潜泵的负载特点和特殊工况,通过实时检测电机的负载状况和特定的动态跟踪调压优化控制算法,改善了电机的工作状态;自动调节线路补偿电压,提高了工作效率,实现了抽油机节能的动态跟踪控制。
5) 变频/工频运行方式的自动和手动切换控制功能方便、灵活。
6) 电潜泵在井下供液严重不足导致电机过轻载运行和因泥砂、石块阻塞油泵或其他机械故障导致过载自动停机时,本项目具有欠电流保护和过电流保护功能。
移相组合式多电平变频调速装置与电潜泵控制的结合不仅可以提高油井采收率和增产节能,而且可以大幅度降低维修和运行费用,节约采油成本,保证电潜泵的可靠运行。
参考文献:[1] 张全胜.潜油电泵系统的故障树分析[J].石油矿场机械,2008,37(4):47 50.[2] 石在虹,李 波,崔 斌,等.电潜泵井生产动态分析[J].石油学报,2003,24(1):100 104.[3] 管虹翔,李成见,李 萍,等.变频条件下电潜泵井的产量调节能力研究[J].石油机械,2008,36(2):59 62.[4] 马宝祥,刘继成,赵丽丽,等.采用评点法评定潜油电泵系统的风险等级[J].石油矿场机械,2007,36(5):104 106.[5] 徐甫荣.中高压变频器的分类和比较[J].电工技术,2004(9):1 4.收稿日期:2008 12 01作者简介:尹晓丽(1985 ),女,山东临沂人,硕士研究生,现从事石油钻采机械和海洋石油装备的研发工作,E mail:yinx l.happy @163.co m 。
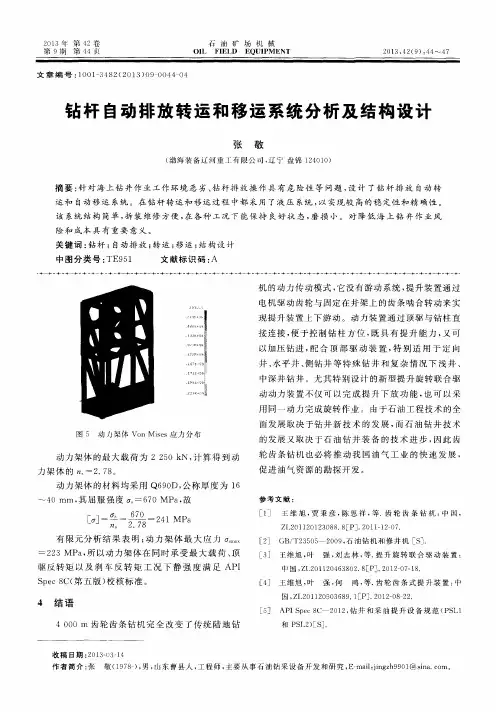
陆地钻机平台钻杆柱运移方案综述
张飞宇;王清岩;沙永柏;万晓鹏
【期刊名称】《机械制造》
【年(卷),期】2012(050)012
【摘要】自动钻杆处理装置用自动化的机械装备代替了人工操作,实现了人与钻杆的分离和钻杆的自动化排放.自动钻杆处理装置降低了井台操作风险,减少了起下钻时间,使得钻进效率大幅提升,目前在海洋钻井平台已广泛应用.介绍了国内外现有的陆地钻井平台自动排管系统,分析其结构优缺点,提出了SPKZ-I-02型排管系统的设计方案.
【总页数】3页(P74-76)
【作者】张飞宇;王清岩;沙永柏;万晓鹏
【作者单位】吉林大学建设工程学院长春130000;吉林大学建设工程学院长春130000;吉林大学机械科学与工程学院长春130000;吉林大学机械科学与工程学院长春130000
【正文语种】中文
【中图分类】TH165+.1;TE928
【相关文献】
1.小型陆地钻机新型钻具排放机械臂设计方案 [J], 马小石;张成功
2.半潜式生产平台陆地移运方案及浮托流程分析 [J], 张伟;袁洪涛;杨勇;王钰涵
3.陆地钻机钻具自动运移装置研制 [J], 牛文杰
4.小车装置减少了陆地钻机的移运时间 [J],
5.长庆苏里格油田区块在役钻机移运方案设计 [J], 张赢斌; 侯敏; 黄许澎; 付俊; 李慧莹; 唐文
因版权原因,仅展示原文概要,查看原文内容请购买。