河海大学考研机械设计课件文档
- 格式:doc
- 大小:881.50 KB
- 文档页数:21
目 录2015年河海大学机械设计考研真题(回忆版)(部分)2014年河海大学机械设计考研真题(回忆版)2013年河海大学815机械设计考研真题(回忆版)2012年河海大学机械设计考研真题(回忆版)2011年河海大学机械设计考研真题(回忆版)2010年河海大学815机械设计考研样卷2009年河海大学机械设计考研真题2006年河海大学439机械设计考研真题2006年河海大学415机械原理考研真题2005年河海大学439机械设计考研真题2004年河海大学机械设计考研真题2015年河海大学机械设计考研真题(回忆版)(部分)说明:此试题内容来源于网络,只含部分试题,特此说明!题目只是回忆,为了帮助更多奋斗的小伙伴!第1题:闭式齿轮传动失效形式,设计原则。
第2题:蜗杆传动为什么进行热平衡计算,及措施。
第3题:带传动为什么会打滑,及打滑的影响。
第4题:提高螺纹连接强度的措施。
2014年河海大学机械设计考研真题(回忆版)说明:此试题内容来源于网络!一、选择题(20个20分)基础知识二、填空题(20个20分)基础知识选择填空考的很细,课本一定要看仔细。
三、简答题(4*10=40)1.为增加蜗杆减速器输出轴的转速,决定用双头蜗杆代替原来的单头蜗杆,问原来的涡轮是否可以继续使用?为什么?2.齿宽系数的选择原则。
3.滚动轴承内圈固定,画出内圈外圈受力图,判断哪个部件最容易损坏(有点难度)。
4.不记得了,但这道题很简单。
四、分析题(3*10=30)1.关于轴的,要用到轴的扭转强度计算公式(370页那个公式),用它来分析,给出两根轴传递的功率以及直径的关系,比较哪根轴容易坏。
2.涡杆涡轮齿轮受力旋向判断,个人感觉这道题出的比较模糊,不是很好做。
3.有一刚性凸缘联轴器,用材料为Q235的普通螺栓连接以传递转矩T,现预提高其传递的转矩,但限于结构不能增加螺栓的直径和数目,试提出三种能提高该联轴器传递的转矩的方法。
五、计算题(2*20=40)1.螺纹连接那几个公式的运用(总拉力,预紧力,残余的变化,求最大最小应力,应力幅,平均应力),要画出受力变形图。
机械工程领域
(430102)
一、领域范围
机械工程口径宽、覆盖面广的工程领域。
它涵盖机械电子工程、机械设计及理论、机械制造及自动化、车辆工程、材料加工工程领域。
机械电子工程学科创建于1986年,1990 年获得机械电子工程学科的硕士学位授予权,1994年获得机械设计及理论学科硕士学位授予权,2003年获得机械制造及自动化学科硕士学位授予权, 2005年获得机械工程一级学科硕士学位授予权。
二、培养目标
培养掌握机械工程领域坚实的基础理论和宽广的专门知识及管理知识,掌握解决工程问题的先进技术方法和现代技术手段,具有独立担负工程技术或工程管理工作的能力。
特别重视综合素质、创新能力和适应能力的培养,具体要求为:
1.拥护党的基本路线和方针政策,热爱祖国,遵纪守法,具有良好的职业道德和敬业精神,具有科学严谨和求真务实的学习态度和工作作风,身心健康。
2.侧重于机械工程应用,主要为工矿企业和工程建设、管理部门,特别是国有大中型企业培养应用型、复合型高层次工程技术和工程管理人才,为高等院校培养具有较强工程实践经验和扎实理论基础的双师型教师。
3、掌握一门外国语,能比较熟练地阅读本专业的外文资料,并具有一定写作能力。
三、学分要求
总学分不少于30学分,其中学位课程20学分(公共课程6学分,学科基础课4学分,专业基础课4学分,专业课6学分),非学位必修课程10学分,实践环节6学分。
四、课程设置。
机械设计基础(原理部分)绪论一、填空题:1、机器具有的共同特征是:它是()的组合体;组合体中(),各单元之间具有()运动;能完成()或实现()的转换。
2、()是机器和机构的总称。
3、构件是机构中的()。
4、零件是机器中的()。
5、机器与机构的区别在于:机器是利用()做有用功或实现()的转换;机构则用于传递或转变()的形式。
二、判断题:1、机构就是具有相对运动的构件的组合。
()2、构件是加工制造的单元,零件是运动的单元。
()3、构件是一个具有确定运动的整体,它可以是单一整体,也可以是几个相互之间没有相对运动的物体组合而成的刚性体。
()三、选择题:1、我们把各部分之间具有确定的相对运动的构件组合称为()。
(1)机器(2)机构(3)机械(4)机床2、下列机械中属于机构的是()。
(1)纺织机(2)拖拉机(3)雷达(4)发电机第一章平面机构的自由度和速度分析一、填空题:1、运动副是两构件()组成的()的联接,它限制了两构件之间的某些(),而又允许有另一些()。
按两构件的接触形式的不同,运动副可分为()和()两大类。
2、车轮在轨道上转动,车轮与轨道间构成()副。
3、具有确定运动的机构,其主动件数目应()机构自由度数目。
4、当m各构件在同一处组成转动副时,其转动副数目为()个。
二、判断题:1、两构件通过点或线接触组成的运动副为低副。
()2、常见的平面运动副有转动副、移动副和高副。
()3、两构件用平面高副联接时相对约束为1。
()4、两构件用平面低副联接时相对自由度为1。
()5、由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束。
()6、在一个确定运动的机构中主动件只能有1个。
()三、选择题:1、当一个平面机构的原动件数目小于此机构自由度数时,则此机构( )。
(1)具有确定的相对运动(2)只能作有限的相对运动(3)运动不能确定(4)不能运动四、问答题:1、何谓运动副及运动副元素?2、机构具有确定运动的条件是什么?五、机构自由度的计算第二章平面连杆机构一、填空题:1、平面连杆机构是由若干个刚性件用( )副或( )副联接而成,运动副均为( )接触,压强较小,又称为( )机构,与点、线接触的高副机构相比能由于( )载和( )载荷。
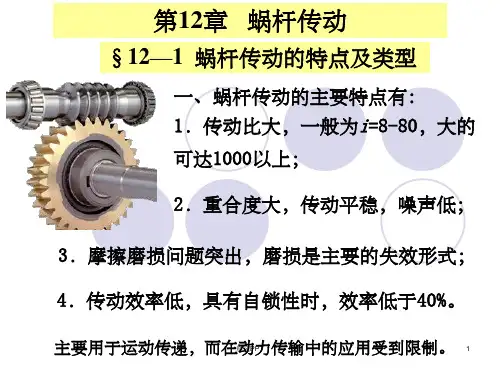
8.1.2 蜗杆传动的类型
按蜗杆形状的不同可分:
1.圆柱蜗杆传动-普通圆柱蜗杆(阿基米德蜗杆、渐开线蜗杆、法向直廓蜗杆、锥面包络蜗杆)和圆弧蜗杆
2.环面蜗杆传动
3.锥蜗杆传动
8.1.3 蜗杆传动的特点
传动比大,结构紧凑
传动平稳,无噪声
具有自锁性
传动效率较低,磨损较严重
蜗杆轴向力较大,致使轴承摩擦损失较大。
8.1.4 蜗杆传动的应用
由于蜗杆蜗轮传动具有以上特点,故常用于两轴交错、传动比较大、传递功
率不太大或间歇工作的场合。
当要求传递较大功率时,为提高传动效率,常取
z
=2-4。
此外,由于当γ1较小时传动具有自锁性,故常用在卷扬机等起重机械1
中,起安全保护作用。
它还广泛应用在机床、汽车、仪器、冶金机械及其它机器
或设备中;
蜗杆传动由蜗杆相对于蜗轮的位置不同分为上置蜗杆和下置蜗杆传动。
8.2.1 普通圆柱蜗杆传动的基本参数及其选择
1.基本参数:
(1)模数m和压力角α:
在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即
m
=m t2=mαa1=αt2
a1
蜗杆轴向压力角与法向压力角的关系为:
tgα
=tgαn/cosγ
a
式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q
为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗
(4)导程角γ
蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p
=z1p a由下图可知:
z
tanγ= p
/πd1=z1p a/πd1=z1m/d1=z1/q
z
导程角γ的范围为3.5°一33°。
导程角的大小与效率有关。
导程角大时,效率高,通常γ=15°-30°。
并多采用多头蜗杆。
但导程角过大,蜗杆车削困难。
导程角小时,效率低,但可以自锁,通常γ=3.5°一4.5°
(5)传动比I
传动比i=n主动1/n从动2
蜗杆为主动的减速运动中
i=n
/n2=z2/z1 =u
1
式中:n1 -蜗杆转速;n2-蜗轮转速。
减速运动的动力蜗杆传动,通常取5≤u≤70,优先采用15≤u≤50;增速传动5≤u≤15。
普通圆柱蜗杆基本尺寸和参数及其与蜗轮参数的匹配表。
8.2.2 蜗杆传动变位的特点
蜗杆传动变位
变位蜗杆传动根据使用场合的不同,可在下述两种变位方式中选取一种。
1)变位前后,蜗轮的齿数不变(z2 '=z2),蜗杆传动的中心距改变(a '≠a),如图9-8a、c所示,其中心距的计算式如下:
a '=a+x
2m=(d
1
+d2+2x2m)/2
2)变位前后,蜗杆传动的中心距不变(a'=a),蜗轮齿数发生变化(z2'≠z2),如图9-8d、e所示,z2' 计算如下:
因a'=a则z2' =z2-2x2
蜗杆传动变位:
8.2.3 普通圆柱蜗杆传动的几何尺寸计算
普通圆柱蜗杆传动基本几何尺寸计算关系式:
名称代号计算关系式说明
中心距 a a=(d
1+d
2
+2x
2
m)/2 按规定选取
蜗杆头数z
1
按规定选取
蜗轮齿数z
2
按传动比确定
齿形角 a a
a =20。
或a
n
=20。
按蜗杆类型确定
模数m m=m
a =m
n
/cosr 按规定选取
传动比i i=n
1/n
2
蜗杆为主动,按规
定选取
齿数比u u=Z
2/Z
1
当蜗杆主动时,i=u
蜗轮变位系数x
2x
2
=a/m-(d
1
+d
2
)/2m
蜗杆直径系数q q=d
1
/m
蜗杆轴向齿距p
a p
a
=πm
蜗杆导程p
z p
z
=πmz
1
K β—齿向载荷分布系数
K v —动载系数。
使 用 系 数(K A )
动力机
工 作 机
均 匀
中等冲击 严重冲击
电动机,汽轮机 0.8-1.25 0.9-1.5
1-1.75
多缸内燃机 0.9-1.50 1-1.75 1.25-2
单缸内燃机
1-1.75 1.25-2 1.5-2.25
注:小值用于每日偶而工作,大值用于长期连续工作。
应力分析
由于蜗杆传动中,蜗轮比蜗杆的强度低。
因此,在应力分析中只要了解蜗轮的情况就可以了。
普通圆柱蜗杆传动在中间平面相当于齿条和齿轮的传动,故可以仿照圆柱斜齿轮推倒蜗轮的应力计算公式。
蜗轮齿面接触应力
蜗轮齿面接触应力仍来源于赫兹公式。
接触应力
Mpa
式中:
K-载荷系数;
F
-啮合面的法向载荷,N;
n
Z
-材料的弹性影响系数,,对于青铜或铸铁蜗轮与钢蜗杆配对
E
时,取Z E=160();
ρ∑-综合曲率;
L
-接触线总长,mm。
将上式换算成蜗轮转矩T2和中心距a的关系得:
Mpa
式中
Z
-蜗杆传动的接触线长度和曲率半径对接触应力的影响系数,简称接触系ρ
数,查图
8.3.3 蜗杆传动的强度计算
蜗轮齿面接触疲劳强度计算
蜗轮齿根接触疲劳强度的验算公式为:
σ
≤[σ]H MPa
H
式中:
[σ]H-蜗轮齿面的许用接触应力。
设计公式为:
mm
蜗轮齿根弯曲疲劳强度计算
蜗轮齿根弯曲疲劳强度的验算公式为:
σ
F
≤[σ]F MPa
式中:
σ
F
-蜗轮齿根的许用弯曲应力。
设计公式为:
mm3
许用应力
当蜗轮材料为强度极限σB<300MPa的青铜,蜗轮传动的主要失效形式为蜗轮齿面接触疲劳失效。
因此,承载能力取决于蜗轮的接触疲劳强度。
则
[σ]H=K HN[σ]H',其中[σ]H'为基本许用应力,查表;K HN为接触疲劳强度的寿命系数,K HN=
铸锡青铜蜗轮的基本许用接触应力[σ]H' (Mpa)
蜗轮材
料铸造方法
蜗杆螺旋面的硬
度
≤45HRC >45HRC
铸锡磷青铜ZCuSn10P1
砂模铸造150 180 金属模铸造220 268
式中:
γ-普通圆柱蜗杆分度圆上的导程角;
查表选取φ-当量摩擦角,, 其值可根据滑动速度v
s
当量摩擦角φ
滑动速度v s由图得:
m/s v
-蜗杆分度圆的圆周速度,m/s;
1
d
-蜗杆分度圆直径,mm;
1
n
-蜗杆的速度,r/min。
1
η
-油的搅动和飞溅损耗时的效率;
2
2.蜗轮结构:
蜗轮常采用组合结构,由齿冠和齿芯组成。
联结方式有:铸造联结、过盈配合联结和螺栓联接,结构分别见下图。
蜗轮只有在低速轻载时采用整体式。
返回。