一种多输入多输出系统传递函数的实用计算方法
- 格式:pdf
- 大小:1.37 MB
- 文档页数:1
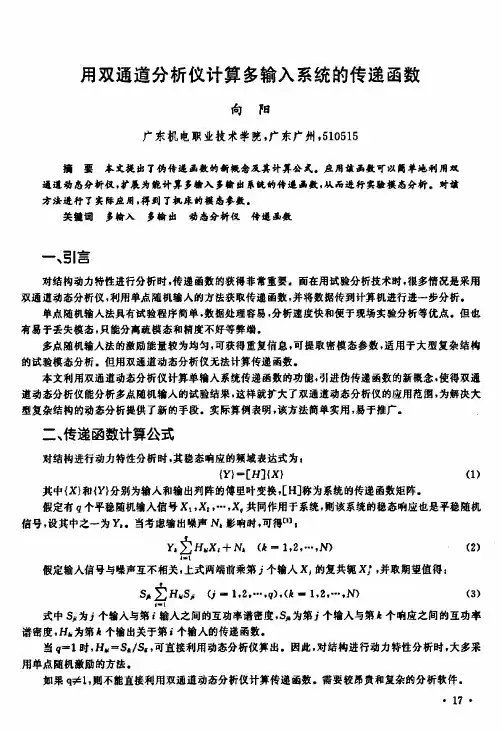
用双通道分析仪计算多输入系统的传递函数
作者:向阳
作者单位:广东机电职业技术学院,广东广州,510515
1.兰秋平.简新春德兴铜矿循环经济战略思考[会议论文]-2006
2.田利.王启山预氧化与气浮工艺联用处理低温低浊黄河水效果比较[会议论文]-2006
3.杨建红.张认成.房怀英基于Duffing振子信号检测的高压电弧短路监测系统[会议论文]-2006
4.孙建平.曹志清.张爱军基于STL文件的快速成型切片误差分析[会议论文]-2006
5.樊远征超精模糊控制算法与模块化及其在节能中的应用[会议论文]-2006
6.张云电.林金钳.胡皇印基于BP神经网络的压电换能器谐振频率预测[会议论文]-2006
7.黄伟.吴国安.汤清华.易冬柏基于FPGA的1553B总线接口板的设计[会议论文]-2006
8.严德昆二阶过阻尼系统传递函数辨识的新方法[期刊论文]-控制理论与应用2001,18(4)
9.苏添发.戴曙光.穆平安车牌及其字符分割的方法研究[会议论文]-2006
引用本文格式:向阳用双通道分析仪计算多输入系统的传递函数[会议论文] 2006。
双输入双输出状态空间方程转传递函数在控制系统工程中,状态空间方程是描述系统动态行为的一种数学模型。
它通常由一个或多个状态变量的一阶微分方程和输出公式组成。
当一个系统有两个输入和两个输出时,我们称之为双输入双输出系统。
在实际工程应用中,我们常需要将双输入双输出状态空间方程转换为传递函数形式,以便更方便地进行分析和设计。
将双输入双输出状态空间方程转换为传递函数的步骤如下:1. 确定系统的状态变量,并将它们表示为向量形式。
令x(t) = [x1(t), x2(t), …, xn(t)]T为状态向量,其中T表示向量的转置。
2. 设计系统的输入输出方程。
对于双输入双输出系统,我们有:y1(t) = c1 x(t) + d11 u1(t) + d12 u2(t)y2(t) = c2 x(t) + d21 u1(t) + d22 u2(t)其中y1(t)和y2(t)为系统的两个输出,u1(t)和u2(t)为系统的两个输入,c1、c2、d11、d22、d12、d21分别为系统的常数系数。
3. 将状态方程和输出方程合并为一个矩阵方程。
将状态方程写成向量形式得到:x˙(t) = Ax(t) + Bu(t)其中x˙(t)表示状态的一阶导数,A表示状态变量之间的关系矩阵,B表示控制输入和状态变量之间的关系矩阵,u(t) = [u1(t), u2(t)]T表示输入向量。
将输出方程中的x(t)代入状态方程中:y(t) = Cx(t) + Du(t)其中y(t) = [y1(t), y2(t)]T表示输出向量,C表示输出和状态变量之间的关系矩阵,D表示输入和输出之间的关系矩阵。
4. 将上述矩阵方程整理并求解,得到系统的传递函数形式。
将状态方程中的x(t)用Laplace变换表示,得到:(sI – A)X(s) = BU(s)其中I是单位矩阵,s是Laplace变换的复变量,X(s)和U(s)分别表示状态变量和输入变量的Laplace变换。
MIMO传递函数转化为状态空间模型Matlab代码1. 介绍MIMO(多输入多输出)系统是指系统具有多个输入和多个输出的特性。
在控制系统领域中,MIMO系统的建模和分析是非常重要的。
传递函数和状态空间模型是两种常用的系统建模方法。
本文将介绍如何将MIMO系统的传递函数转化为状态空间模型,并给出相应的Matlab代码实现。
2. MIMO系统的传递函数表示MIMO系统的传递函数通常表示为一个矩阵,每个元素对应一个输入到一个输出的传递函数。
假设有n个输入、m个输出,则MIMO系统的传递函数可以表示为一个m×n的传递函数矩阵G(s)。
传递函数矩阵的元素可以用s表示,如G11(s)、G12(s)等。
3. MIMO系统传递函数到状态空间模型的转化方法MIMO系统的传递函数可以通过状态空间模型来表示。
状态空间模型的基本形式如下:\[ \dot{x}(t) = Ax(t) + Bu(t) \]\[ y(t) = Cx(t) + Du(t) \]其中,A是状态矩阵,B是输入矩阵,C是输出矩阵,D是传递函数零极点对应的矩阵。
MIMO系统的传递函数可以通过以下步骤转化为状态空间模型:1)将传递函数矩阵分解为多个SISO(单输入单输出)系统的传递函数;2)针对每个SISO系统,可以将其转化为状态空间模型;3)将各个SISO系统的状态空间模型组合成一个整体的MIMO系统的状态空间模型。
4. Matlab代码实现下面我们通过一个实例来演示如何用Matlab将MIMO系统的传递函数转化为状态空间模型。
假设传递函数矩阵为:\[ G(s) = \begin{bmatrix} \frac{2s+1}{s^2+3s+2}\frac{3s+2}{s^2+4s+3} \\ \frac{4s+1}{s^2+2s+1}\frac{5s+2}{s^2+3s+2} \end{bmatrix} \]我们需要将传递函数矩阵分解为四个SISO系统的传递函数:\[ G11(s) = \frac{2s+1}{s^2+3s+2} \]\[ G12(s) = \frac{3s+2}{s^2+4s+3} \]\[ G21(s) = \frac{4s+1}{s^2+2s+1} \]\[ G22(s) = \frac{5s+2}{s^2+3s+2} \]针对每个SISO系统,我们可以将其转化为状态空间模型,以G11(s)为例:```Matlab将传递函数G11(s)转化为状态空间模型num = [2, 1]; 分子系数den = [1, 3, 2]; 分母系数[A11, B11, C11, D11] = tf2ss(num, den); 转化为状态空间模型```将各个SISO系统的状态空间模型组合成整体的MIMO系统的状态空间模型:```Matlab对四个SISO系统的状态空间模型进行组合A = [A11, A12; A21, A22];B = [B11, B12; B21, B22];C = [C11, C12; C21, C22];D = [D11, D12; D21, D22];```至此,我们成功地将MIMO系统的传递函数转化为状态空间模型,并通过Matlab代码实现了这一过程。
多输入多输出系统传递函数矩阵
多输入多输出系统传递函数矩阵是指将一个多变量系统的所有输入和输出以矩阵形式表示的传递函数。
在控制系统设计中,我们经常会遇到多输入多输出系统的问题,因此需要有一种有效的方法来描述和分析这种系统。
对于一个n输入n输出的系统,传递函数矩阵H(s)可以表示为: H(s) = [H11(s) H12(s) ... H1n(s)]
[H21(s) H22(s) ... H2n(s)]
[... ... ... ]
[Hn1(s) Hn2(s) ... Hnn(s)]
其中,Hij(s)表示第i个输出对第j个输入的传递函数。
传递函数矩阵可以简化多输入多输出系统的分析和设计过程,使得我们可以更方便地进行控制器设计和系统优化。
同时,传递函数矩阵也可以用于描述多个子系统之间的相互作用,帮助我们更好地理解系统的整体行为。
在实际应用中,我们可以使用矩阵运算来计算传递函数矩阵,并根据需要对其进行简化或扩展。
通过对传递函数矩阵的分析,我们可以找到系统的稳定性、响应速度、误差等特性,从而选择合适的控制策略和参数来实现系统的控制和优化。
- 1 -。
第一章习题1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性.仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法.1-3数字仿真包括那几个要素?其关系如何?答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验.1—4为什么说模拟仿真较数字仿真精度低?其优点如何?.答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度高。
(3)能快速求解微分方程.模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关.(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真.(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力,大容量存储和处理数据的能力与设计者的综合分析,逻辑判断以及创造性思维结合起来,用以加快设计进程,缩短设计周期,提高设计质量的技术.控制系统CAD可以解决以频域法为主要内容的经典控制理论和以时域法为主要内容的现代控制理论。
多输入多输出控制系统根轨迹
多输入多输出(MIMO)控制系统的根轨迹是指系统在参数空间中的一组轨迹,这些轨迹描述了系统的闭环特性。
根轨迹主要用于分析系统的稳定性和动态响应。
对于MIMO系统,根轨迹的分析通常涉及多个输入和多个输出之间的关系。
在根轨迹图上,每个输入-输出通道的根轨迹呈现为一组曲线,展示了系统参数变化时闭环特性的变化。
以下是MIMO系统根轨迹分析的一般步骤:
1.系统传递函数:将MIMO系统表示为传递函数矩阵。
每个输入-输出通道对应于一个独立的传递函数。
2.特征方程:从传递函数中导出闭环系统的特征方程,这是导致系统稳定性的方程。
3.参数变化:改变系统的参数,例如增益或其他控制器参数。
这可以通过改变控制器的增益矩阵或者系统的参数矩阵来实现。
4.计算根轨迹:使用特征方程,计算参数变化时的系统极点。
这些极点构成了根轨迹。
5.分析:通过分析根轨迹,可以了解系统的稳定性、过渡特性和频率响应。
MIMO系统的根轨迹分析对于控制系统设计和调整是非常有用的,因为它提供了关于系统动态特性的直观理解。
专利名称:一种多用户多输入多输出系统的信息反馈方法专利类型:发明专利
发明人:周欢,孙鹏
申请号:CN201510122954.4
申请日:20150319
公开号:CN106033991A
公开日:
20161019
专利内容由知识产权出版社提供
摘要:本发明提出一种多用户多输入多输出系统的信息反馈方法,该方法为:在PUSCH信道上,UE同时反馈单用户MIMO信道状态信息和多用户MIMO信道状态信息,并且多用户MIMO信道状态信息位于单用户MIMO信道状态信息之后,所述多用户MIMO状态信息包含MU-PMI、MU-RI、MU-CQI。
本发明增加了多用户情况下的信道状态信息的反馈,可以提供更多的多用户场景下的信道传输情况,能够有效提高多用户多输入多输出系统的性能。
申请人:北京信威通信技术股份有限公司
地址:100193 北京市海淀区东北旺西路八号中关村软件园七号楼信威大厦
国籍:CN
更多信息请下载全文后查看。