激光测距的原理114页PPT
- 格式:ppt
- 大小:10.37 MB
- 文档页数:114

激光测距的原理
激光测距是利用激光器发出的高能量、高频率的光束进行测量的一种方法。
它基于光的传播速度是一个已知的常数,并且在真空中时速为299,792,458米每秒的原理。
激光测距仪由发射器、接收器以及控制电路组成。
发射器发出一个短脉冲的激光束,该激光束经过一定的光学器件后,瞄准待测距物体上的目标点。
当激光束照射到目标点上后,部分能量会被目标吸收,而另一部分则会被反射回来。
接收器接收到反射回来的光束,并将其转换为电信号。
控制电路会根据接收到的信号,计算出激光从发射到返回所经过的时间差,即“飞行时间”。
由于光的传播速度已知,通过时间差可以计算出激光从发射到返回所经过的距离。
在实际测量中,激光测距仪会通过多次发射-接收的循环进行测量,从而提高测量的准确性。
通过对多次测量结果的处理,可以得到目标点与测量仪之间的距离。
激光测距的原理基于光的传播速度的稳定性和高精度,因此在许多领域中得到了广泛的应用,例如地质勘探、建筑测量、工业制造等。
它具有测量速度快、精度高、非接触测量等优点,成为现代测量技术中不可或缺的一部分。

激光在军事中的应用激光测距激光测距技术出现于20世纪60年代中期,最早在航空、航天中得到应用、随着激光技术和数字处理技术的发展,由于其优异的性能得到了广泛的应用。
激光测距(laser distance measuring)是以激光器作为光源进行测距。
根据激光工作的方式分为连续激光器和脉冲激光器。
氦氖、氩离子、氪镉等气体激光器工作于连续输出状态,用于相位式激光测距;双异质砷化镓半导体激光器,用于红外测距;红宝石、钕玻璃等固体激光器,用于脉冲式激光测距。
激光测距仪由于激光的单色性好、方向性强等特点,加上电子线路半导体化集成化,与光电测距仪相比,不仅可以日夜作业、而且能提高测距精度,显著减少重量和功耗,使测量到人造地球卫星、月球等远目标的距离变成现实。
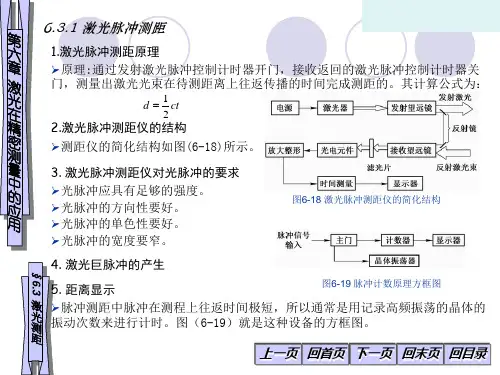
激光测距仪是利用激光对目标的距离进行准确测定(又称激光测距)的仪器。
激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。
激光测距有脉冲法、相位法和脉冲—相位法。
脉冲法准确度低,相位法准确度高1.脉冲法测距过程:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间。
光速和往返时间的乘积的一半,就是测距仪和被测量物体之间的距离。
脉冲法测量距离的精度是一般是在+/- 1米左右。
另外,此类测距仪的测量盲区一般是15米左右。
原理:测距机发射矩形波激光脉冲,入射被测目标后返回部分的激光由,c为光速,t为激光脉冲测距机接收。
测距机与目标物的距离L为 L=c t2往返时间。
在激光器发射功率一定的情况下,光电探测器接受的回波功率P L的大小与测距机的光学系统的透过率有关,与目标物物理性质有关,与被测距离L的大小有关。
在不同目标下的测距方程:漫反射大目标:P L=P T A R2πL2ρK f K R K T K2α漫反射小目标:P L=P T A O A R2πΩT LρK f K R K T K2α角反射棱镜合作目标:P L=P T A t A RΩtΩT LρK f K R K T K2α式中,P T为发射功率;A R为接收光学系统的有效面积,A O为目标的有效面积,A t为角反射棱镜的有效面积,ΩT为经发散光学系统激光发散角,Ωt为角反射棱镜的激光发散角,K T为干涉滤光片的峰值透过率,K R为接收系统的透过率,K T为发射系统透过率,Kα为单程大气透过率,ρ为目标反射率。
激光测距仪原理图
激光测距仪是一种利用激光技术进行测距的仪器,其原理图如下所示:
1. 发射器。
激光测距仪的发射器部分主要包括激光发生器和光学系统。
激光发生器产生一
束高能激光,并通过光学系统将其聚焦成一束细线,以便于准确照射到目标物体上。
2. 接收器。
激光测距仪的接收器部分包括接收光电探测器和信号处理器。
接收光电探测器
接收被测物体反射回来的激光,并将其转换成电信号,然后通过信号处理器进行处理和放大,以便后续的测距计算。
3. 时间测量模块。
时间测量模块是激光测距仪的核心部分,它利用接收到的激光信号的时间差来
计算目标物体与测距仪之间的距离。
通过精确的时间测量,可以实现对目标物体距离的高精度测量。
4. 数据处理与显示模块。
数据处理与显示模块接收时间测量模块传递过来的距离数据,并进行进一步的
处理和计算,最终将测得的距离数据显示在仪器的显示屏上,以便用户进行观测和记录。
5. 电源模块。
激光测距仪的电源模块提供仪器所需的电能,以保证仪器正常工作。
通常采用
锂电池或者充电电池供电,以便于激光测距仪在户外环境下进行使用。
激光测距仪的原理图如上所述,通过发射器发射激光,接收器接收反射激光并
进行时间测量,最终通过数据处理与显示模块将测距结果显示出来。
激光测距仪在
工程测量、地质勘探、建筑施工等领域有着广泛的应用,其原理图的了解对于深入理解激光测距仪的工作原理具有重要意义。
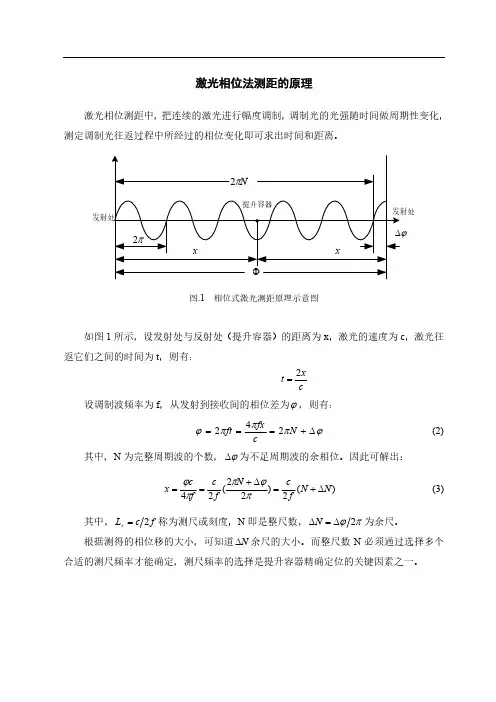
激光相位法测距的原理激光相位测距中,把连续的激光进行幅度调制,调制光的光强随时间做周期性变化,测定调制光往返过程中所经过的相位变化即可求出时间和距离。
图.1 相位式激光测距原理示意图如图1所示,设发射处与反射处(提升容器)的距离为x ,激光的速度为c ,激光往返它们之间的时间为t ,则有:cxt 2设调制波频率为f ,从发射到接收间的相位差为 ,则有:N cfxft 242 (2) 其中,N 为完整周期波的个数, 为不足周期波的余相位。
因此可解出:)(2)22(24N N fcN f c f c x(3) 其中,f c L s 2 称为测尺或刻度,N 即是整尺数, 2 N 为余尺。
根据测得的相位移的大小,可知道N 余尺的大小。
而整尺数N 必须通过选择多个合适的测尺频率才能确定,测尺频率的选择是提升容器精确定位的关键因素之一。
多尺测量方法测量正弦信号相移的方法都无法确定相位的整周期数,即不能确定出相位变化中 2的整倍数N ,而只能测量不足 2的相位尾数 ,因此公式(2.3)中的N 值无法确定,使该式产生多个解,距离D 就不能确定。
解决此缺陷的办法是选用一个较低的测尺频率s f ,使其测尺长度s L 稍大于该被测距离,这种状况下不会出现距离的多值解。
但是由于测相系统的测相误差,会导致测距误差,并且选用的s L 越大则测距误差越大。
因此为了得到较高的测距精度而使用较短的测尺长度,即较大的测尺频率s f ,系统的单值测定距离就相应变小。
为了解决长测程和高精度之间的矛盾,一般使用的解决办法是:当待测距离D 大于基本测尺sb L (精测测尺)时,可再使用一个或几个辅助测尺sl L (又叫粗测测尺),然后将各个测尺测得的距离值组合起来得到单一的和精确的距离信息。
由此可见,用一组测尺共同对距离D 进行测量就可以解决距离的多值解,即用短尺保证精度,用长尺保证量程。
这样就解决高精度和长测程的矛盾[4]。
本系统选用10米作为精尺,1000米作为粗尺,带入公式即可求得精尺频率和粗尺频率:精尺频率 MHz L cf 152510(4) 粗尺频率 kHz L cf 150210001000 (5) 其中,光速s m c /1038 。