2018年TI杯手势识别
- 格式:doc
- 大小:762.76 KB
- 文档页数:13
基于Leap Motion指尖位置的手势提取和识别技术研究周开店;谢钧;罗健欣【摘要】Leap Motion是最近推出的一款比较新颖的手部信息采集设备,它能够高精度、高帧率地跟踪捕获手部信息,基于此特性,本文阐述了一种基于指尖位置和方向信息进行手势提取和识别的研究方案.采用Leap Motion传感器进行手势的三维空间坐标信息采集,从中提取指尖坐标及方向向量信息,建立手势识别模型,构建手势特征数据.对特征数据进行归一化处理后输入到支持向量机进行训练,实现对特定手势的识别.实验结果表明,提出的手势识别方案平均识别精度达到97.33%,具有较高的准确性和鲁棒性.【期刊名称】《微型机与应用》【年(卷),期】2017(036)002【总页数】4页(P48-51)【关键词】手势识别;LeapMotion;指尖位置;方向信息;支持向量【作者】周开店;谢钧;罗健欣【作者单位】解放军理工大学指挥信息系统学院,江苏南京210007;解放军理工大学指挥信息系统学院,江苏南京210007;解放军理工大学指挥信息系统学院,江苏南京210007【正文语种】中文【中图分类】TP391.4近年来,手势识别在众多领域(如:人机交互、机器人应用、电脑游戏、手语翻译等方面)的广泛应用得到了更多人的关注。
当前可用于手势识别的相对低成本的深度相机有:TOF相机和微软公司推出的Kinect设备,通过不同的方法获取手部的深度信息以提高手势识别的准确性。
这些方法提供的手势识别方案均是从深度信息提取的特征值,通用摄像头采集人手图像虽然能够获得稳定的图像序列乃至深度信息,但提取出的人手信息必须经过复杂的图像处理与识别过程,难以保证快速、准确地估计人手姿态,同时它们无法实现近距离的高精度手势识别[1]。
Leap Motion传感器的推出给手势识别领域带来了一种全新的方式,不同于Kinect对视野范围内追踪到物体的整体框架描述,Leap Motion的目标是只针对手部信息的追踪描述,通过对手部信息包括指尖、关节点、方向向量、法向量等的精细化描述,利用这些信息实现对手势的特征提取和准确识别[2]。
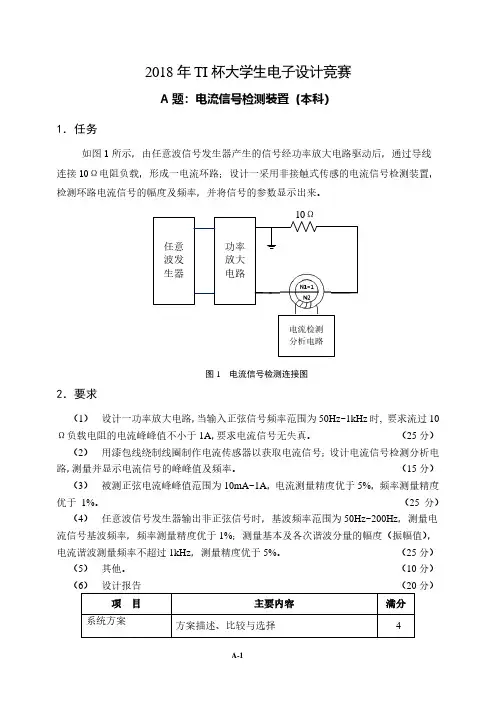
2018年TI杯大学生电子设计竞赛A题:电流信号检测装置(本科)1.任务如图1所示,由任意波信号发生器产生的信号经功率放大电路驱动后,通过导线连接10Ω电阻负载,形成一电流环路;设计一采用非接触式传感的电流信号检测装置,检测环路电流信号的幅度及频率,并将信号的参数显示出来。
图1 电流信号检测连接图2.要求(1)设计一功率放大电路,当输入正弦信号频率范围为50Hz~1kHz时, 要求流过10Ω负载电阻的电流峰峰值不小于1A,要求电流信号无失真。
(25分)(2)用漆包线绕制线圈制作电流传感器以获取电流信号;设计电流信号检测分析电路,测量并显示电流信号的峰峰值及频率。
(15分)(3)被测正弦电流峰峰值范围为10mA~1A,电流测量精度优于5%,频率测量精度优于1%。
(25分)(4)任意波信号发生器输出非正弦信号时,基波频率范围为50Hz~200Hz,测量电流信号基波频率,频率测量精度优于1%;测量基本及各次谐波分量的幅度(振幅值),电流谐波测量频率不超过1kHz,测量精度优于5%。
(25分)(5)其他。
(10分)(6)设计报告(20分)项目主要内容满分系统方案方案描述、比较与选择 4理论分析与计算电流测量方法谐波分量测量方法5 电路设计电路设计 5测试方案与测试结果测试方案测试结果完整性测试结果分析4设计报告结构及规范性摘要、报告正文结构、公式、图表的完整性和规范性2 总分203.说明(1)为提高电流传感器的灵敏度,可用用漆包线在锰芯磁环上绕制线圈,制作电流传感器。
(2)在锰芯磁环上绕N2匝导线,将流过被测电流的导线从磁环中穿过(N1=1),构成电流传感器。
2018年TI 杯大学生电子设计竞赛B 题:灭火飞行器(本科)1.任务基于四旋翼飞行器设计一个灭火飞行器(简称飞行器)。
飞行器活动区域示意图如图1所示。
在图1中,左下方的圆形区域是飞行器起飞及降落点;右侧正方形区域是灭火防区,防区中有4个用红色LED 模拟的火源(火源用单只0.5W 红色发光二极管来实现,建议LED 电流不超过25mA )。
2023年TI杯人工智能竞赛D题语音识别系统1. 背景语音识别系统是一种能够将人类语音转换为文本的技术。
它在日常生活中有广泛的应用,例如语音助手、电话语音识别和语音翻译等。
本文将探讨2023年TI杯人工智能竞赛D题关于语音识别系统的相关要求和技术。
2. 目标我们的目标是设计和开发一个高效准确的语音识别系统,能够在多种语境下准确地将语音转换为文本。
通过参加2023年TI杯人工智能竞赛D题,我们将展示我们的技术能力和创新性,以提供更好的语音识别解决方案。
3. 方法为达到我们的目标,我们将采用以下方法:- 数据收集和预处理:我们将收集并准备大量的语音数据进行模型训练。
数据的收集可以通过采集用户语音样本,或使用公开可用的语音数据集。
- 特征提取和声学模型:我们将使用现有的特征提取算法,如MFCC和FBANK,将语音信号转换为特征向量。
接下来,我们将使用深度研究模型,如卷积神经网络(CNN)或循环神经网络(RNN),训练声学模型进行语音识别任务。
4. 实施计划以下是我们的实施计划:- 数据采集和准备(1个月):收集并准备用于训练的语音数据。
- 模型开发和训练(2个月):设计和开发语音识别模型,并使用准备好的数据进行训练。
- 模型评估和优化(1个月):评估模型的性能,并进行必要的优化和改进。
- 系统集成和测试(1个月):将开发的语音识别系统集成到完整的解决方案中,并进行系统级测试和调优。
5. 预期结果我们预期的结果是开发一个高效准确的语音识别系统,能够在不同场景下准确地将语音转换为文本。
通过参加2023年TI杯人工智能竞赛D题,我们希望能够展示我们的创新技术和解决方案,并与其他团队进行比较和交流。
6. 参考资料以下是我们计划使用的一些参考资料:以上是关于2023年TI杯人工智能竞赛D题语音识别系统的文档,希望能对您有所帮助。
如有任何问题,请随时与我联系。
谢谢!。
世界杯英语:一分钟教你看懂足球裁判手势世界杯小组赛已经过去一轮了,在听球迷们热烈讨论每场比赛的精彩和遗憾的同时,非球迷的你们是否也对比赛的规则有了些了解呢?虽说足球比赛中的核心人物是双方场上球员,但其实裁判的角色也是不容忽视的。
今天,我们就为大家介绍一下足球比赛中,裁判常用的手势。
下次看比赛,就不用老问别人,裁判的手势是什么意思了。
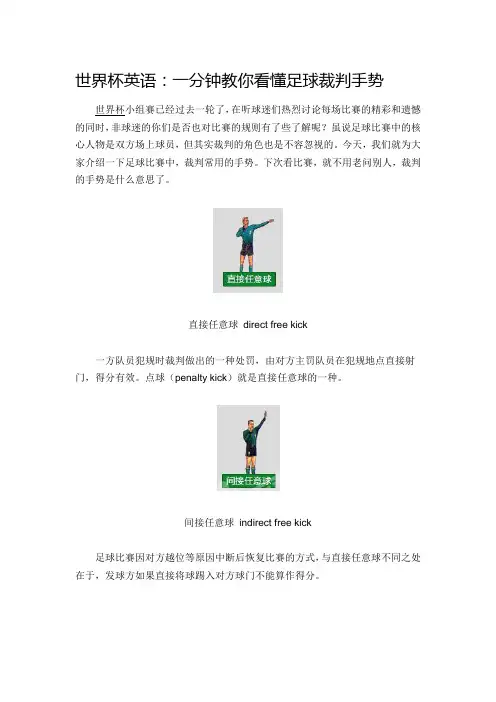
直接任意球direct free kick一方队员犯规时裁判做出的一种处罚,由对方主罚队员在犯规地点直接射门,得分有效。
点球(penalty kick)就是直接任意球的一种。
间接任意球indirect free kick足球比赛因对方越位等原因中断后恢复比赛的方式,与直接任意球不同之处在于,发球方如果直接将球踢入对方球门不能算作得分。
替补substitute有场上球员疲劳或受伤时,教练就可以叫其他球员代替此球员从而使比赛人数补成平衡。
掷界外球throw-in比赛中,任意一方队员将足球碰出边线,则另一方队员掷界外球,让比赛继续进行。
黄牌警告yellow card足球比赛中裁判会针对球员的一些特定犯规行为出示黄牌进行警告,一场比赛连续得到两张黄牌的球员将被罚下场。
红牌警告red card足球比赛中球员因为严重犯规行为而受到的处罚,得到红牌的球员会被立即罚下场,并且不能参加下一场比赛。
继续比赛resume play比赛中断后示意比赛继续进行。
越位offside进攻球员在对方半场传球时,若该球员离对方球门的位置比足球和对方倒数第二名防守队员离其球门的位置更近,这就叫越位。
近端越位offside on near side of field远端越位offside on far side of field中端越位offside in center of field。

基于X-CUBE-AI的神经网络手语识别系统设计
牛帅;宗诗怡;胡威;许彬;董振华
【期刊名称】《工业控制计算机》
【年(卷),期】2024(37)3
【摘要】手语交流是聋哑人与他人交流的主要方法,设计了一款基于STM32的神经网络手语识别系统,采用TensorFlow和Keras机器学习框架训练网络模型,由于训练数据的局限性,加入L2正则化以解决训练过拟合问题。
使用意法半导体推出的STM32Cube.AI工具包在STM32嵌入式平台上部署神经网络,搭载OV2640摄像头采集图像并进行缩放处理,将图像数据传入网络进行推理可获得识别结果。
经测试,网络模型获得了较好的鲁棒性和适应性,在STM32上运行平均每帧推理时间为15.8 ms,平均准确率达92.3%。
使用STM32作为手语识别终端,极大地提高了设备的便携性,节约成本,反应迅速。
为聋哑人与正常人交流提供了一种新的解决方案,具有较高的实际应用价值。
【总页数】3页(P21-23)
【作者】牛帅;宗诗怡;胡威;许彬;董振华
【作者单位】金陵科技学院电子信息工程学院;东南大学成贤学院经济管理学院【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于3D卷积神经网络的手语动作识别
2.基于肌音信号图像化和卷积神经网络的手语识别研究
3.基于肤色分割和卷积神经网络的手语识别系统
4.基于注意力机制的3D卷积神经网络孤立词手语识别
5.基于无线传感技术与卷积神经网络的静态手语识别方法
因版权原因,仅展示原文概要,查看原文内容请购买。
全国大学生物联网创新创业大赛在互联网经济的发展环境之下,电子商务迅速普及,这些发展在为大学生的互联网创业带来机遇的同时,也使大学生创业面临一定程度的挑战。
今天店铺为大家整理了关于全国大学生物联网创新创业大赛的相关文章,希望对读者有所帮助启发。
中国大学生物联网创新创业大赛简介中国大学生物联网创新创业大赛(原美新杯中国MEMS传感器应用大赛),是由北京大学、全球华人微纳米分子系统学会、无锡市人民政府主办的教育部质量工程支持项目之一,是国际大学生物联网创新创业大赛(International Contest of Applications in Network of Things,简称iCAN)的中国选拔赛,是面向大学生创新的年度科技竞赛,始于2007年,秉承“传递iCAN理念、激发创新热情、点燃创业梦想”精神,倡导科技创新创业服务社会、改善人类生活,引导和激励高校学生勇于创新,发现和培养一批有作为、有潜力的优秀青年科技人才,促进和加强物联网等高科技领域的产学研结合,推动物联网相关高科技产业的发展,为高科技创新创业搭建交流平台。
大赛主办方指导单位教育部理工科教学指导委员会(机械\电子\计算机)主办单位北京大学全球华人微纳米分子系统学会无锡市人民政府国际协办单位IEEE Nanotechnology CouncilVDEUnited MEMS ParkAsian Nano Forum大赛主办方名誉主席何志明(美国工程院院士,台湾中研院院士,美国UCLA前副校长) 杨叔子(中国科学院院士,华中科技大学前校长)王阳元(中国科学院院士,北京大学微电子研究院首席科学家)第七届中国大学生物联网创新创业大赛进行中:让生活变得更美好第七届中国大学生物联网创新创业大赛东北一赛区比赛正在黑龙江大学火热进行,来自东北地区10余所高校的55组代表队同场对决。
参赛选手表示,物联网大赛与生活息息相关,参赛项目的灵感大多来自生活,大赛在为学生搭建创新创业平台的同时,还可以切实提高生活品质。
2023年TI杯大学生电子设计竞赛题D-手势识别题目:手势识别系统一、引言手势识别是一项前沿的技术,在人机交互和智能设备控制等领域具有广阔的应用前景。
本次大学生电子设计竞赛的题目为手势识别系统,旨在培养参赛选手的创新能力和实践能力,挖掘他们在手势识别领域的潜力。
参赛选手需要设计并实现一个能够识别人类手势的系统,该系统应能够准确地分析并识别出手势的类型,并与外部设备进行交互。
二、系统要求1.硬件要求:(1)拍摄设备:参赛选手可以选择合适的拍摄设备,如摄像头、深度相机等,并确保其拍摄质量良好。
(2)传感器:选手可以根据需求选择相关的传感器,如加速度传感器、陀螺仪传感器等,以提高系统的准确性和实用性。
2.软件要求:(1)手势识别算法:参赛选手需设计一种有效的手势识别算法,能够识别出人类手势的类型,如数字、字母、动作等,并确保算法的准确性和实时性。
(2)交互界面:选手需要设计一个友好的交互界面,使用户能够方便地与系统进行交互,并通过手势控制来完成特定操作,如播放音乐、调节音量、切换画面等。
(3)数据处理和存储:选手需设计一套完整的数据处理和存储方案,能够对拍摄到的手势数据进行处理和分析,并将识别结果保存在合适的存储介质中,以便后续的数据分析和应用。
3.功能要求:(1)手势识别:系统能够准确地识别出用户手势的类型,并根据手势类型执行相应的操作,如显示相关内容、控制音视频播放等。
(2)实时性:系统应具备实时处理手势数据的能力,能够在用户进行手势操作时快速响应,并实时更新交互界面。
(3)稳定性:系统应具备稳定的工作性能,能够在各种不同场景和环境下正常工作,并保持较高的准确性和鲁棒性。
三、评分标准本次大学生电子设计竞赛的评分标准如下:(1)硬件设计(30%):包括拍摄设备的选择与设计、传感器的合理应用等。
(2)软件设计(40%):包括手势识别算法的设计与实现、交互界面的设计与实现、数据处理与存储方案的设计等。
(3)功能实现(20%):包括手势识别的准确性、实时性和稳定性等。

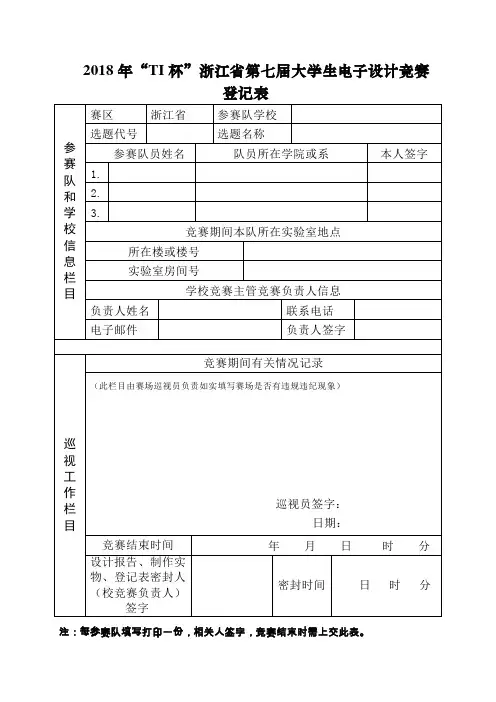
2018年TI杯大学生电子设计竞赛
电流信号检测装置(A题)测试记录与评分表
参赛队编号:开始准备时间:开始测试时间:
参赛队员签字:测评人:
测试说明
1.在电流环路中串接一交流电流表,或者在环路电阻上用示波器测量信号;2.在第(2)项测量时着重考察频率、电流测量功能的实现,第(3)项测量时着重考察测量精度;
3.在第(2)、(4)项测量时,使用自制功率驱动模块;
4.在第(3)项测量时,可使用公用的标准功率驱动模块,或高精度钳形电流表为参考;
5.第(4)项谐波测量误差大于10%时不给分。
6.在进行(1)测试时,信号源产生1kHz 10V PP正弦波时,电流环路中电流不小于0.5A(峰峰值)时给分;另外根据电流驱动能力及波形失真酌情给分。
7.在进行(2)测试时,信号源输出正弦波的频率、电压幅度变化时,根据装置显示的测量结果与实际参数误差大小给分。
8.(3)项开始测试,每一种电流调试保持1分钟,分别是:1000、200、50、10mA;观察电流保持期间大部分数据的值;
9.继续进行(4)项测试,设置基波电流500mA、3次谐波电流30mA、5次谐波电流10mA;保持1分钟;。
基于自适应遗传算法的手势识别
王修晖;鲍虎军
【期刊名称】《计算机辅助设计与图形学学报》
【年(卷),期】2007(019)008
【摘要】基于小样本库的手势识别是先进人机交互研究中的一个重要分支.根据Tortoise人手模型训练手势模式库并结合交互者的具体手部特征进行手形训练,生成适用于特定交互者的手势模式库.在交互过程中,根据来自一个或多个同步摄像头的视频信息进行基于自适应遗传算法的手势识别.实验结果表明,在环境光照基本稳定的条件下,文中算法可以实现鲁棒的实时手势识别.
【总页数】7页(P1056-1062)
【作者】王修晖;鲍虎军
【作者单位】中国计量学院信息工程学院,杭州,310018;浙江大学CAD&CG国家重点实验室,杭州,310058;浙江大学CAD&CG国家重点实验室,杭州,310058【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于改进自适应正交匹配追踪算法的手势识别 [J], 李贝;孙瑛;李公法;蒋国璋;孔建益;江都;陈迪斯
2.基于增量自适应学习的在线肌电手势识别 [J], 李愚;柴国钟;卢纯福;唐智川
3.基于Gabor特征的遗传算法实现静态手势识别 [J], 涂心琪; 兰红
4.基于自适应多分类器融合的手势识别 [J], 刘肖;袁冠;张艳梅;闫秋艳;王志晓
5.基于Myo旋转偏移估计与自适应校正的手势识别方法 [J], 李自由;王丰焱;赵新刚;丁其川;张道辉;韩建达
因版权原因,仅展示原文概要,查看原文内容请购买。
足球盛宴的科技范——聚焦2018年俄罗斯世界杯黑科技作者:暂无来源:《发明与创新·大科技》 2018年第8期不得不说,2018年俄罗斯世界杯真的挺“聪明”——从有“智慧芯”的足球到球场内的裁判辅助,再到场外的观看体验,很多亮眼的科技元素渗透到了绿茵场,就像那些精彩绝伦的进球一样,给人留下深刻印象。
2018年俄罗斯世界杯于6月14日至7月15日举行,本届世界杯的看点除了球星炫酷的球技、热情的球迷、绿草如茵的球场之外,还有比赛中用到的黑科技。
除了精彩比赛外,作为球场上的关键道具,足球也成为每届世界杯的一大看点。
2018年俄罗斯世界杯官方指定用球“电视之星(Telstar18)”不只在外观上充满现代气息,同时也采用了一些现代化的工艺和科技。
从1970年起,世界杯组委会就指定阿迪达斯来设计比赛专用球,自第一款足球“电视之星”起,至今已经设计了13款风格独特的世界杯足球。
上一届巴西世界杯足球“桑巴荣耀”以6块十字形皮革拼成,而这次的Telstar18不仅名字致敬了第一款足球,结构也继承了上一届的前辈——它也是由六块形状独特的球面组成,运用了无缝粘贴技术,大大节省了皮料。
由于粘胶可以和皮料形成配位化学键,因此可以做到“难解难分”,保证球体的牢固。
但是,结构上的特殊性还不足以称为黑科技—— Telstar18内部装有近场通信芯片,这可以说是黑科技的核心。
近场通信(Near Field Communication,简称NFC)又称近距离无线通信,是一种通过无线电信号实现短距离数据传输的技术。
它最大的优势是可以在0.1毫秒内快速配对,而蓝牙通常需要6秒左右。
这项技术离人们的生活其实并不遥远,很多手机、公交卡、门禁卡都使用了这一技术,只是之前没人将它运用到足球上。
当芯片植入足球之后,足球就可以和靠近它的智能手机中的App进行对接,拥有权限者可以解锁足球内芯片的数据,查看该球的运动轨迹,甚至是研究球员的射门技巧。
2018年TI杯大学生电子设计竞赛G题:简易数字信号时序分析装置(高职高专)1.任务设计一个数字信号时序分析装置,可在示波器(X-Y模式)上同时显示8路数字信号时序,装置的系统组成如图1所示。
跳接线图1 设计作品系统组成2.要求(1)设计制作8位数字信号发生电路,可产生8位并行移位循环输出的TTL 电平信号,TTL电平的外输入移位时钟clock信号频率为100kHz,D0 ~ D7循环输出的时序波形如图2。
(20分)(2)设计制作数字信号时序分析装置,通过键盘预置8位单级触发字TW ,满足触发条件(即D 0 ~ D 7刚好为预置的TW )时,可在示波器上不重叠地自左至右同时显示8路数字信号1个移位循环周期的时序波形。
(30分)(3)8路数字信号时序波形的触发时间位置可调,可分别选择“触发开始跟踪”、“中心触发”和“触发终止跟踪”三种方式(即触发字的时间位置可分别选在示波器屏幕的左侧、中间和右侧)。
(15分)(4)在示波器屏幕上添加可手动位移的时间标志线(屏幕上的竖亮线),并用8个LED 显示时间标志线对应时刻的8路数字信号的状态字SW (状态1时LED 点亮、状态0时LED 熄灭)。
(15分)(5)在触发字时刻,分析装置对8路数字信号的逻辑状态开始采集与存储,并可在示波器上回放2个移位循环周期的8路数字信号时序波形。
(10分)(6)其他 (10分) (7)设计报告 (20分)项 目主要内容满分 方案论证 比较与选择,方案描述。
3 理论分析与计算 系统相关参数设计5 电路与程序设计系统组成,原理框图与各部分电路图,系统软5D 0 D 1 D 2 D 3 D 4 D 5 D 6 D 710µs移位循环周期80µs图2 数字信号发生电路循环输出时序波形3.说明(1)8路数字信号发生电路输出与时序分析装置输入端D0 ~ D7之间采用跳线连接,供设计作品测试时可能颠倒输入接线顺序使用。
基于Kinect深度信息的动态手势识别
郭晓利;杨婷婷;张雅超
【期刊名称】《东北电力大学学报》
【年(卷),期】2016(036)002
【摘要】针对复杂动态手势识别问题,本文首先通过体感传感器Kinect获取人体深度图像,利用阈值分割法分割出手势深度图像,然后建立由隐马尔可夫模型( HMM)和模糊神经网络( FNN)相结合的HMM-FNN模型进行动态手势识别。
本文的动态手势主要是针对虚拟变电站中对设备的常用操作手势来进行人机交互研究的。
HMM-FNN模型将复杂动态手势特征分解为三个子特征序列,分别建立HMM模型,然后进行模糊推理对手势进行分类识别。
经实验验证,HMM-FNN模型能快速有效识别复杂动态手势,且鲁棒性强,识别效果明显优于HMM模型。
【总页数】5页(P90-94)
【作者】郭晓利;杨婷婷;张雅超
【作者单位】东北电力大学信息工程学院,吉林吉林132012;东北电力大学信息工程学院,吉林吉林132012;国网吉林省电力有限公司吉林供电公司,吉林吉林130021
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于Kinect深度信息的手势识别 [J], 王艳;张奇志
2.基于Kinect传感器深度信息的动态手势识别 [J], 陶丽君;李翠华;张希婧;李胜睿
3.基于Kinect深度信息的手指检测与手势识别 [J], 郑斌珏;赵辽英;王毅轩;
4.基于深度信息的动态手势识别综述 [J], 陈甜甜;姚璜;左明章;田元;杨梦婷
5.基于Kinect的动态手势识别研究 [J], 邵天培;蒋刚;留沧海
因版权原因,仅展示原文概要,查看原文内容请购买。
数维杯国际赛历年赛题
以下是数维杯国际赛历年赛题的一些例子:
2017年数维杯国际赛题:《手写字识别》
要求参赛选手开发一个系统,能够识别手写的数字。
任务包括:收集和预处理训练数据集、设计一个识别算法、训练和测试模型、评估模型性能等。
参赛选手需要提交一个完整的系统,包括源代码、模型和相关实验结果。
2018年数维杯国际赛题:《电子商务评论情感分析》
要求参赛选手开发一个系统,能够自动分析电子商务网站上的用户评论,判断评论的情感极性(正面、负面或中性)。
任务包括:收集和预处理评论数据集、设计一个情感分析算法、训练和测试模型、评估模型性能等。
参赛选手需要提交一个完整的系统,包括源代码、模型和相关实验结果。
2019年数维杯国际赛题:《图像物体识别》
要求参赛选手开发一个系统,能够识别图像中的物体。
任务包括:收集和预处理图像数据集、设计一个物体识别算法、训练和测试模型、评估模型性能等。
参赛选手需要提交一个完整的系统,包括源代码、模型和相关实验结果。
以上只是数维杯国际赛历年赛题的一些例子,具体赛题可能因不同年份而有所不同。
2018年TI杯大学生电子设计竞赛手势识别装置(D题)
2018年7月23日
手势识别装置(D题)
【本科组】
摘要
手势识别作为人机交互的重要组成部分,其研究发展影响着人机交互的自然性和灵活性。
为了满足手势识别的设计要求,本次设计使用以测量电路为核心的系统。
主要由五个模块组成,包括测量电路模块、传感器模块、显示模块、控制模块、电源模块组成。
控制模块采用的是独立按键和MSP430F5529单片机,用以控制工作模式(训练和判决);测量电路模块采用的是MSP430F5529单片机;传感器模块采用的是FDC2214电容传感器;显示模块采用12864LCD液晶显示屏;电源模块采用220V转5V的USB接口输出模块。
本装置通过FDC2214电容传感器和MSP430F5529单片机测量频率值,再通过频率值判断手势,并显示在LCD液晶显示屏上。
关键词:手势识别MSP430F5529FDC2214 12864LCD
目录
一、系统方案 (1)
1.测量电路模块的选择 (1)
2.显示模块的选择 (1)
3.传感器模块 (1)
4.电源模块 (2)
5.方案确定 (2)
二、理论分析与计算 (2)
1.理论分析 (2)
2.计算 (2)
三、电路与程序设计 (3)
1.电路设计 (3)
(1)系统总体框图 (3)
(2)控制模块系统框图 (4)
2.程序设计 (4)
(1)程序流程图 (4)
(2)判决的流程图 (4)
四、测试方案与测试结果 (5)
1.测试方案 (5)
(1)硬件测试 (5)
(2)软件仿真测试 (5)
(3)硬件软件联调 (5)
2.测试条件与仪器 (5)
五、测试结果 (6)
1.测试结果 (6)
2.误差分析 (6)
六、心得 (6)
七、参考文献 (7)
附录:电路原理图 (8)
一、
一、系统方案
本设计主要由五个模块包括测量电路模块、传感器模块、显示模块、控制模块、电源模块。
1. 测量电路模块的选择
方案一:采用MSP430系列单片机
MSP430系列单片机采用1.8~3.6V电压,超低功耗,运行速度快,处理能力强大,具有高效的开发环境。
MSP430系列单片机中CPU与模拟设备的结合,使得校准、调试都变得非常方便。
[1]
方案二:采用51系列单片机
51系列单片机应用最广泛的8位单片机比较容易上手,有较为完善的按位操作系统,功能较完备。
虽然 I/O 脚使用简单,但高电平时无输出能力,有些功能增加了硬件和软件的负担,运行速度过慢,保护能力很差,容易烧坏。
通过比较,我们选择方案一,采用MSP430F5529单片机作为控制模块。
2. 显示模块的选择
方案一:采用OLED液晶显示屏
OLED液晶显示屏抗震性能更好;视角范围大;响应速度快;发光效率高,功耗低;厚度可以小于1毫米,并且重量轻;成本低;但是寿命较短。
方案二:采用LCD液晶显示屏
LCD液晶显示屏显示信息量大,显示质量高,低电压低功耗;使用寿命较长。
通过比较,我们选择方案二,采用LCD液晶显示屏作为显示模块。
3. 传感器模块
我们采用FDC2214作为传感器。
利用FDC2214的工作原理可实现手势接近和识别的功能,如图1.1所示,黄色部分称为“FDC2214的传感平面”,该平面为导体材质,当人手接近该平面时,传感端的电容发生了变化,这就会导致LC电路振荡频率的变化,从而反映出手势接近,以及手势的判定。
图1.1 传感器模块设计图
4. 电源模块
采用220V转5VUSB接口输出的接线板作为电源模块。
5. 方案确定
本设计采用5V电源给MSP430F5529单片机和FDC2214电容传感器供电。
MSP430F5529单片机外接按键,来控制工作模式。
MSP430F5529单片机外接FDC2214电容传感器,获取频率值,再通过频率值判断手势,并通过LCD液晶显示屏显示。
二、理论分析与计算
1.理论分析
传感平面的面积越大、手势与传感平面的距离越小,感应的频率变化越大,系统会越灵敏,但同时也可能引入越多的噪声。
2.计算
图2.1 被测电容器与LC电路图
设被测电容器的容抗为X C1,LC 电路中电容器的容抗为X C ,LC 电路中电感器的感抗为X L ,频率为f 。
根据振荡电路的条件有:容抗等于感抗。
即 X C1+X C =X L (2.1)
式中X C1=1/(2πfC 1),X C =1/(2πfC ),X L =2πfL ,其中C1为被测电容、C 为电容器电容、L 为电感器的电感。
因此可得
1
f 42
21-=LC C
C π (2.2) 可见,在芯片每个检测通道的输入端连接一个电感和电容,组成LC 电路,被测电容传感端(图3.1中灰色标识部分即为被测电容)与LC 电路相连接,将产生一个振荡频率,根据该频率值可计算出被测电容值。
三、电路与程序设计
1. 电路设计
(1)系统总体框图
图3.1 系统原理图
(2)控制模块系统框图
图3.2 控制模块原理图2.程序设计
(1)程序流程图
图3.3 测量电路程序流程图
图3.4 控制电路程序流程图(2)判决的流程图
图3.5 判决的流程图
根据设计要求,手势不同,测量电路能根据FDC2214传回的数据,与没有手势时的数值比较,CH1—CH6数值变化个数为z,CH7数值变化个数为x。
当x=1时,z等于0、1、2、3、4、5对应的手势分别为石头、1、2/剪刀、3、4、5/布。
当x=0时,表示没有手势输入。
四、测试方案与测试结果
1. 测试方案
(1)硬件测试
检查各个螺丝接口和硅胶黏合物件是否连接牢固、电路焊接口有无虚焊现象。
(2)软件仿真测试
通过CCS软件进行程序编译,检查有无程序上的编译或语法错误。
再通过软件进行仿真,检查是否达到预期结果。
(3)硬件软件联调
硬件测试和软件仿真测试完成并达到测试标准后,将程序写到单片机,测试并记录5组相同的手势的判决结果和每一次的判决时间,并计算判决的准确率(百分比)以及平均时间。
2.测试条件与仪器
测试条件:5V电源供电。
测试仪器:秒表。
五、测试结果
1.测试结果
表5.1 判断结果表
2.误差分析
手掌放置的位置不对是引起误差的主要来源。
手掌放置的位置不对,导致通道测出的频率值异常,从而导致测出的结果出错。
六、心得
经过四天三夜的努力奋斗,从最初的选材,到对材料进行切割、焊接、钻孔等加工,再到程序的编写调试。
小组三人齐心协力,克服了设计中的种种问题。
本次设计使用到的单片机MSP430F5529对于我们来说是一个比较熟悉的单片机,也就相对的容易上手。
而反观FDC2214未曾接触过,所以显得陌生,经过这些天的学习也掌握了它的使用方法,这让我们收获十分巨大。
对于一些元器件的使用也更加的熟练,本次设计全方面的考验了小组的配合能力,从硬件到软件再到报告,小组三人相互配合协作,使我们三人都能在这些方面上有所提高。
七、参考文献
[1]郑煊,刘萌,张鹍.MSP430单片机应用技术[M].北京:清华大学出版社,2014.
[2]吴建平.传感器原理及应用[M].北京:机械工业出版社,2009.
[3]肖志红.平板式电容传感器测量电路研究[J].现代电子技术,2004(17):105-106+108.
[4]蒙文舜,杨运经,刘云鹏.电容传感器的原理及应用[J].现代电子技术,2003(07):78-81.
[5]陈晓东,苏宛新,邢忠宝,王化龙.基于单片机的OLED显示器的应用[J].微计算机信
息,2006(05):5-6+82.
[6]路凯,李小坚.手势识别研究概述[J].西安文理学院学报(自然科学版),2006(02):91-94.
附录:电路原理图
1.系统总体原理图
图8.1 系统总体原理图
2.FDC2214电容传感器
图8.2 FDC2214电容传感器原理图
3.MSP430F5529单片机
图8.3 MSP430F5529单片机原理图4.12864LCD液晶显示屏
图8.4 12864LCD液晶显示屏。