第四章 汽车的制动性.
- 格式:doc
- 大小:248.00 KB
- 文档页数:8

2第一章汽车的动力性1.1试说明轮胎滚动阻力的定义,产生机理和作用形式。
定义:汽车在水平道路上等速行驶时受到的道路在行驶方向上的分力称为滚 动祖力。
2)产生机理:由于轮胎内部摩擦产生弹性轮胎在硬支律路面上行驶时加载 变形曲线和卸载变形曲线不重合会有能全损失, 即弹性物质的迟滞损失。
这种迟滞损失表现为一种阻力偶。
当车轮不滚动时,地面对丰轮的法向反作用力的分布是前后对称的;当 车 轮滚动时,由于弹性阻滞现象,处于压缩过程的前部点的地面法向反作用力就会 大于处于压缩过程的后部点的地面法向反作用力,这样,地面法向反作用力的分 布前后不对称,而使他们的合力F Z 相对于法线前移一个距离a ,它随弹性迟滞损 失的增大变大。
即滚动时有滚动阻力偶 T f = F z.?a 阻碍车轮滚动。
3]作用形式:T f = Wf ,T f = T f /r1.2滚动阻力系数与哪些因素有关? 答:滚动阻力系数与路面的种类、 行驶车速以及轮胎的构造、材料和气压有关。
1.3①=T5 +氓环侖一 244倍护十40 一沁金F TX44宣命13.解苦:1)(取四裆为銅)由眞—TqTq —^n >=> 巧一u —> nO.3 77rn行我阻力为幵■!■凡:=494.312+0.13U2由计算机作图有:幾本毬也可采用滞点法做圏:由发动就韓速雇口丽=fSOO/mim =4000/min ,职六个点分別我.人公式:2)⑴駅舟车速:有耳二丹+吒^>7; =494,312 + 0.13 1TJ? 分别代入S 和百公孔:T. *6.9*5^3*0.850377*03691h ,*=494312+013 K ———-——『弓 5,83*6.09⑵載大爬坡度:挂T 档时速度慢,Fw 吁怂略:100009000rac700060005D *4003000200010000367把耳的拟和公或也代入可得: n>4000 而 n max = 400()r/mm二 % =山377 ^0367*4^00 = 04.93 Km/hL0*5.^可I10 2D 30 JO 50 Ua(Km^h)喊廿打行帥羽卄平誓图=>耳=Emk(Ff +凡) nG心耳唤-0 n= 1 440-0.0 1=0.366L _ dr白 du gQT> — 于、U 时,= 1 + —瓦[» + —m r tnI 〕 l 1.798+3占98 卜 I 0.218*二0竽 *5^3^ *0启5 _ +IS(H)__t!36f + 38OO-1.12R耳 _ TJ3咕我IZ 存侖皿钟侖尸十和胸侖7阿孟由以上关系可由计算机作出图为;②用计算机求汽车用用档起步加速至70km/h 的加速时间*(3)克服策坡度时相应的附着辜评=」忽唯空气醜力樹滚动阻力得:Fi9 ・ ----- N___耳 all a19473)⑴缕制汽车行驶加速倒数曲戢(巴装货):40.0626U 0,366*3,2—— ---------------- —t J.o036/{注:栽雳时汽羣制U档起步加速不能至^Okm/h)由适动学可知:dt = — dua—t —[ -L/u —Aa]即加建时间可用计算机进行机分计算农出,且二一叫曲銭下两速皮间的画<1 欷就足通it此速度去件的加速时间。



第4章 汽车的制动性 学习目标通过本章的学习,要求掌握制动性的评价指标;掌握制动时汽车的受力情况以及地面制动力、制动器制动力与地面附着力之间的关系;掌握汽车制动距离的概念和计算方法;能对制动跑偏和制动侧滑进行正确的受力分析和运动分析;熟练分析前、后制动器制动力具有固定比值的汽车在各种路面上的制动过程;了解自动防抱死系统的原理。
为了保障汽车行驶安全和使汽车的动力性得以发挥,汽车必须具有良好的制动性。
对于行车制动而言,汽车的制动性能是指汽车行驶时,能在短距离内停车且维持行驶方向稳定,在下长坡时能维持较低车速的能力。
汽车的制动性是汽车的主要性能之一。
制动性直接关系到交通安全,重大交通事故往往与制动距离太长、紧急制动时发生侧滑等情况有关,故汽车的制动性是汽车行驶的重要保障。
改善汽车的制动性始终是汽车设计制造和使用部门的重要任务。
节 制动性的评价指标制动性主要用以下三方面指标来评价:4.1.1 制动效能。
包括制动减速度、制动距离、制动时间及制动力等。
制动效能是指在良好路面上,汽车以一定初速制动到停车的制动距离或制动时汽车的肩速度。
它是制动性能最基本的评价指标。
4.1.2 制动效能的恒定性。
包括抗热衰退和水衰退的能力。
汽车高速行驶或下长坡连续制动时制动效能保持的程度,称为抗热衰退性能。
因为制动过程实际上是把汽车行驶的动能通过制动器吸收转换为热能,所以制动器温度升高后,能否保持在冷状态时的制动效能已成为设计制动器时要考虑的一个重要问题。
此外,涉水行驶后,制动器还存在水衰退问题。
4.1.3 制动时的方向稳定性。
指制动时汽车按照驾驶员给定方向行驶的能力,即是否会发 生制动跑偏、侧滑和失去转向能力等。
制动时汽车的方向稳定性,常用制动时汽车按给定路径行驶的能力来评价。
若制动器发生跑片、侧滑或失去转向能力,则汽车将偏离原来的路径。
节 制动时车轮受力 4.2.1 制动器制动力在轮胎周缘克服制动器摩擦力矩μT (N ·m)所需的力,称为制动器制动力,用μF (N)表示,显然rT F μμ=式中 r ——车轮半径(m)。
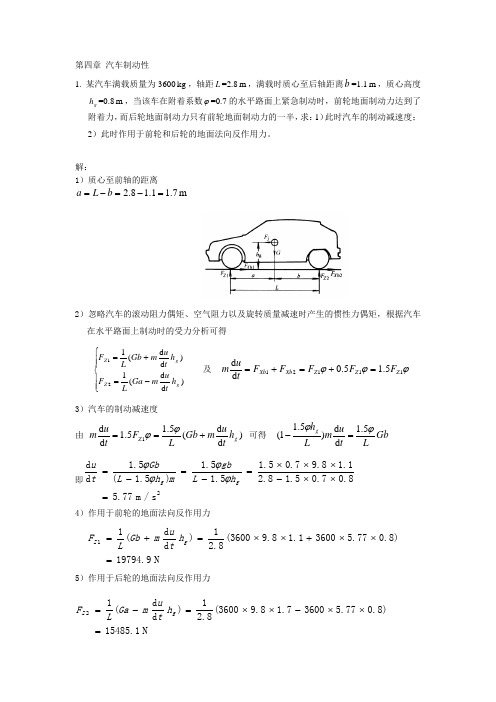
第四章4.1 一轿车驶经有积水层的—良好路面公路,当车速为100km/h 时要进行制动。
问此时有无可能出现滑水现象而丧失制动能力?轿车轮胎的胎压为179.27kPa 。
答:假设路面水层深度超过轮胎沟槽深度估算滑水车速:i h p 34.6=μ i p 为胎压(kPa ) 代入数据得:89.84=h μkm/h 而h μμ>故有可能出现滑水现象而失去制动能力。
4.2在第四章第三节二中.举出了CA700轿车的制动系由真空助力改为压缩空气助力后的制动试验结果。
试由表中所列数据估算''2'221ττ+的数值,以说明制动器作用时间的重要性。
提示:由表4-3的数据以及公式max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ计算''2'221ττ+的数值。
可以认为制动器起作用时间的减少是缩短制动距离的主要原因。
4.3一中型货车装有前、后制动器分开的双管路制功系,其有关参数如下; 1)计算并绘制利用附着系数曲线与制动效率曲线。
2)求行驶车速30km/h ,在.0=ϕ80路面上车轮不抱死的制动距离。
计算时取制动系反应时间s 02.0'2=τ,制动减速度上升时间s 02.0''2=τ。
3)求制功系前部管路损坏时汽车的制功距离,制功系后部管路损坏时汽车的制功距离。
答案:1)前轴利用附着系数为:gf zh b z L +=βϕ后轴利用附着系数为:()gr zh a zL --=βϕ1空载时:gh b L -=βϕ0=413.0845.085.138.095.3-=-⨯0ϕϕ> 故空载时后轮总是先抱死。
由公式()Lh La zE g r rr /1/ϕβϕ+-==代入数据rr E ϕ845.0449.21.2+=(作图如下)满载时:gh b L -=βϕ0=4282.017.1138.095.3=-⨯0ϕϕ<时:前轮先抱死Lh Lb zE g f ff //ϕβϕ-==代入数据f E =fϕ17.1501.11-(作图如下)0ϕϕ>时:后轮先抱死()Lh La zE g r rr /1/ϕβϕ+-==代入数据r E =rϕ17.1449.295.2+(作图如下)2)由图或者计算可得:空载时 8.0=ϕ制动效率约为0.7因此其最大动减速度g g a b 56.07.08.0max =⨯=代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ g56.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==6.57m 由图或者计算可得:满载时 制动效率为0.87 因此其最大动减速度g g a b 696.087.08.0max'=⨯=制动距离max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ g 696.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==5.34m 3) A.若制动系前部管路损坏 Gz dt dug G F xb ==2 )(2g z zh a LGF -=⇒后轴利用附着系数g r zh a Lz-=ϕ⇒后轴制动效率Lh La zE g r rr /1/ϕϕ+==代入数据得:空载时:r E =0.45满载时:r E =0.60a)空载时 其最大动减速度g g a b 36.045.08.0max =⨯= 代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ g36.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==10.09mb)满载时 其最大动减速度g g a b 48.06.08.0max =⨯= 代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ g48.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==7.63mB .若制动系后部管路损坏 Gz dt dug G F xb ==1 )(1g z zh b LGF +=⇒前轴利用附着系数 gf zh b Lz+=ϕ⇒前轴制动效率Lh Lb zE g f ff /1/ϕϕ-==代入数据 空载时:f E =0.57 满载时:f E =0.33a)空载时 其最大动减速度g g a b 456.057.08.0max =⨯= 代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττ g456.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==8.02mb)满载时 其最大动减速度g g a b 264.033.08.0max =⨯= 代入公式:max202292.2526.31b a a a u u s +⎪⎭⎫ ⎝⎛''+'=ττg264.092.253030202.002.06.312⨯+⨯⎪⎭⎫ ⎝⎛+==13.67m4.4在汽车法规中,对双轴汽车前、后轴制功力的分配有何规定。
说明作出这种规定的理由? 答:为了保证制动时汽车的方向稳定性和有足够的制动效率,联合国欧洲经济委员会制定的ECE R13制动对双轴汽车前、后轮制动器制动力提出了明确的要求。
我国的行业标准ZBT240007—89也提出了类似的要求。
下面以轿车和最大总质量大于3.5t 的货车为例予以说明。
法规规定:对于8.0~2.0=ϕ之间的各种车辆,要求制动强度 )2.0(85.01.0-+≥ϕz车辆在各种装载状态时,前轴利用附着系数曲线应在后轴利用附着系数曲线之上。
对于最大总质量大于3.5t 的货车,在制动强度3.0~15.0=z 之间,每根轴的利用附着系数曲线位于08.0±=z ϕ两条平行于理想附着系数直线的平行线之间;而制动强度3.0≥z 时,后轴的利用附着系数满足关系式)38.0(74.03.0-+≥ϕz ,则认为也满足了法规的要求。
但是对于轿车而言,制动强度在0.3~0.4之间,后轴利用附着系数曲线不超过直线05.0+=z ϕ的条件下,允许后轴利用系数曲线在前轴利用附着系数曲线的上方。
4.5一轿车结构参数问题1.8中给出的数据一样。
轿车装有单回路制动系,其制功器制动力分配系数65.0=β。
试求:1)同步附着系数。
2)在7.0=ϕ路面上的制动效率。
*3)汽车此时能达到的最大制动减速度(指无任何车轮抱死时)f 。
4)若将设车改为双回路制动系统(只改变制动的传动系,见习题图3),而制动器总制动力与总泵输出管路压力之比称为制功系增益,并令原车单管路系统的增益为G '。
确定习题图3中各种双回路制动系统以及在一个回路失效时的制动系增益。
5)计算:在7.0=ϕ的路面L 。
上述各种双回路系统在一个回路失效时的制功效率及其能达到的最大制功减速度。
6)比较各种双回路系统的优缺点。
答案:1)同步附着系数8.063.025.165.07.20=-⨯=-=g h b L βϕ 2)因7.0=ϕ0ϕ< 所以前轮先抱死 Lh Lb zE g f f f //ϕβϕ-== 7.0=f ϕ=7.2/63.07.065.07.2/25.1⨯-=0.9513)最大制动减速度:max b a =2/53.67.0s m g E f =⨯⨯4)T'u F G =65.0=βa) 1失效''227.0)1(221)1(G G T F T F uu =-=-=ββ2失效''113.1221G G T F T F uu ===ββb)1失效'2121G T F u =2失效'2121G T F u =c) 1失效'2121G T F u =2失效'2121G T F u =5)a)1失效Gz dtdug G F xb ==2 )(2g z zh a LGF -=⇒后轴利用附着系数gr zh a Lz-=ϕ⇒后轴制动效率L h La zE g r rr /1/ϕϕ+===⨯+=7.2/63.07.017.2/45.10.46最大动减速度g g a b 32.046.07.0max =⨯=2失效Gz dtdug G F xb ==1)(1g z zh b LGF +=⇒前轴利用附着系数 gf zh b Lz+=ϕ⇒前轴制动效率Lh Lb zE g f ff /1/ϕϕ-===⨯-=7.2/63.07.017.2/25.10.55 最大动减速度g g a b 39.055.07.0max=⨯=b)由第2)问 知:前轮先抱死 1失效与2失效情况相同。
Gz dtdug G F xb ββ==1 )(1g z zh b LGF +=⇒前轴利用附着系数 gfzh b Lz+=βϕ⇒前轴制动效率Lh L b zE g f ff //ϕβϕ-===7.2/63.07.065.07.2/25.1⨯-=0.95 最大动减速度g g a b 33.02195.07.0max =⨯⨯= c) 与b )回路的情况相同。
6) 比较优缺点:a ) 其中一个回路失效时,不易发生制动跑偏现象。
但当1失效时,容易后轮先抱死,发生后轴测滑的不稳定的危险工况。
b ) 实现左右侧轮制动器制动力的完全相等比较困难。
c ) 实现左右侧轮制动器制动力的完全相等比较困难。
其中一个管路失效时,极容易制动跑偏。