被动定位算法研究
- 格式:pdf
- 大小:111.07 KB
- 文档页数:6
无线传感网信号被动定位关键技术研究无线传感网信号被动定位关键技术研究引言无线传感网(Wireless Sensor Network, WSN)是由大量分布在目标区域的自主传感器节点组成的网络系统。
传感器节点具备感知、处理和通信能力,能够实时收集环境信息并传输给监控中心。
无线传感网信号被动定位是无线传感网中的一个重要问题,通过分析被动接收的信号,可以利用多普勒效应、信号时延以及信号强度等信息,实现对目标的准确定位。
本文将重点探讨无线传感网信号被动定位的关键技术。
一、多普勒效应原理多普勒效应是指当天线与目标物相对运动时,信号频率发生变化的现象。
利用多普勒效应进行被动定位的方法被称为多普勒定位。
在无线传感网中,传感器节点通常通过接收目标发出的信号来感知目标的位置。
当目标与传感器节点之间存在相对运动时,接收到的信号频率将发生改变。
通过测量信号频率的变化,结合目标与传感器节点之间的相对速度,可以推算出目标的位置信息。
二、信号时延测量技术信号时延测量是无线传感网信号被动定位中的另一个关键技术。
当目标发出信号后,时间延迟是信号从目标到传感器节点所需的时间量。
利用时间延迟进行被动定位的方法被称为时延定位。
传感器节点可以通过记录信号抵达时间的差异,计算出目标与传感器节点之间的距离,并进一步推算出目标的位置。
三、信号强度定位技术信号强度定位是通过测量接收到的信号强度来实现被动定位的一种方法。
在无线传感网中,信号强度通常是以接收到的信号功率来衡量的。
目标与传感器节点之间的距离越近,接收到的信号功率越大;距离越远,信号功率越小。
因此,通过测量接收到的信号功率,可以推断目标与传感器节点之间的距离和位置。
四、信号融合与算法优化在无线传感网信号被动定位中,通常会采用多种技术进行融合,以提高定位精度。
信号融合可以有效地利用多个传感器节点所接收到的信息,对目标进行更准确的位置推算。
此外,为了进一步优化定位算法,还需要考虑目标移动速度、传感器节点分布、传感器节点位置误差等因素,对算法进行优化和改进,提高定位的精度和鲁棒性。
多径时延估计及被动定位基本问题研究的开题报告1. 研究背景和意义在现代定位技术中,利用多径时延估计和被动定位算法可以实现目标物体的准确定位。
多径时延估计是指利用信号在传播过程中存在的多条路径(多径)来估计信号传输的时间延迟,从而确定信号源的位置。
而被动定位算法则是通过接收信号的方向信息,即信号到达接收器的方向角度,来推断信号源的位置。
多径时延估计和被动定位算法在无线通信、雷达探测、声呐定位等领域有着广泛的应用。
例如,在移动通信系统中,多径时延估计可以用于卫星导航、蜂窝网络及无线定位系统;在军事领域中,多路径时延估计和被动定位算法则广泛应用于雷达探测、火箭导航和机器人等。
本研究的意义在于深入研究多径时延估计和被动定位算法,探索其基本问题,并解决实际应用中的关键问题,为现代定位技术的研究和应用提供更可靠的理论基础和实践指导。
2. 研究内容和目标本研究的基本问题包括多径时延估计中的多径信号分离和多路径组合,以及被动定位算法中的方向角度测量和定位算法设计。
具体而言,研究内容包括:(1)多径信号分离:通过解决多径信号混叠问题,找到正确的多径信号并将其与目标物体的位置相联系。
(2)多路径组合:通过多径信号的组合计算,确定目标物体的位置,并提高定位精度。
(3)方向角度测量:利用多个接收器接收信号,并通过信号到达的方向角度来确定信号源的位置。
(4)定位算法设计:设计合适的理论模型和算法,并使用实际数据进行仿真和测试,验证算法的有效性和可靠性。
本研究的目标是建立多径时延估计和被动定位算法的理论框架和应用方法,提高定位精度和可靠性,为实际应用提供更好的支持和指导。
3. 研究方法和技术路线本研究将采用的主要研究方法和技术路线包括:(1)理论分析:通过理论计算和分析,研究多径时延估计和被动定位算法的基本问题和解决方法。
(2)仿真测试:使用MATLAB软件进行模拟仿真,生成实验数据,并进行算法测试和验证。
(3)实际测试:在实际场景下,进行实际测试和数据采集,验证算法的实际应用效果。

TDOA 被动定位方法及精度分析Ξ杨林周一宇孙仲康(国防科技大学电子工程学院长沙 410073摘要本文提出了一种利用多站 TDOA 信息对辐射源定位的非线性方程组求解方法 , 该方法简洁准确 , 无需作迭代运算 , 计算量小。
文中给出了该定位方法的精度分析 , 最后给出了在具体布站条件下的受控区域内的 GDO P 分布。
关键词无源定位 , TDOA , 时差定位 , 精度分析 , GDO P 分类号 TN 953. 7T DOA Pa ssive L oca tion Yanglin (In stitu ic , D T , Changsha , 410073Abstract , , , and com p u tati onally effcien t so lu ti on of non linear equati on of em po siti on based on the ti m e differences of arrival (TDOA m ea 2su red by lti on is p ropo sed in th is p ap er . T he accu racy analysis of the locati on m ethod is also p resen ted . F inally p erfo rm ance evaluati on resu lts of em itter locati on by u sing TDOA info rm ati on are illu strated by som e grap h s of Geom etrical D ilu ti on of P recisi on (GDO P under vari ou s conditi on s in the sp ecific su rveillance regi on .Key words Passive L ocati on , TDOA , TDOA L ocati on , A ccu racy A nalysis , GDO P无源定位系统本身不发射电磁波 , 完全是被动工作的 , 因此具有隐蔽性好的优点 , 对于提高系统在电子战环境下的生存能力具有重要的作用 [1]。
第26卷第6期 水下无人系统学报 Vol.26No.62018年12月JOURNAL OF UNMANNED UNDERSEA SYSTEMS Dec. 2018收稿日期: 2016-11-19; 修回日期: 2016-12-18.基金项目: 国家重点研发计划(2016YFC1400200); 国家自然科学基金面上项目(61671388). 作者简介: 赵伟康(1995-), 男, 硕士, 主要研究方向为融合跟踪算法。
[引用格式] 赵伟康, 韩一娜, 杨益新, 等. 基于元启发算法的纯方位被动定位方法[J]. 水下无人系统学报, 2018, 26(6): 623-627.基于元启发算法的纯方位被动定位方法赵伟康1, 韩一娜1, 杨益新1, 刘清宇2(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 海军研究院, 北京, 100073)摘 要: 传统的最小二乘的纯方位被动定位方法虽然运算简单, 但是定位结果不够可靠。
基于此, 文中探究了利用元启发算法进行纯方位被动定位的可能性, 构建了相应的数学模型, 给出了具体的算法。
通过对比该方法与传统方法的效果, 同时对该方法在水声观测环境下的应用进行仿真, 得出该方法的定位效果相较传统的最小二乘定位方法有显著的优势。
关键词: 纯方位被动定位; 元启发算法; 最小二乘法中图分类号: O229; TP301.6 文献标识码: A 文章编号: 2096-3920(2018)06-0623-05 DOI: 10.11993/j.issn.2096-3920.2018.06.018Bearing-Only Passive Location Based on Meta-Heuristic AlgorithmZHAO Wei-kang 1, HAN Yi-na 1, YANG Yi-xin 1, LIU Qing-yu 2(1. School of Marine and Technology, Northwestern Polytechnical University, Xi’an 710072, China; 2. Naval Research Academy, Beijing 100073, China)Abstract: Because the traditional bearings-only passive location approach based on the least square method cannot give much reliable location result, this paper explores the possibility of solving bearing-only passive location problem via the meta-heuristic algorithm, builds a corresponding mathematical model, and deduces a specific algorithm. Moreover, applica-tion of this method in underwater acoustic observation environment is simulated, and compared with traditional method. The result indicates that this method can achieve much better localization effect, compared with the traditional least square based passive location method.Keywords: bearings-only passive location; meta-heuristic algorithm; least square method0 引言目前, 国内外应用元启发算法进行无线定位优化的研究主要集中在无线传感器网络(wireless sensor network, WSN)定位中, 文献[1]通过改进差分进化算法以适用于WSN 定位问题; 文献[2]利用差分进化算法改进距离无关(range-free)定位中典型的DV-Hop 算法; 文献[3]使用粒子群算法进行WSN 定位; 此外还有很多利用优化算法进行定位优化的研究[4-6]。
2012年第 4 期 声学与电子工程 总第 108 期基于ac-MVDR 高分辨算法的被动时反近场声源定位方法研究安丽娜 时胜国 何盼盼(哈尔滨工程大学水声技术重点实验室,哈尔滨,150001)摘要 为了克服多途效应对水下复杂结构声源的近场定位精度的影响,研究了基于幅度相位联合补偿的MVDR (ac-MVDR )算法的被动时反近场声源定位方法,该方法一方面将幅度补偿引入到MVDR 近场聚焦波束形成中,充分利用声场的幅度相位信息重建声源平面上的噪声源空间位置分布,实现高分辨定位;另一方面可综合多途信息,对信号进行空时被动聚焦的同时,在信道输出总能量强的目标处实现选择性聚焦。
通过仿真和实测数据的处理分析表明,该方法可有效的克服多途干扰,提高水下声源的近场定位精度。
关键词 多途;近场;幅度补偿;聚焦波束形成;定位;射线模型潜艇辐射噪声是影响潜艇隐身性能的关键因素之一。
为了有针对性的开展减振降噪措施,首要任务就是进行水下噪声源定位技术研究,查找各个噪声源的空间位置分布。
基于幅度相位联合补偿的ac-MVDR 聚焦波束形成算法是近场条件下的声源定位方法,其通过给出潜艇表面噪声源的分布图像来确定主要噪声源的位置。
针对浅海环境中多途效应干扰水下声源近场定位精度的问题,本文采用了基于ac-MVDR 算法的被动时反近场声源定位方法,该方法将在被动测量中获取物理时间反转镜技术的信道匹配效果,可有效克服多途对声图质量的影响,从而提高水下潜艇噪声源的近场定位精度。
1近场聚焦波束形成算法1.1原理近场聚焦波束形成是在近场条件下完成的波束形成,对基阵各阵元接收数据按照球面波规律进行时延或相位补偿,当补偿到声源所在的扫描点处时输出功率达到最大值,出现“聚焦”点,因此称为聚焦波束形成。
通常的扫描平面都是声源所在平面且与基阵所在平面相平行,若对扫描平面划分网格,则每一个网格对应的位置就是扫描点。
以均匀水平线阵为例,建立聚焦模型,示意图为图1。
*陈守稳顾尔顺(航天工业总公司二院二部北京100854)摘要对几种被动定位方法的定位精度进行了计算比较,选择了可行的定位方法,分析了影响定位精度的有关因素,并对其加以说明。
主题词被动定位,测向交会,纯时差,测向)测时差,定位精度1引言被动定位即无源定位,其特点是不能获得辐射源的距离信息,因此,必须采用多站测量对目标进行定位。
被动定位通常是利用单站的测角信息或多站测时差来完成,文中就测向交叉、测时差、测向)时差混合定位三种方法进行了定位误差的计算,对结果进行了分析并得到结论。
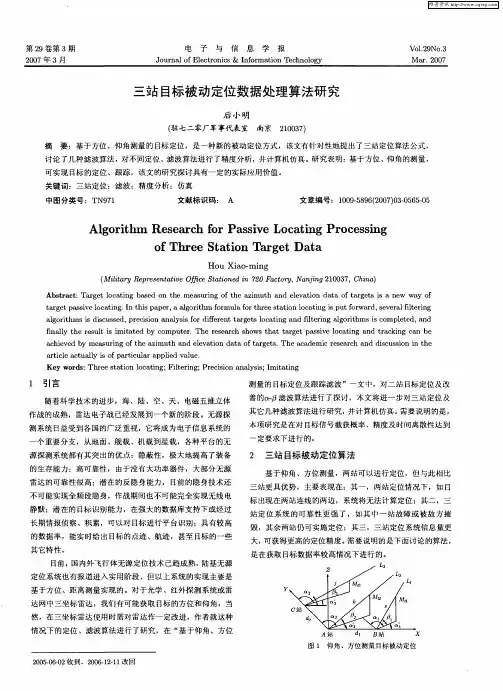
2被动定位算法模型211测向交叉定位法是指通过测量辐射源的到达角京国防工版社数运算确定目标位置。
以下推导中京均假设有N部雷达京在直版坐标系(x轴正东京y轴正北京z轴天顶)中站址分别为(x i京y i京z i)京i= 1京2京,京N京各雷达对辐射源测得的方位版和俯仰版是(B i京E i)。
假设已知1号站测得目标的角度(B1京E1)京i号站测得目标版度(B i京E i)京可利用下面几种方法求取R1。
方法1:R1=(x1-x i)sin B i-(y1-y i)cos B icos E1sin(B1-B i)(1)方法2:R1=(x1-x i)sin E i-(z1-z i)cos E i cos B isin E1cos E i cos B i-cos E1cos B1sin E1(2)*收稿日期:1998-05-28第26卷第5期现代防御技术1998年9月方法3:R 1=(y 1-y i )sin E i -(z 1-z i )cos E i sin B isin E 1cos E i sin B i -cos E 1sin B 1sin E i(3)方法4:可以利用前述的3种方法中的任一种京将式(1)、式(2)或式(3)中的全部下标1改成下标j 京即可计算出目标到j 号站的斜距R j 京然后利用下列公式即可求出R 1:x t =x j +R j cos E j cos B jy t =y j +R j cos E j sin B j z t =x j +R j sin E jR 1=[(x t -x 1)2+(y t -t 1)2+(z t -z 1)2]1/2(4)采用1号(-2813京-2813京0)京2号(2813京2813京0)的布站方式京比较方法1京2京3对空中各点的定位误差京取最小值京记录其对应的定位方法号码京各定位方法在xOy 平面的分布见图1京图例1京2京3分别对应定位方法1京2京3。
方法1中京目标高度10km 京测向精度015b 条件下京R R 1的等误差线在xOy 平面的分布见图2(单位:km )。
图1 最小误差对应的方法在xOy 平面的分布图 图2 xOy 平面R R 的等误差曲线由图1可以看出京采用同样的布站方式京绝大部分空间中方法1的定位精度高京只有很少一部分空间方法2和3的精度高京这一部分空间主要集中在两雷达站连线所在的垂直平面附近。
由图2可以看出京方法1中京由两站组成的单基线定位系统京其定位精度仅在一扇形区域内很高京基线所在垂直平面内及附近京定位精度迅速下降。
而且由式(1)知京B 1=B i 时京R 1无解。
为了在整个空域内能够对辐射源定位京可以采用3部雷达组成三角形布局。
根据以上分析可得到结论。
在测向交会法中京可以只选用方法1。
212 纯时差定位法对于三维空间的目标京至少需要4个测量站对目标定位。
以下假设主站坐标为(x 1京y 1京z 1)=(0京0京z 1)京其它3个副站的坐标分别为(x i 京y i 京z i )京(i =2京3京4)京目标位置坐标是(x i 京y i 京z i )京目标到各站的距离分别是R i (i =1京2京3京4)。
此系统可以测出目标到主站与其它3个附站的时间差$t 京对应的距离差如下:18 现代防御技术 第26卷$2=R1-R2$3=R1-R3$4=R1-R4(5)为了得到全空域均匀的误差分布京3条时差基线最好按Y型布局京即中心站(1号)在等边工版形的中心京其它3个副站位于倒三角形的3个顶端上。
21211等高纯时差定位法[1]设各雷达站处于同一高度京z i=0京(i=1京2京3京4)京则目标坐标计算公式如下:x t=12d22-$22y2-$2d23-$23y3-$3d24-$24y4-$4/Dy t=12x2d22-$22-$2x3d23-$23-$3x4d24-$24-$4/DR1=12x2y2d22-$22x3y3d23-$23x4y4d24-$24/DD=12x2y2-$2x3y3-$3x4y4-$4z t=R21-x2t-y2t(6)上面各式中京d2i=x2i+y22京(i=2京3京4)。
21212不等高纯时差定位法实际布站时京各站不可能完全在同一平面内京下面各式是考虑了各站高度不全是零时的目标位置坐标计算公式。
目标坐标位置的解析式表示为:x t=a x R1+b xy t=a y R1+b yz t=a z R1+b z z(7)式中:a x=$2y2-y1z2-z1$3y3-y1z3-z1$4y4-y1z4-z1/$19第5期陈守稳等:被动定位算法研究b x=A2y2-y1z2-z1A3y3-y1z3-z1A4y4-y1z4-z1/$a y=x2-x1$2z2-z1x3-z1$3z3-z1x4-x1$4z4-z1/$b y=x2-x1A2z2-z1x3-x1A3z3-z1x4-x1A4z4-z1/$a z=x2-x1y2-y1$2x3-x1y3-y1$3x4-x1y4-y1$4/$b z=x2-x1y2-y1A2x3-x1y3-y1A3x4-x1y4-y1A4/$$=x2-x1y2-y1z2-z1x3-x1y3-y1z3-z1x4-x1y4-y1z4-z1(8)上面各式中:A i=12(d2i-d21-$2i)(i=2京3京4)d2i=x2i+y2i+z2i(i京1京2京3京4)(9) R1的解由下式得到:R1=-B?B2-ACAA=a2x+a2y+a2z-1B=a x(b x-x1)+a y(b y-y1)+a z(b z-z1)C=(b x-x1)2+(b y-y1)2+(b z-z1)2(10)以等高纯时差为例京目标高度10km京测时精度011L s京R z等误差曲线在xOy平面分布见图3。
R z与目标俯仰版E的关系曲线见图4京图中曲线由下至上对应的参变量是目标斜距在xOy平面投影r=i*20km(i=1~20)。
由图3可以看出等高纯时差法的定位误差在方位平面内变化不大京且其精度比较高。
由图4可知京时差法的定位误差低仰版时变化很大京定位性能较差。
不等高时差法的定位误差受站址高度影响京主站的站址影响较3个副站大京若副站站址高度增加京则主副站连线所在垂直平面及附近误差增加京若主站高度增加京则两副站连线的垂线所在垂直平面及附近误差增加。
20现代防御技术第26卷3xOy平面R z等误差曲线图4xOy平面R z与俯仰版E关系曲线213则向)测时差混合定位法由于纯时差法低仰角定位性能较差京考虑采用测向)时差混合定位法京即主站测量目标高低版。
工基线混合交会法也由1个主站(1号)和3个副站(2号京3号京4号)组成京它们的站址分别为(x i京y i京z i)京i=1京2京3京4。
此系统可提供4个参数:E1京$2京$3京$4京目标位置解如下:x t=$x/$y t=$y/$z t=$z/$(11)式中:$=x1-x2y1-y2C1 x1-x3y1-y3C2 x1-x4y1-y4C3$x=D1y1-y2C1 D2y1-y3C2 D3y1-y4C3$y=x1-x2D1C1 x1-x3D2C2 x1-x4D3C3$z=x1-x2y1-y2D1x1-x3y1-y3D2x1-x4y1-y4D3(12)其中:21第5期陈守稳等:被动定位算法研究C 1=z 1-z 2+$2/sin E 1C 2=z 1-z 3+$3/sin E 1C 3=z 1-z 4+$4/sin E 1D 1=12(d 21-d 22+$22+2$2z 1sin E 1)D 2=12(d 21-d 23+$23+2$3z 1sin E 1)D 3=12(d 21-d 24+$24+2$4z 1sin E 1)d 2i =x 2i +y 2i +z 2i i =1京2京3京4(13)布站仍采用纯时差定位法中的方式京测向精度015b 京测时精度011L s。
R z与目标俯仰版E 的关系曲线见图5。
由图5可知京混合法的定位误差低仰版时变化均匀京精度比较高京而且混合法中对目标定位不必计算目标斜距R 1。
比较图4、图5可知京并不是工基线混合法的定位精度一定高于纯时差法京究竟采用哪一种方法获取较高的定位精度京要根据具体的测时、测版精度来确定。
3 结 束 语图5R z与俯仰版E 关系曲线经过以上分析京可以得到以下结论:(1)测向交会法的方法1、纯时差法、三基线混合法是可选的被动定位方法。
(2)定位精度与目标位置、测量站布局、站间距离、各种测量精度均有直接关系。
测量精度高京定位业度高京增加站间距也有助于提高定位精度。
(3)在方位平面内京纯时差法与工基线混合法能够在0~360b内进行定位京误差变化不大京在垂直平面内京纯时差法的定位精度随目标高低版变化显著京低仰版时京随目标斜距增大京定位误差迅速增大京而测向交会法与测向)测时差混合法的定位精度在低仰角时变化均匀。
应用中京要根据所需的具体要求京适当选取所需的定位方法。
参考文献1 斯科尔尼克M Ñ.雷达手册.第分册.北京:国防工业出版社京1978.22 现代防御技术 第26卷。