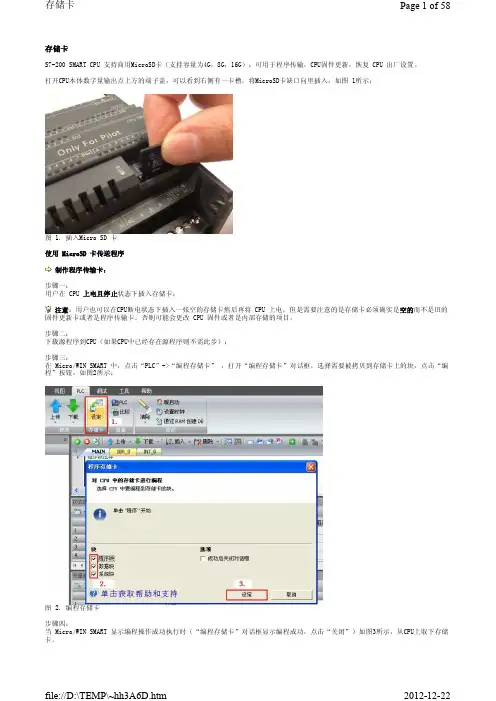
S7-200--SMART的功能指令讲解学习
- 格式:pptx
- 大小:1.49 MB
- 文档页数:49
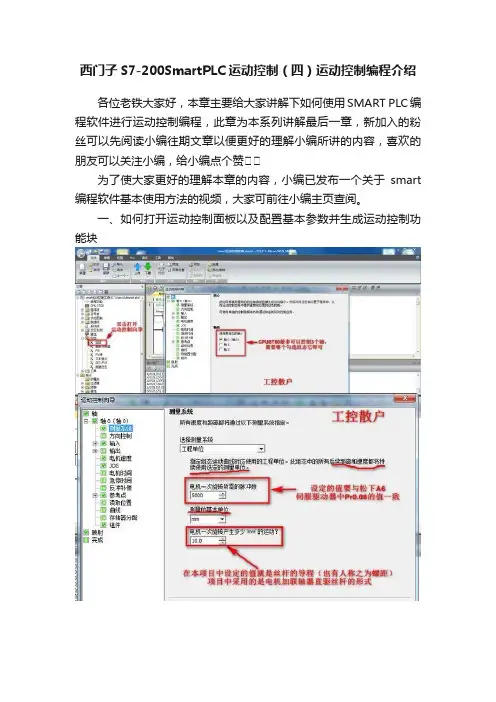
西门子S7-200SmartPLC运动控制(四)运动控制编程介绍
各位老铁大家好,本章主要给大家讲解下如何使用SMART PLC编程软件进行运动控制编程,此章为本系列讲解最后一章,新加入的粉丝可以先阅读小编往期文章以便更好的理解小编所讲的内容,喜欢的朋友可以关注小编,给小编点个赞❤❤
为了使大家更好的理解本章的内容,小编已发布一个关于smart 编程软件基本使用方法的视频,大家可前往小编主页查阅。
一、如何打开运动控制面板以及配置基本参数并生成运动控制功能块
二、运动控制常用功能块使用方法讲解
图中为运动控制编程作了非常详细的讲解,有疑问的朋友可以留言,小编会一一回复。
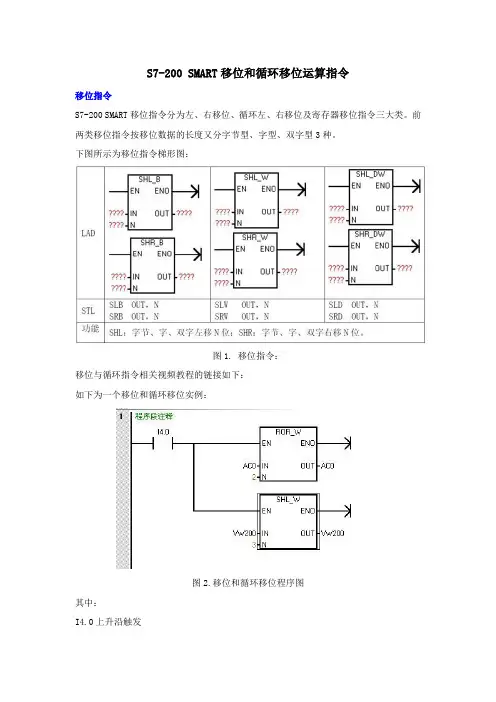
S7-200 SMART移位和循环移位运算指令
移位指令
S7-200 SMART移位指令分为左、右移位、循环左、右移位及寄存器移位指令三大类。
前两类移位指令按移位数据的长度又分字节型、字型、双字型3种。
下图所示为移位指令梯形图:
图1. 移位指令:
移位与循环指令相关视频教程的链接如下:
如下为一个移位和循环移位实例:
图2.移位和循环移位程序图
其中:
I4.0上升沿触发
FOR_W为字循环右移
SHL_W为字左移
其移位和循环移位的过程可由下图进一步说明:
图3.移位和循环移位过程说明图
For Next 循环
程序循环结构用于描述一段程序的重复循环执行。
由 FOR和NEXT指令构成程序的循环体。
FOR指令标记循环的开始,NEXT指令为循环体的结束指令。
图4.For Next 循环
其中:
INIT,FINAL分别定义起始值和结束值。
使能输入EN有效,循环体开始执行,执行到NEXT指令时返回,每执行一次循环体,当前值计数器INDX增1,达到终止值FINAL时,循环结束。
使能输入无效时,循环体程序不执行。
每次使能输入有效,指令自动将各参数复位。
注意:使用 FOR 和 NEXT 指令可在重复执行分配计数的循环中执行程序段。
每条 FOR 指令需要一条 NEXT 指令。
For Next 编程实例
图5.For Next 循环循环程序图
使用状态表监控程序的运行如下图所示
图6.状态监视图
如上表所示,VW100值为4, INDEX大于终止值,循环终止。
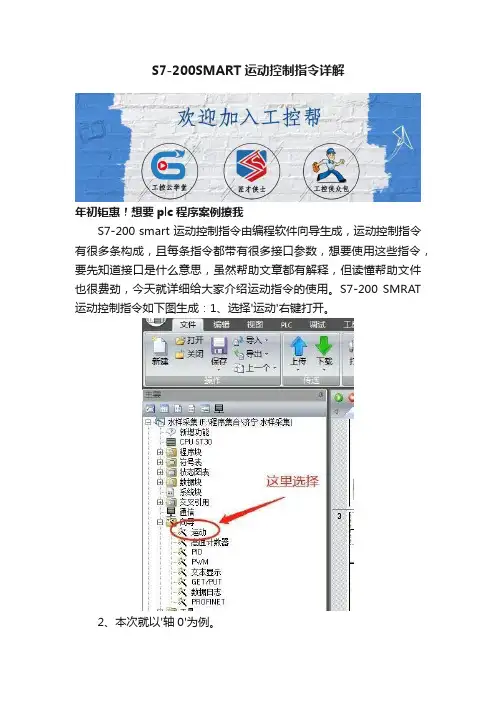
S7-200SMART运动控制指令详解年初钜惠!想要plc程序案例撩我S7-200 smart 运动控制指令由编程软件向导生成,运动控制指令有很多条构成,且每条指令都带有很多接口参数,想要使用这些指令,要先知道接口是什么意思,虽然帮助文章都有解释,但读懂帮助文件也很费劲,今天就详细给大家介绍运动指令的使用。
S7-200 SMRAT 运动控制指令如下图生成:1、选择'运动'右键打开。
2、本次就以'轴0'为例。
3、命个名字。
4、数字1位选择工程单位,可以使工程单位,也可以使用脉冲。
数字2是电机旋转一圈的脉冲量,我目前步进拨码设定是10000个脉冲旋转一周数字3是单位,根据自己需要设定数字4是电机旋转一圈的工程量,我设定的是360度,也就是说10000个脉冲对应360度。
5、方向控制,我是用的脉冲加方向,所以选择单项2轴。
6、正负极限根据需要设定,我这个没有正负极限就没有选择。
7、零电位使用,走绝对位置和相对位置之前一定要定义好原点,否则绝对位置和相对位置不运行。
8、0脉冲位置,也可以使用此点定义0点。
9、停止根据需要选择,通过阅读STP就能理解什么意思。
10、停止根据需要选择,通过阅读TRIG就能理解什么意思。
11、禁用根据需要选择,通过阅读DIS就能理解什么意思。
12、最大速度和最小速度根据现场情况设定,我设定最大速度为360度/秒。
13、JOG命令也就是手动运行,根据需要设定速度,建议设定小一些,看看运行速度再调整。
14、此处设定加减速时间,也就是脉冲输出的加减速时间,根据现场情况设定。
15、急停补偿。
16、反冲补偿,也就是校准丝杠间隙。
17、参考点设定18、找零点时速度和方向设定。
19、偏移量设定20、搜索参考点方式选择21、从驱动器中读取绝对位置22、曲线设定,我这里没用曲线,没有生成曲线。
23、点'建议'自动分配地址。
24、组件25、映射显示26、完成,点击生成就完成了。
【智】S7-200SMART运动控制指令详解带你启程!大家好,我是微控小智,今天又跟大家见面了。
学习需要坚持,做技术亦是如此,厚积才能博发。
小智写的程序都是进行反复测试过的,可以放心跟着操作,有疑问的地方可以留言。
S7-200SMART运动控制指令由编程软件向导生成,运动控制指令有很多条构成,且每条指令都带有很多接口参数,要想使用这些指令,先要知道接口是什么意思,虽然帮助文章都有解释,但读懂帮助文件也很费劲,那么今天,小智就来给大家介绍一下常用的S7-200SMART运动控制指令。
S7-200SMART运动控制指令向导如下图所示:1.启用并初始化轴AXISx_CTRL子程序(控制)启用和初始化运动轴,方法是自动命令运动轴每CPU更改为RUN模式时加载组态/曲线表。
在项目中只对每条运动轴使用此子程序一次,并确保程序会在每次扫描时调用此子程序。
使用SM0.0(始终开启)作为EN参数的输入。
管脚含义:MODE:启用模块。
1=可发送命令;0=中止进行中的任何命令Done:完成标志位Error:错误代码(字节)C_Pos:轴的当前位置(绝对定位或者相对定位),工程单位:Real型数据;相对脉冲:DINT型数据C_Speed:轴的当前速度,Real型数据C_Dir:轴的当前方向(1=反向,0=正向)2.手动控制轴AXISx_MAN子例程(手动模式)将运动轴置为手动模式。
这允许电机按不同的速度运行,或沿正向或负向慢进。
在同一时间仅能启用RUN、JOG_P或JOG_N输入之一。
管脚含义:RUN:1=轴手动运行(速度和方向分别由Speed和Dir管脚控制)0=停止手动控制JOG_P:1=正转点动控制JOG_N:1=反转点动控制Speed:RUN运行时的目标速度,Real型数据Dir:RUN运行时的方向Error:错误代码(字节)C_Pos:轴当前位置(绝对定位或者相对定位),工程单位:Real型数据;相对脉冲:DINT型数据C_Speed:轴当前速度,Real型数据C_Dir:轴的当前方向(1=反向,0=正向)3.绝对或者相对定位AXISx_GOTO子程序命令运动轴转到所需位置。

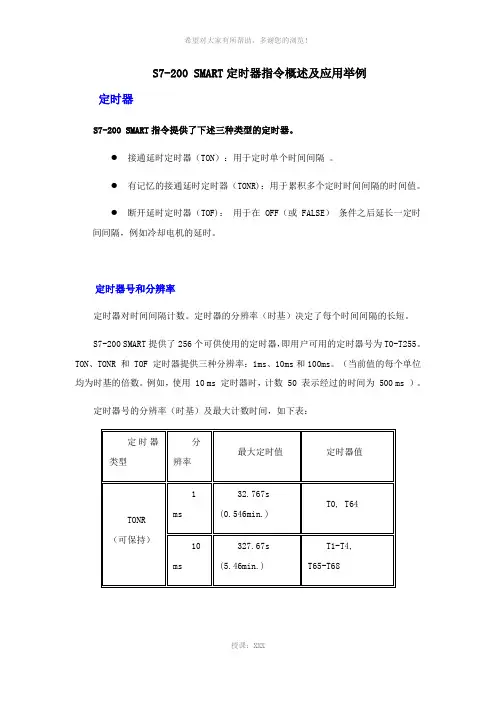
S7-200 SMART定时器指令概述及应用举例定时器S7-200 SMART指令提供了下述三种类型的定时器。
●接通延时定时器(TON):用于定时单个时间间隔。
●有记忆的接通延时定时器(TONR):用于累积多个定时时间间隔的时间值。
●断开延时定时器(TOF):用于在 OFF(或 FALSE)条件之后延长一定时间间隔,例如冷却电机的延时。
定时器号和分辨率定时器对时间间隔计数。
定时器的分辨率(时基)决定了每个时间间隔的长短。
S7-200 SMART提供了256个可供使用的定时器,即用户可用的定时器号为T0-T255。
TON、TONR 和 TOF 定时器提供三种分辨率:1ms、10ms和100ms。
(当前值的每个单位均为时基的倍数。
例如,使用 10 ms 定时器时,计数 50 表示经过的时间为 500 ms )。
定时器号的分辨率(时基)及最大计数时间,如下表:表1. 定时器号和分辨率定时器号决定了定时器的分辨率(时基),并且分辨率在指令块上标出。
注意:同一个定时器编号不能同时用于 TON 和 TOF 定时器。
例如,不能同时使用 TON T32和 TOF T32。
不同分辨率的定时器按以下规律刷新:❖1ms:1ms分辨率的定时器,定时器位和当前值的更新不与扫描周期同步。
对于大于1ms的程序扫描周期,在一个扫描周期内,定时器位和当前值刷新多次。
❖10ms:10ms分辨率的定时器,定时器位和当前值在每个程序扫描周期的开始刷新。
定时器位和当前值在整个扫描周期过程中为常数。
在每个扫描周期的开始会将一个扫描累计的时间间隔加到定时器的当前值上。
❖100ms:100ms分辨率的定时器,定时器位和当前值在指令执行时刷新。
因此为了保证正确的定时值,要确保在一个程序扫描周期中,只执行一次100ms定时器指令。
注意:要确保最小时间间隔,请将预设值 (PV) 增大 1。
例如:使用 100 ms 定时器时,为确保最小时间间隔至少为 2100 ms,则将 PV 设置为22。
S7-200 SMART计数器指令概述及应用举例
计数器
S7-200 SMART 指令提供了下述三种类型的计数器。
●CTU:增计数器。
●CTD:减计数器。
●CTUD:增/减计数器。
计数器指令的梯形图格式如下图所示。
图1.计数器指令
CU:增计数信号输入端;
CD:减计数信号输入端;
PV:预置值;
LD:装载预置值;
R:复位输入;
注意:当子程序在同一周期内被多次调用时,不能使用上升沿、下降沿、定时器和计数器。
注意:由于每个计数器有一个当前值,因此请勿将同一计数器编号分配给多个计数器。
(编号相同的加计数器、加/减计数器和减计数器会访问相同的当前值)
计数器按如下表所列的规律工作:
计数器计数范围为0~32,767。
计数器号不能重复使用。
计数器有两种寻址类型:Word(字)和Bit(位)。
计数器号既可以用来访问计数器当前值,也可以用来表示计数器位的状态。
增/减计数器指令举例如下图所示:
图2.增/减计数器指令
时序图如下所示:
图3.时序图
其中:
✓I0.0加计数;
✓I0.1减计数;
✓I0.2将当前值复位为0;
✓当前值大于等于4时,加/减计数计数器C48 接通 C48 位;。
西门⼦S7-200SMARTPLC功能指令学习及实例分析01⼀、定时器1、S7-200 SMART CPU提供了接通延时定时器、(TON)、保持型接通延时定时器(TONR)、断开延时定时器(TOF)三种定时器。
2、定时器编号与分辨率3、定时器实例分析①接通延时定时器 TON②保持型接通延时定时器 TONR③断开延时定时器 TOF02⼆、计数器1、S7-200 SMART CPU提供了加计数器(CTU)、减计数器(CTD)、加减计数器(CTUD)三种计数器。
2、计数器实例分析①加计数器 CTU②减计数 CTD③加减计数器 CTUD03三、循环指令1、S7-200 SMART CPU提供了FOR-NEXT循环指令⽤于重复执⾏程序段。
每条FOR指令需要使⽤⼀条NEXT指令,FOR指令表⽰循环体的开始,NEXT指令表⽰循环体的结束。
FOR-NEXT循环指令循环嵌套深度可达8层。
2、循环指令⽰例分析通过调⽤FOR - NEXT 指令对VW100、VW102、......、VW108 5个INT变量进⾏求和,求和的结果存放到VW200中。
04四、移位和循环指令1、指令概览2、⽰例分析①移位指令和循环移位指令的⽰例分析②移位寄存器位指令综上所述,每当M0.0有⼀个上升沿到来时,从V200.4开始向⾼地址⽅向数的9个位会朝⾼地址⽅向移位,I0.0的状态会被送到V200.4中。
今天给⼤家推荐⼀个课程:主要为⼤家讲解各功能指令的使⽤、库指令的创建及使⽤、⼦程序、中断程序、间接寻址的使⽤等。
扫码⼆维码,⽴即试看西门⼦S7-200SMART功能指令应⽤课程介绍指令分为基本的指令应⽤,如“位逻辑指令,定时器何计数器指令”等,当在设计程序时,基本的位逻辑指令⽆法满⾜或⽐较⿇烦时,此时使⽤功能指令就可很⽅便的实现,另外我们也可⾃⼰通过使⽤“位逻辑指令及相应的功能指令”搭建成⼀些特定的功能块进⾏使⽤,该功能块可做成对应的库指令⽅便后续使⽤。
数据类型S 7-200 S M A R T 的数据主要分为:l与实际输入/与实际输入/输出信号相关的输入/输出信号相关的输入/输出信号相关的输入/输出映象区: 输出映象区:¡I :数字量输入(D :数字量输入(DI I ) ) ¡Q :数字量输出(D :数字量输出(DO O ) ) ¡A I :模拟量输入 :模拟量输入 ¡A Q :模拟量输出 :模拟量输出l内部数据存储区¡V :变量存储区,可以按位、字节、字或双字来存取V :变量存储区,可以按位、字节、字或双字来存取V 区数据 区数据 ¡M :位存储区,可以按位、字节、字或双字来存取M :位存储区,可以按位、字节、字或双字来存取M区数据 区数据 区数据 ¡T :定时器存储区,用于时间累计 :定时器存储区,用于时间累计¡C :计数器存储区,用于累计其输入端脉冲电平由低到高的次数 :计数器存储区,用于累计其输入端脉冲电平由低到高的次数 ¡H C :高速计数器,独立于 :高速计数器,独立于 C C P U 的扫描周期对高速事件进行计数,高速计数器的当前值是只读值,仅可作为双字(3值,仅可作为双字(322 位)来寻址 位)来寻址¡A C :累加器,可以像存储器一样使用的读/:累加器,可以像存储器一样使用的读/写器件,可以按位、字节、字或双字访问累加器中的写器件,可以按位、字节、字或双字访问累加器中的数据 数据¡S M :特殊存储器,提供了在 :特殊存储器,提供了在 C C P U 和用户程序之间传递信息的一种方法。
和用户程序之间传递信息的一种方法。
可以使用这些位来选可以使用这些位来选择和控制 择和控制 C C P U 的某些特殊功能, 的某些特殊功能, 可以按位、字节、字或双字访问 可以按位、字节、字或双字访问 可以按位、字节、字或双字访问 S S M 位 位 ¡L :局部存储区,用于向子例程传递形式参数 :局部存储区,用于向子例程传递形式参数¡S :顺序控制继电器,用于将机器或步骤组织到等效的程序段中,实现控制程序的逻辑分段。
FOR-NEXT循环指令1、FOR-NEXT 指令用于重复执行程序段,FOR 指令和 NEXT 指令之间的指令为循环体。
FOR指令标记循环的开始,NEXT指令为循环体的结束指令。
2、每条 FOR 指令需要有一条 NEXT 指令与之成对出现。
3、可以嵌套,嵌套深度为 8 层。
其中:INIT,FINAL分别定义起始值和结束值。
使能输入EN有效,循环体开始执行,执行到NEXT指令时返回,每执行一次循环体,当前值计数器INDX增1,达到终止值FINAL时,循环结束。
使能输入无效时,循环体程序不执行。
每次使能输入有效,指令自动将各参数复位。
注意:使用 FOR 和 NEXT 指令可在重复执行分配计数的循环中执行程序段。
每条 FOR 指令需要一条 NEXT 指令。
应用例程 -- For Next 简单循环编程实例使用状态表监控程序的运行如下图所示如上表所示,VW100值为4, INDEX大于终止值,循环终止。
示例:5个变量进行求和后取平均值通过FOR-NEXT 指令,对5 个变量:VW100、VW102、VW104、VW106、VW108 进行求和,求和结果放到VW200 中,计算的平均值存放在VD210 中。
FOR-NEXT指令的循环次数如何计算?答:FOR-NEXT工作过程:启用FOR-NEXT指令,首先将INIT( 初始值) 复制到INDX(当前循环次数);每执行一次,INDX (当前循环次数) 加1;如果INDX 大于FINAL (终止循环次数),终止循环。
比如:INIT=1 FINAL=10,则循环体被执行10次,然后退出循环,退出循环后INDX=11 INIT=0,FINAL=10, 则循环体被执行11次,然后退出循环,退出循环后INDX=11FOR-NEXT指令执行时,主程序是否执行,对扫描周期的影响?答:程序自上而下循环扫描,当FOR-NEXT指令启用后,则循环体被循环执行,直至循环次数到达,循环结束,程序继续向下执行。