基于LQ最优控制的PWM整流器参数整定
- 格式:pdf
- 大小:253.68 KB
- 文档页数:4

基于 PWM 整流器的无功补偿容量整定方法
甘伟;冀红超;杨兴武
【期刊名称】《电测与仪表》
【年(卷),期】2016(053)011
【摘要】为了充分利用PWM整流器的容量,实现对电网无功功率的调节及电网
电压的稳定控制,深入分析了一种基于PWM整流器的无功补偿容量整定方法。
重载情况下,PWM整流器在其容量范围内向电网不补偿或少量补偿无功功率,无功功率补偿量由PWM整流器的额定容量和直流负载功率共同决定;轻载情况下,PWM整流器能够补偿电网所缺的所有无功功率。
文章还详细分析了直流电容参数的选取方法。
最后通过MATLAB/Simulink仿真进行了验证,仿真结果表明该整定方法能够实现无功功率的动态补偿。
【总页数】6页(P61-65,71)
【作者】甘伟;冀红超;杨兴武
【作者单位】上海电力学院,上海200090;上海电力学院,上海200090;上海电
力学院,上海200090
【正文语种】中文
【中图分类】TM46
【相关文献】
1.基于分类算法的SVPWM三相PWM整流器的研究 [J], 戴鹏;李阳;姜小艳;钱振华
2.PWM整流器数学建模及参数整定方法 [J], 王颖
3.基于SVPWM快速算法的三相PWM整流器 [J], 郑征;景小萍
4.基于网络结构的快速SVPWM三电平PWM整流器的研究 [J], 陈炎;戴鹏;李阳;朱荣伍
5.基于改进SVPWM算法的三电平PWM整流器研究 [J], 张杰;王斌;王峰
因版权原因,仅展示原文概要,查看原文内容请购买。
2011年8月电工技术学报Vol.26 No. 8 第26卷第8期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Aug. 2011基于LCL滤波的大功率三相电压型PWM整流器李欣然郭希铮王德伟郝瑞祥游小杰(北京交通大学电气工程学院北京 100044)摘要三相电压型PWM整流器,交流侧采用LCL滤波器,在满足谐波标准时可以大幅减小电感量。
本文首先分析了采用LCL滤波器时系统数学模型及控制算法,然后根据IEEE−519标准要求的电流谐波限制条件,利用SVPWM调制方式产生的谐波电压幅值进行迭代运算来计算LCL 滤波器参数,同时从离散域分析了采用无源阻尼时系统的稳定性。
在此基础上,本文研制了一台500kW三相电压型PWM整流器样机,实验结果验证了上述分析方法的有效性。
关键词:三相电压型PWM整流器 LCL滤波器谐振频率无源阻尼中图分类号:TM464Research and Development of High-Power Three-PhaseVoltage Source PWM Rectifier With LCL FilterLi Xinran Guo Xizheng Wang Dewei Hao Ruixiang You Xiaojie(Beijing Jiaotong University Beijing 100044 China)Abstract Three-phase voltage source PWM rectifier with LCL filter on the AC side can suppress harmonics around the switching frequency, and at the same time decrease the inductance dramatically.In this paper, the mathematical model and control algorithm of PWM rectifier with LCL filter are analyzed. Based on the current harmonic restriction of IEEE-519 standard, the parameters of LCL filter are calculated by iterative algorithm with the harmonic voltage of SVPWM. The stability of the system using passive damping is studied in discrete domain. At last, a prototype of 500kW three-phase voltage source PWM rectifier is established. The analysis is validated in experiments.Keywords:Three-phase voltage source PWM rectifier, LCL filter, resonance frequency, passive damping1引言三相电压型PWM整流器具有直流电压可控、网侧输入电流畸变率低、功率因数高以及能量可以双向流动等优点,广泛应用于工业系统和新能源并网发电系统中[1-3]。

基于LCL滤波器参数优化的PWM整流控制方法研究
杨威;范波;赵伟刚;李瑞强
【期刊名称】《电源技术》
【年(卷),期】2014(038)001
【摘要】为克服传统单L滤波器动态性能差的缺点,提出了用LCL滤波器代替单L 滤波器,其优点是可用较小的电感值达到好的滤波效果.首先建立LCL滤波的PWM 整流器数学模型,根据传统LCL滤波器的参数选择方法,用MATLAB语言设计了粒子群算法的寻优程序,相比传统的分布设计法和简易设计法,粒子群算法较为简单,通过追随当前搜索到的最优值来寻找全局最优.计算结果表明,粒子群算法较传统算法具有更好的收敛性.
【总页数】3页(P149-151)
【作者】杨威;范波;赵伟刚;李瑞强
【作者单位】河南科技大学电子信息工程学院,河南洛阳471003;河南科技大学电子信息工程学院,河南洛阳471003;中信重工机械股份有限公司,河南洛阳471003;河南科技大学电子信息工程学院,河南洛阳471003;河南科技大学电子信息工程学院,河南洛阳471003
【正文语种】中文
【中图分类】TM461
【相关文献】
1.基于LCL滤波器的船舶轴带发电机PWM整流器 [J], 甘世红;褚建新;顾伟;陈泰山
2.基于LCL滤波器的三相电压型PWM整流器 [J], 孙亮;田联房;王孝洪;张小凤
3.基于LCL滤波器的电压源型PWM整流器控制策略综述 [J], 孙蔚;伍小杰;戴鹏;周娟
4.基于LCL滤波器的PWM整流器稳定控制研究 [J], 邓建国;孔永强;邹勇波
5.基于LCL滤波器的电压型PWM整流器新型电流控制策略研究 [J], 张宪平因版权原因,仅展示原文概要,查看原文内容请购买。
基于LCL滤波的PWM整流器控制策略研究【摘要】介绍了准PR调制器的原理,在此基础上,详细分析了PWM整流器在α-β静止坐标系下电流内环和电压外环的设计方法,并基于Matlab/Simulink仿真平台搭建两电平PWM整流器仿真模型,对本文分析的设计方法进行了仿真研究,仿真结果验证了本文分析的基于PR控制器设计的电流环和电压环的正确性和有效性。
【关键词】PWM整流器LCL滤波器准PR控制器控制策略1 引言随着电力电子技术的发展,GTR、GTO、MOSFET、IGBT、IGCT等全控型开关器件制造技术不断进步,使得变流器主电路结构更加简单,而且还具有控制与驱动灵活可靠,有效改善电路中的谐波,大幅提高变流器功率因数,提高系统的动态响应速度,有效控制环境噪声污染等优点[1]。
全控型器件的进步有力的推动了变流技术的发展。
20世纪80年代提出了PWM整流技术,随后PWM技术飞速发展,PWM整流技术得到了广泛应用。
PWM整流器具有输入电流正弦化、功率因数可控、电能双向传输、直流母线电压可调等优点[2]。
由于PWM整流器真正实现了“绿色电能变换”、其网侧呈现出受控电流源特性,这一特性使得PWM整流器及其控制技术获得进一步的发展和拓宽。
在基于LCL滤波器的电压源型PWM整流器系统中,控制策略无疑是一个很重要的环节,所采取的控制策略直接关系到整流器的运行性能。
LCL滤波器的电压型PWM整流器是从单L滤波的整流器发展而来的,因而控制策略延续了单L的控制思想。
2001年MarcoLiserre和FredeBlaabjerg分析了LCL滤波器的设计方法,并证明了在低频的数学模型下,电容的作用可以忽略。
这样对于LCL 滤波器的PWM整流器控制系统设计可以继续沿用单L的PWM整流器控制系统的设计方法。
鉴于在三相静止坐标系(a-b-c)中系统模型复杂,控制难以实现,因而当前均是在两相静止坐标系(α-β)或两相旋转坐标系(d-q)下对LCL的PWM整流器加以控制。

LCL滤波的单相三电平PWM整流器比例谐振控制聂海龙;徐定成【摘要】鉴于电流环传统PI控制存在稳态误差等缺点,在网侧电流外环中采用准比例谐振(PR)控制器,减小稳态误差及实现网侧单位功率因数的同时,可针对特定次谐波进行补偿;采用电网电压前馈策略以减小电网电压对电流环的干扰;使用单相三电平空间矢量脉宽调制(SVPWM)技术,在进一步抑制谐波的同时易于数字化实现。
仿真分析验证了所提方法的正确性和可行性。
【期刊名称】《电器与能效管理技术》【年(卷),期】2015(000)001【总页数】6页(P61-66)【关键词】三电平PWM整流器;LCL滤波器;PR控制器;电网电压前馈;空间矢量脉宽调制【作者】聂海龙;徐定成【作者单位】重庆长厦安基建筑设计有限公司,重庆400044;;【正文语种】中文【中图分类】TM4610 引言PWM整流器具有直流侧电压可控,网侧输入电流谐波含量小,能量可双向流动以及可实现单位功率因数等优点,广泛应用于工业领域,如统一潮流控制器、混合并联型有源电力滤波器以及光伏并网发电等场合。
其中,三电平PWM整流器因其功率器件电压应力低,能降低器件的耐压等级以及减小开关损耗等优点,特别适合于电压等级较高的中、大容量整流场合[1]。
PWM整流器采用的滤波器主要有L型和LCL型两种。
LCL型滤波器对高次谐波具有更好的衰减能力,可在总电感值比L型滤波器小得多的情况下,得到相同的滤波效果。
由于三电平PWM整流器电压等级高、容量大,开关频率相对较低,采用LCL型滤波器能够得到更好的滤波效果,但LCL型滤波器是一个三阶环节,对系统的控制策略要求更高。
采用网侧电流直接闭环控制的LCL型滤波的PWM 整流系统是不稳定的。
目前,抑制LCL型滤波器谐振,增加系统稳定性的方法主要有有源阻尼法[2-4]、无源阻尼法[5-6]等。
无源阻尼法是在 LCL滤波器的电容支路中串入阻尼电阻来增加系统的稳定性。
但阻尼电阻的存在增加了系统的功率损耗,降低了系统效率,不适合于电压等级高、容量大的三电平PWM整流系统。
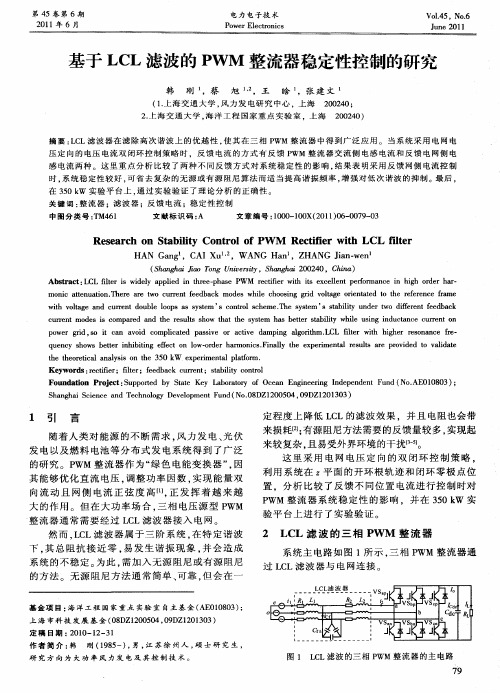
L CL 滤波在PWM 整流器中的应用于京生(石家庄学院电子信息工程系,河北石家庄050035)Application of L CL 2filter Based Three 2p hase PWM RectifierYU Jing 2sheng(Department of Electric Information Engineering ,Shijiazhuang University ,Shijiazhuang 050035,China ) 摘要:采用L CL 滤波可以有效地减小PWM 整流器开关频率及其倍数的高次谐波。
但是L CL 滤波元件存在谐振问题,会严重影响系统的稳定性。
针对上述问题,提出了可以根据系统要求及成本因素,采用抑制谐振电阻或虚拟电阻的策略避免谐振,并对滤波参数计算及控制策略进行了分析,最后仿真结果证明了能够减小高次谐波并具有较好的稳定性。
关键词:L CL 滤波器;PWM 整流器;谐振;抑制电阻;虚拟电阻中图分类号:TM464文献标识码:A文章编号:100122257(2008)0620070203收稿日期:2008203212Abstract :L CL filter can reduce t he switching f requency ripple of t he t hree 2p hase p ulsewidt h modulation (PWM )rectifier.The main goal is to ruduce t he ripple at a resonable co st ,meanwhile a 2voiding resonance t hen achieving a steady margin.In t his paper ,control met hods based on damping resistor and virt ual resistor are presented.The re 2sult s of simulation using Matlab show t he validity of t he propo sed met hod.K ey w ords :L CL filter ;PWM rectifier ;reso 2nance ;damping resistor ;virt ual resistor0 引言PWM 整流器以其谐波污染小、功率因数高及能量能够双向流动等优点,得到了越来越广泛的应用。
三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。