电子罗盘设计方案
- 格式:doc
- 大小:25.50 KB
- 文档页数:3
范例三 电子罗盘一.系统概述本系统的目标是设计一个两轴数字罗盘系统。
对其所指的方向进行测量。
当系统工作时,系统中的磁阻传感器(HMC022)对所在地的地磁进行A/D 采集,然后对采集量进行处理,将所在的方向相对正北的角度通过串口发送给高端。
本系统可工作在正常状态和标定状态。
正常状态在该状态下,系统对地磁进行正常采集后进行校准,然后通过串口将计算的方向角发送出来。
2 标定状态在该状态下,系统对周围的磁场进行采集,以此为参考,推导出校准参数。
退出该状态时,将校准参数保存起来,以便用于对正常状态下采集的数据进行偏置校准。
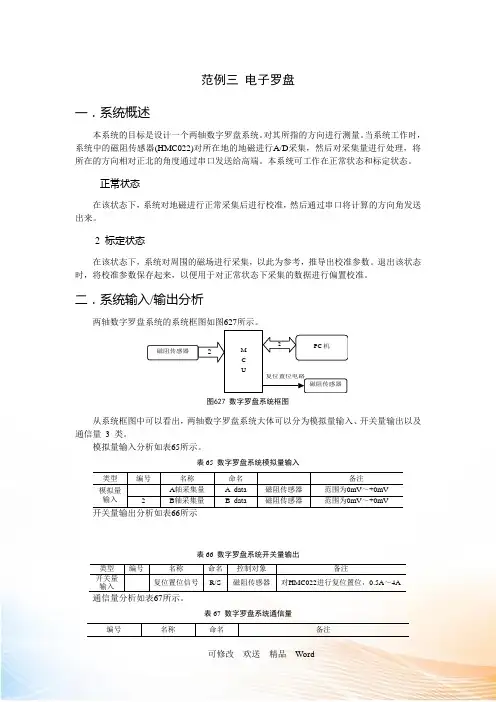
二.系统输入/输出分析两轴数字罗盘系统的系统框图如图627所示。
M C U2磁阻传感器2PC 机磁阻传感器复位置位电路图627 数字罗盘系统框图从系统框图中可以看出,两轴数字罗盘系统大体可以分为模拟量输入、开关量输出以及通信量 3 类。
模拟量输入分析如表65所示。
表65 数字罗盘系统模拟量输入类型 编号 名称 命名 备注模拟量输入A 轴采集量 A_data 磁阻传感器 范围为0mV ~+0mV 2B 轴采集量B_data磁阻传感器范围为0mV ~+0mV开关量输出分析如表66所示表66 数字罗盘系统开关量输出类型 编号 名称 命名 控制对象 备注开关量 输入复位置位信号R/S磁阻传感器对HMC022进行复位置位,0.5A ~4A表67 数字罗盘系统通信量编号名称命名备注串口发送数据 TxD 向PC 端发送数据 2串口接受数据RxD接收PC 端发来的数据三.硬件设计芯片选型选取芯片时应该注意:不要将所有的I/O 口用满,应当预留一定的输入输出端口,以便扩展需要。
通过分析数字罗盘系统的输入量和输出量,发现所需的I/O 口较少,为5个。
但考虑到该系统对A/D 采集精度要求较高并且要求有SCI 模块以便于通信,故考虑该系统采用具有0BitA/D 采集和SCI 模块的MR8。
2 设计框图数字罗盘系统的硬件框图如图628所示,下面将分析A/D 采集中的电压放大模块、HMC022(磁阻传感器)的置位/复位电路和SCI(RS232)通信模块。
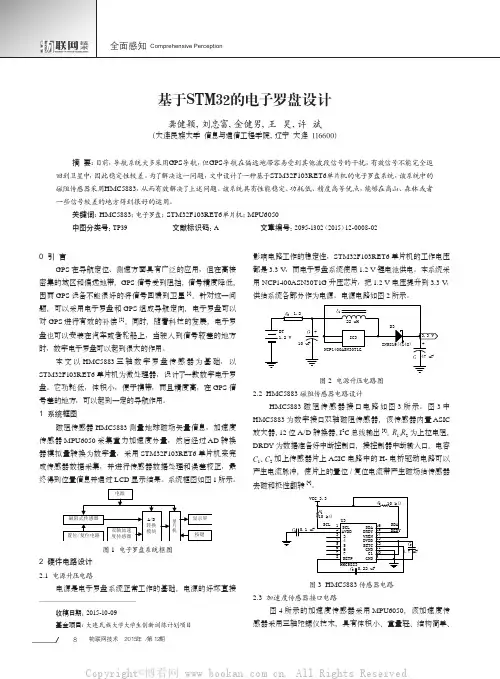
AndroidST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
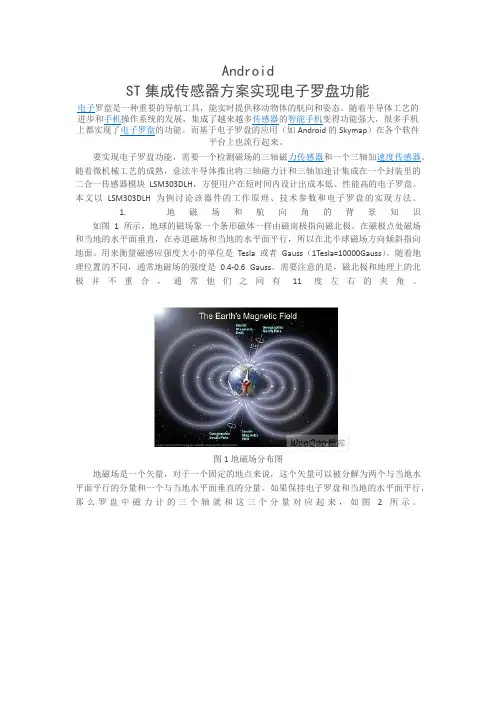
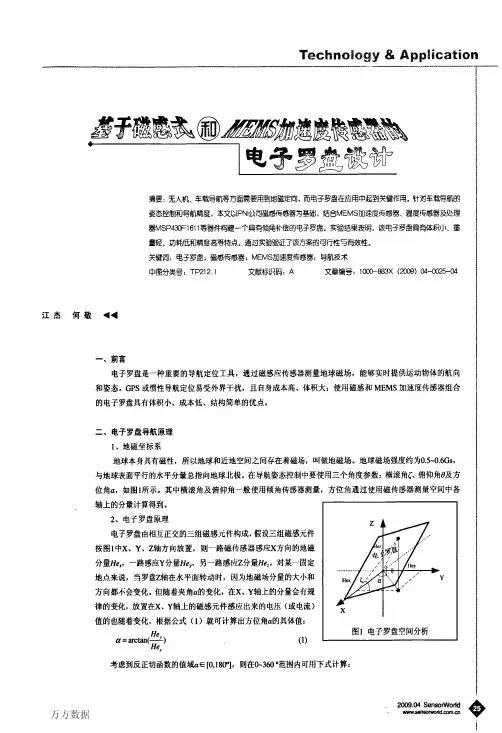
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
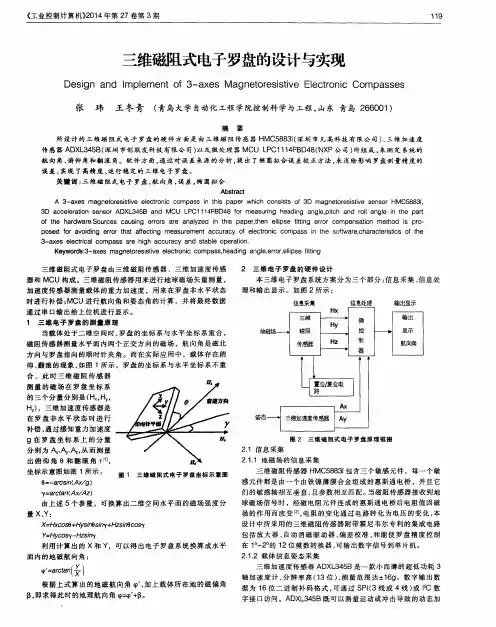
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
本科生毕业设计(论文)论文题目:基于51系列单片机数字电子罗盘设计与实现姓名:学号:班级:年级:专业:学院:指导教师:完成时间:2013年5 月28日作者声明本人以信誉郑重声明:所呈交的学位毕业设计(论文),是本人在指导教师指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。
文中引用他人的文献、数据、图件、资料均已明确标注出,不包含他人成果及为获得东华理工大学或其他教育机构的学位或证书而使用过的材料。
对本设计(论文)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本毕业设计(论文)引起的法律结果完全由本人承担。
本毕业设计(论文)成果归东华理工大学所有。
特此声明。
毕业设计(论文)作者(签字):签字日期:年月日本人声明:该学位论文是本人指导学生完成的研究成果,已经审阅过论文的全部内容,并能够保证题目、关键词、摘要部分中英文内容的一致性和准确性。
学位论文指导教师签名:年月日基于51系列单片机数字电子罗盘设计与实现黄飞Based on 51 single-chip digital electronic compass system design and implementationHuangFeiI摘要当今社会交通越来越发达,导航系统也随之普遍。
在以前人们大多数使用地图,看路况。
但是由于经济发展,交通路线也变化好大。
现在虽然有GPS,但是在山区有覆盖遮蔽的地方,GPS也失去作用。
汽车出巡不方便,为解决这个的问题,本文主要研究使用在汽车导航设备的能够精确定向的电子罗盘系统。
本文主要介绍磁阻式电子罗盘的工作原理,并详细介绍了磁阻传感器HMC5883、双轴加速度传感器ADXL202、AD7705转换芯片以及AT89C52单片机的磁阻式电子罗盘的硬件设计;根据传感器信号输出特点,经过AD7705模数转换后,利用AT89C52单片机处理信息功能经过分析后,经显示屏显示行驶方向。
毕业设计说明书数字式电子罗盘设计学生姓名:孔垂礼学号: ********** 学院:计算机与控制工程专业:电气工程及其自动化指导教师:***2015 年 06 月数字式电子罗盘设计摘要数字式电子罗盘具有很多优点,例如:体积比较小、启动非常迅速、功率损耗较低、制造成本低廉等,当今社会测控技术对测向传感器提出了非常高的要求;为了提高数字罗盘的测量精度,特意设计了一种基于HMC5883L三轴磁阻传感器[1]的数字电子罗盘;在分析相关类似产品的基础上,特别强调对电源、器件选型、信号调理电路、软件设计等方面进行了分析研究,设计出了数字罗盘并且研制了试验的样机;为验证设计效果,在双轴陀螺测试转台上进行了测试,试验结果初步验证了该设计方案的可行性;论文的研究工作可以为研究和改良数字式磁罗盘的测量准确度提供可靠的资料.关键词:地磁场,数字罗盘,HMC5883L三轴磁阻传感器,重力加速度计Here is the translation of your chinese paper’s titleAbstractDigital electronic compass, has small volume, quick start, low power consumption, and low cost, the modern measurement and control technology puts forward higher requirements on sensor of direction finding; In order to improve the precision of the digital compass, we design a HMC5883L triaxial magnetic resistance sensor based digital electronic compass; On the basis of the analysis of related products, focuses on the power supply, device selection, signal conditioning circuit and software design are analyzed in aspects of research, design the digital compass and test prototype was developed; To verify the design effect, on the two-axis gyro testing table was tested, experimental results verify the feasibility of the design scheme of; Thesis research work could be used to research and provide reference for improving the measuring accuracy of digital magnetic compass.Key words : Earth's magnetic field, digital compass, HMC5883L three-axis magnetic resistance sensor, the gravity accelerometer目录摘要 (2)Abstract (3)目录...........................................................................................................................................错误!未定义书签。
范例三电子罗盘一.系统概述本系统的目标是设计一个两轴数字罗盘系统。
对其所指的方向进行测量。
当系统工作时,系统中的磁阻传感器(HMC1022)对所在地的地磁进行A/D采集,然后对采集量进行处理,将所在的方向相对正北的角度通过串口发送给高端。
本系统可工作在正常状态和标定状态。
1 正常状态在该状态下,系统对地磁进行正常采集后进行校准,然后通过串口将计算的方向角发送出来。
2 标定状态在该状态下,系统对周围的磁场进行采集,以此为参考,推导出校准参数。
退出该状态时,将校准参数保存起来,以便用于对正常状态下采集的数据进行偏置校准。
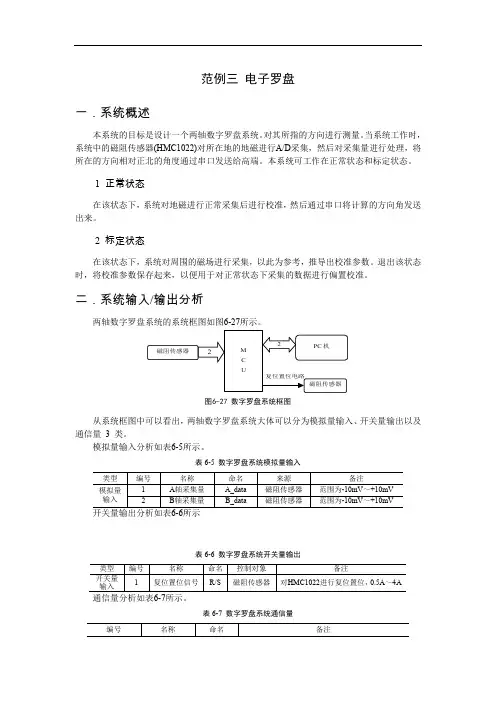
二.系统输入/输出分析两轴数字罗盘系统的系统框图如图6-27所示。
图6-27 数字罗盘系统框图从系统框图中可以看出,两轴数字罗盘系统大体可以分为模拟量输入、开关量输出以及通信量3 类。
模拟量输入分析如表6-5所示。
表6-5 数字罗盘系统模拟量输入开关量输出分析如表6-6所示表6-6 数字罗盘系统开关量输出表6-7 数字罗盘系统通信量三.硬件设计1 芯片选型选取芯片时应该注意:不要将所有的I/O口用满,应当预留一定的输入输出端口,以便扩展需要。
通过分析数字罗盘系统的输入量和输出量,发现所需的I/O口较少,为5个。
但考虑到该系统对A/D采集精度要求较高并且要求有SCI模块以便于通信,故考虑该系统采用具有10BitA/D采集和SCI模块的MR8。
2 设计框图数字罗盘系统的硬件框图如图6-28所示,下面将分析A/D采集中的电压放大模块、HMC1022(磁阻传感器)的置位/复位电路和SCI(RS-232)通信模块。
图6-28 基于MR8的数字罗盘系统框图3 MCU引脚汇总列表数字罗盘系统中MR8的I/O口具体分配情况如表6-8所示。
表6-8 MR8的I/O分配4 模块硬件分析及设计(1) A/D采集模块在该模块中,使用MR8内部的A/D模块对HMC1022产生的两路电压采集。
考虑到在地球磁场下HMC1022输出的电压范围在-5mv~5mv之间,对于如此小的电压,模数转换器无法准确转换,因此需要对其输出电压进行放大。
哈尔滨理工大学开放实验报告实验项目名称:电子罗盘系统的原理与设计学生所在学院:测控技术与通信工程学院学生所在班级:学生姓名:实验总学时数:指导教师:哈尔滨理工大学教务处制20 年月日一、实验目的与任务:实验目的:通过对《电子罗盘系统的原理与设计》总体认识,学习电子罗盘的原理及涉及的相关知识,运用加速度计和磁阻传感器以MSP430单片机为核心处理器,1602为显示机构,完成电子罗盘的设计。
在完成设计的同时,对自身能力的提高,在科学技术飞速发展的社会里,增加自己的社会竞争力。
实验任务:1. 查阅资料在对电子罗盘原理的有一定了解的基础上,确定完成实验所需要的元器件2.设计电子罗盘的硬件系统并作出原理图。
3.对部分可仿真电路进行仿真,修改原理图。
4.学习Protel软件绘制PCB板,并绘制出PCB图。
5.掌握贴片电阻的焊接技术,焊接电路板,进行调试。
6.学习并掌握MSP430单片机上编程资源及相关的使用方法,在IAR软件开发环境上编制主程序及各部分子程序;完成磁阻电子罗盘的软硬件联合调试,实现系统功能。
7.开发开发板的其他功能。
二、实验前的准备工作(包括资料查找、相关知识准备等):1.查阅资料初步了解电子罗盘的原理,初步学习430正确选用试验中所需要的芯片,对电子罗盘的设计有整体的结构框架并设计出实验方案。
把实验方案交指导教师,根据指导教师建议对实验方案的可行性、实验室条件等因素对方案进行完善修正,使之具有可操作性,满足实验目的要求,确定实验方案并制定实验进度计划。
2. 分析磁阻效应从而了解磁阻传感器的工作原理及其输出信号特征,进而明确磁阻电子罗盘利用地球磁场测量载体方向的原理。
3. 根据实验进度依次完成各进度中所需知识的学习。
(1) 学会用Protel绘制电路板,并完成MSP430最小系统及传感器模块的原理图和PCB图的绘制。
(2) 加工印制电路板并完成焊接。
(3) 学习MSP430单片机原理,完成最小系统板的硬件调试。
磁阻式电子罗盘实验【实验目的】1.了解磁阻传感器的原理;2.掌握二维电子罗盘的组成和工作原理及一些制作实例;3.培养程序编写和整机调试能力;【实验内容】实验包括硬件设计和软件设计两个部分。
首先根据要实现的功能来确定所需要的硬件设备。
硬件电路确定好以后,根据电路要实现的功能,编写相应的软件模块。
1.硬件方案设计硬件电路由传感器、A/D 转换器、单片机、LED 显示、测控电路组成。
具体过程如图1所示。
图1 电子罗盘系统方框图2. 软件方案设计软件系统由初始化设置、数据采集、方向角计算和数字量输出组成,开始工作是先初始化传感器和单片机,向磁阻传感器发送复位/置位脉冲,获取传感器的偏置电压值。
如图2所示,程序设计流程图。
图2 程序设计流程图 【实验原理及电路模块】初始化数据采集A/D 转换方向角计算显示结果1.磁阻效应电子罗盘的工作原理是基于磁阻效应。
磁阻效应是指某些金属或半导体的电阻值随外加磁场变化而变化的现象。
基于霍尔效应有普通磁阻效应和各向异性磁阻效应之分。
磁阻效应由于载流子在磁场中受到洛伦兹力而产生的。
在达到稳态时,某—速度的载流子所受到的电场力与洛伦兹力相等,载流子在两端聚集产生霍尔电场,比该速度慢的载流子将向电场力方向偏转,比该速度快的载流子则向洛伦兹力方向偏转。
这种偏转导致载流子的漂移路径增加。
或者说,沿外加电场方向运动的载流子数减少,从而使电阻增加。
这种现象称为磁阻效应。
若外加磁场与外加电场垂直,称为横向磁阻效应;若外加磁场与外加电场平行,称为纵向磁阻效应。
2. 地磁场的测量原理地磁场的强度不是固定不变的,地磁场的大小和方向随时间、地点而变,且除地磁赤道处以外的地磁场都不是水平的。
常用磁倾角、磁偏角、地磁场水平强度(地磁场的水平分量)这三个要素来描述地磁场的大小和方向。
磁力线从南极指向北极,在两极垂直于地球表面,在赤道平行于地球表面。
磁南北极与地理南北极并不重合,而是有一个11.5°的夹角。
本科生毕业论文(设计)题目:基于AT89S52单片机的电子罗盘系统的设计与实现学生姓名 ******学号 0804200230指导教师 ******二级学院信息学院专业名称计算机科学与技术班级 0*计算机*班20**年4月声明及论文使用的授权本人郑重声明所呈交的论文是我个人在导师的指导下独立完成的。
除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写的研究成果。
论文作者签名:年月日本人同意浙江财经学院有关保留使用学位论文的规定,即:学校有权保留送交论文的复印件,允许论文被查阅和借阅;学校可以上网公布全部内容,可以采用影印、缩印或其他复制手段保存论文。
论文作者签名:年月日基于AT89S52单片机的电子罗盘系统的设计与实现摘要:随着汽车进入千家万户,但普通汽车不具备高端汽车内置的电子罗盘定向系统;而导航定向对于行车安全非常重要。
本文将介绍一种用于车载设备精确定向的电子罗盘系统。
首先介绍磁阻传感器测向原理,然后本系统采用三轴磁阻传感器HMC5883作为信号采集装置,实现自动定向的软硬件设计方法,接下来系统采用ATMEL 的8位单片机AT89S52单片机为核心控制器,设定以正北为0º的一周。
单片机获取传感器信息,经过分析后通过液晶屏显示行驶方向,并实现了偏离固定方向区间行驶便产生报警的功能,同时分析了系统产生的误差。
关键词:AT89S52单片机;HMC5883传感器;电子罗盘electronic compass orientation system based on AT89S52Abstract:Nowadays, as automobile is owned by normal households, the navigation system is a rather important part for the traffic safety. However, a normal car does not have the vehicle antenna automatic orientation system as the high-end car. This article will introduce a more accurate electronic compass orientation system which can be used in normal cars. First part of this article is about the application of magnetoresistive sensor measurement principle with he HMC5883 3-axis magnetoresistive sensor as a signal acquisition device. Then, it adopts ATMEL 8 bit microcontroller AT89S52 MCU as the core controller. This controller is set to 0 digits in north. In this way, the controller can acquire and analyze information to show the direction on LCD screen as well as alert when the vehicle is out of the direction. This is to avoid system incidents.Key words:AT89S52 microcontroller; HMC5883 sensor; electronic compass orientation system目录1 绪论 (1)1.1课题背景 (1)1.2国内外研究现状及发展趋势 (1)1.3本文主要研究内容和章节安排 (2)2 系统分析与设计 (3)2.1电子罗盘测向原理介绍 (3)2.2系统主控系统的选择 (4)2.3单片机比较和选型 (5)2.4传感器的选择 (6)2.5显示屏的选择 (8)3硬件系统模块设计与实现 (9)3.1传感器模块 (9)3.2控制器模块 (9)3.3报警控制模块 (10)3.4显示输出模块 (11)3.5按键模块 (11)4软件系统设计与实现 (12)4.1主程序设计 (12)4.2传感器模块程序 (13)4.3报警控制模块程序 (17)5总结与展望 (21)致谢 (23)1 绪论1.1课题背景电子罗盘系统在交通运输、探险勘测等定向领域有广阔的应用前景。
目录引言 (2)第一章系统硬件设计 (2)1. 1 地磁场导航原理 (2)1. 2 系统构成 (2)1. 3 磁阻传感器 (3)1. 4 信号转换电路设计 (5)1. 5 传感器复位置位电路设计 (6)1. 6 微控制器的选择 (6)第二章系统软件设计 (7)2. 1 复位置位程序设计 (7)2. 2 干扰的校正 (8)2. 3 程序主流程 (9)结束语 (10)参考文献........................................... 错误!未定义书签。
引言现如今, 全球定位系统(GPS) 已经得到了广泛的应用,它借助四个卫星保持在一条基准线上就能跟踪汽车的位置, 但是在城市和隧道中卫星信号会在短时间内出现盲区, 这就需要精度很高的罗盘帮助GPS 型导航系统。
通常可以采用陀螺仪来保持跟踪, 但是陀螺仪体积大, 成本高,故障率高, 维修困难。
所以这种低成本的磁阻( MR) 型罗盘就是最佳选择。
第一章系统硬件设计1. 1 地磁场导航原理地球是个巨大的磁体, 磁力线起始于南极附近的一个点,终止于北极附近的一个点。
即: 2 个磁极。
地磁场强度约为0. 5~0. 6 Gauss, 磁力线与地球表面平行的水平分量总指向地磁北极. 我们古代就是根据这个原理发明了司南。
而本文所研究的电子罗盘应用了一种传感器, 其内部集成了一种电阻( 称为磁阻) , 磁阻在不同方向感受磁场时阻值会发生相应的变化。
本系统正是应用这种阻值的变化来设计电路的。
1. 2 系统构成本文研究的电子罗盘由磁阻传感器、信号转换电路、传感器复位置位电路、电源模块和微控制器等组成。
磁阻传感器输出经过信号处理电路和微控制器处理后得到航向角, 数码管用来显示航向角; 复位电路用于恢复磁阻传感器在强磁干扰后的灵敏度; 电源模块分别为复位电路和信号处理电路供电。
具体硬件框图如图1 所示。
图1硬件框图1. 3 磁阻传感器在铁磁性材料中会发生磁阻的非均质现象(AMR) , 当沿着一条长而且薄的铁磁合金带的长度方向施加一个电流, 在垂直于电流的方向施加一个磁场, 合金带自身的阻值会发生变化, 这就是磁阻现象, 如图2 所示。
本科毕业论文便携式电子罗盘软件设计与校准学生姓名:沈彤学号:20120214241学院:机电工程学院专业:机械设计制造及其自动化(机电一体化)指导教师:葛海浪 (助教)2016年 5 月 9 日目录引言 (4)第一章.电子罗盘的测量与倾角补偿原理 (5)1.1 电子罗盘的测量原理 (5)1.2 倾角补偿原理 (6)第二章电子罗盘的硬件设计与实现 (7)2.1 系统框架 (7)2.2 传感器的选择 (7)2.3. 单片机开发环境 (8)第三章.电子罗盘误差分析与补偿 (9)3.1 误差来源 (9)3.2 误差的补偿 (10)3.2.1 漂移补偿 (10)3.2.2 椭球化补偿 (10)第四章.校正及其程序设计 (12)4.1 8字型校准 (12)4.2 8字型校准的程序设计 (12)4.3 倾斜补偿的程序设计与实现 (13)4.4 滤波算法 (14)第五章.结论与展望 (15)致谢 (16)参考文献 (17)便携式电子罗盘软件设计与校准摘要本设计采用了STM32F103C8T6高速单片机为控制核心,连接了采用IIC总线通讯方式的磁阻传感器HMC5883L集成模块和加速度传感器MMA8452集成模块,通过磁阻传感器测量大地磁场,但是测量的数据仅仅在水平面内有效。
在倾斜时侧需要使用加速度计进行补偿。
在经过加速度传感器的姿态数据采集后使用单片机进行数据整理、运算,经过加速度计得到的X、Y、Z三轴姿态信息进行分别计算出俯仰角PITCH和横滚角ROLL。
磁阻传感器采集的大地磁场的X、Y、Z三轴数据经过单片机进行俯仰角和横滚角的倾斜度补偿。
在经过补偿之后,通过SPI连接的OLED显示屏输出磁阻传感器的大地磁场角度信息。
关键词:STM32单片机磁阻传感器加速度计电子罗盘The design and calibration of portable electronic compass systemAbstract This design adopts the stm32f103c8t6 high-speed microcontroller as control core, connecting the IIC bus communication hmc5883l magnetoresistive sensor integrated module and acceleration sensor MMA8452 integrated module, by magnetoresistive sensor to measure the magnetic field of the earth, but the measurement data only in the horizontal plane effectively. Accelerometer is used to compensate for the inclination of the side. In after acceleration sensor attitude data acquisition SCM data arrangement, calculation, after acceleration meter is obtained the X, y, Z three-axis attitude information are respectively to calculate the pitching angle of pitch and transverse roll angle, roll. The X, Y and Z three axis data of the magnetic field of the magnetic field of the magnetic field of the magnetic field of the magnetic resistance sensor are carried out by the single chip microcomputer to carry on the pitch angle and roll angle of the roll angle compensation. After compensation, the earth's magnetic field angle information of the OLED display is connected with the SPI display screen.Key words STM32 MCU ; magnetoresistive sensor ;acceleration sensor; electronic compass引言本课题所使用的电子罗盘属于磁罗盘,它是一种根据大地磁场各个方向的矢量的大小计算出方向的装置。
电子罗盘设计方案.doc
电子罗盘设计方案 1 引言V2XE 是一种以集成微处理器作为控制和接口新型2轴罗盘和大磁场传感器[1,U2XE 使用新型系统常用3V 工作电源,具有功耗低、尺寸小、各种条件下抗噪声能力强、较大测量灵敏感应区等优点。
V2XE 结合了PNI 公司专利磁场感应传感器和测量电路技术,不受补偿漂移影响,不同温度下测量结果很稳定。
V2XE 简单易行标准SPI 接口输入/输出数据。
2 性能特点V2XE 典型特性如下功率低(3V DC,2mA 输出); 封装尺寸小(25.4mm5.4mm11.5mm); 高磁感应(0.01°); 高磁精度(2.0°); 数字接口输出(3V 标准SPI 接口); 具有高磁场感应(0.00015Gauss); 具有大磁场量程(±11Gauss)。
V2XE 引脚功能如表1所列。
将V2XE 应用于GPS 系统,用AT89C2051读取V2XE 测量数据,串口将数据传送到GPS 处理器,图1示出V2XE 连接到单片机原理图。
AT89C2051没有标准SPI 口输出[2,故分别用P1.
7、P1.6和P1.5 来模拟SCLK、MISO 及MOSI 端。
V2XE 复位引脚SYNC 由P3.7脚控制,SSNOT 接,V2XE 工作从机模式。
3 数据格式和命令字V2XE 有Big Endian 和Little Endian 两种数据格式。
Big Endian 类型数据是从高位到低位存放,Little Editan 数据是倒序存放,即最高8位依次放最低8位数据,最低8位依次放最高8位数据。
如图2所示。
带有数据命令格式由开始标志(Sync Flay)、指令类别(Frame Type)和结束标志(Terminator)组成,图3所示是一个带有参数Heading(0X02)和Magnitude(0X05)SetDataComponents(0X03)命令构成。
V2XE 常用命令字包括GetModInfo、ModInfoResp、SetDataComponent、GetData 、DataResp、Setconfig、GetConfi g、ConfigResp 和SaveConfig 。
其指令码和功能如表2所示。
4 编程实例SPI 接口数据接收和发送是同步。
V2XE 每接收一个数据时将会发出0X00 。
当V2XE 发送命令应答时,它将不处理任何输入数据,,主机获取V2XE 数据时,应是发送和接收同时进行。
用 C 语言编写发送-接收函数SPITransmit 如下一个V2XE 系统典型应用流程如图4所示。
V2XE 出厂时,都其ROM 中固化了芯片版本号。
用户第一次应用V2XE 系统可首先读出该版本号以判断器件是否正常工作,可先向V2XE 发送命令GetModInfo,然后读取返回值ModInfoResp,其程序如下这样,获芯片信息存放数组verson 中,可
以读取值和实际版本号(V2XEV201)对比以确定系统是否正常工作,系统正常,首先要需要设置返回数据格式以确定V2XE 返回这些用户感兴趣值,主要包括磁方向角、磁场强度、温度和校准状态位等。
另外,还要设置一些初始化参数,主要包括Declination(本磁角,可以从http///cgi- bin/seg/gmag/fldsnth1.pl 获)、True North(设置参照角度为磁北[3)、Big Endian(选择数据大、小模式)、Dampingsize (数据缓冲区,将缓冲区里数据平均后作为V2XE 实际输出)。
V2XE 实际应用中,常常需要校准,常用命令包括StartCal、StopCal、GetCalData、CalDataResp 和SetCalData, 其指令代码和功能描述如表3所示。
标准过程中,V2XE 装置要尽量水平放置,从开始校准到结束校准过程中需将装置原旋转两周。
每转时间不小于30s,校准完成后,可以查询参数calstate 来判断校准是否成功,完成参数设置和校准等初始化工作后,可以发送指令GetData(0x04 )来获取V2XE 数据,对V2XE 每发送命令一次必须将其输出全部读出。
否则会影响下一次正常输出。