振动陀螺仪简介
- 格式:ppt
- 大小:8.60 MB
- 文档页数:46
振动陀螺仪的原理振动陀螺仪是一种基于旋转惯性原理工作的仪器,用于测量和检测物体的旋转运动。
它的工作原理是利用陀螺仪的转动稳定性和陀螺效应。
下面是对振动陀螺仪原理的详细介绍。
1. 陀螺效应:陀螺效应是指陀螺具有保持稳定旋转轴方向的倾向。
当陀螺受到外界作用力时,其转动轴会发生倾斜,但由于陀螺的旋转惯性,会产生一个与外力方向垂直的力矩,使陀螺重新保持稳定。
2. 工作原理:振动陀螺仪通常由陀螺转子、传感器和信号处理器等部分组成。
陀螺转子由一个通过支撑轴固定的旋转陀螺组成,通过电动机或马达驱动转子旋转。
转子在转动过程中,会受到外界物体旋转的影响,产生陀螺效应。
3. 转动稳定性:振动陀螺仪的工作基于陀螺转子的转动稳定性。
转子旋转时,保持相对刚性的旋转轴,受到外界力矩的影响会产生预cession和nutation两种运动。
预cession是转子旋转轴绕一个垂直于外部力矩的轴缓慢转动,其周期与外部力矩的大小和方向有关。
而nutation是转子轴线绕自身轴线产生的周期性变化。
4. 示性运动:振动陀螺仪中的传感器用于检测陀螺转子的示性运动,从而测量外界力矩对转子的影响。
传感器通常包括压电陶瓷、电容式传感器或光学的方式。
这些传感器可以感知转子的变形或运动,将其转化为相应的电信号,并传递给信号处理器进行处理。
5. 信号处理:信号处理器通常由模数转换器、滤波器、放大器和微处理器等组成。
模数转换器将模拟信号转换为数字信号,滤波器用于去除噪音和干扰,放大器用于放大信号强度,微处理器用于处理和分析信号,并可以输出陀螺仪的测量结果。
6. 应用领域:振动陀螺仪广泛应用于惯性导航、无人机、航天航空、车辆导航、工程测量和地质勘探等领域。
在这些领域中,振动陀螺仪可以提供精确的方向、位置和角速度等信息,用于实时监测和控制。
总结起来,振动陀螺仪的原理是基于陀螺效应和转动稳定性的。
它通过测量和检测陀螺转子的示意运动,实现对物体旋转运动的测量。

三轴振动陀螺仪的原理
三轴振动陀螺仪是一种高精度、高灵敏度的惯性传感器,主要用于测量飞行器、导航系统等物体的角速度和角度变化。
其原理是利用陀螺效应,通过测量陀螺在三个轴向上的振动来确定物体的角速度和角度变化。
陀螺效应是指在旋转的陀螺体上施加外力时,其轴线会产生一个垂直于外力方向的力矩,使其保持原有的方向稳定不变。
这种稳定性可以用来制作陀螺仪,用于测量物体的旋转状态。
三轴振动陀螺仪由三个相互垂直的陀螺体组成,每个陀螺体都可以在其轴向上振动。
当物体发生旋转时,陀螺体会受到惯性力的作用产生相应的振动,通过测量振动信号的幅值和频率,可以计算出物体的角速度和角度变化。
三轴振动陀螺仪的精度和灵敏度取决于陀螺体的设计和制造工艺。
现代的陀螺体采用微纳加工技术制造,可以实现非常高的精度和灵敏度。
此外,三轴振动陀螺仪还可以通过信号处理和滤波技术来提高测量精度和抗干扰能力。
三轴振动陀螺仪广泛应用于航空航天、导航、惯性导航、惯性测量等领域。
在航空航天领域,三轴振动陀螺仪已成为现代飞行器的重要组成部分,可以实现高精度的姿态控制和导航功能。
在导航领域,三轴振动陀螺仪可以和其他传感器(如加速度计、磁力计等)结合
使用,实现高精度的定位和导航。
三轴振动陀螺仪是一种高精度、高灵敏度的惯性传感器,利用陀螺效应测量物体的角速度和角度变化。
其广泛应用于航空航天、导航、惯性测量等领域,是现代科技发展的重要成果之一。

三轴振动陀螺仪的原理三轴振动陀螺仪是现代惯性导航系统的核心组成部分之一。
它是一种基于陀螺效应测量旋转角速度和方向的仪器。
本文将介绍三轴振动陀螺仪的原理、构成、工作流程和应用场景。
一、三轴振动陀螺仪的原理1. 陀螺效应陀螺效应是指将陀螺仪转动时,在转速不变的情况下,它的转轴方向会发生偏转的现象。
这是由于旋转的陀螺仪具有巨大的角动量,很难改变其转轴方向,导致其转轴始终维持在原方向上。
2. 三轴振动陀螺仪的结构三轴振动陀螺仪是由三个陀螺仪组成,分别位于 X、Y、Z 三个方向上。
每个陀螺仪都可以测量其所在方向的角速度,通过将三个方向的角速度向量叠加,可以得到物体的总角速度向量。
3. 工作原理在工作时,三轴振动陀螺仪会被安装在测量对象上,并转动以保持其方向。
当测量对象开始旋转时,陀螺仪所在方向会随着旋转而发生偏转,导致在该方向上出现一个陀螺效应。
这时陀螺仪会测量出沿该方向的角速度,从而获得旋转的信息。
二、三轴振动陀螺仪的构成三轴振动陀螺仪包括三个陀螺仪,一个信号处理器、一个控制器和一个电源。
每个陀螺仪都是由一个转子和一个固定部分组成。
转子是由一个旋转的圆盘和一个陀螺轴组成,可以自由旋转。
而固定部分则包括一个支架、一个针轴和一个检测器。
当转子旋转时,陀螺效应会使其转轴和原先的方向有一个角度偏差,这时检测器会感应到转轴的偏移量,并输出相应的信号。
信号处理器则可以处理接收到的信号,并把它们转化为物体的角速度。
控制器可以决定如何使用这些数据,例如通过滤波器消除杂波或对角速度进行积分以计算出物体的角度。
三、三轴振动陀螺仪的工作流程三轴振动陀螺仪的工作流程可以简单地分为三个步骤:感知旋转、转换角速度和积分计算角度。
1. 感知旋转当三轴振动陀螺仪被安装在物体上时,它可以感知到该物体的旋转。
对于每个陀螺仪,当它随物体旋转时,它所在方向的陀螺效应会导致转轴偏离其原先的方向,并产生一个瞬时信号。
2. 转换角速度信号处理器会接收陀螺仪输出的信号,并将其转换为物体的角速度。
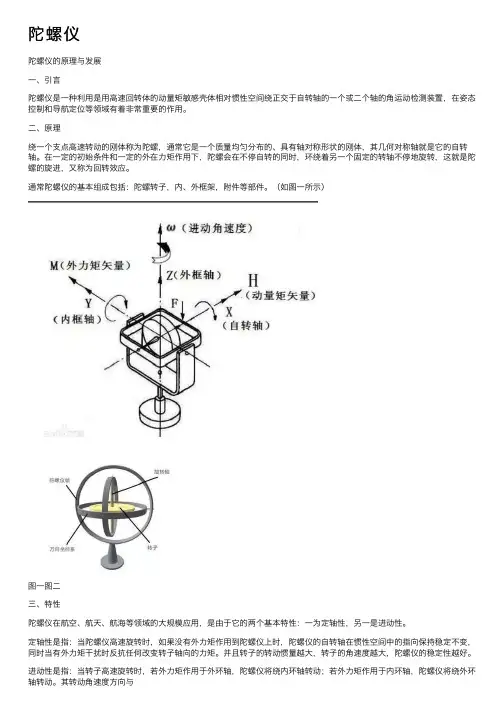
陀螺仪陀螺仪的原理与发展⼀、引⾔陀螺仪是⼀种利⽤是⽤⾼速回转体的动量矩敏感壳体相对惯性空间绕正交于⾃转轴的⼀个或⼆个轴的⾓运动检测装置,在姿态控制和导航定位等领域有着⾮常重要的作⽤。
⼆、原理绕⼀个⽀点⾼速转动的刚体称为陀螺,通常它是⼀个质量均匀分布的、具有轴对称形状的刚体,其⼏何对称轴就是它的⾃转轴。
在⼀定的初始条件和⼀定的外在⼒矩作⽤下,陀螺会在不停⾃转的同时,环绕着另⼀个固定的转轴不停地旋转,这就是陀螺的旋进,⼜称为回转效应。
通常陀螺仪的基本组成包括:陀螺转⼦,内、外框架,附件等部件。
(如图⼀所⽰)图⼀图⼆三、特性陀螺仪在航空、航天、航海等领域的⼤规模应⽤,是由于它的两个基本特性:⼀为定轴性,另⼀是进动性。
定轴性是指:当陀螺仪⾼速旋转时,如果没有外⼒矩作⽤到陀螺仪上时,陀螺仪的⾃转轴在惯性空间中的指向保持稳定不变,同时当有外⼒矩⼲扰时反抗任何改变转⼦轴向的⼒矩。
并且转⼦的转动惯量越⼤,转⼦的⾓速度越⼤,陀螺仪的稳定性越好。
进动性是指:当转⼦⾼速旋转时,若外⼒矩作⽤于外环轴,陀螺仪将绕内环轴转动;若外⼒矩作⽤于内环轴,陀螺仪将绕外环轴转动。
其转动⾓速度⽅向与外⼒矩作⽤⽅向互相垂直。
进动⾓速度的⽅向可⽤右⼿定则判断(如图⼆所⽰)即伸直右⼿,⼤拇指与⾷指垂直,⼿指顺着⾃转轴的⽅向,⼿掌朝外⼒矩的正⽅向,然后⼿掌与4指弯曲握拳,则⼤拇指的⽅向就是进动⾓速度的⽅向。
进动⾓速度的⼤⼩取决于转⼦动量矩H的⼤⼩和外⼒矩M的⼤⼩,其计算式为进动⾓速度ω=M/H。
(ω为进动⾓速度,M为外⼒矩,H为动量矩)四、陀螺仪的发展陀螺仪由1850年法国物理学家莱昂·傅科在研究地球⾃传中获得灵感⽽发明出来的,类似像是把⼀个⾼速旋转的陀螺放到⼀个万向⽀架上,靠陀螺的⽅向来计算⾓速度。
陀螺仪发明后,⾸先应⽤到航海上,后来在航空、航天等领域迎来了⼤规模应⽤,成为了最重要的仪表之⼀。
到第⼆次世界⼤战,德国⼈为了使飞弹能准确的落到⽬标上空,德国⼈研发了惯性制导系统。