自动控制系统示例
- 格式:docx
- 大小:117.97 KB
- 文档页数:5
自动控制系统例子
【篇一:自动控制系统例子】
问题太简单了
生活中看到最多的是:
1、电视机的遥控系统,它采用红外线脉冲和数字编码技术
2、洗衣机的自动控制系统,有一种是采用定时控制技术(最简单)
3、空调自动控制系统,他利用温度传感器实行压缩机是否运行
4、电饭煲控制系统,它采用水蒸发以后。
温度超过100以上,然后用温度控制器实行电路的开关
5、汽车的自动换档控制系统,利用汽车的速度传感器,检测速度,然后利用电磁控制系统实行自动换档
6、水塔的自动打水系统,利用水位传感器,检查水位是否过低和过高,过低供水过高停止
7、电瓶车、手机、笔记本等等的自动充电系统
8、宾馆商场的自动门等等,可谓数不胜数
我们公司非常欢迎勇于攀登科学技术高峰的人才,加入我们的团队。
北京联合大学实验报告课程(项目)名称:过程控制学院:自动化学院专业:自动化班级:0910030201 学号:2009100302119 姓名:张松成绩:2012年11月14日实验一交通灯控制一、实验目的熟练使用基本指令,根据控制要求,掌握PLC的编程方法和程序调试方法,掌握交通灯控制的多种编程方法,掌握顺序控制设计技巧。
二、实验说明信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始工作,按以下规律显示:按先南北红灯亮,东西绿灯亮的顺序。
南北红灯亮维持25秒,在南北红灯亮的同时东西绿灯也亮,并维持20秒;到20秒时,东西绿灯闪亮,闪亮3秒后熄灭。
在东西绿灯熄灭时,东西黄灯亮,并维持2秒。
到2秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮。
东西红灯亮维持25秒,南北绿灯亮维持20秒,然后闪亮3秒后熄灭。
同时南北黄灯亮,维持2秒后熄灭,这时南北红灯亮,东西绿灯亮……如此循环,周而复始。
如图1、图2所示。
图 1图 2三、实验步骤1.输入输出接线输入SD 输出R Y G 输出R Y G I0.4 东西Q0.1 Q0.3 Q0.2 南北Q0.0 Q0.5 Q0.42.编制程序,打开主机电源编辑程序并将程序下载到主机中。
3.启动并运行程序观察实验现象。
四、参考程序方法1:顺序功能图法设计思路:采用中间继电器的方法设计程序。
这个设计是典型的起保停电路。
方法2:移位寄存器指令实现顺序控制移位寄存器位(SHRB)指令将DATA数值移入移位寄存器。
S_BIT指定移位寄存器的最低位。
N指定移位寄存器的长度和移位方向(移位加=N,移位减=-N)。
SHRB指令移出的每个位被放置在溢出内存位(SM1.1)中。
该指令由最低位(S_BIT)和由长度(N)指定的位数定义。
方法3:利用定时器实现思路:利用多个定时器逻辑组合实现控制时序。
五、思考题1.实验中遇到的问题?如何解决的?2.对单一顺序控制—交通灯控制的几种实现方法技巧进行总结。
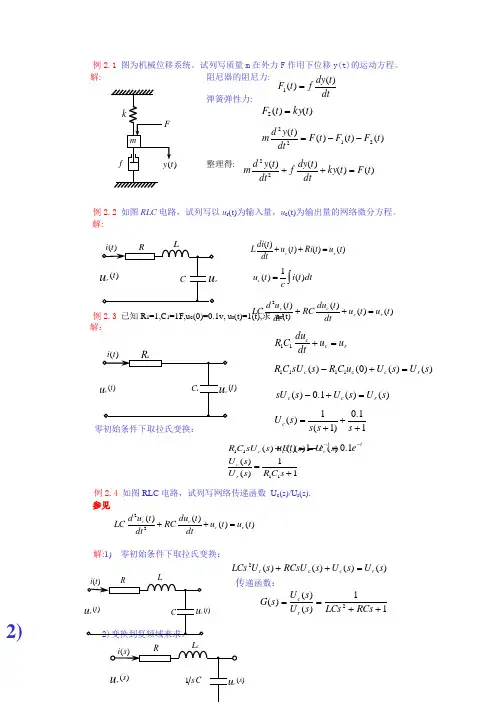
例2.1 图为机械位移系统。
试列写质量m 在外力F 作用下位移y(t)的运动方程。
解: 阻尼器的阻尼力: 弹簧弹性力:整理得:例2.2 如图RLC 电路,试列写以u r (t)为输入量,u c (t)为输出量的网络微分方程。
解:例2.3 已知R 1=1,C 1=1F,u c (0)=0.1v, u r (t)=1(t),求 u c (t) 解:零初始条件下取拉氏变换:例2.4 如图RLC 电路,试列写网络传递函数 U c (s)/U r (s). 参见)()()()(22t u t u dt t du RC dt t u d LC r c c c =++解:1) 零初始条件下取拉氏变换:)()()()(2s U s U s RCsU s U LCs rc c c =++传递函数:11)()()(2++==RCs LCs s U s U s G r c)()()(11s U s U s sU C R r c c =+11)()(11+=s C R s U s U r c dtt dy ft F )()(1=)()(2t ky t F =)()()()(2122t F t F t F dtt y d m --=)()()()(22t F t ky dt t dy f dt t y d m =++2)))()()()(t u t Ri t u dtt di L r c =++⎰=dt t i c t u c )(1)()()()()(22t u t u dt t du RC dt t u d LC r c c c =++rc c u u dt du C R =+11)()()0()(1111s U s U u C R s sU C R r c c c =+-)()(1.0)(s U s U s sU r c c =+-11.0)1(1)(+++=s s s s U c tt c e e t u --+-=1.01)()t )t )s例2.5 已知R 1=1,C 1=1F ,1)求零状态条件下阶跃响应u c (t);2) u c (0)=0.1v, u r (t)=1(t), 求 u c (t);3)求脉冲响应g(t)。
北京联合大学实验报告课程(项目)名称:过程控制学院:自动化学院专业:自动化班姓级:名:0910030201张松学成号:2009100302119绩:2012 年11 月14 日实验一交通灯控制一、实验目的熟练使用基本指令,根据控制要求,掌握PLC的编程方法和程序调试方法,掌握交通灯控制的多种编程方法,掌握顺序控制设计技巧。
二、实验说明信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始工作,按以下规律显示:按先南北红灯亮,东西绿灯亮的顺序。
南北红灯亮维持25秒,在南北红灯亮的同时东西绿灯也亮,并维持 20秒;到20秒时,东西绿灯闪亮,闪亮3秒后熄灭。
在东西绿灯熄灭时,东西黄灯亮,并维持2秒。
到2秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮。
东西红灯亮维持25秒,南北绿灯亮维持20秒,然后闪亮3秒后熄灭。
同时南北黄灯亮,维持2秒后熄灭,这时南北红灯亮,东西绿灯亮……如此循环,周而复始。
如图1、图2所示。
图1图2三、实验步骤1.输入输出接线输入SD输出R Y G输出R Y G I0.4东西Q0.1Q0.3Q0.2南北Q0.0Q0.5Q0.42.编制程序,打开主机电源编辑程序并将程序下载到主机中。
3.启动并运行程序观察实验现象。
四、参考程序方法1:顺序功能图法设计思路:采用中间继电器的方法设计程序。
这个设计是典型的起保停电路。
方法2:移位寄存器指令实现顺序控制移位寄存器位(SHRB)指令将DATA数值移入移位寄存器。
S_BIT指定移位寄存器的最低位。
N指定移位寄存器的长度和移位方向(移位加=N,移位减=-N)。
SHRB指令移出的每个位被放置在溢出内存位(SM1.1)中。
该指令由最低位(S_BIT)和由长度(N)指定的位数定义。
方法3:利用定时器实现思路:利用多个定时器逻辑组合实现控制时序。
五、思考题1.实验中遇到的问题?如何解决的?2.对单一顺序控制—交通灯控制的几种实现方法技巧进行总结。
文件编号: 31-C7-EC -7D -7A整理人 尼克自动控制系统实例框图自动控制原理知识要点与习题解析第2章 控制系统的数学模型数学模型有多种表现形式:传递函数、方框图、信号流图等。
r(t) n(t); c(t) e(t) ⋯ ; G(s) H(s) Φ(s) Φe (s) Φn (s) Φen (s);P32 (自动控制原理p23)1.知控制系统的方框图如题2-17图所示,试用方框图简化方法求取系统的传递函数。
P33解: 方框图简化要点,将回路中的求和点、分支点等效移出回路,避免求和点与分支点交换位置。
(e)Φ(s)=G 1G 2G 31+G2H 1−G 1G 2H 1+G 2G 3H 2+G 4;P37 (p73)2-21 试绘制与题2-21图中系统方框图对应的信号流图,并用梅森增益公式求传递函数C (s )/R (s ) 和误差传递函数E (s )/R (s )E (s)C (s)R (s)G 4(s) G 1(s)G 2(s)G 3(s)题2-1 7图 控制系统方框图(e)C (s)R (s) - - G 4(s)H 1(s)H 2(s) G 1(s) G 2(s) G 3(s)C (s)R (s)-G 4(s)H 1(s)/G 3(s) H 2(s)G 1(s)G 2(s)G 3(s)/[1+G 2 (s)H 1(s)] 题2-17解图 控制系统简化方框图H 1(s) C (s)R (s)--G 4(s)H 1(s) H 2(s)G 1(s)G 2(s)G 3(s) 1/G 3(s) 1/G 3(s)注:P21(2) 依据系统方框图绘制信号流图首先确定信号流图中应画出的信号节点,再根据方框图表明的信号流向,用支路及相应的传输连接信号节点。
步骤如下,(a)系统的输入为源点,输出为阱点;(b)在方框图的主前向通路上选取信号节点,即相加点后的信号和有分支点的信号,两信号是同一个信号时只作为一个节点;(c)其它通路上,仅反馈结构求和点后的信号选作节点; (d)最后,依据信号关系,用支路连接这些节点。
自动控制原理综合案例案例一:智能家居系统智能家居系统是一种应用自动控制原理的智能化系统,它通过传感器、执行器和控制器等组件,实现对家居设备的自动化控制。
例如,在智能家居系统中,可以通过设置定时器,让窗帘在特定时间自动关闭,或者通过声控功能,用语音命令打开灯光等设备。
这样的系统可以提高家居的舒适性和便利性,节省能源,提高生活质量。
案例二:自动驾驶汽车自动驾驶汽车是一种应用自动控制原理的先进技术,它通过激光雷达、摄像头、传感器等设备,采集道路信息,并通过控制器对车辆进行自动驾驶。
例如,当汽车遇到前方有障碍物时,自动控制系统可以通过传感器检测到并及时采取避障措施,保证行车安全。
自动驾驶汽车的出现,将大大提高交通流畅度和驾驶安全性。
案例三:自动化生产线自动化生产线是一种应用自动控制原理的工业生产系统,它通过传感器、执行器和控制器等设备,实现对生产过程的自动化控制。
例如,在汽车制造工厂中,自动化生产线可以实现对零部件的自动装配和检测,提高生产效率和产品质量。
自动化生产线的应用,不仅提高了生产效率,还减少了人力成本和人为误差。
案例四:智能农业系统感器、执行器和控制器等设备,实现对农作物的自动化管理。
例如,在温室中,可以利用温度传感器和湿度传感器等设备,实时监测环境参数,并通过控制器自动调节温度、湿度和光照等条件,提供适宜的生长环境,提高农作物产量和质量。
智能农业系统的应用,可以有效解决传统农业中的一些问题,提高农业生产效益。
案例五:智能医疗设备智能医疗设备是一种应用自动控制原理的医疗辅助设备,它通过传感器、执行器和控制器等设备,实现对患者的自动化监测和治疗。
例如,在心脏起搏器中,可以利用心电传感器和控制器等设备,实时监测心脏的电信号,并根据设定的参数自动调节心脏的跳动节奏,帮助患者维持正常的心脏功能。
智能医疗设备的应用,可以提高医疗效果和患者的生活质量。
案例六:智能交通系统智能交通系统是一种应用自动控制原理的交通管理系统,它通过传感器、执行器和控制器等设备,实现对交通流量和信号的自动化控制。

自动控制原理的应用自动控制原理是一门研究如何通过传感器、执行器和控制器等组件,使系统在特定要求下实现自动化运行的科学和技术。
在现代社会中,自动控制系统已经广泛应用于各个领域,如工业生产、交通运输、能源管理、环境监测等。
本文将以几个典型的应用案例为例,介绍自动控制原理在不同领域的实际应用。
一、工业生产中的自动控制在工业生产中,自动控制系统的应用可以提高生产效率、降低能源消耗,同时还能保证产品质量的稳定性。
以化工行业为例,自动控制系统可以实时监测和调节生产过程中的温度、压力、流量等参数,以确保各个环节按照预定的要求进行操作。
通过自动控制系统,不仅能够降低人工操作所带来的错误风险,还可以实现生产过程的精细化管理,提高工艺设备的利用率和经济效益。
二、交通运输中的自动控制自动控制原理在交通运输领域的应用也十分广泛。
智能交通系统是一种基于自动控制原理的交通管理系统,通过将交通信号、摄像头、车辆感应器等设备互连互通,实现对交通流量、路况状况的实时监测和调节。
智能交通系统的应用能够使交通资源得到更加合理的调度,疏通交通拥堵,提高道路通行效率,使驾驶员和行人的出行更加安全便捷。
三、能源管理中的自动控制随着能源需求的不断增长,能源管理成为一个日益重要的问题。
自动控制原理在能源管理领域的应用,可以实现对能源消耗的精确计量和控制。
以智能家居为例,通过传感器和控制器,可以实时监测和控制家庭中各个设备的用电情况,以便合理利用能源资源、降低能源的浪费。
同时,自动控制系统还可以与能源供应商的系统进行互联互通,实现能源的远程监控和管理。
四、环境监测中的自动控制自动控制原理在环境监测领域的应用,可以实现对环境参数的快速检测和监测,提高环境保护的效率和精确度。
例如,在空气污染监测中,自动控制系统可以通过传感器实时监测环境中的污染物浓度等指标,通过控制器对污染源进行调控,以减少排放量,优化环境。
此外,在水质监测、噪音监测等环境监测领域,自动控制系统也发挥着重要作用。
自动控制原理综合案例案例一:智能家居系统智能家居系统是一种基于自动控制原理的智能化家居解决方案。
通过使用传感器、执行器和控制器等设备,可以实现对家庭环境的智能化管理和控制。
例如,通过温度传感器和空调控制器,可以实现自动调节室内温度的功能;通过光照传感器和窗帘控制器,可以实现自动调节室内光照的功能;通过人体传感器和照明控制器,可以实现自动感知人员活动并自动调节照明亮度的功能。
智能家居系统的实现,不仅可以提高家庭生活的便捷性和舒适度,还可以节省能源并提高安全性。
案例二:自动驾驶汽车自动驾驶汽车是基于自动控制原理的创新应用。
通过激光雷达、摄像头、GPS、惯性导航等传感器和控制算法,实现了对汽车的自动驾驶功能。
自动驾驶汽车可以通过感知周围的道路、交通标志和其他车辆,自主决策并控制汽车的行驶。
例如,在高速公路上,自动驾驶汽车可以根据车辆间的距离和速度,自动调整车速和保持车辆的安全间距。
在道路上遇到交通信号灯时,自动驾驶汽车可以自动识别信号灯的状态,并自动刹车或加速。
自动驾驶汽车的出现,不仅可以提高交通安全性,还可以减少交通拥堵和节约能源。
案例三:工业自动化生产线工业自动化生产线是基于自动控制原理的现代化生产方式。
通过使用传感器、执行器和控制器等设备,可以实现对生产过程的自动化控制和管理。
例如,在汽车生产线上,通过使用机器人和自动控制系统,可以实现对焊接、喷涂、组装等工艺的自动化操作;在电子产品生产线上,通过使用自动化设备,可以实现对印刷、贴片、焊接等工艺的自动化控制。
工业自动化生产线的应用,不仅可以提高生产效率和产品质量,还可以降低人力成本和减少生产过程中的人为误差。
案例四:智能农业系统智能农业系统是基于自动控制原理的农业生产解决方案。
通过使用传感器、执行器和控制器等设备,可以实现对农田环境和农作物的智能化管理和控制。
例如,通过土壤湿度传感器和灌溉控制器,可以实现自动调节灌溉水量和灌溉时间的功能;通过温湿度传感器和温室控制器,可以实现自动调节温室内的温度和湿度的功能;通过光照传感器和光照控制器,可以实现自动调节植物生长所需的光照强度的功能。
自动控制系统示例
计算机硬盘锤渭数据系统
硬盘是计算机中的主要存储设备之一,主要由盘片、磁头及其驱动机构、主轴电路板以及接口等几部分组成,图1.13是其简化示意图。
所有盘片装在盘片主轴上盘片之间平行,由主轴电机带动盘片高速旋转。
每张盘片的存储面上有一个磁头,高精度的磁头驱动机构驱动磁头在高速旋转的磁盘表面上沿盘片径向移动。
读/写磁头、传动手臂和传动轴三部分构成磁头组件,而磁头驱动机构则由磁头驱动电机(也称为音圈电机)、磁头驱动小车、防振动装置构成,它能够对磁头进行精确的驱动和定位,并能在很短的时间内精确定位在系统指令指定的数据磁道,由磁头进行读/写数据的操作。
计算机硬盘既可以读取存储在其中的数据,也可以将数据存储在其中。
下面以读数据为例介绍硬盘读/写系统的工作过程。
硬盘驱动器加电正常工作以
后,主轴电机启动并带动盘片高速旋转,磁头驱动机构设过钽电容转动手臂将浮动磁头置于盘片表面的oo道,处于等待指令的启动状态。
接收到系统传来的指令信号后,经过放大,磁头驱动电机通过转动手臂来控制磁头对盘片数据信息进行正确定位,并通过探测磁颗粒极性的变化来谈取数据,然后将数据放大并传输到接口电路,反馈给主机系统完成指令操作,该系统通过读取一条预先记录的索引磁道的误差获得误差信号。
图1.14是硬盘读取数据的方块图,图中的传感器指盘片中的话磁头及索引磁道。
水加热自动控制系统
图为水加热自动控制系统(即热水电加热器)示意图。
显见,系统由控温开关、电加热器、温度测量装置、水箱及保温层等组成。
控制目的是维持水箱内水温在给定的温度上。
该系统的工作原理分析如下:电加热器的通断电由控温开关控制,以保持期
望的水温。
温度测量装置将热TAJD477K004RNJ能转化为电能,给定温度为一电信号。
需要热水时,打开阀门,水箱中流出热水并补充冷水。
若水箱中的水温低于给定水温,温度测量装置(即反馈元件)将实际水温测量出来,回送到输入端,与给定温度相比较,产生一个伯差信号。
在这个偏差信号的作用下,控温开关控制电加热器工作,使实际
水温趋于,直至等于给定温度。
在水加热自动控制系统中,被控对象为水箱,输
入量为给定水温,输出量(被控量)为水箱实际水温,主要扰动为放出热水并注入冷水
而产生的降温作用,次要扰动为环境温度的变化,保温层、温度测量装置及电加热器
等元件结构参数的变化等。
由此,可绘制系统的方块团如图1.16所示。
防空导弹制导系统
防空导弹是一种由地面(或舰船)发射,拦截敌方来袭的空中目标(如飞机或巡航导弹的
武器,制导控制系统是其重要的组成部分之一,它的功用是:引导和控制导弹有效拦
截并摧毁目标。
图1.17所470uF 4V D示为防空导弹指令制导系统示意图。
该系统的工作过程是:目标跟踪雷达和导弹跟踪雷达不断探测并跟踪目标和导弹,并将测得的目标和导弹的运动参数送至制导计算机,制导计算机根据目标运动参数和
导弹运动参数及选定的导引规律计算井产生编码控制指令,该指令由指令发送设备发
送至导弹上;导弹上的指令接收机接收并将其转换成控制导弹运动的控制指令,自动
驾驶仪根据这一控制指令控制导弹飞向目标,最终摧毁目标。
实际上,上述导弹
制导过程就是按偏差控制的过程。
即:导弹在飞向目标酌过程中,制导系统不断地测
量导弹的实际运动与理想运动之间的倔差,根据此偏差的大小和方向形成控制指令,
在此指令的作用下,通过控制系统(即自动驾驶仪)控制导弹改变运动姿态,消除偏差。
因
1.18是该系统的方块图。
对自动控制系统的要求
自动控制系统的基本任务就是应用控制装置去控制被控对象,使其被控量按照要求变化。
为了提高控制质量,必须对控制系统在控制过程中所表现出的性能提出要求。
通常,对自动控制系统的基本要求可归结为稳定性、快速性和准确性,简称稳、准、快。
稳定性
稳定性是对控制系统最基本的要求,是保证控制系统正常工作的必要条件,不稳定的
控制系统不能实现预定的控制任务。
稳定性是指系统在平衡状态下受到扰动作用后,
系统恢复原有平衡状态的能力。
稳定性通常由系统的结构和参数决定,与外界因素无关。
对于恒值系统,稳定性贴片钽电容要求当系统受到扰动后,经过一定时间的调整
能够回到原来的期望值。
对于随动系统,稳定性要求过渡过程结束后,被控制量始终
跟随输人量的变化。
此外,稳定系统的过渡过程收敛,而不稳定系统的过渡过程是发
散的。
快速性是指控制系统对输入信号响应的快慢,即过渡过程持续的时间长短。
统对输入信号响应的形式,即过渡过程的形式对快速性影响甚大。
一般将过渡妇性和
振荡性能通称为控制系统的动态性能,且都有具体要求。
稳定性和快速性反映对
控制系统过渡过程的要求。
准确性
推确性是对控制系统的控制精度提出的要求,用稳态误差来衡量,也称为稳态性能。
稳定的控制系统在过渡过程结束后所处的状态称为稳态,稳态误差是指稳态时系统输
出量的期望值与实际值之差。
显然,稳态误差越小,表示系统输出旦跟随输入量的精
度超高,故设计时希望稳态误差要小。
例如,在电动机闭环调速系统中,希望因负载
扰动引起的稳态转速的变化要尽量小;在随动系统中,希望输出信号与输入信号尽量
一致,即同步
更多详细专业资料参考http://www.cdindustries.hk
自动控制理论主要研究的问题
自动控制理论主要研究如下两方面的问题。
1.分析
在控制系统的结构和参数已经确定的条件下,对控制系统的性能进行分析,并提出改善性能的途径。
即,对于一个具体的控制系统,如何从理论上对它的稳定性、动态性能和稳态精度进行定性分析和定量计算。
2.综合根据控制系统要实现的任务,给出稳态和动态性能指标,系统满足给定的性能指标。
即,根据对控制系统性能的要求使控制系统的性能能全面地满足技术上的要求。
并确定适当的参数,使控制如何合理地设计校正装置。
cjmc%ddz
(注:素材和资料部分来自网络,供参考。
请预览后才下载,期待你的好评与关注!)。