基于SPCE061A机器人假肢语音识别控制系统
- 格式:pdf
- 大小:228.48 KB
- 文档页数:2
嵌入式技术• Embedded Technology176 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】嵌入式假肢 智能控制系统 语音识别目前市面上的大多数假肢主要是通过脑电信号与肌电信号来进行控制的,不过,由于脑电信号的信息率低,而肌电信号又需要进行复杂的信号处理,容易造成残疾人的肌肉出现酸痛感,这也使目前市面中的假肢都存在一定的不足,这给残疾人的生活带来许多不便。
为了弥补这些不足,本文将语音识别技术应用于嵌入式假肢中,通过语音识别技术来对残疾人的语音信号进行识别,以此实现残疾人对嵌入式假肢的控制目的。
为此,以下便对嵌入式假肢智能控制系统中语音识别技术进行深入的研究。
1 嵌入式假肢智能控制系统中语音识别技术的研究1.1 技术结构分析在嵌入式假肢智能控制系统中,语音识别技术在硬件结构上分为语音识别芯片、扩展电路以及功能模块三个组成部分。
由语音识别芯片对残疾人所发出的语音信号进行识别,并通过内部语音识别程序来对语音信号进行处理,然后将处理结果发送给功能模块进行执行。
1.2 语音识别芯片在嵌入式假肢智能控制系统中,语音识别芯片的型号为SPCE061A ,该芯片高度集成了MCU 、RAM 、A/D 、D/A 与ROM ,该芯片具有内积运算功能以及16*16位的乘法运算功能。
SPCE061A 能够对各种复杂的数字信号进行处理,其处理性能强大,价格低廉,而且能够进行中断处理。
语音识别芯片可对至少10个中断源及中断向量进行有效支持,这使其在实时语音识别及处理方面有着非常明显的应用优势,同时其还具有自动增益控制功能,这能够使残疾人通过麦克风来进行语音控制,从而大大提高了残疾人对嵌入式假肢的控制便利性。
嵌入式假肢智能控制系统中语音识别技术文/张烨 刘恒1.3 扩展电路在扩展电路中,分布有语音采集电路、电源模块、程序下载模块、音频输出模块、扩展存储模块以及通信模块,扩展电路会通过语音采集电路来采集语音信号,然后通过模数转换存储至控制芯片中。
基于SPCE061A 单片机采集语音信号的设计与实现
随着单片机集成化程度的不断提高,现代单片机已经具备了数字信号处
理功能,使语音信号处理用单片机实现成为可能。
台湾凌阳科技公司(SunPlus) 推出的一款SPCE061A 就是这样的产品。
SPCE061A 是以μ”nSP TM16 位微控制器及信号处理器芯片为内核的16 位单片机,采用模块式集成结构,片内集
成了2KB RAM、32KB Flash、ADC、DAC、并行I/O 等,特别适合语音信号处理。
本文介绍如何实现用SPCE061A 单片机采集语音信号,并传送到PC 机
中的方法。
1 硬件系统结构
1.1 SPCE061A 结构
SPCE061A 的内部结构如图1,其特点如下:
*16 位μ”nSP TM 微控制器;
*工作电压:VDD 为2.6~3.6V(CPU),VDDH 为VDD~5.5V(I/O);
*CPU 时钟为0.32~49.152MHz;
*内置存储器:SRAM 为2KB,内存Flash 为32KB;
*可编程音频处理;
*2 个16 位可编程定时器/计数器;
*7 通道10 位ADC(内置麦克风放大和自动增益控制功能);
*2 个10 位DAC;
*32 路可编程通用输入输出端口;
*串行输入输出接口;
*低电压监测/低电压复位功能;
*14 个中断源可来自定时器、外部时钟输入、键唤醒等;。
基于SPCE061A单片机的摘要:利用凌阳16位单片机的特性,根据语音识别的基本原理,设计了一种语音控制机器人,利用C语言和汇编语言进行系统软件编程,最终完成了可以通过对语音的识别,自动完成向前走、倒退、左转、右转、跳舞、向左瞄准、向右瞄准、发射、连续发射等功能的智能机器人的设计。
关键词:语音识别语音控制单片机语音是人类交流的最自然、最方便的手段,因而也必然成为人与计算机之间交流最自然、最方便的手段之一。
随着语音技术的发展和成熟,利用语音识别技术进行对各种设备的控制已成为当今识别技术的研究的前沿课题和发展方向之一。
语音识别技术近几年来的飞速发展,无论是语音识别的识别效果、识别方式的多样化、抗噪声性及功能价格比等方面均有了质的变化,已经达到全面应用的阶段;特别是陆续推出的低价位、高识别性能、具有SD、SI、SV、SA等丰富语音识别内容的语音识别处理器,掀开了语音识别技术在电子产品普及应用的新局面。
能听话、讲话、唱歌的机器人才是真正的智能机器人,凌阳SPCE061A单片机提供的语音识别软件模块是极好的语音识别控制平台,实现了语音控制机器人的目的[1]。
本设计就是在这样的基础上,利用凌阳SPCE061A单片机技术实现语音识别的控制系统,采用人声控制,使操作向简单,方便,高效发展。
一、凌阳SPCE061A单片机的主要特点SPCE061A 是凌阳科技公司µ’nSPTM (Microcontroller And Signal Processor) 系列产品中的16位微控制器芯片,内置32k闪存,其较高的处理速度使芯片能够非常容易、快速地处理复杂的数字信号,适用于数字语音识别等应用领域。
在2.6V~3.6V工作电压范围内, SPCE061A 的工作速度范围为0.32~49.152MHz,具备8通道10位ADC 输入功能,内置的具有自动增益控制的麦克风输入功能,双通道10位DAC音频输出功能及A、B两个I/O口输入输出功能[2]。

第六届IT文化节系列活动之----嵌入式系统设计基于凌阳SPCE061A 语音控制智能小车一、前言:凌阳公司开发的SPCE061A 芯片为带音频信号处理功能的16 位单片机。
所以根据该芯片的特色,适合开发具有语音互动功能的儿童智能玩具。
目前在智能玩具市场上,都是日本做的比较先进,例如日本推出的一个比较成功的机器狗,很可爱,很受孩子们的欢迎。
根据凌阳SPCE061A 芯片的强大功能,我们中国也可以开发出先进的智能玩具。
本方案就是利用语音识别技术来控制小车的运动。
利用语音可以控制小车的前进、后退、左转、右转和按预设轨迹行走的功能。
在语音操作的时候,都会有相应的语音提示,很人性化。
另外如果再加上红外光电对管对小车轮子进行速度测量,并用数码管显示出来。
也可以由红外光电光电管构成循迹模块和小车结合。
由此构成智能小车控制系统。
二、小车平台的搭建:(1)小车底板采用加厚12*18cm 万用板:通过在该万用板的相应位置钻孔来固定轮子及其他附件。
图一 万用板(2)前轮采用万向轮:图二 万向轮(3)后轮则用两个大扭矩减速电机:转弯原理:就是控制两个电机的转速的不同,即一个慢一个快便可实现转弯。
或者一个电机停转,只让其中一个电机转,可实现快速转弯。
两个电机同时转便可实现前进、后退。
图三 减速电机(3)电机驱动采用由L298集成电机驱动芯片组成的电路图四 L298芯片电机驱动电路或者是由三极管组成的桥式电路:图四 桥式电机驱动电路该电路可以驱动两个电机,并且每个通道有两个输入端,通过SPCE061A 的IO 管脚控制每个通道两个输入端的高低电位便可实现控制电机的正反转,通过PWM 信号还可以对电机进行调速,其中PWM 信号可由SPCE061A 的定时器设定来产生。
该电路板焊好后,如下所示:图五 桥式驱动电路板实际效果图 (4)整体效果图:图六 整体效果图扩展功能:(由于时间等问题,改部分还未完善)(1)红外光电管1(检测速度用):图七 红外光电管1该光电管驱动电路比较简单,如下图所示:图八 红外光电管1 驱动电路该红外管封装了一个发射管和一个接收管,只要在小车后轮上加一片挡板,而该红外光电管置于挡板相应位置让挡板刚好可以遮住光电管的中间间隙。
SPCE061A是凌阳公司设计的一种16位单片机,该款单片机资源丰富,具有极高的性价比,该单片机内置有2路DA转换,8路AD转换及在线仿真,并且有16×16位的乘法运算和内积运算的DSP功能,这为它进行复杂的语音数字信号的压缩编码与解码提供了便利,还可以做数字滤波器。
这些特点为我们进行在语音处理尤其是语音识别领域的应用提供了便利。
语音识别技术在各个层面均有广泛的应用前景。
电脑软件领域,例如:语音命令、语音输入,对话系统、查询系统、教学软件、游戏软件等;消费性电子产品领域,例如:电子记事本、声控玩具、语音拔号功能的手机等;工业产品领域,例如:车用移动电话、车用导航系统等;电话系统领域,例如:语音识别总机服务、语音拔号、语音订票订位等。
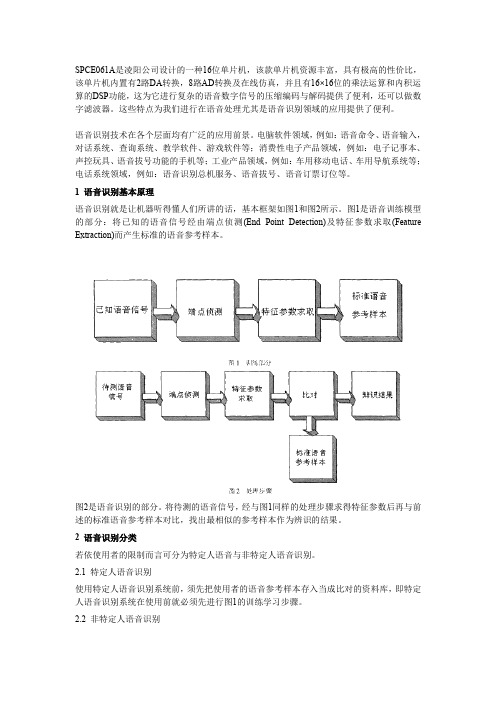
1 语音识别基本原理语音识别就是让机器听得懂人们所讲的话,基本框架如图1和图2所示。
图1是语音训练模型的部分:将已知的语音信号经由端点侦测(End Point Detection)及特征参数求取(Feature Extraction)而产生标准的语音参考样本。
图2是语音识别的部分。
将待测的语音信号,经与图1同样的处理步骤求得特征参数后再与前述的标准语音参考样本对比,找出最相似的参考样本作为辨识的结果。
2 语音识别分类若依使用者的限制而言可分为特定人语音与非特定人语音识别。
2.1 特定人语音识别使用特定人语音识别系统前,须先把使用者的语音参考样本存入当成比对的资料库,即特定人语音识别系统在使用前就必须先进行图1的训练学习步骤。
2.2 非特定人语音识别使用本系统前根本不需要先学习,便能直接使用。
一套最佳的语音识别系统是不须经过学习便能进行语音识别,但通常辩识率都比较低。
另外以说话方式的连续是否又可分为非连续语音识别和连续语音识别。
对于非连续语音来说,识别所说的每一个字必须分开辨认;而连续语音识别可以一般自然流利的说话方式来进行人性化的语音识别,但由于关系到相连音的问题,很难达到好的辨认效果。
2020.09科学技术创新APP 进行操作,这样就能提升智慧医疗服务的效率和质量,能够有助于提高就诊率。
2.2.3发展健康小屋自助健康服务“互联网+”背景下的智慧医疗的发展过程中,需要和时代的发展需求相适应,将“服务于民”作为重要的核心理念,通过健康小屋自助健康服务的发展,建立标准化健康档案,深化医疗卫生体制改革,提高社区服务中心社会地位,个人标准化健康数据建档以及整合共享等,精准慢性病的防治,这些都能有助于促进和优化智慧医疗的发展。
2.2.4注重网络医院以及移动医疗发展智慧医疗的发展要充分利用现代网络技术,网络医院通过互联网为依托,利用大数据以及物联网的技术,能够开展在线医疗服务,如健康咨询以及预约挂号等,通过这一强大医疗数据库的运用,就能有助于提升个性化精准医疗的水平。
计算机以及移动互联网技术的运用下,注重系统平台提供移动影像应用功能,个性化以及高级影像处理,这就能达到实时医患沟通以及移动医疗的目标,提升医疗的质量水平。
3结论总之,智慧医疗的发展过程中,要联系时代背景,和“互联网+”的时代发展需要相结合,创新智慧医疗发展的模式,转变医疗服务的思维方式。
在互联网的技术应用下,就能大大的促进智慧医疗的良好发展。
参考文献[1]何畅,王子豪,李铜印.“互联网+医疗”背景下中医院门诊智慧药房建设探讨[J].医学信息学杂志,2019,40(8):20-23.[2]郭宁.“互联网+”医疗背景下医保智慧结算平台的研究[J].信息与电脑(理论版),2019(9):56-59.[3]陈希曦.“互联网+”背景下智慧医疗应用现状分析[J].计算机产品与流通,2019(2):126.[4]程宇卿.“互联网+”模式下的智慧医疗体系[J].世界最新医学信息文摘,2018,18(56):199,204.基金项目:广西重点研发计划《基于大数据的区域“互联网+”智慧医疗医保服务系统开发及应用》(课题编号:2017AB18048)。
基于SPCE061A的小车语音控制系统
引言
语音控制系统是一种智能化系统,目前国内较成型的语音控制产品还不多,因此,进行这方面的研究是很有意义的。
SPCE061A是一款16位微控制器,其高速的处理和特殊的内核结构使它能够非常快速地处理复杂的数字信号,同时其内嵌32KB的FLASHROM和
2KB的SRAM能够存储所需的数据和程序,特别是其所提供的语音识别函数
可供方便地进行调用,不需要过多地考虑语音算法,为语音识别设计带来了很大的方便。
本文选用SPCE061A作为该系统的控制核心,系统硬件结构如图1 所示。
图1系统硬件结构图
方案论证
主控模块和语音处理模块的选择
较MCS-51系列单片机而言,SPCE061A单片机内部集成有32KB的ROM、2KB的SRAM,更能满足软件对空间的要求,且不需要扩展相关存储器。
另外,该类单片机完全支持C语言,软件编写比较方便,语音处理模块采用凌阳的语音压缩算法,也用软件来实现。
该单片机内部集成有A/D、D/A转
换功能,方便实现语音录放功能。
电机模块的选择
电机模块选择直流电机。
与步进电机相比较而言,直流电机具有转速快、控制方便等特点,更能够满足小车较高速行驶情况的要求,如图2所示。
基于SPCE061A的机器人语音识别系统设计肖凯夫【摘要】为使机器人更好的为人类服务,本文分析了基于SPCE061A的,机器人语音识别系统的设计方案、方法,旨在强化机器人娱乐、服务、对话等多种功能,为人类提供更高水平的服务.【期刊名称】《电声技术》【年(卷),期】2019(043)003【总页数】3页(P29-30,33)【关键词】SPCE061A;机器人;语音识别;系统设计【作者】肖凯夫【作者单位】湖南财经工业职业技术学院,湖南衡阳421002【正文语种】中文【中图分类】TN912.3台湾凌阳设计的16位单片机即SPC0E61A。
它内置32位10端口、2路DA转换以及14个中断源等。
SPC0E61A具有DSP应用价值,能够高效高质处理信息,时钟频率最高能够达到49 MHz,计算效率高、成本低、适用范围广,其为机器人语音录放、识别、合成、判断等提供了条件。
分析将SPC0E61A应用于机器人语音识别系统设计中具有现实意义。
1 机器人语音识别系统设计总览1.1 语音识别系统语音识别即为语言识别,语音识别系统需要依托硬件平台建立,它是一个操作系统,主要包括两个阶段,一是训练阶段,该阶段工作内容是建立声音识别单元,进行语音信号的采集、分析;二是识别阶段,该阶段工作内容是应用识别方法,对语音信息进行分类、比较、识别结果。
从机器人使用者的角度出发,可将语音识别系统分为3种,一是特定人的语音识别系统;二是非特定人语音识别系统;三是多人语音识别系统。
从机器人所识别的词汇量出发亦可以系统分为3种,一是小词汇量识别系统;二是中等词汇量识别系统;三是大词汇量识别系统。
可见,系统的分类从不同角度可以进行不同划分,且随着科技的变化,识别系统也趋于精细化、多样化[1]。
1.2 语音信号处理根据机器人语音识别技术原理,其内含5个重要模块,即信号预(前期)处理模块、与信号信息相对应的提取模块、具有训练功能的训练模块、识别语音信号的模块以及判断语音信号的模块,除此之外,还包括语音信息后期的处理模块。
SPCE061A在智能语音识别避障机器人中的设计应用关键字: SPCE061A 语音识别避障机器人超声波传感器1 引言为了提高广大单片机爱好者学习单片机的兴趣,凌阳科技教育推广中心推出了应用SPCE061A作为主控制器,外加电机驱动电路制作的智能机器人。
该机器人采用特定人语音识别对机器人进行控制,可以完成向前走、倒退、左转、右转、跳两首舞曲、向左瞄准、向右瞄准、发射、连续发射等功能。
在此基础上,配合凌阳科技教育推广中心推出的超声波测距模组,为机器人增加了活动过程中实时检测前方障碍物、遇到障碍停止运动并向前方发射飞盘等功能,进一步丰富了机器人的功能,可以大大提高在校学生学习单片机的兴趣。
2 模组特性简介2.1 SPCE061A特性简介SPCE061A是凌阳科技研发生产的性价比很高的一款十六位单片机,使用它可以非常方便灵活的实现语音的录放系统,该芯片拥有8路10位精度的ADC,其中一路为音频转换通道,并且内置有自动增益电路。
这为实现语音录入提供了方便的硬件条件。
两路10位精度的DAC,只需要外接功放(SPY0030A)即可完成语音的播放。
另外凌阳十六位单片机具有易学易用的效率较高的一套指令系统和集成开发环境。
在此环境中,支持标准C语言,可以实现C语言与凌阳汇编语言的互相调用,并且,提供了语音录放的库函数,只要了解库函数的使用,就会很容易完成语音录放,这些都为软件开发提供了方便的条件: 特性:, 16位μ'nSP微处理器;, 工作电压:内核工作电压VDD为3.0,3.6V(CPU),IO口工作电压VDDH为VDD,5.5V(I/O);, CPU时钟:0.32MHz,49.152MHz;, 内置2K字SRAM;, 内置32K闪存ROM;, 可编程音频处理;, 晶体振荡器;, 系统处于备用状态下(时钟处于停止状态),耗电小于2μA@3.6V;, 2个16位可编程定时器/计数器(可自动预置初始计数值);, 2个10位DAC(数-模转换)输出通道;, 32位通用可编程输入/输出端口;, 14个中断源可来自定时器A / B,时基,2个外部时钟源输入,键唤醒;, 具备触键唤醒的功能;, 使用凌阳音频编码SACM_S240方式(2.4K位/秒),能容纳210秒的语音数据; , 锁相环PLL振荡器提供系统时钟信号;, 32768Hz实时时钟;, 7通道10位电压模-数转换器(ADC)和单通道声音模-数转换器;, 声音模-数转换器输入通道内置麦克风放大器和自动增益控制(AGC)功能;, 具备串行设备接口;, 低电压复位(LVR)功和低电压监测(LVD)功能;, 内置在线仿真板(ICE,In- Circuit Emulator)接口。