基于ICCP匹配算法的海底地形匹配辅助导航
- 格式:pdf
- 大小:202.16 KB
- 文档页数:4
第17卷第2期 中国惯性技术学报 V ol.17 No.2 2009年4月 Journal of Chinese Inertial Technology Apr. 2009 文章编号:1005-6734(2009)02-0191-06地形匹配辅助导航中匹配区域的选择郑 彤1,2,蔡龙飞1,王志刚2,边少锋2(1. 海军驻四三八厂军事代表室,武汉 430064; 2. 海军工程大学 导航工程系,武汉 430033) 摘要:利用海底地形匹配辅助导航是水下载体导航技术致力研究的新方向。
通过多波束测深系统测量获得的真实地形数据,采用ICCP算法为对准匹配算法,分析了实测地形的统计特征对相关匹配性能的影响,给出了地形匹配区域选择准则,并在实测地形图上利用匹配算法对此进行了仿真研究,从而得到水下载体的最佳匹配位置,提高水下载体的导航精度。
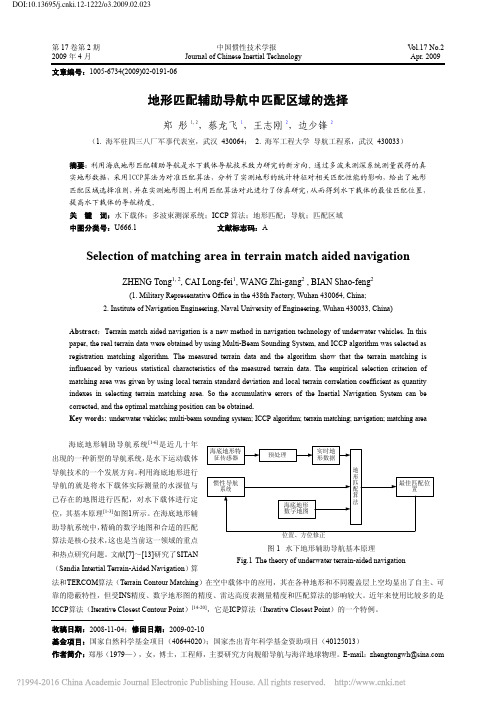
关 键 词:水下载体;多波束测深系统;ICCP 算法;地形匹配;导航;匹配区域 中图分类号:U666.1文献标志码:ASelection of matching area in terrain match aided navigationZHENG Tong 1, 2, CAI Long-fei 1, WANG Zhi-gang 2 , BIAN Shao-feng 2(1. Military Representative Office in the 438th Factory, Wuhan 430064, China;2. Institute of Navigation Engineering, Naval University of Engineering, Wuhan 430033, China)Abstract :Terrain match aided navigation is a new method in navigation technology of underwater vehicles. In this paper, the real terrain data were obtained by using Multi-Beam Sounding System, and ICCP algorithm was selected as registration matching algorithm. The measured terrain data and the algorithm show that the terrain matching is influenced by various statistical characteristics of the measured terrain data. The empirical selection criterion of matching area was given by using local terrain standard deviation and local terrain correlation coefficient as quantity indexes in selecting terrain matching area. So the accumulative errors of the Inertial Navigation System can be corrected, and the optimal matching position can be obtained.Key words: underwater vehicles; multi-beam sounding system; ICCP algorithm; terrain matching; navigation; matching area海底地形辅助导航系统[1-6]是近几十年出现的一种新型的导航系统,是水下运动载体导航技术的一个发展方向。

基于ICCP的水下潜器地形辅助导航方法研究的开题
报告
一、选题背景及意义
水下潜器在海洋工程、地质、水产、军事等领域中发挥着重要作用,而水下环境的特殊性质使得水下潜器导航和定位成为了一项具有挑战性
的任务。
传统水下潜器导航依赖于水下声纳或者惯性导航系统,但是由
于地形复杂等问题,这些方法存在着一些缺陷。
因此,研究基于ICCP协议的水下潜器地形辅助导航方法具有非常重要的意义。
二、研究内容及方法
本研究旨在通过建立ICCP的地形信息交换模型,将水下潜器所获取到的地形信息与其他水下潜器共享,利用地形信息协同完成水下潜器的
导航和定位。
具体研究内容包括:
1. ICCP协议的研究与分析;
2. 地形信息的获取和处理方法;
3. 基于ICCP协议的水下潜器地形辅助导航方法的研究和实现;
4. 实验验证和系统性能评估。
三、研究创新点及难点
1. 创新点:通过基于ICCP协议的地形信息交换模型,实现水下潜器间的共享,提高水下潜器的导航和定位精度。
2. 难点:如何解决水下潜器环境复杂、信号传输受限、水下通讯困
难等问题,以实现高精度的地形辅助导航。
四、研究意义
本研究在水下潜器导航和定位领域具有重要意义,通过利用地形信息辅助导航,可以提高水下潜器的定位精度和效率,为水下科学、工程和军事等领域的发展做出贡献。
此外,本研究的实现也可以为其他环境下的多个机器人协作提供新的思路和方法。



基于海底底质及地形特征的地形辅助导航适配区选择方法常乐;程建华;葛靖宇;周欣进
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)7
【摘要】随着多波束测深技术的不断发展,地形辅助导航广泛应用于海上舰船。
本文针对传统特征参数没有包含深度以及海底底质因素而导致水下地形导航适配区判定不准确的问题,提出基于海底底质及区域地形特征的地形辅助导航适配区选择方法。
本方法基于多波束探测数据,对区域地形数据进行统计分析,通过层次分析法对地形特征参数以及海底底质等适配性评价指标进行综合分析,得出权重向量并构建适配区选择准则函数,对匹配区域进行适配性判断。
利用ICCP算法进行地形匹配蒙特卡洛仿真实验,实验结果表明,适配性选择函数克服了传统特征参数对匹配区域分析不全面的问题,可有效选择适配区,适配区内匹配误差小于5 m。
【总页数】6页(P148-153)
【作者】常乐;程建华;葛靖宇;周欣进
【作者单位】哈尔滨工程大学智能科学与工程学院
【正文语种】中文
【中图分类】U666
【相关文献】
1.基于地形熵的地形适配区选择准则研究
2.基于地形图像特征与模糊决策的海底地形可导航性分析方法
3.基于熵值法赋权灰色关联决策的地形辅助导航适配区选择
4.
基于约束粒子群优化的海底地形辅助惯性导航定位方法5.UUV海底地形匹配导航的适配性高效分析方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于仿射修正技术的水下地形ICCP匹配算法徐晓苏;吴剑飞;徐胜保;王立辉;李佩娟【期刊名称】《中国惯性技术学报》【年(卷),期】2014(000)003【摘要】ICCP匹配算法是水下组合导航系统中最为重要的匹配算法。
针对传统ICCP匹配算法存在仅对水下航行器惯性导航系统指示航迹作旋转和平移的刚性变换的局限性问题,为提高水下航行器地形辅助导航系统中匹配算法的精度,分析了水下航行器惯性导航系统误差特性,建立了误差模型,提出了基于仿射修正技术的水下地形ICCP匹配算法。
首先利用ICCP匹配算法对惯性导航系统指示航迹进行刚性变换,再利用最小二乘法求解仿射参数,进而对 ICCP 匹配航迹进行仿射修正。
仿真研究表明,基于仿射修正技术的ICCP匹配算法能较好地解决传统ICCP匹配算法刚性变换的局限性,匹配精度优于传统ICCP算法,匹配误差小于数字地图网格间距的50%,同时仿射修正所耗费时间极少,所增加的时间仅为传统ICCP匹配算法匹配时间的千分之一。
%ICCP is the most important matching algorithm used in underwater integrated navigation system. Traditional ICCP algorithm can only do rigid transformation (rotation and translation) for the indicated track of underwater vehicle’s INS. In order to overcome this problem and improve the accuracy of track matching, the error characteristics of INS are analyzed, and the error model of INS is established. Then a new ICCP algorithm based on affine correction is put forward. The track indicated by INS is transformed according to the ICCP algorithm. The affine parameters are solved with the least squares method.The ICCP matching track is modified by affine transformation. The simulations show that the defects of traditional ICCP algorithm can be avoided by affine correction, and the matching result is better than thoseof traditional ICCP algorithm, in which the matching error is less than 50% of digital map grid spacing. Meanwhile, the additional time consumed in affine correction is just about one thousandth of that in traditional ICCP algorithm.【总页数】6页(P362-367)【作者】徐晓苏;吴剑飞;徐胜保;王立辉;李佩娟【作者单位】微惯性仪表与先进导航技术教育部重点实验室,南京 210096; 东南大学仪器科学与工程学院,南京 210096;微惯性仪表与先进导航技术教育部重点实验室,南京 210096; 东南大学仪器科学与工程学院,南京 210096;微惯性仪表与先进导航技术教育部重点实验室,南京210096; 东南大学仪器科学与工程学院,南京 210096;微惯性仪表与先进导航技术教育部重点实验室,南京 210096; 东南大学仪器科学与工程学院,南京 210096;微惯性仪表与先进导航技术教育部重点实验室,南京 210096; 东南大学仪器科学与工程学院,南京 210096【正文语种】中文【中图分类】U666.1【相关文献】1.基于仿射参数估计的地磁匹配导航算法 [J], 解伟男;李清华;奚伯齐;屈桢深2.基于ICCP和TERCOM的水下地形匹配组合算法研究 [J], 张立;杨惠珍3.基于稀疏转稠密机制的仿射不变特征匹配算法 [J], 李云天;朱颖琪;李征;孙晓雨4.基于分块和仿射不变性的SIFT图像匹配算法 [J], 涂婷;陆济湘5.基于最大稳定极值区域仿射不变特征的无人机影像匹配算法研究 [J], 陈钟鸿因版权原因,仅展示原文概要,查看原文内容请购买。
基于ICCP算法的地磁匹配定位方法李豫泽;石志勇;杨云涛;冯俊【摘要】基于ICCP算法的地磁匹配定位可以用于限制惯导系统随时间增长的位置误差.给出ICCP算法的设计思想并进行推广,使算法能够在地磁测量数据存在误差的情况下,实现对惯导的误差校正.同时采用滑动窗口技术来快速寻找等值线上的最近点,在每一次收敛到局部最小的过程中都减少了寻找最近点的计算量,计算效率得以很大程度的提高.【期刊名称】《现代电子技术》【年(卷),期】2008(031)020【总页数】4页(P122-124,127)【关键词】ICCP算法;自主无源导航;地磁匹配;误差校正【作者】李豫泽;石志勇;杨云涛;冯俊【作者单位】军械工程学院,河北,石家庄,050003;军械工程学院,河北,石家庄,050003;军械工程学院,河北,石家庄,050003;军械士官学校,湖北,武汉,430075【正文语种】中文【中图分类】TJ765;TN9661 引言实时确定载体的位置和速度,是提高武器装备独立作战能力和整体作战能力的重要手段,也是提高制导武器性能的基本要求。
目前,导航定位的主要方式包括惯性导航和卫星导航等。
惯性导航,不借助任何外来信息,也不向外辐射任何信息,能够在全天候条件下,在全球范围内和任何介质环境里自主地、隐蔽地进行连续的三维空间定位和三维空间定向,能够提供完整的导航参数,但是它的缺点是导航误差随时间积累,长时间使用必须校正。
虽可采用GPS、无线电和天文导航等信息对惯性导航系统进行校正,但这些方法增加了载体被发现的危险性。
随着无源导航技术的发展,地磁导航技术的出现为实现这一目标提供了新的技术途径。
由于地磁场在全球范围内各点值都不相同,理论上与经纬度是一一对应的,同时某些地区磁场特征也很明显,因此地磁导航成目前研究的一个热点。
地磁导航技术在获取地磁信息时对外无能量辐射,具有良好的隐蔽性,因此可以实现载体长期高精度定位。
地磁导航就是利用地磁图特征与当地即时测量磁特征信息进行匹配导航的过程。
一种结合地形和环境特征的水下导航定位方法徐晓苏;汤郡郡;张涛;岳增阳【摘要】为了实现水下潜器长时间高精度导航定位,同时考虑到传统地形辅助导航系统在先验地形图不可得或者是地形变化不明显的海域(地形不可匹配区域),无法用来修正惯性导航位置误差的问题,提出了一种结合地形和环境特征的水下导航定位方法.在先验地形图可得且地形高程变化明显的可匹配区域,采用地形辅助导航系统来修正惯导位置误差,在先验地形图不可得或者是地形高程变化不明显的不可匹配区域,采用基于海洋环境特征的同步定位与构图算法来修正惯导位置误差.仿真结果表明,该方法在地形可匹配区域以及地形不可匹配区域得到的航迹都比纯惯导得到的轨迹更接近于理想航迹,因此可以用来修正惯导位置误差.【期刊名称】《中国惯性技术学报》【年(卷),期】2015(023)005【总页数】7页(P590-596)【关键词】水下航行器;地形辅助导航系统;同步定位与构图;惯性导航系统【作者】徐晓苏;汤郡郡;张涛;岳增阳【作者单位】微惯性仪表与先进导航技术教育部重点实验室,南京210096;东南大学仪器科学与工程学院,南京210096;微惯性仪表与先进导航技术教育部重点实验室,南京210096;东南大学仪器科学与工程学院,南京210096;微惯性仪表与先进导航技术教育部重点实验室,南京210096;东南大学仪器科学与工程学院,南京210096;微惯性仪表与先进导航技术教育部重点实验室,南京210096;东南大学仪器科学与工程学院,南京210096【正文语种】中文【中图分类】U666.1惯性导航系统不需要任何外来信息,也不向外辐射任何信息,仅依靠自身就能在全天候条件下,在全球范围内和任何介质环境中进行连续的导航和定位,这种同时具备自主性、隐蔽性和能获取载体完备运动信息的独特优点使其成为最受广泛使用的水下导航定位方法。
但是,惯导系统也有着系统误差随时间积累的原理性缺陷,为了实现长航时高精度的导航目标,惯性导航系统需要利用外界位置信息对其进行周期的调整和校正。
专利名称:基于三角形匹配算法改进的ICCP水下地磁匹配方法
专利类型:发明专利
发明人:黄浩乾,王鹏,唐家成
申请号:CN202010116489.4
申请日:20200225
公开号:CN111397599A
公开日:
20200710
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于三角形匹配算法改进的ICCP水下地磁匹配方法,提出一种利用约束粒子群算法优化估计航路改进的ICCP算法。
构建三角形匹配模型,确定估计点的匹配搜索范围,得到约束粒子群算法的一个约束条件;利用不同三角形之间刚性旋转和平移变换得到的矩阵函数,将导航系统累积误差对匹配精度的影响数学化,同时定义不同三角形之间的匹配度原则,得到约束粒子群算法的另一个约束条件;利用约束粒子群优化算法得到匹配三角形和惯性导航指示三角形两质心点之间的最小欧式距离,得到更新点作为下一次循环的确定点,依次迭代,规划出最终航行路径。
提高了水下地磁信息的利用率,降低ICCP匹配算法的原理缺陷和惯导累积误差对匹配精度的影响。
申请人:河海大学
地址:210024 江苏省南京市鼓楼区西康路1号
国籍:CN
代理机构:南京苏高专利商标事务所(普通合伙)
代理人:柏尚春
更多信息请下载全文后查看。